Изобретение относится к области машиностроения, а именно к быстроразъемным соединениям трубопроводов, и может быть применено в быстроразъемных соединениях криогенных заправочных коммуникаций наземного стартового комплекса с ракетой.
Известно быстроразъемное устройство для стыковки трубопроводов по патенту ФРГ №1284750, М. кл. F 16 L 37/00, содержащее фланцы, скрепляемые между собой с помощью крюков, расположенных на патрубке и связанных через тяги с пружинными компенсаторами. Основным недостатком указанного устройства являются большие габариты, ввиду того, что элементы устройства (крюки, тяги, пружинные компенсаторы, замок, привод) установлены последовательно.
Известно быстроразъемное соединение трубопроводов по патенту ФРГ №1750783, М. кл. F 16 L 37/20, содержащее подвижный и неподвижный трубопроводы с фланцевыми разъемами, привод, при этом подвижный трубопровод снабжен запирающим механизмом, состоящим из захватов, шарнирно установленной обоймы, связанной с захватами через тяги-компенсаторы.
Основным недостатком известного быстроразъемного соединения является то, что захваты не могут пространственно ориентироваться относительно опорной поверхности ответного фланца неподвижного трубопровода, что не позволяет создать равномерное усилие стягивания по периметру ответных фланцев.
В известной конструкции невозможно обеспечить полный охват по периметру ответного фланца опорными поверхностями захватов. В результате для обеспечения герметичности стыка в условиях деформаций фланцев при криогенных температурах заправляемых компонентов необходим жесткий массивный фланец ответного разъема ракеты-носителя, что приводит к ее утяжелению. Кроме того, конструкция захватов позволяет запереть стык только при полной достыковке ответных фланцев.
В реальности стыковка подвижного разъема осуществляется несоосно ответному разъему. Несоосность зависит от зазора по направляющим штырям и от диаметра стыкуемых фланцев (при перекосе в 1° при диаметре фланцев 500 мм недостыковка составляет 9 мм).
Указанные недостатки устраняются в предлагаемом устройстве тем, что на подвижном трубопроводе дополнительно на осях установлены промежуточные тяги, шарнирно связанные с захватами, при этом шарниры, соединяющие захваты с промежуточными тягами, размещены между зонами контакта захватов с фланцем неподвижного трубопровода и шарнирами, соединяющими захваты с тягами-компенсаторами, кроме того, на захватах установлены пружинные толкатели, взаимодействующие с промежуточными тягами.
Таким образом, в предлагаемом устройстве:
1. За счет введения на подвижном трубопроводе на осях промежуточных тяг, шарнирно связанных с захватами, размещение шарниров, соединяющих захваты с промежуточными тягами между зонами контакта захватов с фланцем неподвижного трубопровода и шарнирами, соединяющими захваты с тягами-компенсаторами, обеспечивается пространственное ориентирование захватов относительно опорной поверхности ответного фланца неподвижного трубопровода, обеспечивается максимально полный охват по периметру ответного фланца опорными поверхностями захватов, при этом обеспечивается равномерное усилие стягивания по периметру ответных фланцев.
В результате обеспечивается герметичный стык в условиях деформаций фланцев при криогенных температурах заправляемых рабочих тел (например, жидкого водорода при температуре минус 253°С) при меньшей жесткости и массе ответного разъема ракеты.
2. За счет введения на захватах пружинных толкателей, взаимодействующих с промежуточными тягами, обеспечивается работоспособность устройства при перекосах стыкуемых трубопроводов горловины ракеты и стыкуемого трубопровода.
Сущность изобретения поясняется чертежами.
