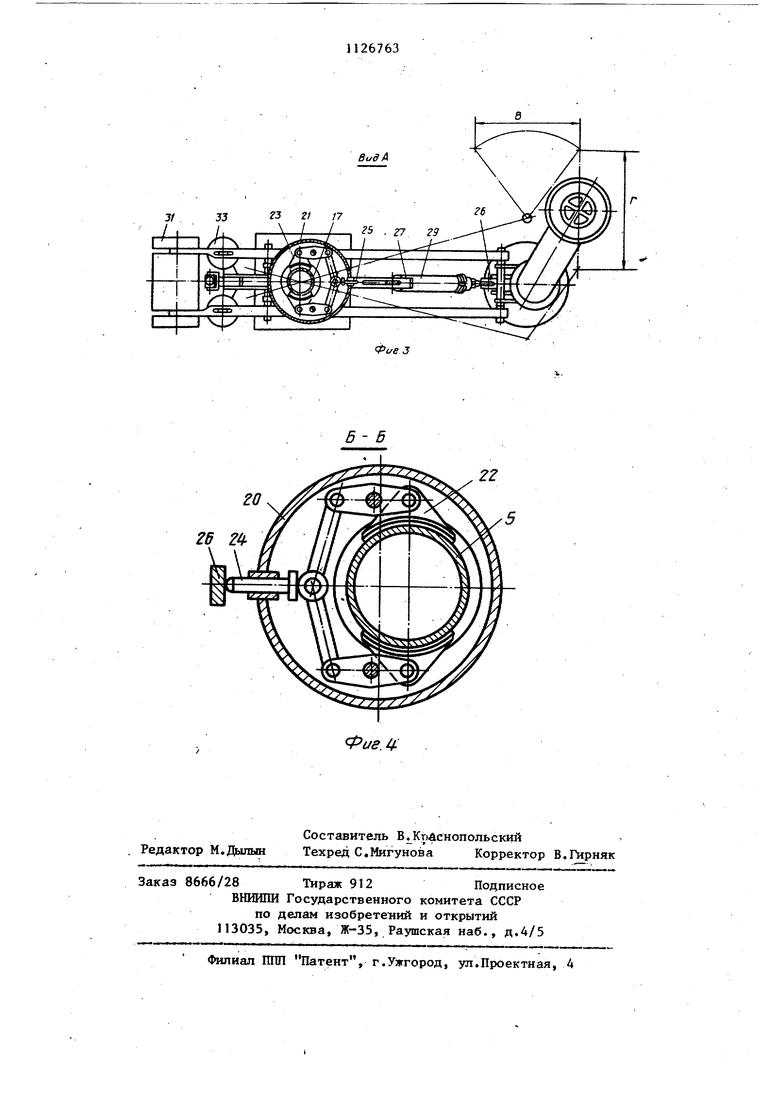
1 Изобретение относится к машиуйстроению, а именно к быстроразъемHbw соединениямтрубопроводов, и .может найти применение в гидравлических и пневматических устройствах Известно быстроразъемное соедине ние трубопроводов, содержащее закрепленный на объекте неподвижный штуце р и подвижный штуцер, снабженный пружиной и расположённый в корпусе 1 J. Однако даиное устройство небезопасно для человека при транспортировке по трубопроводу токсичных веществ, а также не предусмотрена автоматическая повторная стыковка с объектом его изменившемся положении, Цель изобретения - обеспечение безопасной эксплуатации путем осуществления автоматической повторной стыковки с объектом при его изменившенся положении. Указанная цель достигается тем, что быстроразъемное соединение трубопроводов, содержащее закрепленный на объекте неподвижный штуцер и подвижный штуцер, снабженный пружиной в KOiHiyce, снабжено опорой, состоящей из колонны и поворотной относительно нее обоймы, кинематически связанной с подвижным штуцеро выполненным в виде коленчатого трубопровода и установленным в корпусе с возможностью вращения вокруг свое оси, а упомянутая .кинематическая связь коленчатого трубопровода образована пространственным шарнирио параллелограммнь механизмом, звенья которого закреплены соответственно на корпусе и на обойме, при этом между корпусрм и коленчаты трубопроводом я между колонной и обоймой установлены тормоза, на корпусе и обойме закреплены рычаги привода тормозов,соединенные cunoBoV будителем, являющимся диагональю шарнирно-параллелограммного механизма. На фиг.1 изображено быстроразъем ное соединение в сочлененном состоянии; на фиг.2 - устройство после расчленения; на фиг.З - вид А на. фиг.; на 4иг.4 - сечение Б-В на фиг.I. Быстроразъемное соединение трубо проводов содержит закрепленный на объекте I неподвижный штуцер 2, сна жешшй внутренней кояической поверх 32 ностью 3, а также подвижный штуцер 4. Подвижный-штуцер 4 выполнен в виде трубопровода 5, имеющего колено 6, со сферической наружной поверхностью 7 и ловителем 8. Трубопровод 5 гибким рукавом 9 соединен с магистралью 10 и установлен в корпусе 11 с возможностью вращения вокруг своей оси в подшипниках 12. Корпус 11 прост- ранственным шарнирно-параллелртрамным механизмом 13, состоящим из звеньев в виде тяг 14 и 15, кинематически связан с опорой 16, состоящей из колонны 17 и поворотной относительно нее обоймы 18, снабженной подшипниками 19. Тяги 14 и 15 шарнйрно закреплены соответственно на корпусе 11 и обойме 18. Между корпусом 11 и трубопроводом 5 и между колонной 17 и обоймой 18 в кожухах 20 и 21 установлены тормоза 22 и 23, снабженные толкателямй 24 и 25, взаимодействующими соответственно с рычагом 26, шарнир- но установленным на корпусе 11, и рычагом 27, шарнйрно установленным на обойме 18. Рьгчаг 26 соединен со штоком 28 силовозбудителя 29, а рыэаг 27 - с корпусом 30, силовозбудителя, являющегося ,д1«ргональю шарнйрно- параллелограммного механизма 13. На концах