Изобретение относится к радиотехнике и предназначено для улучшения приема навигационных сигналов навигационной аппаратурой (НАЛ) глобальной навигационной системы (ГНСС) на фоне преднамеренных помех, создаваемых системой радиоподавления для несанкционированной НАЛ ГНСС. Источниками преднамеренных помех могут быть генераторы навигационных сигналов, расположенные в воздушном пространстве или на Земле, полностью копирующие формат полезных спутниковых навигационных сигналов. Наличие преднамеренных помех может отрицательно сказываться на функционировании санкционированной НАЛ ГНСС.
Известно устройство для пространственной селекции сигналов навигационных космических аппаратов с использованием пеленгования источников радиопомех [1], содержащее антенную решетку, имеющую антенные элементы, блоки диаграммообразующих множителей, контроллер фазированной антенной решетки (ФАР), сумматор, коммутатор, гетеродин, ведущий приемный канал, в который входят смеситель ведущего приемного канала, усилитель промежуточной частоты, и аналого-цифровой преобразователь, ведомый приемный канала, в который входят смеситель, усилитель промежуточной частоты, и аналого-цифровой преобразователь, фазовый детектор ФД, контроллер вычисления координаты постановщика радиопомех.
В этом устройстве для подавления помех используется способ пространственной селекции, обеспечивающий формирование глубоких провалов в диаграмме направленности антенной решетки НАП в направлениях на источники помехи и формирование главного лепестка в направлении прихода полезного сигнала.
Недостатком данного устройства является то, что он не позволяет скомпенсировать помехи, направления прихода которых близки к направлению прихода полезного сигнала.
Целью изобретения является устранение вышеизложенного недостатка за счет компенсации преднамеренных помех в санкционированной НАП ГНСС в направлениях, близких к направлениям на источник полезного сигнала.
Поставленная цель достигается тем, что дополнительно к известному устройству вводится блок компенсации преднамеренных помех, состоящий из блока базы данных с информацией о частотно-временной структуре преднамеренных помех, генератора копий преднамеренных помех, блоков весовых коэффициентов, регулирующих амплитуду и фазу копии каждой помехи, блока оценки весовых коэффициентов, сумматора, на выходе которого формируется итоговая сумма копий преднамеренных помех, вычитателя, в котором сумма копий преднамеренных помех вычитается из входного сигнала, поступающего от устройства пространственной селекции сигналов на один из входов вычитателя, при этом блок базы данных подключен к генератору копий преднамеренных помех, выходы генератора преднамеренных помех подключены к соответствующим входам блока оценки весовых коэффициентов и входам блоков весовых коэффициентов, выходы которых подключены к сумматору, выход которого подключен к одному из входов вычитателя, к другим входам блоков весовых коэффициентов подключены выходы блока оценки весовых коэффициентов.
