Область техники
Настоящее изобретение относится к радионавигационным системам определения местоположения аппаратуры потребителей, использующих режим дифференциальных поправок в навигационном поле систем ГЛОНАС/GPS и доуточнения этого навигационного поля, в особых случаях, посредствам дополнения его необходимым количеством геодезически обеспеченных радионавигационных точек, что повышает надежность и точность навигационного обеспечения аппаратуры потребителя навигационной информации.
Уровень техники
На настоящий момент известны две функционирующие глобальные спутниковые радионавигационные системы, это Глобальная система местоопределения (GPS) [Navigation (USA) 1978, v 25, N 2] и Глобальная спутниковая радионавигационная система (ГЛОНАС) [заявка WO 91/11732 от 08.08.91 (G 01 S 5/14 A1)].
Вышеназванные спутниковые радионавигационные системы реализуют следующие режимы работы навигационного местоопределения объекта-потребителя:
- штатный режим навигационных определений;
- дифференциальный режим навигационных определений.
Под штатным режимом понимается режим навигационных определений координат аппаратуры потребителей навигационной информации по наблюдениям не менее четырех навигационных космических аппаратов (НКА).
Под дифференциальным режимом понимается режим навигационных определений, в котором аппаратура потребителя корректирует результаты навигационных определений штатного режима посредством дополнительной навигационной информации, получаемой от контрольно-корректирующей станции (ККС), и окончательная погрешность местоопределения аппаратуры потребителя уменьшается [Шебшаевич В. С., Балов А.В., Химулин В.И. Развитие дифференциального метода навигационных определений в спутниковой РНС ГЛОНАС, Радионавигация и время, РИРВ, 1992].
Совместное использование обоих вышеназванных спутниковых радионавигационных систем дает возможность повысить надежность и точность навигационных определений проводимых аппаратурой потребителя.
Эффективность применения дифференциального режима зависит от того, насколько одинаковы погрешности измерений на ККС и у аппаратуры потребителя в моменты навигационных измерений. Это определяется характером корректирующей информации, расстоянием между ККС и аппаратурой потребителя, периодичностью обновления информации и способом передачи корректируемой информации аппаратуре потребителя.
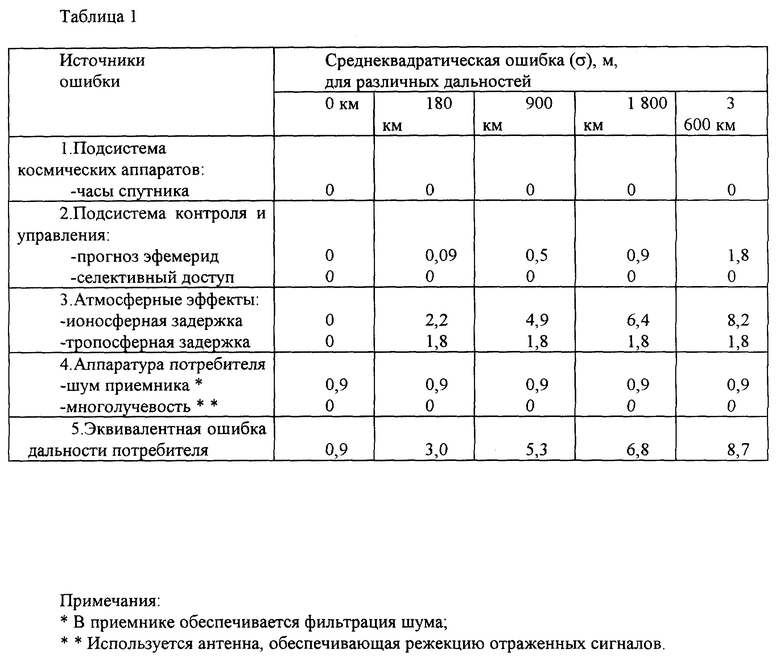
В таблице 1 приведен бюджет ошибок для навигационного поля системы GPS в дифференциальном режиме в зависимости от дальности между ККС и аппаратурой потребителя.
Очевидно, что при увеличении дальности ошибка дифференциальной поправки возрастает. Принято считать целесообразным учет поправки дифференциального режима на территории, ограниченной расстоянием между ККС и объектом- потребителем в 150-180 км, такие системы получили название Локальных дифференциальных навигационных систем.
Для охвата больших территорий дифференциальной навигационной системой предлагаются проекты региональных дифференциальных сетей (WAAS - широкозонная дифференциальная система (США), LAAS - дифференциальная подсистема, разрабатываемая Европейскими странами для обслуживания своего региона, проект Российской широкозонной дифференциальной системы, MTSAT - система аналогичная европейской разрабатывается Японией).
Логика работы региональной сети состоит в следующем: ККС общим числом n ведут непрерывные наблюдения всех попадающих в их зоны видимости НКА. Результаты измерений по каналам связи передаются в вычислительный центр, который выполняет оперативное уточнение орбит наблюдаемых НКА, вычисляет корректирующие поправки и по каналам связи передает их потребителям. Зона действия региональной системы - территория региона (страны) и прилегающие к ней районы.
Основные проблемы, возникающие при реализации таких проектов можно охарактеризовать следующим образом:
- время развертывания региональной системы можно оценивать периодом в десяток лет, что, безусловно, создаст определенные трудности потребителям высокоточной навигационной информации;
- поддержание нормальной работы региональной системы в период ее функционирования в рамках декларируемых технических характеристик (дополнение и обновление орбитальной группировки НКА, а также поддерживание наземного сегмента системы в рабочем состоянии) требуют значительных затрат;
- поддержание сплошного навигационного поля высокоточного определения местоположения аппаратуры потребителя по всей территории региона и в любой момент времени обеспечить невозможно, а в ряде случаев нецелесообразно.
Следовательно, целесообразно располагать такими мобильными наземными средствами, которые бы позволяли оперативно на ограниченный период времени обеспечивать аппаратуре потребителя возможность высокоточного определения на ограниченной территории (50 км) средствами дифференциальных навигационных систем.
Кроме того, в частных случаях возможность высокоточного определения местоположения аппаратуры потребителя должна быть ограничена, т.е. санкционирован или несанкционирован доступ к такой квазилокальной системе (например, для некоторых военно-прикладных задач и т.п.).
Наиболее близким аналогом к изобретению по уточнению местоопределения объекта с помощью дифференциальной коррекции является патент US N 5621646 от 15 апреля 1997 года, сущность которого состоит в следующем.