тяг 14 закреплен противовес 31, уравновешивающий вес подвижных элементов и улучшающий условия работы пружин 32, размещенных в телескопических штангах 33. Штанги 33 шарнйрно связаны с тягами 14 и посредством балансира 34 - с обоймой 18. К оси 35 балансира 34 шарнйрно подсоединен один из концов винтовой стяжки 36, второй конец которой, сиабженный хвостовиком 37, также шарнйрно связан с кройштейном 38, жестко закрепленные на обойме 18. Работа устройства осуществляется в следумщем порядке. До подачи токсичных компонентов в магистрали 10, когда работа с устройсФвом безопасна, вручную про- , изводится сочленение штуцеров 2 и 4, для чего вращением хвостовика 37 винтовой стяжки 36 поворачивают бапга1сир 34, поднимая штанги 33, и за счет поворота тяг 14 и 15 подвижный штуцер 4 опускается во избежание нежелательного соударения со штуце ром 2. Затем вручную подвижный штуцер 4 подводится к неподвижному штуцеру 2 и
устанавливается соосно ему. После этого вращением винтовой стяжки 36 балансир 34 отпускается и штуцер А подводится к штуцеру 2. В процессе подведения происходит окончательное центровка штуцера 4 за счет ловителя. 8. Стыковая заканчивается при установке .сферической поверхности 7 штуцера 4 в коническую поверхность 3 шtyцepa 2. Затем вращением стяжки 36 обеспечивается уплотнение соединения за счет поджатия пружинами 32 притертых сферической 7 И конической 3 поверхностей стыкующихся элементов с усилием, исключанг щим раскрытие стыка. Далее через соединение трубопроводов подаются соответствунлцие компоненты. Возникающие в процессе работы объекта 1 как продольные В, так и.поперечные Г перемещения штуцера 2 отлеживаются за счет свободного проворота трубопровода 5 с коленом 6 в корпусе 11 и шарнирно-параллелограммного механизма 13 на колонне 17.
При отстыковке подвижного.штуцера 4 подается давление в силовозбу- ,дитель 29, его щток 28 вьздвигается, рычаги 26 и 27 поворачивается,воздействуя на толкатели 24 и 25 тормозов 22 и 23 и затормаживая труббпровод 5 и обойму 18 в том положении, при котором начинается расстыковка.
После полного выбора хода толкателей 24 и 25 за счет Удлинения диагонали параллелограмма, обеспечиваемого выдвижением штока 28 сидовозбудителя 29, преодоле вая усилие пружин 32, штуцер 4 отво дится от штуцера 2. При необходимости повторной стыковки давление из силовозбудитёля 29 сбрасывается и под воздействием пружин 32 штуцер подводится к штуцеру 2. При этом растормаживание не происходит, так как толкатели 24 и 25 тормозов 22 и 23 поджимаются усилием пружин 32 и положение штуцера 4 относительно штуцера 2 не меняется. Отклонния, которые при подводе штуцера 4 могут возникнуть, незначительны, и вхозвдение ловителя в штуцер 2 гарантируется. При соприкосновении шту цера 4 со штуцером 2 усилие пружин 32 передается на штуцер 2, толкатели 24 и 25 тормозов 22 и 23 освобоагдаются, обеспечивая свободное перег мещение непосредственно при стЬосов- ке соединения. Усилием пружии 32 штуцер 4 поджимается к штуцеру 2, обеспечивая их сочленение.