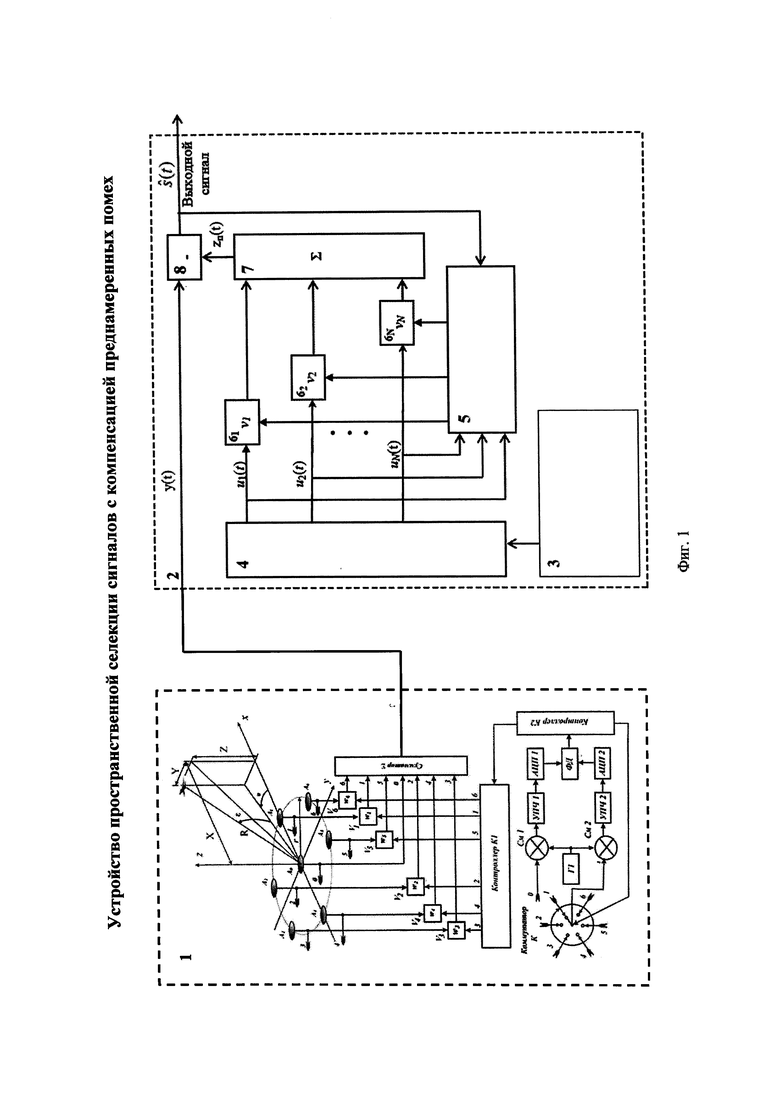
Сущность устройства пространственной селекции сигналов с компенсацией преднамеренных помех поясняется следующим рисунком. На фиг. 1 показана функциональная схема устройства пространственной селекции сигналов с компенсацией преднамеренных помех.
Устройство пространственной селекции сигналов с компенсацией преднамеренных помех состоит из устройства пространственной селекции сигналов 1 и блока компенсации преднамеренных помех 2.
Устройство пространственной селекции сигналов 1 состоит из антенной решетки имеющей антенные элементы А0, А1 А2, А3, А4, А5, А6, блоков диаграммообразующих множителей w1, w2, w3, w4, w5, w6, контроллера фазированной антенной решетки (ФАР) К1, сумматора Σ, коммутатора К, гетеродина Г1, ведущего приемного канала, в который входят смеситель ведущего приемного канала См 1, усилитель промежуточной частоты (УПЧ) ведущего приемного канала УПЧ1, аналого-цифровой преобразователь (АЦП) ведущего приемного канала АЦП 1, ведомого приемного канала, в который входят смеситель ведомого приемного канала См 2, УПЧ ведомого приемного канала УПЧ 2, АЦП ведомого приемного канала АЦП 2, фазовый детектор ФД, контроллер вычисления координаты постановщика радиопомех контроллер К2.
Антенная решетка, имеющая антенные элементы А0, А1, А2, A3, А4, А5, А6, выполнена в виде кольцевой фазированной антенной решетки, у которой в центре кольца размещен ведущий антенный элемент А0, а на расстоянии r, равным половине длины помехового сигнала, по кругу на равном расстоянии друг от друга ведомые антенные элементы А1, А2, А3, А4, А5, А6.
Блок компенсации преднамеренных помех 2 состоит из блока базы данных 3 с информацией о частотно-временной структуре преднамеренных помех, генератора копий преднамеренных помех 4, блока оценки весовых коэффициентов 5, блоков весовых коэффициентов 61, 62 …, 6N регулирующих амплитуду и фазу копии каждой помехи, сумматора 7, на выходе которого формируется итоговая сумма копий преднамеренных помех, вычитателя 8, в котором сумма помех вычитается из входного сигнала, на выходе вычитателя 8 формируется итоговый сигнал, очищенный от преднамеренных помех.
