Изобретение относится к машиностроению, а именно к быстроразъемным соединениям трубопроводов, и может найти применение в пневматических и гидравлических устройствах наземного космического стартового оборудования, а также нефтяной и газовой промышленности.
Известно быстроразъемное соединение трубопроводов по авторскому свидетельству СССР N 1126763, М.кл. F 16 L 37/00 от 27.07.83, обеспечивающее дистанционную повторную стыковку с ответным разъемом. Первая стыковка осуществляется вручную.
При отстыковке разъем трубопровода фиксируется в том положении, при котором начинается расстыковка. Недостаток технического решения - первоначальная ручная стыковка, при этом повторная дистанционная стыковка возможна только при сохранении ответным разъемом положения, зафиксированного после первой отстыковки.
Известно быстроразъемное соединение трубопроводов по авторскому свидетельству СССР N 1195118, М.кл. F 16 L 37/28 от 16.05.84 (прототип). Устройство обеспечивает поиск ответного разъема при его изменившемся положении в случае повторной стыковки разъемов трубопроводов.
Быстроразъемное соединение снабжено наводящим устройством, кинематически связанным с подводимым разъемом.
При несовпадении осей трубопроводов в процессе стыковки ответный разъем механически взаимодействует с конечными выключателями наводящего устройства и включает его в работу.
При необходимости повторной стыковки стыкуемый разъем подводится к ответному разъему соосно. Если положение ответного разъема изменились, то включается в работу наводящее устройство.
Недостаток данного технического решения - ориентирование происходит после многократного механического контакта с ответным разъемом, что недопустимо при стыковках с бортовыми разъемными соединениями ракеты-носителя или разгонного блока, т.к. механический контакт с бортовыми разъемными соединениями неизбежно приведет к повреждению как самих бортовых разъемов, так и их уплотнительных элементов.
Реализация указанного решения приведет к значительному усилению бортового разъема и узлов его крепления к ракете-носителю и как следствие к увеличению массы как бортового разъема, так и узлов его крепления. Кроме того, значительно увеличена масса стыкуемой платы в связи с тем, что на ней закреплен блок конечных выключателей.
Недостатком указанного решения также является ограниченная зона возможных положений стыкуемых плат, которая не может превышать габаритные размеры блока конечных выключателей.
Эти недостатки устраняются в предлагаемом устройстве тем, что на неподвижном разъеме установлен источник излучения, например инфракрасного, а на подвижном разъеме установлен приемник излучения, который через преобразователь связан электрическими цепями с логическим блоком и блоком управления, а блок управления соединен трубопроводами с источником сжатого газа и приводами наводящего устройства и перемещения подвижного разъема.
Таким образом, в предлагаемом устройстве за счет исключения механического контакта стыкуемых разъемов в процессе ориентирования достигается:
1. Обеспечение безударности стыковки и соответственно уменьшение нагрузок на бортовой разъем и ракету-носитель в целом.
2. Расширение зоны взаимных отклонений стыкуемых разъемов.
3. Автоматизация процесса поноса, ориентирования и стыковки.
4. Обеспечение повторной стыковки в автоматическом режиме.
На приведенных чертежах изображены:
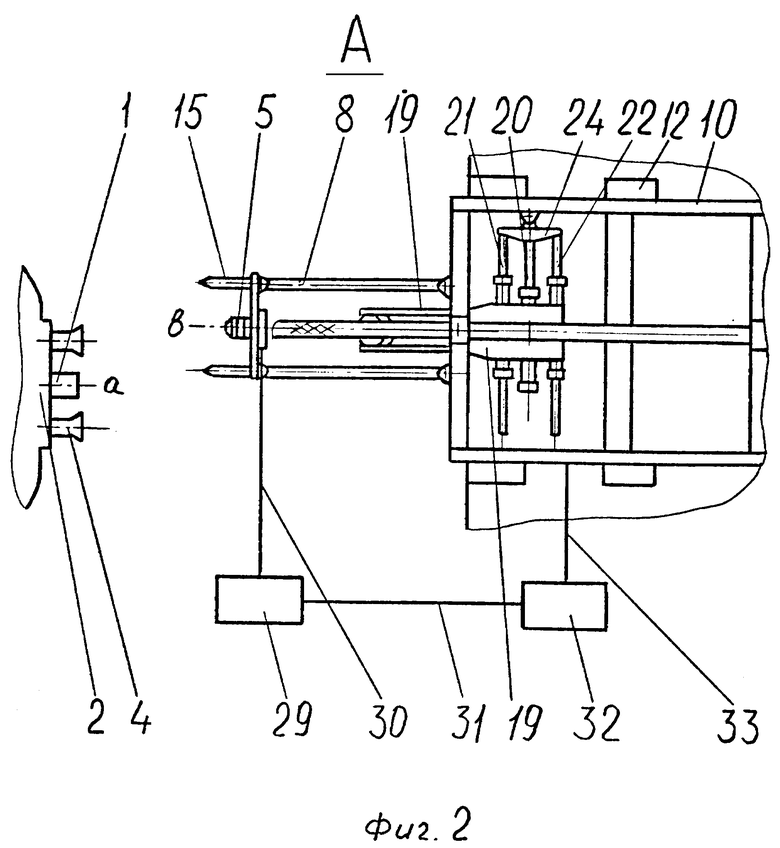
На фиг. 1 - быстроразъемное соединение трубопроводов в разъединенном положении; на фиг. 2 - вид А фиг. 1; на фиг. 3 - схема расположения фотодиодов приемника излучения.
