Настоящее изобретение относится к групповым устройствам управления электродвигателями переменного тока и, в частности, к частотно-регулируемому электроприводу групп асинхронных двигателей общего применения.
Станция автоматического управления частотно-регулируемого электропривода переменного тока находит широкое применение в коммунальном хозяйстве на центральных тепловых пунктах (ЦТП) в системах горячего и холодного водоснабжения жилых домов, насосные агрегаты которых работают в широком диапазоне изменения технологического параметра (давления воды). В большинстве случаев ЦТП работают в автономном режиме с периодическим посещением обслуживающим персоналом. Обычно на ЦТП используются несколько насосных агрегатов (например три), один из которых является основным, другой - дополнительным, а третий - резервным. Для поддержания выходного технологического параметра на заданном уровне возникает необходимость одновременно с работой основного насосного агрегата подключать дополнительный. Для этого работающий на номинальной скорости вращения двигателя насосный агрегат переключается на питание прямо от сети, а дополнительный агрегат подключается к выходу частотно-регулируемого преобразователя и плавно разгоняется до требуемого уровня, определяемого встроенной системой регулирования. Это позволяет выбирать частотно-регулируемый преобразователь, мощность которого соответствует одному двигателю насосных агрегатов, и исключить пусковые токи двигателей, обеспечивая плавный пуск каждого из них перед подключением его на питание непосредственно от сети.
Уровень техники
Известным техническим решением является частотно-регулируемый преобразователь питания стандартных асинхронных двигателей переменного тока с короткозамкнутым ротором, спроектированным для управления не только одним электродвигателем, но также для управления работой нескольких (от двух до четырех) электродвигателей.
Известные решения частотно-регулируемых электроприводов [1-2] и станции управления [3] , а наиболее близкое по совокупности существенных признаков решение [3] (прототип), содержит частотно- регулируемый преобразователь, вход питания которого соединен с трехфазной силовой сетью, двигатели (например, три), три реверсивных коммутатора, обмотки каждого двигателя подключены соответственно к силовым выходам каждого из трех реверсивных коммутаторов, имеющих два входа, первые входы которых соединены с трехфазной силовой сетью, а вторые входы подключены к выходу частотно-регулируемого преобразователя. Каждый реверсивный коммутатор содержит две обмотки управления, первый вывод которых соединен с общей точкой, второй вывод каждой обмотки управления подсоединен последовательно к первому выводу размыкающих контактов механической блокировки. Вторые выводы контактов механической блокировки подсоединены к выходам управления частотно- регулируемого преобразователя. Информационный вход, датчик технологического параметра соединен с информационным входом частотно-регулируемого преобразователя.
В известных технических решениях станция автоматического управления позволяет использовать только один частотно-регулируемый преобразователь и с его помощью осуществлять плавный пуск двигателя, а при достижении номинальной скорости вращения двигателя переключать двигатель на питание от силовой сети.
Недостатком известных аналогов и прототипа является то, что используется специализированный частотно-регулируемый преобразователь, который одновременно выполняет роль системы управления станции. Выход из строя или отказ в работе частотно- регулируемого преобразователя приводит к отказу всей станции автоматического управления группы двигателей насосных агрегатов. Особенно это опасно при работе в автономном режиме в течение времени отсутствия обслуживающего персонала. Следовательно, указанный выше недостаток проводит к снижению надежности работы и уменьшению функциональных возможностей такой станции управления.
Сущность изобретения
Задача, на решение которой направлено предлагаемое изобретение, состоит в расширении функциональных возможностей, включающие использование штатного частотно-регулируемого преобразователя для обеспечения плавного пуска любого двигателя перед подключением его к силовой сети, а также для поддержания и регулирования технологического параметра и в повышении надежности работы в автономном режиме.