Пространство дифференциальных поправок формируется на основе HC от не менее 4-х НКА системы GPS и сети опорных станций. Каждая из опорных станций принимает сигнал от наблюдаемых НКА на частотах L1 и L2. Любая из опорных станций, принимая HC каждого наблюдаемого НКА, вычисляет остаток (ошибку) псевдодальности, ионосферную задержку навигационного сигнала для каждого НКА и рассогласование бортовых часов НКА и часов опорной станции, получивших название дифференциальной поправки (ДП) дальности между НКА и объектом. Вычисленные ДП, эфемеридные данные, временные поправки и сетка ионосферных поправок по линиям связи передаются на "мастер"-станцию для всех наблюдаемых НКА со всех опорных станций. "Мастер"-станция передает полученную информацию на геостационарный спутник. Геостационарный спутник переизлучает эти параметры объекту-потребителю, приемники которого принимают информацию с геостационарного спутника и HC от каждого наблюдаемого НКА на частоте L1. Объект-потребитель вычисляет свое местоположение, основанное на принятом навигационном сигнале и дифференциальных поправках, полученных через геостационарный спутник.
Каждая опорная станция включает антенну и приемник навигационного сигнала от НКА (GPS), датчик метеорологических параметров, вычислительный процессор и линию передачи данных.
Антенна и приемник навигационного сигнала опорной станции принимают сигнал от НКА и формируют в цифровой форме информацию для основного процессора, выполняющего действия по сглаживанию вычисленных значений псевдодальности, формированию навигационных данных, тропосферных поправок по распространению навигационного сигнала, остаточную дальность между НКА и опорной станцией, показания часов, а также точно определенное местоположение опорной станции.
Для каждого наблюдаемого НКА опорная станция вычисляет псевдодальность на частотах L1 и L2. Это позволяет определить ионосферную задержку и уточнить полученное значение псевдодальности, которое вводится в блок определения измеренной псевдодальности. Приемник навигационного сигнала дешифрирует навигационные данные, переданные каждым наблюдаемым НКА, которые поступают в навигационный вычислитель, формирующий эфемеридную информацию и разность отставания бортовых часов и часов опорной станции, а полученные результаты вводятся в блок определения остаточной дальности. Туда же заводятся поправки к определению псевдодальности, обусловленные влиянием тропосферы. В блок вычисления остаточной дальности вводится информация о местоположении опорной станции. После соответствующей процедуры обработки полученных данных блок вычисления остаточной дальности формирует для внешнего интерфейса опорной станции значение остаточной дальности между опорной станцией и НКА, координаты местоположения опорной станции и ионосферную поправку на время распространения навигационного сигнала.
В качестве линий связи могут быть использованы телефонные линии связи, оптические и оптико-волоконные линии и иные способы приемо-передачи. Терминалом линии связи является "мастер"-станция, которая осуществляет опрос опорных станций, формирование полученной информации и передачу ее через геостационарный спутник объекту-потребителю.
Аппаратура объекта-потребителя включает приемник корректирующих сообщений, общепринятый приемник, работающий на частоте L1 HC от НКА системы GPS, процессор и дисплей. Процессор состоит из основного процессора, который использует декодированные корректирующие сообщения, скорректированную псевдодальность, ионосферную и тропосферную поправки, введенные в память процессора. Кроме того, приемник корректирующих сообщений и приемник навигационного сигнала могут быть объединены как единый прибор для приема, как корректирующего сообщения, так и навигационного сигнала.
При приеме навигационного сигнала от каждого из НКА приемник формирует значения псевдодальности местоположения объекта, а также направления линии визирования между объектом-потребителем и НКА. Полученные результаты вводятся соответственно в вычислитель псевдодальности, в вычислитель тропосферной коррекции и в вычислитель коррекции псевдодальности.
Корректирующие сигналы, переданные "мастер"-станцией, дешифрируются и передаются в вычислитель ионосферной коррекции, формирующий поправки времени распространения для каждого из наблюдаемых НКА, которые учитываются вычислителем псевдодальности. Учитывая все поправки, вычислитель псевдодальности передает ее окончательное значение вычислителю местоположения объекта- пользователя, которое отображается на экране дисплея.
Основной недостаток аналога состоит в неодинаковой точности дифференциальных поправок, обеспечиваемых в обслуживаемом регионе.
Сущность изобретения
Техническим результатом, достигаемым изобретением, является повышение точности и надежности определения местоположения радионавигационной аппаратуры потребителя, работающей в режиме дифференциальных поправок, за счет использования дополнительной избыточности, полученной при использовании наземной навигационной аппаратуры (ННА). При этом требуемая точность и надежность при определении местоположения радионавигационной аппаратурой потребителя сохраняется при ухудшении геометрического фактора орбитальных группировок ГЛОНАС и GPS.
Указанный технический результат достигается тем, что в отличие от прототипа, в систему вводится геодезически обеспеченная радионавигационная точка (точки), а именно ННА, излучающая одновременно сигнал, аналогичный HC НКА, в состав которого входит ДП, вычисленная ККС.
Используя в качестве критерия взвешенный коэффициент геометрии (WDOP) представляющий собой
WDOP=(2Kг.в+Kгг•1/3, (1)
где Kг.в и Kгг - соответственно вертикальный и горизонтальный коэффициент геометрии, показано [Navigation (USA), winter, 1986-1987, V 33, N 4, p. 259-283] , что применение ННА, позволяет снизить максимально возможные Kг.в и Kгг для НКА GPS соответственно от 15.6 до 2.26 и от 7.71 до 2.36.
При этом точность определения местоположения аппаратуры потребителя существенно повышается.
Аппаратура потребителя может быть установлена как на воздушных судах, так и наземных объектах, при условии обеспечения на последних приема сигналов ННА.
Исключение влияния при приеме сигналов ННА и HC НКА для аппаратуры потребителя обуславливается частотным разнесением передаваемых сигналов и пространственной селекцией, т.е. за счет приема этих сигналов двумя различными антенно-фидерными устройствами (АФУ).
Система высокоточного определения местоположения для потребителей навигационной информации в режиме дифференциальных поправок имеет санкционированный доступ.
Надежность высокоточных навигационных определений обусловлена контролем целостности навигационных данных; за счет введения интегрального контроля дифференциальных поправок, а также контролем аппаратно-программных средств системы.