Устройство пространственной селекции сигналов с компенсацией преднамеренных помех имеет следующую связь между элементами. Выход ведущего антенного элемента А0 соединен с нулевым входом блока сумматора и с одним из входов смесителя ведущего приемного канала См 1. Выход ведомого антенного элемента A1 соединен с одним из входов блока диаграммообразующего множителя w1 и с первым входом коммутатора К. Выход ведомого антенного элемента А2 соединен с одним из входов блока диаграммообразующего множителя w2 и со вторым входом коммутатора К. Выход ведомого антенного элемента A3 соединен с одним из входов блока диаграммообразующего множителя w3 и с третьем входом коммутатора К. Выход ведомого антенного элемента А4 соединен с одним из входов блока диаграммообразующего множителя w4 и с четвертым входом коммутатора К. Выход ведомого антенного элемента А5 соединен с одним из входов блока диаграммообразующего множителя w5 и с пятым входом коммутатора К. Выход ведомого антенного элемента А6 соединен с одним из входов блока диаграммообразующего множителя w6 и с шестым входом фазового коммутатора К. Первый выход контроллера ФАР К1 соединен с одним из входов блока диаграммообразующего множителя w1 выход, которого соединен с первым входом сумматора Σ. Второй выход контроллера ФАР К1 соединен с одним из входов блока диаграммообразующего множителя w2 выход, которого соединен со вторым входом сумматора Σ. Третий выход контроллера ФАР К1 соединен с одним из входов блока диаграммообразующего множителя w3 выход, которого соединен с третьим входом сумматора Σ. Четвертый выход контроллера ФАР К1 соединен с одним из входов блока диаграммообразующего множителя w4 выход, которого соединен с четвертым входом сумматора Σ. Пятый выход контроллера ФАР К1 соединен с одним из входов блока диаграммообразующего множителя w5 выход, которого соединен с пятым входом сумматора Σ. Шестой выход контроллера ФАР К1 соединен с одним из входов блока диаграммообразующего множителя w6 выход, которого соединен с шестым входом сумматора Σ. Выход коммутатора К соединен с одним из входов смесителя ведомого приемного канала См 2. Выход гетеродина Г1. соединен с одним из входов смесителя ведущего приемного канала См 1 и с одним из входов смесителя ведомого приемного канала См 2. Выход смесителя ведущего приемного канала См 1 соединен с входом УПЧ 1. Выход УПЧ 1 соединен с входом АЦП 1 выход, которого соединен с одним из входов фазового детектора ФД. Выход смесителя ведомого приемного канала См 2 соединен с входом УПЧ 2. Выход УПЧ 2 соединен с входом АЦП 2 выход, которого соединен с одним из входов фазового детектора ФД. Выход фазового детектора ФД соединен с входом контроллера вычисления координаты постановщика радиопомех К2. Один из выходов контроллера вычисления координаты постановщика радиопомех К2 соединен с контроллером ФАР К1, другой выход соединен с входом коммутатора К имеющим возможность переключать соединение между антенными элементами А1, А2, А3, А4, А5, А6 и смесителем ведомого приемного канала См 2.
Выход сумматора Σ устройства пространственной селекции сигналов 1 соединен с входом вычитателя 8 блока компенсации преднамеренных помех 2. Блок базы данных 3 подключен к генератору копий преднамеренных помех 4. Выходы генератора преднамеренных помех 4 подключены к соответствующим входам блока оценки весовых коэффициентов 5 и соответствующим входам блоков весовых коэффициентов 61, 62 …, 6N, выходы которых подключены к соответствующим входам сумматора 7, выход которого подключен к одному из входов вычитателя 8. К другим входам блоков весовых коэффициентов 61, 62 …, 6N подключены соответствующие выходы блока оценки весовых коэффициентов 5. Выход вычитателя 8 подключен к блоку оценки весовых коэффициентов 5 и одновременно является выходом устройства пространственной селекции сигналов с компенсацией преднамеренных помех.