Быстроразъемное соединение трубопроводов содержит неподвижный разъем 1 (фиг. 1), установленный на бортовой плате 2 ракеты-носителя или разгонного блока. На бортовой плате также установлены источник инфракрасного излучения 3 и две направляющие втулки 4. Подвижный разъем 5 с коммуникациями 6 закреплен на стыкуемой плате 7, которая посредством рычажного шарнирного параллелограмма 8 связана со стойкой 9. Стойка жестко закреплена на направляющей 10, установленной на катках 11 стоек 12 основания 13. На плате 7 установлен приемник инфракрасного излучения 14 и два направляющих штыря 15. Для вертикального перемещения платы служит привод вертикального перемещения, состоящий из пневмоцилиндра 16 и гидродемпферов 17, 18. Привод вертикального перемещения шарнирно связан с платой 7 и кронштейном 19, шарнирно установленным на стойке 9. Для поперечного перемещения платы 7 служит привод поперечного перемещения, шарнирно связанный с направляющей 10 (фиг. 2) и кронштейном 19. Привод поперечного перемещения состоит из пневмоцилиндра 20 и гидродемпферов 21, 22. В приводах вертикального и поперечного перемещения платы 7 (фиг. 1) корпуса пневмоцилиндров и демпферов закреплены в обоймах 22, а штоки шарнирно закреплены на кронштейнах 24.
Для продольного перемещения стыкуемой платы 7 служит пневмоцилиндр 25, шарнирно установленный на стойке 26 основания 13. Шток пневмоцилиндра 25 шарнирно связан с направляющей 10.
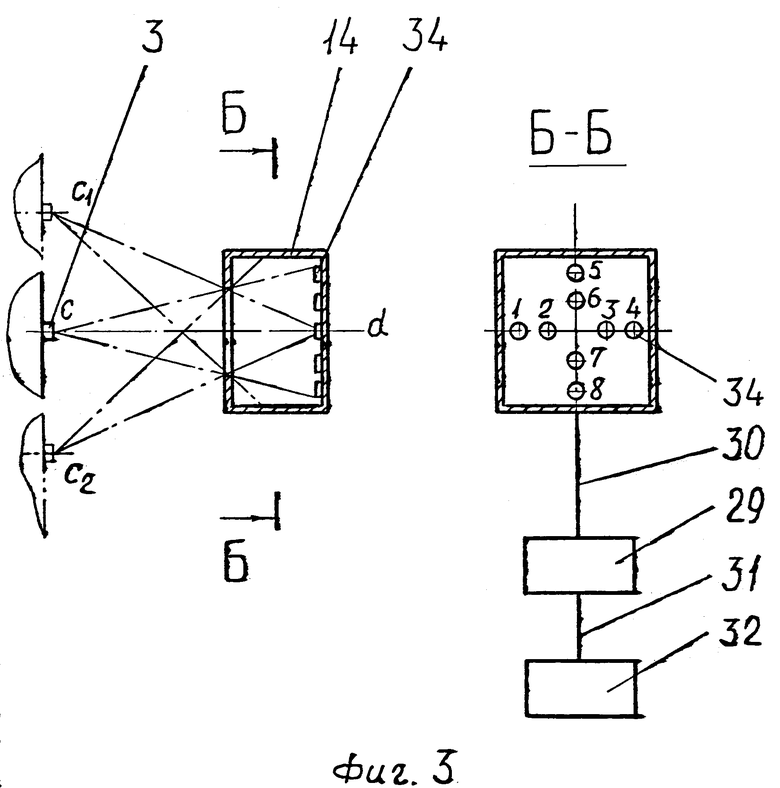
Стыкуемая плата 7 связана с кронштейном 24 привода вертикального перемещения посредством шарнирной пружинной подвески 27. Коммуникации 6 установлены на стойке 9 посредством пружинной подвески 28. Логический блок 29 (фиг. 2) с помощью кабелей 30, 31 связан с приемником инфракрасного излучения и пневмооборудованием 32. Пневмооборудование посредством трубопроводов 33 соединено с пневмоцилиндрами 16, 20, 25 (фиг. 1). В камере приемника 14 (фиг. 3) установлены восемь фотодиодов 34.