Заявленные технические результаты достигаются тем, что в спутниковую радионавигационную систему определения местоположения объекта, содержащую орбитальную группировку космических аппаратов (НКА), аппаратуру "n" потребителей и по крайней мере одно опорное приемное (ОП) устройство, в состав которого входят первое антенно-фидерное устройство (АФУ) и эталонный приемник навигационного сигнала (HC) НКА, в нее введены устройство интегрального контроля (ИК), наземная навигационная аппаратура (ННА) и регистратор данных, а в состав ОП устройства введены первый коммутатор, блок контроля метеоданных, последовательно соединенные формирователь дифференциальной поправки (ДП) и блок шифрования, а также последовательно соединенные второе АФУ, второй коммутатор, управляемый аттенюатор и эталонный приемник сигнала ННА, выход которого соединен с первым входом формирователя ДП, к второму входу которого подключен выход первого АФУ через последовательно соединенные первый коммутатор и эталонный приемник HC НКА, а к третьему входу формирователя ДП подключен выход блока контроля метеоданных, устройство ИК выполнено в виде последовательно соединенных первого АФУ, первого коммутатора, управляемого аттенюатора и контрольного приемника сигнала ННА, последовательно соединенных второго АФУ, второго коммутатора и контрольного приемника HC НКА, выход которого подключен к одному из входов блока обработки навигационных параметров (НП), к двум другим входам которого подключены соответственно первый выход контрольного приемника сигнала ННА и выход блока дешифрования ДП, к входу которого подключен второй выход контрольного приемника сигнала ННА, первый выход которого, выход блока дешифрования ДП и первый выход блока обработки НП подключены к соответствующим входам блока контроля точности ДП, выход которого и второй выход блока обработки НП подключены к соответствующим входам блока контроля целостности данных, первый выход которого соединен с одним из входов блока контроля имитационных параметров (ИП), к другому входу которого подключен первый выход имитатора сигналов, при этом имитатор сигналов формирует сигналы от НКА и ННА, которые соответственно заводятся в первый коммутатор ОП, второй коммутатор ИК, второй коммутатор ОП и первый коммутатор ИК, а выход блока контроля ИП подключен к первому входу блока управления и контроля, ко второму входу которого подключен второй выход блока контроля целостности, а выходы блока управления и контроля подключены соответственно к входу имитатора сигналов, к управляющему входу ННА и к управляющему входу блока шифрования ДП ОП устройства, выход которого соединен с входом ННА, третий выход блока контроля целостности данных подключен к управляющему входу формирователя ДП ОП устройства, к управляющим входам первого и второго коммутаторов ОП устройства и первого и второго коммутаторов устройства ИК подключен соответствующий выход блока управления и контроля, а интерфейс внешних связей соединен с блоком контроля целостности данных и блока управления и контроля, кроме того входы регистратора данных соединены с соответствующими выходами формирователя ДП ОП устройства, блока контроля целостности данных и интерфейса внешних связей.
Эталонный приемник и контрольный приемник дифференциальных поправок могут быть выполнены по известным схемам (например, [Proc. GPS-95, Palmsprings, CA, US, Sept. 12-15, 1995, pp. 835-844; Riley S., Howard V., Aardoom E., Daly P. , Silverstrim P.A combined GPS/GLONASS High Precision Receiver for space applications.])
Перечень иллюстраций
Фиг. 1. Обобщенная структурная схема навигационной системы определения местоположения объекта.
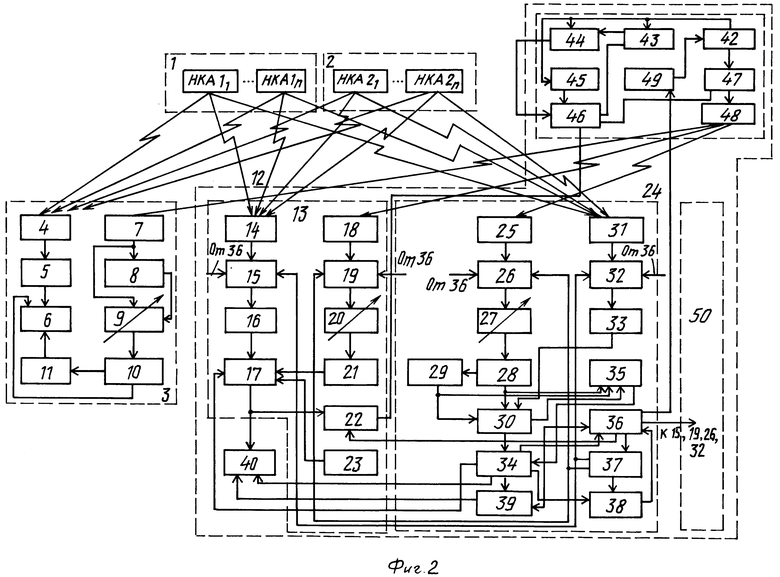
Фиг. 2. Структурная схема высокоточной навигационной системы.
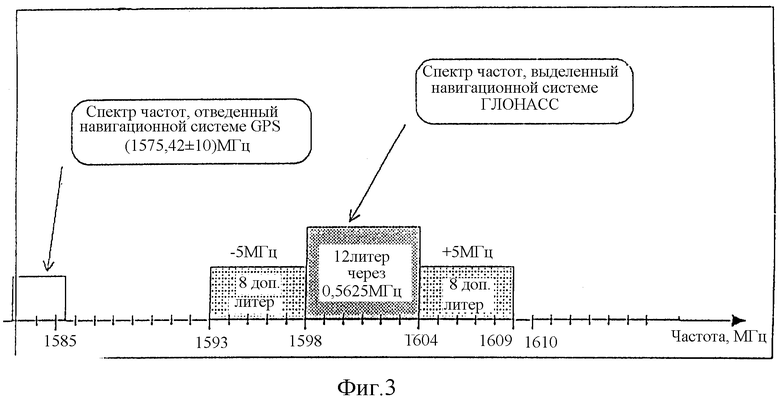
Фиг. 3. Распределение спектрального диапазона для радионавигационных систем.
В состав системы входят:
1 - орбитальная группировка НКА1;
2 - орбитальная группировка НКА 2.
3 - аппаратура потребителя, в состав которой входят:
4 - первое антенно-фидерное устройство (АФУ);
5 - приемник навигационных сигналов (HC) навигационного космического аппарата (НКА);
6 - блок обработки навигационных параметров;
7 - второе АФУ;
8 - измеритель мощности сигнала наземной навигационной аппаратуры (ННА);
9 - управляемый аттенюатор;
10 - приемник сигнала ННА;
11 - блок дешифрования дифференциальных поправок (ДП).