Работа устройства пространственной селекции сигналов с компенсацией преднамеренных помех осуществляется следующим образом.
Выходной сигнал ведущего антенного элемента А0 поступает на один из входов смесителя ведущего приемного канала См 1. На другой вход смесителя канала См 1 поступает сигнал гетеродина Г1, общего для ведущего и ведомого приемных каналов. Смеситель ведущего приемного канала См 1 переносит поступающий сигнал на промежуточную частоту и подает его на вход усилителя промежуточной частоты УПЧ 1. Выходной сигнал усилителя промежуточной частоты УПЧ 1 поступает в аналого-цифровой преобразователь АЦП 1 и далее на вход 1 фазового дискриминатора ФД.
Коммутатор К последовательно по командам, поступающим от контроллера К2, подключает ко входу 1 смесителя См 2 выходы антенн А1, … Ai, … А6. Смеситель См 2 переносит поступающий сигнал на промежуточную частоту и подает его на вход усилителя промежуточной частоты УПЧ 2. Выходной сигнал усилителя промежуточной частоты УПЧ 2 поступает в аналого-цифровой преобразователь АЦП 2 и далее на один из вход фазового дискриминатора ФД.
Фазовый дискриминатор ФД последовательно определяет разность начальных фаз Ψ1, … Ψi, … ΨN сигнала на выходе АЦП 1 и сигнала на выходе АЦП 2 при подключении ко входу См 2 последовательно выходов антенн А1, … Ai, … А6. Полученные значения Ψ1, … Ψi, … ΨN поступают на вход контроллера К2.
Контроллер К2 рассчитывает угол места е и азимутальный угол а источника радиопомех. В случае подавления НАЛ ГНСС отношение помеха/сигнал и помеха/шум на входе приемного устройства составляет 30-40 дБ. Поэтому допустимо определение угла места ε и азимутального угла α источника радиопомех посредством решения системы уравнений вида 
В общем случае координаты постановщика радиопомех определяют с использованием методов статистической радиотехники [2-4].
Полученные значения ε и α поступают на вход контроллера К1.
Контроллер К1 рассчитывает комплексные диаграммообразующие множители w1, … wi, … w6 посредством решения системы уравнений
В выражении (2) через Gn обозначены желаемые уровни диаграммы направленности в направлении, характеризуемом азимутальным углом αn и углом места εn. При этом в направлении прихода радиопомех, выдаваемом контроллером К2, целесообразно принять желаемое значение диаграммы направленности равным нулю, а в направлении прихода сигнала от НКА - единице.
Блоки диаграммообразующих множителей w1, w2, w3, w4, w5, w6, образуют произведения выходных сигналов антенн x1 … xi … х6 и комплексных весовых коэффициентов умножителей w1 … wi … w6, и подают их на входы сумматора Σ. На выходе сумматора Σ появляется выходной сигнал


который поступает в блок компенсации преднамеренных помех 2 на вход вычитателя 8.
В выходном сигнале сумматора (3) отсутствуют преднамеренные радиопомехи, направления прихода которых не совпадают с направлением прихода полезного радиосигнала. Преднамеренные радиопомехи, направления прихода которых близки к направлению прихода полезного сигнала, остаются вместе с полезным сигналом и поступают в блок компенсации преднамеренных помех 2 на вход вычитателя 8.