Технико-экономическая эффективность данного устройства обусловлеяа автоматизацией повторных стыковок с объектом ;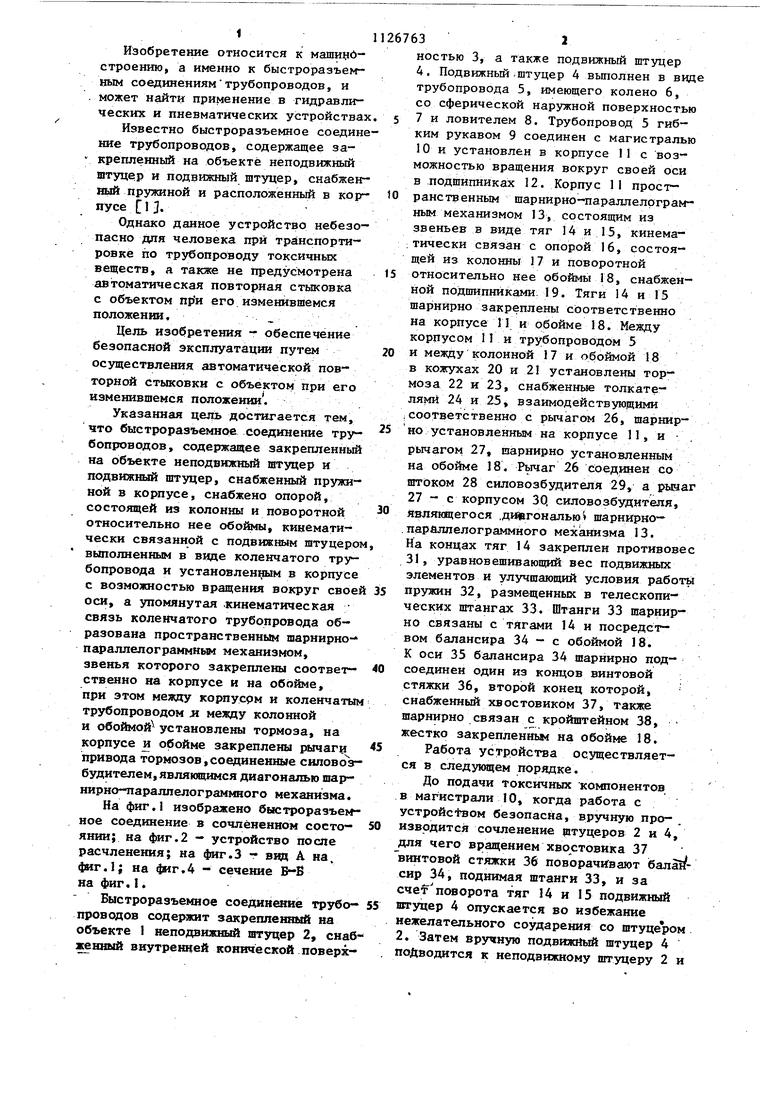

| название | год | авторы | номер документа |
|---|---|---|---|
| Центрирующий механизм для коммутации подвижного и неподвижного объектов | 1984 |
|
SU1216812A1 |
| Коммутационное устройство | 1979 |
|
SU849348A1 |
| Устройство для обслуживания вертикально расположенных объектов | 1980 |
|
SU990615A1 |
| Быстроразъемное соединение трубопроводов | 1987 |
|
SU1439350A1 |
| Соединение трубопроводов | 1987 |
|
SU1451421A1 |
| Быстроразъемное соединение трубопроводов | 1972 |
|
SU458685A1 |
| Коммутационное устройство | 1989 |
|
SU1686557A1 |
| БЫСТРОРАЗЪЕМНОЕ СОЕДИНЕНИЕ ТРУБОПРОВОДОВ | 2002 |
|
RU2260737C2 |
| Быстроразъемное соединение трубопроводов | 1984 |
|
SU1195118A1 |
| Коммутационное устройство | 1979 |
|
SU851584A1 |
БЫСТРОРАЗЬБМНОЕ СОЕДИНЕНИЕ ТРУБОПРОВОДОВ, содержащее закрепленньй на объекте неподвижный штуцер и подвижный штуцер, снабженный пружиной и расположенный в корпусе, отличающееся тем, что, с целью безопасной эксплуатации путем осуществления автоматической повторной стыковки с объектом при его изменившемся положении, оно снабжено опорой, состоящей из колонны и поворотной относительно нее обоймы, кинематически связанной с подвижным штуцером, выполненным в виде коленчатого трубопровода и установленным в корпусе с возможностью вращения вокруг своей оси, а упомянутая кинематическая связь коленчатого трубопровода образована п ро стр ан с ТВ е н ным шарнирно-паралл ел ограммным механизмом, звенья которого закреплены соответственно на корпусе и на обойме, при этом корпусом и коленчатым трубопроводом и меяаду колонной и обоймой установлены торi моза, на корпусе и обойме закреплены рычаги привода тормозов, соединенные силовозбудителем, являкяцимся диагональю упомянутого иарнирно-параллелограммного механизма. ю О) 1 о со
го
Б- 6
22
Фиг. 4
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское, свидетельство СССР № 697768, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