12 - контрольно-корректирующая станция (ККС), в состав которой входят:
13 - опорное приемное (ОП) устройство, в состав которого входит:
14 - первое АФУ;
15 - первый коммутатор;
16 - эталонный приемник навигационных сигналов (HC) НКА;
17 - формирователь дифференциальных поправок (ДП);
18 - второе АФУ;
19 - второй коммутатор;
20 - управляемый аттенюатор;
21 - эталонный приемник сигнала ННА;
22 - блок шифрования ДП;
23 - блок контроля метеоданных (МД);
24 - устройство интегрального контроля (ИК), в состав которого входят:
25 - первое АФУ;
26 - первый коммутатор;
27 - управляемый аттенюатор;
28 - контрольный приемник сигнала ННА;
29 - блок дешифрования ДП;
30 - блок обработки навигационных параметров (НП);
31 - второе АФУ;
32 - второй коммутатор;
33 - контрольный приемник HC НКА;
34 - блок контроля целостности данных;
35 - блок контроля точности ДП;
36 - блок управления и контроля;
37 - имитатор сигналов;
38 - блок контроля имитационных параметров (ИП);
39 - интерфейс внешних связей;
40 - регистратор данных;
41 - наземная навигационная аппаратура, в состав которой входят:
42 - опорный генератор;
43 - формирователь псевдослучайной последовательности (ПСП);
44 - формирователь навигационных данных;
45 - формирователь синхрокоманд;
46 - модулятор;
47 - передатчик;
48 - АФУ;
49 - формирователь литерных частот;
50 - резервирующая аппаратура (горячий резерв ККС).
Сведения, подтверждающие возможность осуществления изобретения
Возможность осуществления изобретения подтверждается ниже следующим описанием работы системы высокоточного определения местоположения объектов-потребителей навигационной информации.
Взаимодействие орбитальной группировки НКА 1 и НКА 2, контрольно-корректирующей станции и аппаратуры потребителя осуществляется следующим образом (Фиг. 1).
Работа системы высокоточного определения местоположения объектов-потребителей навигационной информации может осуществляться в следующих режимах:
-режим санкционированного доступа к режиму дифференциальных поправок объектам-потребителям представляется только в случае, если на объекте-потребителе установлена соответствующая аппаратура; остальные объекты-потребители определяют свое местоположение в штатном режиме;
-режим несанкционированного доступа - прием дифференциальных поправок доступен любому из объектов-потребителей, находящихся в зоне действия ККС.
Выбор режима работы системы определяется по внешней команде. Навигационный сигнал, излучаемый каждым из наблюдаемых НКА орбитальных группировок НКА 1 и НКА 2, принимается одновременно АФУ 4 аппаратуры потребителя 3, первым АФУ 14 опорного приемного устройства 13 и АФУ 31 устройства ИК 24 ККС 12. Для обеспечения избыточности навигационной информации, при ухудшении геометрического фактора наблюдаемых НКА, при обеспечении требуемой точности местоопределения аппаратуры потребителя 3 не хуже заданной, в состав ККС 12 включена геодезически обеспеченная радионавигационная точка, снабженная наземной навигационной аппаратурой (ННА) 41, передающая сигнал аналогичный HC НКА. ННА 41 может территориально располагаться либо рядом с опорным приемным устройством 13 и устройством ИК 24, либо на некотором расстоянии от них. Сигнал ННА 41 излучается в верхнюю полусферу окружающего пространства.
Приняв и обработав HC от НКА и сигнал ННА, опорное приемное устройство 13 решает навигационную задачу и определяет численное значение дифференциальной поправки, которое шифруется или не шифруется в зависимости от режима работы ККС 12 (соответственно режим санкционированного или несанкционированного доступа). Далее сообщение о дифференциальной поправке передается аппаратуре ННА 41, которая излучает его в составе своего сигнала.
Сообщение о значении ДП принимается аппаратурой потребителя 3 и устройством интегрального контроля 24 на предмет контроля правильности переданных значений ДП.
Таким образом, аппаратура потребителя 3, включая дешифрование сообщений о ДП, имеет санкционированный доступ к высокоточной навигационной системе местоопределения, а при отсутствии блока дешифрирования ДП 11 аппаратура потребителя 3 будет навигационно определяться в штатном режиме.
В том случае, если сигнал о ДП не шифруется, объекты-потребители навигационной информации имеют доступ к ДП (режим несанкционированного доступа).
Контрольно-корректирующая станция (ККС) 12 функционально подразделяется на составные части, основное назначение которых заключается в следующем (Фиг. 2):
- опорное приемное устройство 13 определяет истинное значение дифференциальных поправок и передает ННА 41 информацию о дифференциальных поправках для аппаратуры потребителей 3;
- устройство интегрального контроля (ИК) 24 контролирует прохождение через эфир HC наблюдаемых НКА и сигнала ННА 41, проверяет точность переданного значения ДП путем решения задачи местоположения ККС 12 с учетом принятой ДП и последующим сравнением с известными координатами ККС 12, кроме того, осуществляет управление режимами работы ККС 12 и проводит ее тестирование с помощью имитатора сигналов 37. Устройство ИК 24 осуществляет связующую функцию с внешними терминалами для передачи и приема от них служебной информации;
- наземная навигационная аппаратура ННА 41 - геодезически обеспеченная радионавигационная точка, в которой размещена аппаратура радионавигационного обеспечения, передающая сигнал, аналогичный HC НКА, в который дополнительно включена информация о значении ДП; характер сообщения о ДП определяет возможность санкционированного или несанкционированного доступа к высокоточному режиму местоопределения объектом-потребителем;
- регистратор данных 40 регистрирует и хранит основные параметры работы контрольно-корректирующей станции 12;
- резервирующая аппаратура 50 резервирует полный комплект контрольно-корректирующей станции 12 в "горячем" состоянии;
Вышеперечисленные составные части контрольно-корректирующей станции взаимодействуют между собой следующим образом.
Навигационный сигнал НКА принимается первым АФУ 14 ОП устройства 13 и далее в аналоговой форме через первый коммутатор 15 поступает на эталонный приемник HC НКА 16, где он формируется к виду, удобному для аналого-цифрового преобразования и последующему извлечению навигационных параметров, заложенных в HC.