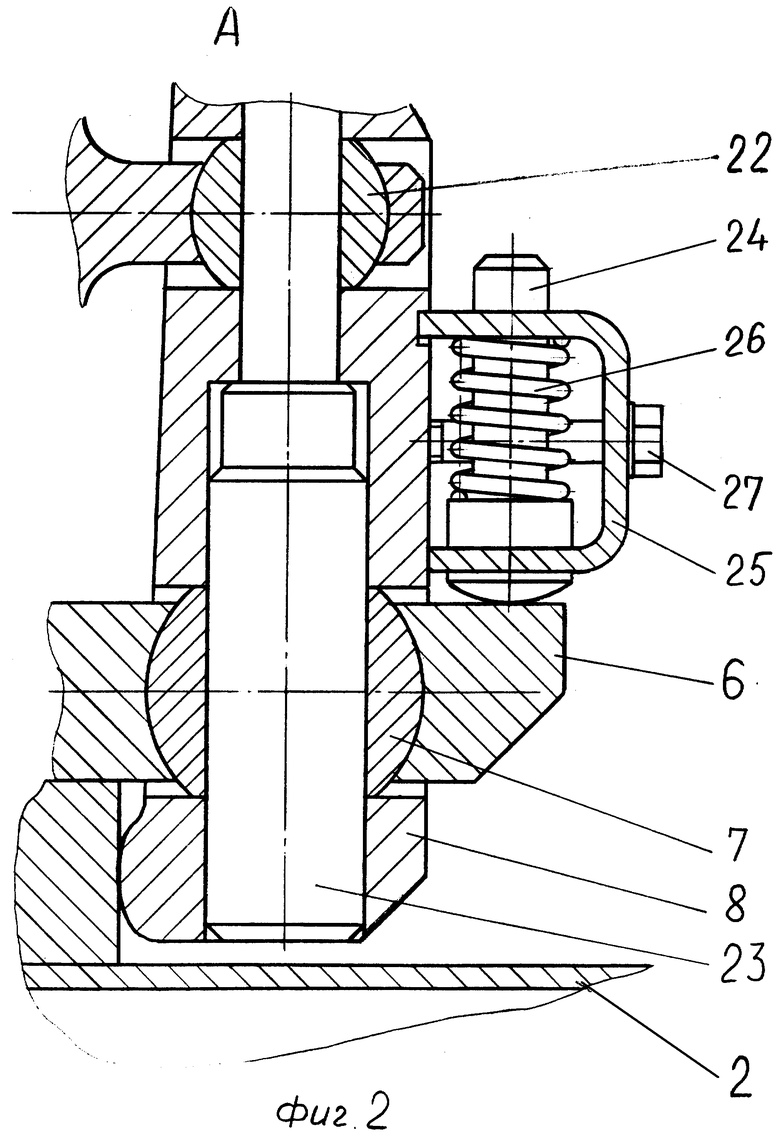
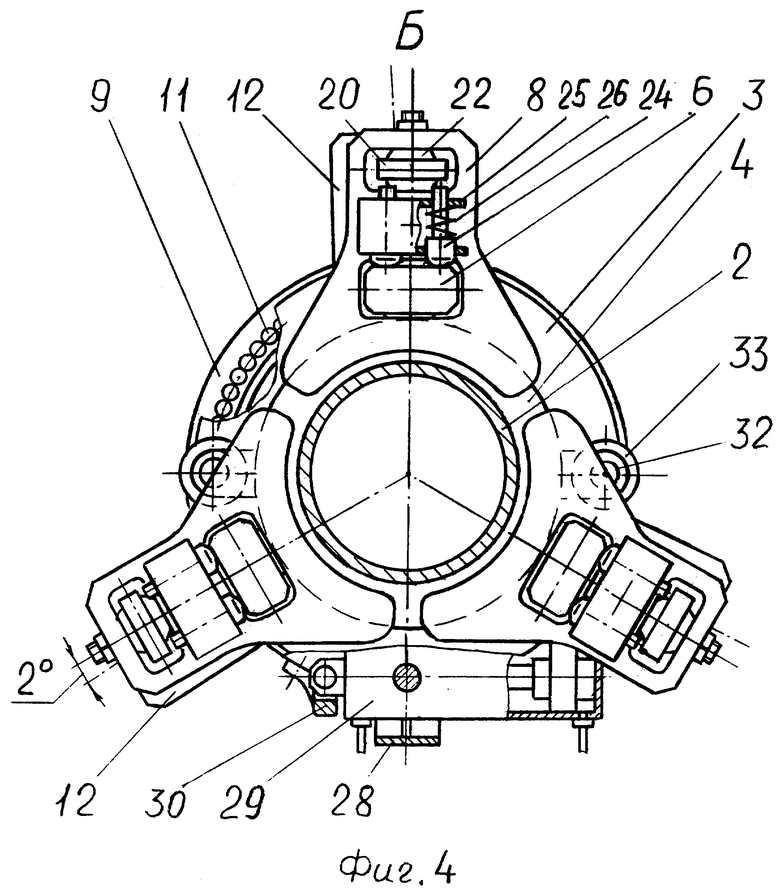
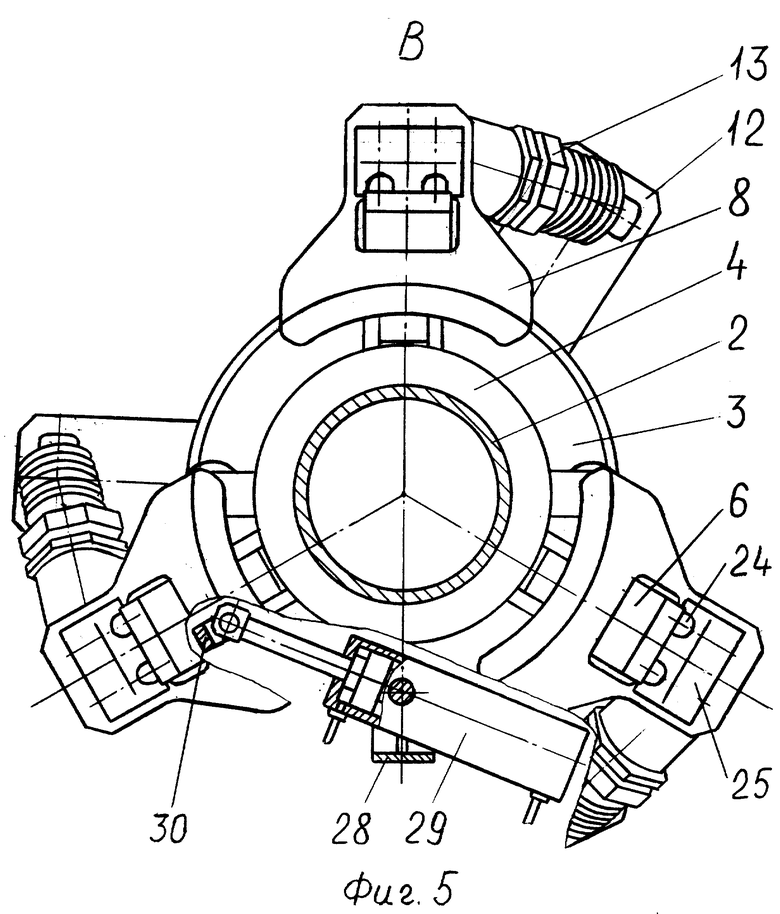
На фиг.1 изображено быстроразъемное соединение трубопроводов в состыкованном положении; на фиг.2 - вид А фиг.1; на фиг.3 - быстроразъемное соединение трубопроводов в расстыкованном положении; на фиг.4 - вид Б фиг.1; на фиг.5 - вид В фиг.3.
Быстроразъемное соединение состоит из подвижного трубопровода 1 (фиг.1), расположенного в зоне обслуживания ракеты и неподвижного трубопровода 2, установленного на борту ракеты, являющегося заправочной горловиной. На трубопроводе 1 расположен корпус 3, а на трубопроводе 2 - фланец 4. На корпусе 3 в осях 5 крепятся промежуточные тяги 6, которые через шаровые опоры 7 связаны с захватами 8. На корпусе 3 при помощи фланца 9 крепится болтами 10 в двухстороннем упорном подшипнике 11 обойма 12. Шарики подшипника 11 уложены в канавки по всему периметру с обеих сторон обоймы 12 (фиг.4). Обойма 12 (фиг.1) связана с захватами через тяги-компенсаторы 13 (фиг.5).
На корпусе 14 компенсатора 13 с помощью болта 15 устанавливается начальное поджатие пакета тарельчатых пружин 16, кроме того, на корпусе установлен упорный подшипник 17 и регулировочный болт 18, на котором контргайкой 19 фиксируется стакан 20.