Решение этой задачи достигается тем, что станция автоматического управления частотно-регулируемого электропривода переменного тока, содержащая частотно-регулируемый преобразователь, имеющий информационный и силовой входы и силовой выход, двигатели, реверсивные коммутаторы по числу двигателей, датчик технологического параметра. Каждый реверсивный коммутатор имеет один силовой выход и два силовых входа, две обмотки управления и размыкающие контакты взаимной блокировки. Первый силовой вход реверсивных коммутаторов соединен параллельно с силовым входом частотно-регулируемого преобразователя с трехфазной силовой сетью, второй силовой вход реверсивных коммутаторов соединен с силовым выходом частотно-регулируемого преобразователя, к силовому выходу реверсивных коммутаторов подключены обмотки соответствующих двигателей. Первые выводы обмоток управления реверсивных коммутаторов соединены с общей точкой, вторые выводы обмоток управления реверсивных коммутаторов соединены последовательно с первыми выводами размыкающих контактов взаимной блокировки, отличающийся тем, что дополнительно введены входной преобразователь сигнала датчика технологического параметра во входной сигнал микропроцессорного контроллера, система управления на базе микропроцессорного контроллера, выполненная с возможностью реализации функции определения работоспособности частотно-регулируемого преобразователя и сравнения сигнала с датчика технологического параметра с заданными значениями, а затем по полученным результатам вырабатывает соответствующие сигналы управления, поступающие на информационный вход частотно- регулируемого преобразователя и обмотки управления реверсивных коммутаторов, при работоспособности частотного преобразователя и совпадении значений поддержание производительности производится внутренней системой регулирования частотно-регулируемого преобразователя, при отклонении в меньшую сторону производится наращивание производительности путем последовательного плавного разгона очередного двигателя и подключения его на питание от силовой сети, при отклонении в большую сторону производится снижение производительности последовательным отключением работающих двигателей от силовой сети с плавным торможением одного из них. При неработоспособности частотно-регулируемого преобразователя перечисленные выше действия выполняются без плавного разгона или торможения двигателя, выходной преобразователь сигнала с микропроцессорного контроллера во входной информационный сигнал частотно-регулируемого преобразователя, информационный вход которого соединен через выходной преобразователь с первым выходом микропроцессорного контроллера, к остальным выходам микропроцессорного контроллера подключены вторые выводы размыкающих контактов взаимной блокировки реверсивных коммутаторов, а вход микропроцессорного контроллера через входной преобразователь соединен с датчиком технологического параметра.
Совокупность существенных признаков позволяет расширить функциональные возможности, заключающиеся в том, что поддержание технологического параметра производится двумя параллельными каналами управления: первым каналом, использующим систему управления станции, и вторым каналом, использующим внутреннюю систему регулирования, штатного частотно-регулируемого преобразователя. Оба канала управления работают параллельно и одновременно в силу того, что второй канал управления вложен внутрь первого канала. Пока сигнал с датчика технологического параметра имеет величину, лежащую между минимальным и максимальным значением, то поддержание производится внутренней системой регулирования частотно-регулируемого преобразователя. В крайних точках значений с датчика технологического параметра поддержание производится системой управления станции. Станция автоматического управления включает двигатели насосных агрегатов на питание от силовой сети по входному сигналу с датчика технологического параметра. Наличие отличительных признаков изобретения позволяют повысить надежность работы станции.
На чертеже приведена блок-схема станции автоматического управления частотно-регулируемого электропривода переменного тока.
5. Сведения, подтверждающие возможность осуществления изобретения
Станция автоматического управления частотно-регулируемого электропривода переменного тока содержит (см. фиг.1) частотно- регулируемый преобразователь 1, реверсивные коммутаторы (по числу двигателей) 2, каждый из которых содержит по две обмотки управления 3 и 4. Первый вывод каждой из катушек обмотки управления коммутаторов соединен с общим проводом питания 5.
Двигатели 6, подключенные к соответствующим выходам 7 каждого из трех реверсивных коммутаторов, имеющих по два входа. Первый вход каждого коммутатора 8, второй - 9. Первые входы 8 коммутаторов соединены между собой параллельно и подключены к трехфазной силовой сети 10 с нулевым проводом 11. Одновременно силовая сеть 10 поступает на вход 12 частотно-регулируемого преобразователя 1. Вторые входы 9 коммутаторов, соединенные параллельно между собой, подключены к выходу 13 частотно-регулируемого преобразователя 1.