Сигнал, передаваемый ННА 41 принимается вторым АФУ 18 ОП устройства 13 и затем в аналоговой форме поступает на второй коммутатор 19, и далее заводится на управляемый аттенюатор 20, уровень ослабления которого определяется дальностью до ННА 41. С выхода управляемого аттенюатора 20 сигнал подается на эталонный приемник сигнала ННА 21, где он формируется к виду, удобному для аналогово-цифрового преобразования и извлечению навигационных параметров, заложенных в сигнале ННА.
Полученные навигационные параметры о каждом из наблюдаемых НКА 1, 2 и ННА 41 передаются в формирователь ДП 17, где после решения навигационной задачи вычисляется значение ДП на данный момент времени. Процедура определения ДП сводится к следующему. Измерив навигационные параметры в эталонном приемнике HC НКА 16 и эталоном приемнике сигналов ННА 21 и, передав их в формирователь ДП 17, в нем вычисляются корректирующие поправки к навигационным параметрам, определяемым потребителем. Соотношения для вычисления поправок имеют вид (2):
в навигационный параметр аппаратуры потребителя
ΔR0 = Rвыч-Rизм (2)
где Rизм - измеренная псевдодальность между ККС 12 и НКА или ННА;
Rвыч - псевдодальность, вычисленная между ККС 12 и НКА, ННА по транслируемым координатам НКА, ННА и эталонным координатам ККС 12. Значение ДП передается в блок шифровки ДП 22 ОП устройства 13.
Блок контроля МД 23 измеряет параметры внешней окружающей среды (температуру, давление, скорость и направление ветра, влажность) и, обрабатывая их по специальной методике, вводит в формирователь ДП 17 как дополнительную тропосферную поправку псевдодальности.
Устройство ИК 24 имеет два канала приема. По одному из каналов принимается навигационный сигнал от НКА, в состав которого входят последовательно соединенные второе АФУ 31, второй коммутатор 32 и контрольный приемник навигационных сигналов НКА 33. Результаты измерений, произведенных по этому каналу, транслируются в блок обработки навигационных параметров 30. Другой канал устройства ИК 24 принимает сигнал, переданный ННА 41. Этот сигнал через первое АФУ 25, первый коммутатор 26 и управляемый аттенюатор 27 заводится на контрольный приемник сигнала ННА 28, где осуществляется преобразование аналог-цифра и формируются навигационные данные о ННА и ДП. В том случае если работа происходит в режиме санкционированного доступа, то сообщение от ННА 41 разделяется на две части, первая из которых, касающаяся навигационных параметров, заводится в блок обработки навигационных параметров 30, а вторая часть, касающаяся передаваемой ДП, дешифрируется в блоке дешифрирования ДП 29 и далее поступает в блок обработки навигационных параметров 30.
В том случае, если работа происходит в режиме несанкционированного доступа и в дешифровании нет надобности, все сообщения ННА 41 передается непосредственно в блок обработки навигационных параметров 30.
То есть в блоке обработки навигационных параметров 30 собрана информация о навигационных параметрах ННА 41, НКА 1,2 и переданных дифференциальных поправках, и решается навигационная задача местоопределения ККС 12 с учетом всей совокупности полученной навигационной информации. Блок обработки навигационных параметров выполняется по известным схемам и алгоритмам работы [например, заявка WO 91/11732 от 08.08.89 (G 01 S 5/14 А1)] при условии определенной модификации для учета ДП.
Далее полученные результаты транслируются в блок контроля целостности данных 34. Под понятием целостности данных при использовании спутниковой радионавигационной системы в качестве единственного (основного) навигационного средства понимается способность навигационной системы исключить неверную спутниковую информацию, а следовательно, и конкретные значения дифференциальных поправок из последующей обработки до того, как ошибка в выходных параметрах превысит заданный порог [Report of RTCA Special Committee - 159 on Minimum Aviation System Performance Standarts (MASPS) for Global Positioning]. Иными словами, это такое состояние радионавигационных параметров, определяемых по сигналам НКА и ДП, переданных объекту-потребителю, которое ухудшает точность определения координат и времени объектом-потребителем до значения, превышающего заданный порог ошибки местоположения объекта-потребителя (например, пропадание сигнала от НКА, искаженная структура сигнала, не позволяющая ККС 12 войти в синхронизм с НКА и ННА; наличие в навигационном сообщении НКА признака запрета на использование информации от данного НКА, а также сдвиг Бортовой Шкалы Времени (БШВ), дрейф частоты опорного генератора НКА; сход НКА с орбиты; неверная эфемеридная информация и т.п.)
Таким образом, блок контроля целостности данных 34 извлекает из навигационного сообщения блока обработки навигационных параметров 30 информацию о работоспособности НКА, либо может получить аналогичную или иного рода информацию через интерфейс внешних связей 39. Кроме того, этот блок 39 обеспечивает непрерывность слежения за всеми наблюдаемыми НКА орбитальных группировок 1, 2 (ГЛОНАС и GPS), о чем формирует сообщение в формирователь ДП 17 для объекта-потребителя и блока управления и контроля 36. Блок контроля целостности данных 34 функционирует следующим образом. Блок обработки навигационных параметров 30 формирует для блока контроля целостности данных 34 сообщение, которое включает в себя:
- эфемеридные данные, принятые от наблюдаемых НКА и ННА;
- признаки запрета на использование навигационной информации от того или иного НКА или ННА;
- поправку на уход частоты опорного генератора НКА или ННА;
- результаты измерений псевдодальности, проведенных по наблюдаемым НКА и ННА;
Алгоритм работы блока контроля целостности данных 34 по наблюдаемым НКА и ННА состоит в следующем: принятое сообщение из блока 30 сравнивается с аналогичной информацией, заложенной в памяти блока 34, в результате чего выявляются различия в принимаемых сообщениях от НКА и ННА от их истинного состояния. Если полученные различия превышают заданное значение, то формируется команда об исключении из наблюдаемого созвездия того НКА, по которому зафиксировано отклонение параметров выше нормы. В этом случае формируется команда в блок формирования ДП 17 на исключение данного НКА или ННА из числа наблюдаемых при вычислении ДП. Параллельно с вышеозначенной процедурой в блок 34 из блока контроля точности ДП 35 выдается сообщение о правильности вычисленного значения ДП. По совокупности результатов сравнения на соответствие принятых параметров с полученными в результате измерений в блоке управления и контроля 36 принимается решение о возможных в дальнейшем вариантах работы ККС 12:
- прерывание процесса вычислений в блоке 17;
- проведение тестирования аппаратуры ККС 12;
- переход ККС 12 на горячий резерв 50;
В случае работы ККС 12 в режиме тестирования, когда вместо HC НКА используется имитатор сигналов 37 НКА и ННА. В этом случае вся информация блока 34 адресуется блоку контроля имитационных параметров 38, где принимается решение о результатах тестирования программно-аппаратных средств ККС 12, а далее в блоке 36 по результатам тестирования принимается решение о возможных вариантах работы ККС 12. Функциональные связи блока 34 с интерфейсом внешних связей 39, а также регистратором данных 40 показаны выше. Аппаратура блока контроля целостности данных 34 может быть реализована на элементной базе импульсно-цифровой техники (Примеры и аналогии построения приведены, например в [Проектирование специализированных информационно-вычислительных систем: учебное пособие/ под редакцией Ю.М. Смирнова. - Высшая школа 1984]).