Стыковка осуществляется в автоматическом режиме после нажатия кнопки "Стыковка" на командном пункте управления. В исходном положении ось неподвижного разъема "а" (фиг. 1) смещена относительно оси подвижного разъема "b" и соответственно ось источника инфракрасного излучения "с" (фиг. 3) смещена относительно оси приемника "d" - положения "c1" или "c2". В положении "c1" излучение от источника 3 не попадет на фотодиоды 5, 6, а в положении "c2" - на фотодиоды 7, 8, при этом логический блок 29 выдает команду на включение электропневмоклапанов пневмозащиты 32 для подачи сжатого воздуха в пневмоцилиндр 16 (фиг. 1) привода вертикального перемещения платы 7. Плата 7 перемещается в вертикальной плоскости до момента, когда излучение от источника попадет на все фотодиоды вертикального ряда 5, 6, 7, 8 приемника 14 (фиг. 3), при этом ось "c" излучателя совмещается с осью "d" приемника в вертикальной плоскости.
Аналогично происходит перемещение стыкуемой платы в горизонтальной плоскости. Фотодиоды горизонтального ряда 1, 2, 3, 4 выдают сигналы в логический блок 29 и соответственно в пневмоцилиндр 20 (фиг. 2) привода горизонтального перемещения платы 7.
Таким образом плата 7 перемещается в вертикальной и горизонтальной плоскостях до момента, когда все восемь фотодиодов приемника 14 (фиг. 3) окажутся в зоне излучения источника 3, при этом ось "с" источника 3 совместится с осью "d" приемника 14 и соответственно оси "а" и "b" стыкуемых разъемов совместятся. Логический блок 29 формируют сигнал "Цель найдена", после чего автоматически включается электропневмоклапан на подачу сжатого воздуха в пиевмоцилиндр 25 привода продольного перемещения, при этом производится подвод и стыковка платы с бортовым разъемом. На завершающем этапе сближения направляющие штыри 15 заходят в направляющие втулки 4 для окончательного центрирования ответных разъемов.
Если в процессе движения бортовой разъем 1 сместился влево, вправо, вверх, вниз, логический блок выдает соответствующую команду на включение соответствующих электропневмоклапанов, при этом стыкуемая плата 7 переместится до момента совпадения осей "а" и "b" бортового стыкуемого разъема.
В пристыкованном положении смещение бортового разъема компенсируется перемещением рычажного шарнирного параллелограмма 8, разворотом кронштейна 19, срабатыванием пружинной подвески 27.
Таким образом, ориентирование стыкуемого разъема относительно бортового разъема производится как предварительно на этапе сближения, так и окончательно в процессе центрирования направляющими штырями.
Гидродемпферы 17, 18, 21, 22 служат для обеспечения необходимой скорости перемещения стыкуемой платы 7, а также безинерциониой остановки платы при ее перемещениях в процессе ориентирования.