Первая обмотка управления 3 каждого коммутатора управляет первой группой силовых замыкающих контактов 14 и размыкающим контактом блокировки 15. Первый вывод контакта блокировки 15 подключен ко второму выводу второй обмотки 4 управления каждого коммутатора. Первая группа силовых контактов 14 включена последовательно между выходом 7 и первым входом 8 каждого реверсивного коммутатора. Вторая обмотка 4 управления каждого коммутатора управляет второй группой силовых замыкающих контактов 16 и размыкающих контактов блокировки 17. Первый вывод контакта блокировки 17 подключен ко второму выводу первой обмотки управления 3 каждого коммутатора. Вторая группа силовых контактов 16 включена последовательно между выходом 7 и вторым входом 9 каждого реверсивного коммутатора. Вторые выводы контактов блокировки каждого коммутатора подключены к шести выходам 18-23 блока управления 24.
В состав блока управления входит микроконтроллерная система управления 25, входной преобразователь 26 выходного сигнала 27 датчика технологического параметра 28 во входной сигнал 29 микроконтроллерной системы управления и выходной преобразователь 30 выходного сигнала 31 микроконтроллерной системы управления в информационный сигнал 32. Шесть выходов микроконтроллерного блока управления 24 являются шестью выходами микроконтроллерной системы управления 25.
Станция автоматического управления частотно-регулируемого электропривода переменного тока работает следующим образом.
В исходном состоянии на частотно-регулируемый преобразователь 1 подается трехфазное сетевое питание. Микроконтроллерная система управления определяет конфигурацию системы управления в зависимости - от заданного параметра, от величины сигнала с датчика технологического параметра, от работоспособности частотно-регулируемого преобразователя. Управление частотно-регулируемым преобразователем производится величиной сигнала на его информационном входе 32. При низком уровне сигнала на выходе частотно-регулируемого преобразователя формируется ШИМ с плавным изменением напряжения и частоты от самой минимальной. При среднем уровне сигнала параметры выходного ШИМ сохраняют последнее значение и не изменяются. При высоком уровне сигнала - параметры формируемого ШИМ (напряжение и частота) плавно уменьшается.
В момент включения микроконтроллерная система управления на выходе 32 выходного формирователя 30 вырабатывает высокий уровень сигнала. Одновременно микроконтроллерная система управления вырабатывает сигнал на одном на четных выходов 18, (20,22) блока управления, при этом подается сигнал на обмотку управления 4 одного реверсивного коммутатора 2. Связанные с этой обмоткой силовые контакты 16 соединяют выход 13 частотно-регулируемого преобразователя 1 с одним из двигателей 6.
Далее работа станции автоматического управления возможна в режимах: первый - поддержание технологического параметра с наращиванием производительности насосных агрегатов, второй - поддержание технологического параметра со снижением производительности насосных агрегатов.
При работе микроконтроллерная система управления сравнивает сигнал, поступающий с датчика 28 технологического параметра с заданными значениями и принимает следующие решения в зависимости от результатов сравнения. Если величина сигнала недостаточна то частотно-регулируемый преобразователь плавно разгоняет подключенный двигатель. Одновременно с этим изменяется уровень сигнала с датчика технологического параметра. Если производительности этого двигателя достаточно, то происходит поддержание заданного уровня технологического параметра. Для чего микроконтроллерная система управления формирует на информационном входе частотно-регулируемого преобразователя средний уровень сигнала.
Если же подключенный двигатель насосного агрегата разогнан до номинальной скорости вращения, а сигнал с датчика технологического параметра меньше требуемого значения и держится неизменным в течение некоторого времени, то микроконтроллерная система управления вырабатывает решение: работающий двигатель насосного агрегата переключить на питание прямо от сети и включить для разгона второй двигатель. Для чего на сопряженном нечетном выходе 19,(21, 23) запитывается обмотка 3 реверсивного коммутатора 2. При этом снимается питание со связанной обмоткой управления 4. Связанные силовые контакты 16 отключают двигатель 6 от выхода частотно-регулируемого преобразователя 1, а силовые контакты 14 подключают этот двигатель к силовой сети 10.