Далее, с учетом оценки точности ДП, блок контроля целостности данных 34 формирует сообщение о нормальной работе ККС 12 или о выходе рабочих параметров ККС 12 за пределы допустимых ошибок. Это сообщение адресуется в блок управления и контроля 36. Блок контроля точности ДП 35 на основании вычисленного местоопределения в блоке обработки НП 30, полученного значения дифференциальных поправок и значения точного местоположения устройства ИК 24 вычисляет ошибку между истинным значением местоположения устройства ИК 24 и местоопределения полученного в результате решения навигационного определения по НКА и ННА, с учетом принятой ДП, которая не должна превысить заданного значения.
Следовательно, устройство интегрального контроля 24 решает обратную задачу, что следует из соотношения (3).
RИК = RИЗМ-ΔR0 (3),
где RИЗМ, R0 - см. выражение (2).
Функция контроля точности ДП сводится к вычислению следующих соотношений (4):
где  ошибка в определении измеренных координат устройства ИК 23 с учетом дифференциальных поправок.
ошибка в определении измеренных координат устройства ИК 23 с учетом дифференциальных поправок.
 - вектор положения координат ККС 12, вычисленный по транслируемым координатам НКА и ННА;
- вектор положения координат ККС 12, вычисленный по транслируемым координатам НКА и ННА; - эталонные координаты ККС 12.
- эталонные координаты ККС 12.
Полученные результаты передаются в блок контроля целостности данных 34, где происходит операция проверки на превышение заданного порога погрешности ε в определении координат.
Блок управления и контроля 36 выполняет функции управления ККС 12, которые включают в себя следующее:
- введение ККС 12 в рабочее состояние;
- контроль за состоянием аппаратуры отдельных узлов и блоков;
- управление литерными частотами излучения ННА и синхронизация БШВ НКА и ННА 41;
- управление режимом санкционированного или несанкционированного доступа;
- управление уровнем ослабления управляемых аттенюаторов 20 и 27;
- переключение резервного комплекта аппаратуры в случае выхода из строя отдельных узлов и блоков;
- управление обменом информации через интерфейс внешний связей 39 и т.д. ;
Блок управления и контроля 36 функционирует следующим образом. Блок 36 функционально связан с блоком контроля целостности данных 34, интерфейсом внешних данных 39 для передачи принятых от внешних источников об особых условиях работы или иной информации. Функциональная связь с имитатором сигналов 37 НКА и ННА, а также и коммутаторами, обусловлена необходимостью включения режима тестирования каналов приема. Функциональная связь с ННА 41, блок управления формирователем дополнительных литерных частот 49, предназначена для задания той или иной дополнительной несущей частоты сигнала ННА и синхронизации БШВ НКА и ННА 41.
В этой связи необходимо отметить следующее.
Поскольку ННА 41 располагается на небольших расстояниях от ККС или вместе с ККС, шкала времени ККС и ННА связываются между собой с высокой точностью. Следовательно, при учете ДП аппаратурой потребителя шкала времени аппаратуры потребителя также оказывается привязанной к шкале времени ККС, а сигналы ННА являются источником информации о взаимной дальности и скорости между аппаратурой потребителя и ККС.
Алгоритм функционирования блока контроля и управления состоит в следующем. По команде, поданной через интерфейс внешних связей 39 (или команде оператора ККС 12), блок 36 по определенной программе осуществляет подачу питающих напряжений на функциональные блоки ККС 12 и контролирует их наличие.
После этого в зависимости от режима работы (работа от имитатора сигналов 37 или рабочий сеанс) производится установка положения коммутаторов и осуществляется контроль за их положением.
Далее по команде оператора для рабочего режима на блоке 49 ННА 41 осуществляется выбор дополнительной литерной частоты ННА.
Затем формируется (по внешней команде или команде оператора) сигнал управления на блок шифрования ДП 22 определяющий работу в режиме санкционированного или несанкционированного доступа, а далее по результатам, формируемым блоком целостности данных 34, принимается решение о дальнейших вариантах работы ККС 12, о чем было сказано выше.
Аппаратура реализуется на элементной базе импульсно-цифровой техники (Примеры и аналогии построения приведены, например в [Проектирование специализированных информационно-вычислительных систем: учебное пособие/ под редакцией Ю.М. Смирнова. - Высшая школа, 1984г.]).
Интерфейс внешних связей 39 выполняет связующую роль с внешними источниками сообщений (например, обмен информацией с другими ККС; прием, передача сообщений об отказах НКА; прием сообщений об особых режимах работы ККС 12);
Для проверки работоспособности контрольно-корректирующей станции 12 в устройство ИК 24 включен имитатор навигационных сигналов 37, который формирует HC от НКА и сигналы ННА, эти сигналы соответственно заводятся через коммутаторы 15, 32 и коммутаторы 19, 26 заводятся в соответствующие приемники 16, 33 и 21, 28. Управление коммутаторами 15, 32, 19, 26 осуществляет блок управления и контроля 36. Таким образом, используя сигналы имитатора 37, ККС 12 проводит "мнимый" рабочий цикл, т. е. по заранее известным HC и сигналам ННА формируется ДП, после чего осуществляется контроль целостности данных, откуда формируется сообщение о численном значении полученных ошибок местоопределения, которое передается в блок контроля имитационных параметров 38, где происходит сравнение исходной ошибки местоопределения ККС, заложенной при формировании HC НКА и сигналам ННА, с полученной ошибкой, и формируется сообщение о выходе или нахождении в заданных пределах полученного значения местоопределения ККС 12;
Это сообщение транслируется в блок управления и контроля 36, который принимает решение о дальнейшем режиме работы ККС 12.