В блоке компенсации преднамеренных помех 2 генератор копий преднамеренных помех 4, используя информацию об их частотно временной структуре, хранящейся в блоке базы данных 3, формирует копии помех u1(t), u2(t), … uN(t), которые умножаются на комплексные весовые коэффициенты v1(t), v2(t), … vN(t) в блоках весовых коэффициентов 61, 62 …, 6N, регулирующих амплитуду и фазу копий помех, и поступают в сумматор 7, на выходе которого формируется сумма копий помех
zn(t)=V(t)U(t),
где V(t)=[v1(t),v2(t),…vN(t)] - вектор-строка весовых коэффициентов, U(t)=[u1(t),u2(t),…,uN(t)]T - вектор-столбец копий преднамеренных помех;
Сумма копий помех zn(t)=V(t)V(t) вычитается в вычитателе 8 из входного сигнала y(t)=s(t)+z(t) с суммой преднамеренных помехам z(t), формируя оценку полезного сигнала на выходе устройства

Степень компенсации помех существенным образом зависит от значений коэффициентов вектора V(t). Расчет вектора V(t), обеспечивающего минимизацию преднамеренных помех в выходном сигнале за счет регулировки амплитуд и фаз копий помех, осуществляет блок оценки весовых коэффициентов 5 с помощью рекурсивного метода наименьших квадратов [5] в виде
 0.3<λ1≤1,
0.3<λ1≤1,
где верхний индекс «T» означает комплексное сопряжение и транспонирование, K(t) - вектор-столбец, рассчитываемый по формуле [5]

Здесь P(t-1) - оценка обратной корреляционной матрицы копий преднамеренных помех. Обновление оценки обратной корреляционной матрицы осуществляется с помощью уравнения
 0.3<λ2≤1.
0.3<λ2≤1.
Начальное значение вектора V(0) принимается равным единичному вектору, а в качестве исходного значения матрицы Р(0) используется диагональная матрица вида Р(0)=cI, где с>>1, I - единичная матрица.
Этим достигается компенсации преднамеренных помех, направления прихода которых близки к направлению прихода полезного сигнала. Для лучшей эффективности компенсации желательно выбирать преднамеренные помехи минимально коррелированными с полезным сигналом.
Литература
1. Патент 2619800 РФ, МПК H01Q 3/36, G01S 3/74. Устройство для пространственной селекции сигналов навигационных космических аппаратов с использованием пеленгования источников радиопомех / А.В. Журавлев и др. (РФ); Открытое акционерное общество научно-внедренческое предприятие «ПРОТЕК» (РФ). - №2016121307; Заявлено 30.05.2016; Опубл. 18.06.2017, Бюл. 14. - 10 с.: 1 ил..
2. Монзинго Р.А., Миллер Т.У Адаптивные антенные решетки. Введение в теорию. Перевод с английского под ред. В.А. Лексаченко. - М.: Изд. «Радио и связь », 1986, 448 с.: ил. - с. 13.
3. Ашихмин А.В., Козьмин В.А., Рембовский А.М., Сергиенко А.Р. Технические характеристики и особенности построения автоматических радиопеленгаторов семейства «Артикул»// Спецтехника и связь - 2008 -№2 - с. 26-35.
4. Рембовский A.M., Ашихмин А.В., Козьмин В.А. Радиомониторинг: задачи, методы, средства/ Под ред. A.M. Рембовского.- М: Горячая линия-Телеком. 2006. - 492 с.