Компенсаторы 13 связаны с обоймой 12 и захватами 8 через шаровые опоры 21 и 22. Шаровые опоры 7 и 22 связаны с захватами 8 осями 23. На захватах 8 (фиг.2) установлены толкатели 24 по оси симметрии захватов 8. Толкатели установлены в кронштейнах 25 на пружинах сжатия 26, причем упорные поверхности толкателей взаимодействуют с промежуточными тягами 6. Кронштейны 25 закреплены в пазах захватов болтами 27. На кронштейне 28 (фиг.1) в цапфах установлен пневмоцилиндр 29, шток которого шарнирно связан с кронштейном 30, установленным на обойме 12. На фланце корпуса 3 установлена торцевая уплотнительная манжета 31. На трубопроводе 1 расположены два направляющих штыря 32, а на ответном разъеме 2 - направляющие конусы 33.
Устройство работает следующим образом. При сближении трубопровода 1 (фиг.3) с ответным трубопроводом 2, установленным на борту ракеты, захваты 8 находятся в раскрытом положении, шток пневмоцилиндра 29 находится в крайнем переднем положении (фиг.5). Захваты 8 (фиг.3) развернуты относительно промежуточных тяг 6 в шарнирах 7 с помощью толкателей 24 до упора в отверстиях захватов на 15°-20°. Направляющие штыри 32 входят в ответные направляющие конусы 33 на ответном трубопроводе 2 (фиг.3) до контакта стыкуемых поверхностей фланцев подвижного трубопровода и бортового разъема ракеты.