Затем микроконтроллерная система управления формирует на выходе выходного формирователя максимальный сигнал. Частотно-регулируемый преобразователь переводится в режим холостого хода, и на выходе плавно уменьшается напряжение и частота.
При достижении минимальных значений ШИМ микроконтроллерная система управления вырабатывает сигнал на следующем очередном четном выходе 20, (18,22), запитывая обмотку управления 4 следующего реверсивного коммутатора 2. Связанные силовые контакты 16 второго реверсивного коммутатора соединяют выход 13 частотно-регулируемого электропривода 1 с очередным двигателем 6. Поддержание выходного технологического параметра производится теперь двумя двигателями, один из которых подключен прямо к силовой сети, а другой - к выходу частотно-регулируемого преобразователя.
При продолжении аналогичной ситуации микроконтроллерная система управления станции произведет переключение работающего в номинальном режиме второго двигателя на питание от силовой сети и подключит для мягкого пуска следующий двигатель к входу частотно-регулируемого преобразователя 1 и так до тех пор, пока все двигатели не будут подключены на питание от силовой сети. Затем частотно-регулируемый преобразователь переводится на работу в режим холостого хода, и на его информационный вход подается максимальный сигнал, его работа тормозится, и на выходе формируются сигналы ШИМ соответствующие минимальному напряжению и частоте.
При работе во втором режиме возможны еще два случая: первый случай, когда не все двигатели, а второй случай когда все двигатели насосных агрегатов подключены на питание от сети. В первом случае, если величина сигнала с датчика технологического параметра превышает величину заданного значения, микроконтроллерная система управления формирует на информационном входе частотно-регулируемого преобразователя максимальный сигнал. Частотно-регулируемый преобразователь плавно тормозит двигатель, подключенный к его выходу. Это приводит к уменьшению производительности и, соответственно, к уменьшению сигнала с датчика технологического параметра. Микроконтроллерная система управления поддерживает уровень технологического параметра.
Если сигнал с датчика технологического параметра остается неизменным и превышает необходимый уровень в течение некоторого времени, микроконтроллерная система управления вырабатывает решение отключить один из работающих двигателей насосных агрегатов от сети, для чего с обмотки управления 3 включенного реверсивного коммутатора одного из двигателей снимается сигнал.
Во втором случае, когда все двигатели подключены на питание от сети - то тогда один из работающих двигателей насосных агрегата отключается от сети и после его торможения подключается к выходу частотно-регулируемого преобразователя 1, для чего с обмотки управления 3 реверсивного коммутатора одного из двигателей снимается сигнал и после торможения двигателя подается на обмотку управления 4 этого реверсивного коммутатора. Силовые контакты 14 отключают выбранный двигатель от силовой сети, а силовые контакты 16 подключают этот двигатель к выходу частотно-регулируемого преобразователя 1. Поддержание выходного технологического параметра производится теперь оставшимися и включеным двигателями насосных агрегатов.
При продолжении ситуации превышения сигнала с датчика технологического параметра микроконтроллерная система управления произведет отключение следующего работающего двигателя от силовой сети, сохраняя включение двигателя на питание от частотно-регулируемого преобразователя. И так до тех пор, пока все двигатели не будут отключены от силовой сети и не останется только один двигатель, подключенный на питание от частотно-регулируемого преобразователя. Поддержание заданного уровня на выходе датчика технологического параметра производится микроконтроллерной системой управления станции.
Если микроконтроллерная система управления будет повторять сигнал с датчика технологического параметра, то функция поддержания уровня технологического параметра может традиционно выполняться встроенной системой управления частотно-регулируемого преобразователя.
В случае отказа в работе частотно-регулируемого преобразователя 1 в зависимости от уровня сигнала с датчика технологического параметра микроконтроллерная система управления (подключает или отключает) двигатели насосных агрегатов на непосредственное питание от силовой сети до момента посещения ЦТП обслуживающим персоналом.
Это позволяет существенно увеличить срок службы и обеспечить повышение надежности работы системы автоматического управления насосных агрегатов.
Источники информации
1. Патент США 4419615 кл. 318/811 от 6.12.1983 г.