Имитационный контроль осуществляется циклично при штатной работе контрольно-корректирующей станции 12.
В целях архивации основных рабочих параметров в ККС 12 в опорное приемное устройство 13 включен регистратор данных 40, который соединен с функциональными блоками 17, 39 и 34.
ННА 41 входит в состав ККС 12, управление которым осуществляет блок управления и контроля 36. Для уменьшения взаимного влияния сигналов НКА и ННА частотный интервал работы ННА сдвигается выше по частоте по отношению к основному рабочему диапазону ГЛОНАСС, т.е. в интервале частот 1604 - 1609 МГц (Фиг. 3).
Информационное сообщение ННА 41 формируется аналогично информационному сообщению НКА, с той разницей, что в резервной строке суперкадра передается дифференциальная поправка.
Сообщение о назначенной частоте излучения ННА 41 и БШВ НКА поступает из блока управления и контроля 36 устройства ИК 24 в блок управления формирования литерных частот 49, который управляет работой опорного генератора 42. Опорный генератор 42 синхронизирует работу функциональных узлов и блоков ННА 41.
Взаимодействие отдельных блоков и узлов, за исключением связи с блоком шифрования ДП 22 ОН устройства 13, оговорено в заявке [WO 91/11732 от 08.08.91 (GO1S/14AI)].
Блок шифрования ДП 22 предназначен для кодирования криптошифром сообщения о ДП, получаемом от формирователя ДП 17 опорного приемного устройства 13, после кодирования сообщение о ДП передается в модулятор 46, который определяет место передаваемой ДП в сообщении (суперкадре), передаваемом ННА 41.
В том случае, если режим работы высокоточной навигационной системы определен как несанкционированный, то отличие от режима с санкционированным доступом состоит лишь в том, что блок шифрования ДП 22 не будет осуществлять криптошифровку ДП, а сразу транслирует их в модулятор 46 ННА 41.
Аппаратура потребителя 3 включает в себя два канала и представляет собой структурно канал приема HC от НКА и сигнала ННА HC от НКА контрольно-корректирующей станцией, HC от НКА принимает АФУ 4 и далее обрабатывается приемником HC НКА 5, где определяются параметры, необходимые для решения навигационной задачи и затем передаются в блок обработки навигационных параметров 6.
АФУ 7 принимает сигнал ННА 41. В силу того, что аппаратура потребителя может быть мобильной, динамический диапазон изменения мощности сигнала значителен, поэтому в канале приема сигнала ННА включен аттенюатор 8, уровнем ослабления которого управляет измеритель мощности сигнала 8. Ослабленный сигнал поступает в приемник сигнала ННА 10, где формируются навигационные параметры ННА и выделяются дифференциальные поправки, определенные опорным приемным устройством 13. В том случае, если работа происходит в режиме санкционированного доступа, то сообщение от ННА 41 разделяется на две части, первая из которых, касающаяся навигационных параметров, заводится в блок обработки навигационных параметров 6, а вторая часть, касающаяся передаваемой ДП, дешифрируется в блоке дешифрации ДП 11 и далее передается в блок обработки навигационных параметров 6.
В том случае, если работа происходит в режиме несанкционированного доступа, т.е. когда сообщение о ДП передается в обычном стандарте и в дешифрации нет надобности, все сообщение ННА 41 передается непосредственно в блок обработки навигационных параметров.
Далее в блоке обработки навигационных параметров 6 после решения навигационной задачи осуществляется местоопределение объекта-потребителя.
Для специалистов в указанной области и других областей при ознакомлении с настоящим описанием будут ясны другие возможные модификации данного изобретения. Такие модификации могут включать другие известные по предшествующему уровню техники признаки конструкций. Описанный выше вариант системы не исчерпывает все их многообразие, которое можно осуществить в соответствии с нижеследующей формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА | 1999 |
|
RU2152050C1 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2184381C1 |
| СПОСОБ ВЫДЕЛЕНИЯ ПОГРЕШНОСТЕЙ В СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМАХ | 2000 |
|
RU2175771C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ТОПОПРИВЯЗЧИКА В РЕЖИМЕ КОНТРОЛЬНО-КОРРЕКТИРУЮЩЕЙ СТАНЦИИ | 2012 |
|
RU2498223C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНЫХ КООРДИНАТ ОБЪЕКТА С ПРИВЯЗКОЙ К ПРОИЗВОЛЬНОЙ ТОЧКЕ ПРОСТРАНСТВА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2253128C1 |
| СПОСОБ ТОЧНОГО ПОЗИЦИОНИРОВАНИЯ И МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ | 2004 |
|
RU2248005C1 |
| Способ определения местоположения абонентских терминалов, перемещающихся в зоне покрытия локальной системы навигации | 2023 |
|
RU2825248C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ-ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2402786C1 |
| СПОСОБ ДИФФЕРЕНЦИАЛЬНОЙ НАВИГАЦИИ | 1999 |
|
RU2155969C1 |
| СПОСОБ ФОРМИРОВАНИЯ НАВИГАЦИОННЫХ РАДИОСИГНАЛОВ НАВИГАЦИОННЫХ КОСМИЧЕСКИХ АППАРАТОВ (НКА) НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ (ГСО) И/ИЛИ НАВИГАЦИОННЫХ КОСМИЧЕСКИХ АППАРАТОВ (НКА) НА ГЕОСИНХРОННОЙ НАКЛОННОЙ ОРБИТЕ (ГСНО) С ПОМОЩЬЮ ЗЕМНЫХ СТАНЦИЙ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2474845C1 |