Так как стыковка ответных трубопроводов осуществляется с некоторым перекосом осей, то после центрирования направляющими штырями 32 в ответных конусах 33 появляется остаточная недостыковка «а» (фиг.3) уплотняемых поверхностей, которая тем больше, чем больше диаметр стыкуемых фланцев и зазор между штырями и отверстиями конусов.
После подачи давления сжатого воздуха в пневмоцилиндр 29 шток пневмоцилиндра разворачивает обойму 12 в подшипнике 11 относительно оси трубопровода. Одновременно поворачиваются относительно этой же оси сферические шарниры 21 (фиг.1) тяг-компенсаторов 13. Появляется составляющая усилия, действующая вдоль осей тяг-компенсаторов 13 на сферические шарниры 22 захватов, при этом захваты 8 совместно с промежуточными тягами 6 поворачиваются в осях 5 до касания захватами опорной поверхности фланца 4 ответного трубопровода 2. При дальнейшем повороте обоймы 12 захваты 8 начинают разворачиваться в сферических шарнирах 7 и 22, захватывая ответный фланец 4 до плотного прилегания опорных поверхностей захватов 8 и фланца 4, при этом сжимаются пружины 26 (фиг.2) толкателей 24. Одновременно сжимается пакет тарельчатых пружин 16 (фиг.1). Оси тяг-компенсаторов 13 попадают в одну плоскость с осями промежуточных тяг 6 - момент максимального сжатия пакета тарельчатых пружин 16. Затем обойма дополнительно поворачивается на 2° (фиг.4). В этот момент шток пневмоцилиндра 25 доходит до упора в крайнем заднем положении. Перебег 2° необходим для предотвращения самопроизвольного открытия стыка. В этом положении быстроразъемное соединение закрыто. Пакеты тарельчатых пружин 16 обеспечивают необходимое усилие на захватах для герметизации стыка с помощью уплотнительной манжеты 31, а также обеспечивают компенсацию линейных изменений размеров элементов соединения при транспортировке по трубопроводам криогенных рабочих тел, например жидкого водорода при температуре минус 253°С.
Усилия на пакетах тарельчатых пружин 16 регулируются болтами 18 при свинченных контргайках 19. Подшипники 17 обеспечивают возможность регулировки при значительных усилиях в пакетах тарельчатых пружин 16.
Для открытия захватов подается давление сжатого воздуха в пневмоцилиндр 29 (фиг.4). Шток пневмоцилиндра поворачивает обойму 12 относительно оси трубопровода в направлении открытия захватов. Пакет тарельчатых пружин 16 (фиг.1) начинает сжиматься, а после прохождения критической точки - через 2° поворота обоймы - начинает разжиматься до контакта регулировочных болтов 18 с болтами 15. После этого тяги-компенсаторы 13 через сферические шарниры 22 создают усилие в направлении открытия захватов 8, при этом захваты под действием толкателей 24 (фиг.2) с пружинами 26 разворачиваются в шарнирах 7 до упора промежуточных тяг 6 в отверстиях захватов 8 (фиг.3), освобождая фланец горловины ракеты, при этом промежуточные тяги занимают положение закрытых захватов. После контакта захватов 8 с промежуточными тягами 6 в отверстиях захватов начинается совместный поворот захватов с промежуточными тягами на осях 5 до момента, когда шток пневмоцилиндра 29 переместится в крайнее переднее положение (фиг.3).