2. Привода и управление. Danfoss VLT 3500 HV-AC. Частотные преобразователи. Руководство по эксплуатации. MD.35.В1.50,c.6
3. Станция автоматического управления частотно-регулируемым приводом насосных агрегатов типа СУ-4Э. Энергосбережение. N 3-4, 1998, с.16.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ НАСОСНОЙ СТАНЦИИ | 2013 |
|
RU2551139C1 |
| ПЕРЕДВИЖНАЯ ЭЛЕКТРОСТАНЦИЯ | 2005 |
|
RU2295189C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1998 |
|
RU2136103C1 |
| Станция управления насосной установкой нефтедобывающей скважины (варианты) | 2017 |
|
RU2651651C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ ОТОПИТЕЛЬНОЙ УСТАНОВКИ | 2015 |
|
RU2624723C2 |
| Система регулирования электропривода насосного агрегата и способ работы системы | 2018 |
|
RU2687175C1 |
| Стенд универсальный автоматизированный энергосберегающий | 2024 |
|
RU2840012C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОПЕРЕКАЧИВАЮЩИМ АГРЕГАТОМ "КВАНТ-Р" | 2017 |
|
RU2660216C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ РЕЖИМА РАБОТЫ СКВАЖИНЫ, ОБОРУДОВАННОЙ ПОГРУЖНЫМ ЦЕНТРОБЕЖНЫМ ЭЛЕКТРОНАСОСОМ | 1997 |
|
RU2140523C1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД С ЭКСТРЕМАЛЬНЫМ РЕЖИМОМ РАБОТЫ | 2013 |
|
RU2540319C2 |
Изобретение относится к силовым преобразователям напряжения и частоты, используемым для управления работой двигателей переменного тока с короткозамкнутым ротором общего применения. Технический результат заключается в повышении надежности работы станции частотно-регулируемого электропривода и снижении себестоимости изделия. Станция автоматического управления частотно-регулируемого электропривода переменного тока содержит частотно-регулируемый преобразователь, реверсивные коммутаторы по числу используемых двигателей с обмотками управления, включенными последовательно с размыкающими контактами блокировки, датчик технологического параметра, двигатели, подключенные к выходам реверсивных коммутаторов, имеющих два входа, первые из которых соединены с трехфазной силовой сетью, а вторые входы подключены к выходу частотно-регулируемого преобразователя, микроконтроллерную систему управления, имеющую вход, соединенный с датчиком технологического параметра, и несколько выходов, первый из которых соединен с информационным входом частотно-регулируемого преобразователя, а к остальным выходам подключены обмотки управления реверсивных коммутаторов. 1 ил.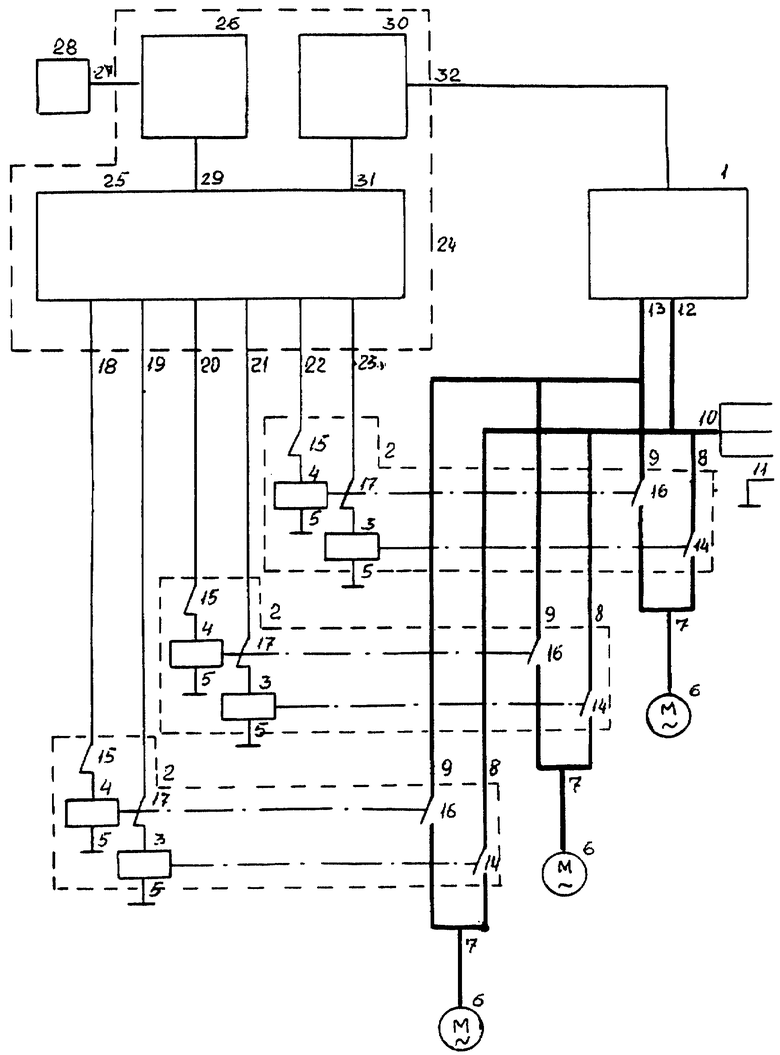