Предлагаемое изобретение относится к радионавигационным системам определения местоположения аппаратуры потребителей, использующих режим дифференциальных поправок в навигационном поле систем ГЛОНАС/GPS и доуточнения этого навигационного поля, в особых случаях, посредством дополнения его необходимым количеством геодезически обеспеченных радионавигационных точек, что повышает надежность и точность навигационного обеспечения аппаратуры потребителя навигационной информации. Техническим результатом, достигаемым изобретением, является повышение точности и надежности определения местоположения радионавигационной аппаратуры потребителя, работающей в режиме дифференциальных поправок, за счет использования дополнительной избыточности, полученной при использовании наземной навигационной аппаратуры (ННА). При этом требуемая точность и надежность при определении местоположения радионавигационной аппаратурой потребителя сохраняется при ухудшении геометрического фактора орбитальных группировок ГЛОНАС и GPS. Указанный технический результат достигается тем, что в отличие от прототипа в систему вводится геодезически обеспеченная радионавигационная точка (точки), а именно ННА, излучающая одновременно сигнал, аналогичный НС НКА, в состав которого входит ДП, вычисленная ККС. В этом случае взвешенный коэффициент геометрии (WDOP) уменьшается, что позволяет повысить определение местоположения аппаратуры потребителя. Аппаратура потребителя может быть установлена как на воздушных судах, так и наземных объектах, при условии обеспечения на последних приема сигналов ННА. Исключением влияния при приеме сигналов ННА и НС НКА для аппаратуры потребителя обуславливается частотным разнесением передаваемых сигналов и пространственной селекцией, т.е. за счет приема этих сигналов двумя различными антенно-фидерными устройствами (АФУ). Система высокоточного определения местоположения для потребителей навигационной информации в режиме дифференциальных поправок имеет санкционированный доступ. Надежность высокоточных навигационных определений обусловлена контролем целостности навигационных данных за счет введения интегрального контроля дифференциальных поправок, а также контролем аппаратно-программных средств системы. 3 ил., 1 табл.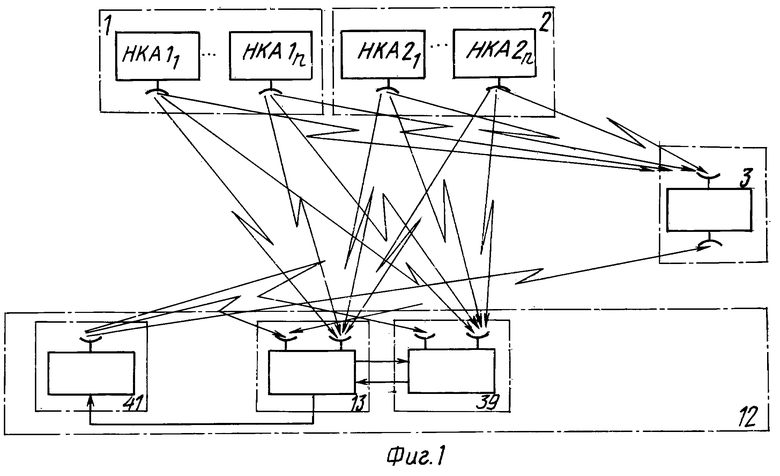
Спутниковая радионавигационная система определения местоположения объекта, содержащая орбитальную группировку навигационных космических аппаратов (НКА), аппаратуру n потребителей и, по крайней мере, одно опорное приемное (ОП) устройство, в состав которого входят первое антенно-фидерное устройство (АФУ) и эталонный приемник навигационного сигнала (НС) НКА, отличающаяся тем, что в нее введены устройство интегрального контроля (ИК), наземная навигационная аппаратура (ННА) и регистратор данных, а в состав ОП устройства введены первый коммутатор, блок контроля метеоданных, последовательно соединенные формирователь дифференциальной поправки (ДП) и блок шифрования, а также последовательно соединенные вторые АФУ, второй коммутатор, управляемый аттенюатор и эталонный приемник сигнала ННА, выход которого соединен с первым входом формирователя ДП, ко второму входу которого подключен выход первого АФУ через последовательно соединенные первый коммутатор и эталонный приемник НС НКА, а к третьему входу формирователя ДП подключен выход блока контроля метеоданных, устройство ИК выполнено в виде последовательно соединенных первого АФУ, первого коммутатора, управляемого аттенюатора и контрольного приемника сигнала ННА, последовательно соединенных второго АФУ, второго коммутатора и контрольного приемника НС НКА, выход которого подключен к одному из входов блока обработки навигационных параметров (НП), к двум другим входам которого подключены соответственно первый выход контрольного приемника сигнала ННА и выход блока дешифрования ДП, к входу которого подключен второй выход контрольного приемника сигнала ННА, первый выход которого, выход блока дешифрования ДП и первый выход блока обработки НП подключены к соответствующим входам блока контроля точности ДП, выход которого и второй выход блока обработки НП подключены к соответствующим входам блока контроля целостности данных, первый выход которого соединен с одним из входов блока контроля имитационных параметров (ИП), к другому входу которого подключен первый выход имитатора сигналов, при этом имитатор сигналов формирует сигналы от НКА и ННА, которые соответственно заводятся в первый коммутатор ОП, второй коммутатор ИК, второй коммутатор ОП и первый коммутатор ИК, а выход блока контроля ИП подключен к первому входу блока управления и контроля, ко второму входу которого подключен второй выход блока контроля целостности, а выходы блока управления и контроля подключены соответственно к входу имитатора сигналов, к управляющему входу ННА и к управляющему входу блока шифрования ДП ОП устройства, выход которого соединен с входом ННА, третий выход блока контроля целостности данных подключен к управляющему входу формирователя ДП ОП устройства, к управляющим входам первого и второго коммутаторов ОП устройства и первого и второго коммутаторов устройства ИК подключен соответствующий выход блока управления и контроля, а интерфейс внешних связей соединен с блоком контроля целостности данных и блока управления и контроля, кроме того, входы регистратора данных соединены с соответствующими выходами формирователя ДП ОП устройства, блока контроля целостности данных и интерфейса внешних связей устройства ИК.
| Огнетушитель | 0 |
|
SU91A1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВЫСОКОТОЧНОГО ОТНОСИТЕЛЬНОГО МЕСТОПОЛОЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА ПО СИГНАЛАМ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1998 |
|
RU2143123C1 |
| МНОГОКАНАЛЬНЫЙ ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2079148C1 |
| ПРИЕМНИК АППАРАТУРЫ ПОТРЕБИТЕЛЕЙ СИГНАЛОВ ГЛОБАЛЬНЫХ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1996 |
|
RU2100821C1 |
| RU 21046378 С1, 10.03.2000 | |||
| Способ получения 2-гуанидинилиденовых производных 3-метилтиазолидина в виде их аддитивных солей с кислотами | 1980 |
|
SU978728A3 |
| WO 00/14571 А1, 16.03.2000 | |||
| WO 00/16120 А1, 23.03.2000. | |||