5. Сергиенко А.Б. Алгоритмы адаптивной фильтрации: особенности реализации в MATLAB. Exponenta Pro, №1, 2003. С. 18-28.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для пространственной селекции сигналов навигационных космических аппаратов с использованием пеленгования источников радиопомех | 2016 |
|
RU2619800C1 |
| РАДИОЛОКАЦИОННОЕ ПРИЕМНОЕ УСТРОЙСТВО | 1984 |
|
SU1841013A1 |
| КОМПЕНСАТОР РАДИОПОМЕХ ДЛЯ ОБЕСПЕЧЕНИЯ ЭЛЕКТРОМАГНИТНОЙ СОВМЕСТИМОСТИ ОТЕЧЕСТВЕННОЙ НАП ГНСС С ОТЕЧЕСТВЕННЫМ СРЕДСТВОМ РАДИОПОДАВЛЕНИЯ НАП ПРОТИВНИКА ПРИ РАБОТЕ НА СОВПАДАЮЩИХ ЧАСТОТАХ | 2014 |
|
RU2563973C1 |
| Способ пространственной компенсации помех с использованием информации о направлении на источник сигнала | 2022 |
|
RU2788820C1 |
| Компенсатор помех для навигационной аппаратуры потребителя глобальной навигационной спутниковой системы | 2017 |
|
RU2660140C1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ В ОБЛАСТИ БОКОВЫХ ЛЕПЕСТКОВ АНТЕННЫ РАДИОЛОКАТОРА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1990 |
|
SU1840239A1 |
| Частотный компенсатор для обеспечения электромагнитной совместимости отечественного передатчика радиопомех НАП ГНСС противника с отечественной НАП ГНСС при их одновременной работе на совпадающих частотах | 2016 |
|
RU2608584C1 |
| Комбинированная адаптивная антенная решетка | 2020 |
|
RU2750858C1 |
| Временной компенсатор для обеспечения электромагнитной совместимости отечественного передатчика радиопомех НАП ГНСС противника с отечественной НАП ГНСС при их одновременной работе на совпадающих частотах | 2016 |
|
RU2608585C1 |
| Способ компенсации помеховых сигналов в комбинированной адаптированной антенной решетке | 2020 |
|
RU2747377C1 |
Изобретение относится к радиотехнике. Устройство состоит из блока компенсации преднамеренных помех, состоящего из блока базы данных с информацией о частотно-временной структуре преднамеренных помех, генератора копий преднамеренных помех, блоков весовых коэффициентов, регулирующих амплитуду и фазу копии каждой помехи, блока оценки весовых коэффициентов, сумматора, на выходе которого формируется итоговая сумма копий преднамеренных помех, вычитателя, в котором сумма копий преднамеренных помех вычитается из входного сигнала, поступающего от устройства пространственной селекции сигналов на один из входов вычитателя. При этом блок базы данных подключен к генератору копий преднамеренных помех, выходы генератора преднамеренных помех подключены к соответствующим входам блока оценки весовых коэффициентов и входам блоков весовых коэффициентов, выходы которых подключены к сумматору, выход которого подключен к одному из входов вычитателя, к другим входам блоков весовых коэффициентов подключены выходы блока оценки весовых коэффициентов. Технический результат заключается в улучшении приема навигационных сигналов навигационной аппаратурой (НАП) глобальной навигационной системы (ГНСС) на фоне преднамеренных помех, создаваемых системой радиоподавления для несанкционированной НАП ГНСС. 1 ил.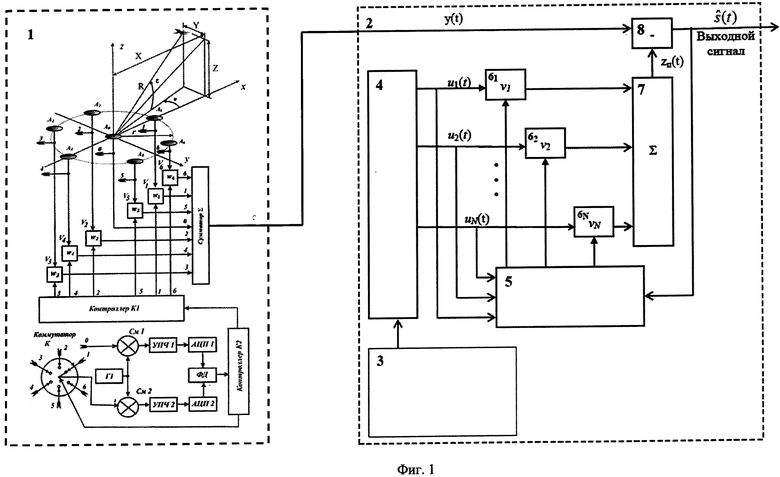