Станция автоматического управления частотно-регулируемого электропривода переменного тока, содержащая частотно-регулируемый преобразователь, имеющий информационный и силовой входы и силовой выход, двигатели, реверсивные коммутаторы по числу двигателей, датчик технологического параметра, каждый реверсивный коммутатор имеет один силовой выход и два силовых входа, две обмотки управления и размыкающие контакты взаимной блокировки, первый силовой вход реверсивных коммутаторов соединен с силовым входом частотно-регулируемого преобразователя с трехфазной силовой сетью, второй силовой вход реверсивных коммутаторов соединен с силовым выходом частотно-регулируемого преобразователя, к силовому выходу реверсивных коммутаторов подключены обмотки соответствующих двигателей, первые выводы обмоток управления реверсивных коммутаторов соединены с общим проводом питания, вторые выводы обмоток управления реверсивных коммутаторов соединены с первыми выводами размыкающих контактов взаимной блокировки, отличающийся тем, что дополнительно введены входной преобразователь сигнала датчика технологического параметра во входной сигнал микропроцессорного контроллера, система управления на базе микропроцессорного контроллера, выполненная с возможностью реализации функции определения работоспособности частотно-регулируемого преобразователя и сравнения сигнала с датчика технологического параметра с заданными значениями, а затем по полученным результатам вырабатывает соответствующие сигналы управления, поступающие на информационный вход частотно-регулируемого преобразователя и обмотки управления реверсивных коммутаторов, при работоспособности частотно-регулируемого преобразователя и совпадении значений поддержание производительности производится внутренней системой регулирования частотно-регулируемого преобразователя, при отклонении в меньшую сторону производится наращивание производительности путем последовательного плавного разгона очередного двигателя и подключения его на питание от силовой сети, при отклонении в большую сторону производится снижение производительности последовательным отключением работающих двигателей от силовой сети с плавным торможением одного из них, при неработоспособности частотно-регулируемого преобразователя перечисленные выше действия выполняются без плавного разгона или торможения двигателя, выходной преобразователь сигнала с микропроцессорного контроллера во входной информационный сигнал частотно-регулируемого преобразователя, информационный вход которого соединен через выходной преобразователь с первым выходом микропроцессорного контроллера, к остальным выходам микропроцессорного контроллера подключены вторые выводы размыкающих контактов взаимной блокировки реверсивных коммутаторов, а вход микропроцессорного контроллера через входной преобразователь соединен с датчиком технологического параметра.
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| - Энергосбережение, N3 - 4, 1998, с.16 | |||
| SU 922977 A, 23.04.1982 | |||
| Способ пуска группы асинхронных электродвигателей | 1986 |
|
SU1377993A1 |
| Устройство для управления электродвигателями | 1982 |
|
SU1037396A1 |
| US 5569986 A, 29.10.1996 | |||
| US 5670851 A, 23.09.1997. | |||