Отстыковка и отвод осуществляются в автоматическом режиме после нажатия кнопки "Отстыковка" на командном пункте управления. Логический блок выдает команду на включение электропневмоклапана пневмощита 32 на подачу сжатого воздуха в пневмоцилиндр 25, при этом происходит расстыковка и отвод в исходное положение подвижного разъема 5.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЫСТРОРАЗЪЕМНОЕ СОЕДИНЕНИЕ ТРУБОПРОВОДОВ | 2002 |
|
RU2260737C2 |
| УСТРОЙСТВО ЗАЩИТЫ РАЗЪЕМОВ КОММУНИКАЦИЙ | 2005 |
|
RU2286505C2 |
| УСТРОЙСТВО ОТВОДА КОММУНИКАЦИЙ С РАЗЪЕМНЫМ СОЕДИНЕНИЕМ | 2005 |
|
RU2298720C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ СТЫКОВКИ КОММУНИКАЦИЙ | 1998 |
|
RU2162185C2 |
| УСТРОЙСТВО ОТВОДА КОММУНИКАЦИЙ С РАЗЪЕМНЫМ СОЕДИНЕНИЕМ | 2004 |
|
RU2281892C2 |
| УСТРОЙСТВО ОТВОДА КОММУНИКАЦИЙ С РАЗЪЕМНЫМ СОЕДИНЕНИЕМ | 2003 |
|
RU2282096C2 |
| УСТРОЙСТВО ОТВОДА КОММУНИКАЦИЙ С РАЗЪЕМНЫМ СОЕДИНЕНИЕМ | 2000 |
|
RU2185315C2 |
| УСТРОЙСТВО ОТВОДА КОММУНИКАЦИЙ С РАЗЪЕМНЫМ СОЕДИНЕНИЕМ | 2004 |
|
RU2282095C2 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ РАЗЪЕМОВ КОММУНИКАЦИЙ ОТ ВОЗДЕЙСТВИЯ ВНЕШНЕЙ СРЕДЫ | 2002 |
|
RU2267051C2 |
| УСТРОЙСТВО ОТВОДА КОММУНИКАЦИЙ С РАЗЪЕМНЫМ СОЕДИНЕНИЕМ | 1997 |
|
RU2124464C1 |
Соединение относится к машиностроению, а именно к быстроразъемным соединениям трубопроводов. Быстроразъемное соединение содержит подвижный и неподвижный разъемы и снабжено устройством ориентирования, включающим в себя источник инфракрасного излучения, приемник инфракрасного излучения, логический блок, пневмощит, а также механическое устройство, обеспечивающее перемещение стыкуемой платы в поперечном и продольном направлениях по сигналам логического блока. Изобретение позволяет исключить механический контакт стыкуемых разъемов в процессе ориентирования. 3 ил.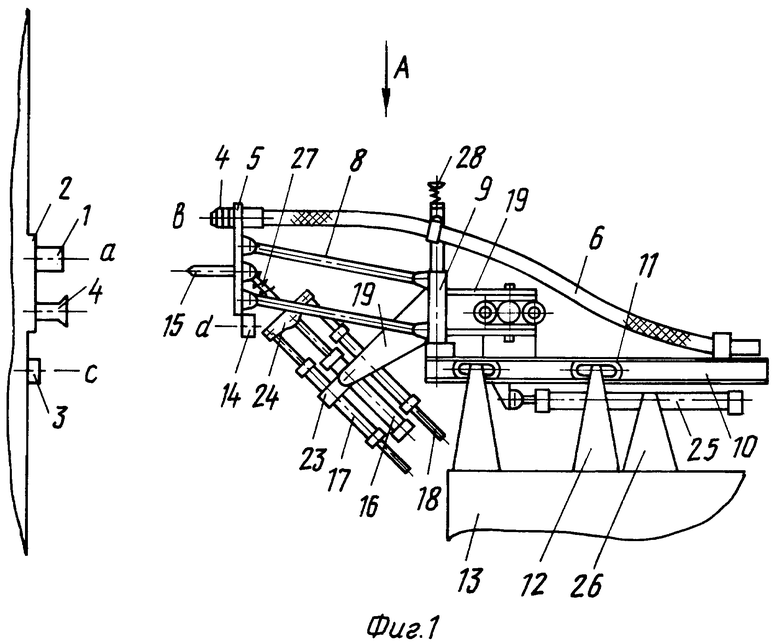
Быстроразъемное соединение трубопроводов, содержащее закрепленный на объекте неподвижный разъем и подвижный разъем, снабженный наводящим устройством, кинематически связанным с подвижным разъемом, и имеющее привод подвода подвижного разъема, отличающееся тем, что на неподвижной разъеме установлен источник излучения, например инфракрасного, а на подвижном разъеме установлен приемник излучения, который через преобразователь связан электрическими цепями с логическим блоком и блоком управления, а блок управления соединен трубопроводами с источником сжатого воздуха и приводами наводящего устройства и перемещения подвижного разъема.
| Быстроразъемное соединение трубопроводов | 1984 |
|
SU1195118A1 |
| Быстроразъемное соединение трубопроводов | 1983 |
|
SU1126763A1 |
| Быстроразъемное соединение трубопроводов | 1987 |
|
SU1439350A1 |
| Быстроразъемное соединение коммуникаций, преимущественно трубопроводов | 1990 |
|
SU1818495A1 |
| Способ нагружения силовых передач в замкнутом контуре при испытании | 1988 |
|
SU1539564A1 |
| DE 3015601 А, 29.10.1981. | |||