Устройство пространственной селекции сигналов с компенсацией преднамеренных помех, состоящее из антенной решетки, имеющей антенные элементы, блоков диаграммообразующих множителей, контроллера фазированной антенной решетки (ФАР), сумматора, коммутатора, гетеродина, ведущего приемного канала, в который входят смеситель ведущего приемного канала, усилитель промежуточной частоты (УПЧ) ведущего приемного канала, аналого-цифровой преобразователь (АЦП) ведущего приемного канала, ведомого приемного канала, в который входят смеситель ведомого приемного канала, УПЧ ведомого приемного канала, АЦП ведомого приемного канала, фазовый детектор, контроллера вычисления координаты постановщика радиопомех, отличающееся тем, что дополнительно введен блок компенсации преднамеренных помех, состоящий из блока базы данных с информационной в частотно-временной структуре преднамеренных помех, генератора копий преднамеренных помех, блока оценки весовых коэффициентов, блоков весовых коэффициентов, сумматора, вычитателя; блок базы данных подключен к генератору копий преднамеренных помех, выходы генератора копий преднамеренных помех подключены к соответствующим входам блока оценки весовых коэффициентов и соответствующим входам блоков весовых коэффициентов, выходы которых подключены к соответствующим входам сумматора блока компенсации преднамеренных помех, выход которого подключен к одному из входов вычитателя, к другим входам блоков весовых коэффициентов подключены выходы блока оценки весовых коэффициентов, выход вычитателя подключен к блоку оценки весовых коэффициентов и одновременно является выходом устройства пространственной селекции сигналов с компенсацией преднамеренных помех; при этом:
- генератор копий преднамеренных помех формирует копии преднамеренных помех u1(k), u2(k), …, uN(k), используя информацию об их частотно-временной структуре;
- копии помех умножаются на комплексные весовые коэффициенты ν1(k), ν2(k), …, νN(k), регулирующие амплитуду и фазу копий помех, и поступают в сумматор, на выходе которого формируется сумма копий помех
 ,
,
где  - вектор-строка весовых коэффициентов,
- вектор-строка весовых коэффициентов,
U(t)=[u1(t), u2(t), …, uN(t)]T- вектор-столбец копий преднамеренных помех;
- сумма копий помех  вычитается в вычитателе из входного сигнала y(t)=s(t)+z(t) с суммой преднамеренных помех z(t), формируя оценку полезного сигнала на выходе устройства
вычитается в вычитателе из входного сигнала y(t)=s(t)+z(t) с суммой преднамеренных помех z(t), формируя оценку полезного сигнала на выходе устройства
 ;
;
- рекурсивная оценка вектора коэффициентов, обеспечивающих минимизацию преднамеренных помех в выходном сигнале, на каждой итерации осуществляется следующим образом:
 , 0.3<λ≤1,
, 0.3<λ≤1,
где верхний индекс «T» означает комплексное сопряжение и транспонирование, K(t) - вектор-столбец, рассчитываемый по формуле
 , 0<λ≤1,
, 0<λ≤1,
где P(k-1) - оценка обратной корреляционной матрицы преднамеренных помех; обновление которой осуществляется с помощью рекурсивного уравнения
 , 0.3<λ2≤1,
, 0.3<λ2≤1,
на выходе вычитателя формируется итоговый сигнал, очищенный от преднамеренных помех НАП ГНСС в направлениях, близких к направлениям на источник полезного сигнала.
| Устройство для пространственной селекции сигналов навигационных космических аппаратов с использованием пеленгования источников радиопомех | 2016 |
|
RU2619800C1 |
| МЕТЕОРОЛОГИЧЕСКАЯ СИСТЕМА | 2011 |
|
RU2480791C2 |
| US 4761650 A, 02.08.1988 | |||
| МАЛОГАБАРИТНАЯ НАВИГАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2016 |
|
RU2613342C1 |