В этом положении захваты полностью открыты. Затем подвижный трубопровод 1 перемещается от бортового разъема ракеты.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЫСТРОРАЗЪЕМНОЕ СОЕДИНЕНИЕ ТРУБОПРОВОДОВ | 1998 |
|
RU2155294C1 |
| СОЕДИНИТЕЛЬНАЯ МУФТА ТРУБОПРОВОДОВ С ПРИВОДОМ | 2024 |
|
RU2832372C1 |
| УСТРОЙСТВО ОТВОДА КОММУНИКАЦИЙ С РАЗЪЕМНЫМ СОЕДИНЕНИЕМ | 2003 |
|
RU2282096C2 |
| УСТРОЙСТВО ОТВОДА КОММУНИКАЦИЙ С РАЗЪЕМНЫМ СОЕДИНЕНИЕМ | 2004 |
|
RU2282095C2 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ РАЗЪЕМОВ КОММУНИКАЦИЙ ОТ ВОЗДЕЙСТВИЯ ВНЕШНЕЙ СРЕДЫ | 2002 |
|
RU2267051C2 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ УПРАВЛЯЕМОЙ СТЫКОВКИ РАЗЪЕМНЫХ СОЕДИНИТЕЛЕЙ КОММУНИКАЦИЙ | 2009 |
|
RU2417492C2 |
| Устройство для крепления и смены оптических головок лазерных технологических комплексов | 1990 |
|
SU1796384A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ СТЫКОВКИ КОММУНИКАЦИЙ | 1998 |
|
RU2162185C2 |
| СИЛЬФОННЫЙ КОМПЕНСАТОР | 2014 |
|
RU2561816C1 |
| МУФТА АВАРИЙНОГО РАЗЪЕДИНЕНИЯ | 2023 |
|
RU2813001C1 |

Быстроразъемное соединение трубопроводов предназначено для использования в области машиностроения. Соединение содержит неподвижный и подвижный трубопроводы. На подвижном трубопроводе дополнительно на осях установлены промежуточные тяги. Последние шарнирно связаны с захватами. Соединяющие захваты с промежуточными тягами размещены между зонами контакта захватов с фланцем неподвижного трубопровода и шарнирами, соединяющими захваты с тягами-компенсаторами. На захватах установлены пружинные толкатели. Последние взаимодействуют с промежуточными тягами. Обеспечивается повышение надежности герметизации состыкованного трубопровода с ответным разъемом борта ракеты и уменьшение габаритов и веса установленного на борту ракеты разъема. 5 ил.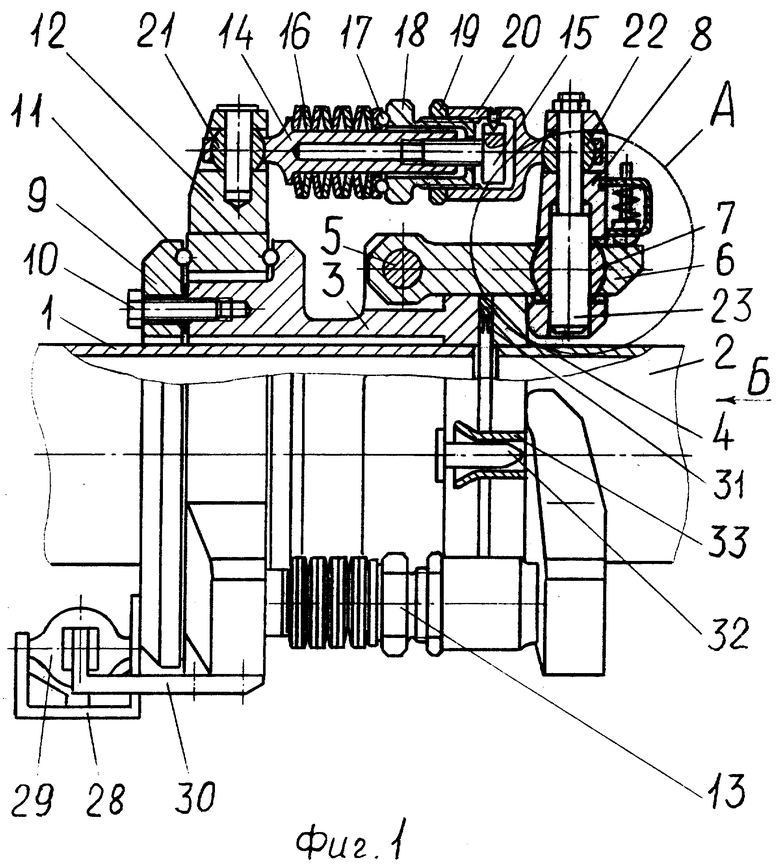
Быстроразъемное соединение трубопроводов, содержащее неподвижный трубопровод с фланцевым разъемом, установленный на борту ракеты, и подвижный трубопровод с фланцевым разъемом, снабженный запирающим механизмом, состоящим из захватов, шарнирно установленной обоймы, связанной с захватами через тяги-компенсаторы, и привода, отличающееся тем, что на подвижном трубопроводе дополнительно на осях установлены промежуточные тяги, шарнирно связанные с захватами, при этом шарниры, соединяющие захваты с промежуточными тягами, размещены между зонами контакта захватов с фланцем неподвижного трубопровода и шарнирами, соединяющими захваты с тягами-компенсаторами, кроме того, на захватах установлены пружинные толкатели, взаимодействующие с промежуточными тягами.
| Устройство для пространственной гибки заготовки из проката | 1990 |
|
SU1750783A1 |

