Изобретение относится к способу определения скоростей миграций при обработке сейсмических данных, а также к определению точности измерения указанных скоростей.
Для получения знаний о среде используют интерактивные системы интерпретации. Интерактивная интерпретация в настоящее время больше не ограничивается двумерным (2D) представлением, независимо от того выполняется ли она на физическом носителе, таком как бумага, или она отображена на экране дисплея. В настоящее время широко распространилась трехмерная (3D) технология отображения данных, которая ведет к получению трехмерной модели изучаемой части среды. Наряду с другими способами, применяемыми для получения модели высокого качества, используют способ глубинных миграций или временных миграций, то есть когда сейсмическое событие на сейсмическом разрезе воспроизводится в модели в соответствии с глубиной, на которой оно было обнаружено или в соответствии со временем, после которого оно было локализовано.
Одна из самых сложных проблем в сейсмологии при определении глубинной миграции заключается в получении поля скоростей миграций, которое было бы наиболее репрезентативным или как можно более близким к полю скоростей приповерхностной зоны пласта, поскольку скорости распространения акустических волн могут меняться не только от слоя к слою или от пласта к пласту, но также и в пределах данного пласта.
Более того, необходимо иметь возможность оценить неопределенность вычисленных или измеренных значений скоростей. Это необходимо в связи с тем, что, используя эти скоростные неопределенности, связанные с неопределенностями времен прибытия, геофизик будет иметь возможность, например, вычислить неопределенности по объемам пород, пропитанных углеводородами.
Для этого используют новые технологии. Эти технологии предусматривают, например, способ, в соответствии с которым для получения приближения к правильной модели скоростей используется технология, называемая "монтаж сейсмических трасс" или изо-X кривых. Способ такого типа не позволяет измерить неопределенности по полученным скоростям, поскольку в нем отсутствуют конкретный аналитический критерий для измерения этих неопределенностей.
Еще один способ заключается в оценке неопределенности, которая находится в зависимости от значений скоростей, принятых в заранее заданной модели приповерхностной зоны. Этот способ известен под общим названием, а именно - способ когерентности. Хотя способ этого типа дает хорошие результаты в некоторых случаях применения, например, таких как описаны в статьях, помещенных в публикации "Передняя кромка", октябрь 1995 года, том 14, номер 10 ("the Leading Edge", October 1995, Vol. 14, N 10), тем не менее, он не дает возможности отделить с достаточной степенью точности ошибки, возникающие из-за несовершенства по морфологии модели приповерхностных пород от ошибок, возникающих из-за неточности величин скоростей.
В указанных выше способах трудности возникают в результате того, что при изменении значения местной скорости зоны, когда поверхности раздела или горизонты не являются плоскими и горизонтальными, когда лучи, описывающие распространение акустических волн в этой зоне, смещаются в поперечном направлении одновременно с изменением времени их распространения, в то время как пространственные рамки измерения остаются фиксированными. В результате этого закон, описывающий деформацию изо-X кривых или изображений сейсмических трасс как функцию изменения в скоростях, является нелинейным и необратимым.
Монтаж сейсмических трасс соответствует наборам следов, которые отсортированы для заданного X, и исходят от миграции с постоянным смещением. Эти следы обычно сортируют по мере увеличения смещения.
Изо-X кривые возникают от перемещения пункта взрыва.
В основу настоящего изобретения положена задача предложить новый способ, в соответствии с которым были бы преодолены недостатки, присущие способам предшествующего уровня техники, и сделать возможным учет изменений в скоростях.
Еще одной задачей настоящего способа, осуществляемого в соответствии с настоящим изобретением, является получение поля скоростей, которое было бы очень близким к полю скоростей среды.
Еще одной задачей настоящего способа, осуществляемого в соответствии с настоящим изобретением, является измерение или по меньшей мере получение более качественных и полных знаний о неопределенностях по вычисляемым величинам скоростей.
Способ определения поля скоростей в среде, осуществляемый в соответствии с настоящим изобретением, заключается в использовании пункта (S) взрыва, связанного с приемниками (R1 - Rn), которые размещены один относительно другого со сдвигом, и отличающийся тем, что первый набор следов, которые исходят из пункта взрыва и записываются приемниками, и второй набор следов, имеющих смещение, который постоянен и коллинеарен с указанным первым набором, мигрируют в заданном поле скоростей, чтобы получить два мигрированных изображения части среды, соответствующие указанным наборам следов, и эти два мигрированные изображения коррелируют с помощью двумерной пространственной корреляции, результат которой определяет разность между используемой скоростью миграции и желаемой скоростью.
При этом предполагается, что термин коллинеарность наборов следов означает поверхность, которая содержит все предсуммарные и постсуммарные лучи, другими словами эта поверхность, содержащая предсуммарные лучи, которая совпадает с поверхностью, содержащей постсуммарные лучи.
В соответствии с другой особенностью настоящего изобретения указанная миграция является глубинной миграцией.
В соответствии с другой особенностью настоящего изобретения указанная миграция является временной миграцией.
В соответствии с еще одной особенностью настоящего изобретения указанную корреляцию выполняют с использованием способа поверхностной когерентности.
В соответствии с еще одной особенностью настоящего изобретения указанную корреляцию выполняют с использованием способа линейной когерентности.
В соответствии с еще одной особенностью настоящего изобретения перед осуществлением указанного способа линейной когерентности осуществляют способ поверхностной когерентности.
В соответствии с еще одной особенностью настоящего изобретения, указанный способ поверхностной когерентности заключается в:
a) определении для первой из двух мигрированных изображений по меньшей мере первого окна, размеры которого таковы, что оно содержит по меньшей мере одно из сейсмических событий, выбранных на указанном первом изображении;
b) выявления в указанном первом окне элементарной амплитуды (Aij), которая представляет собой среднюю величину амплитуд элементов изображения в первом изображении, которые включены в указанное первое окно;
c) совмещении центра указанного первого окна с координатами (x, z);
d) перемещении указанного первого окна по всей поверхности разреза, мигрированного по глубине;
e) выполнении этапов от a) до d) для второго из двух мигрированных изображений с помощью по меньшей мере второго окна, в котором определена единичная амплитуда (Bij), которая представляет собой среднюю величину амплитуд элементов изображений второго изображения, которая включена в указанное второе окно, и в
f) определении коэффициента корреляции (Г) путем совмещения по меньшей мере двух окон, первое из которых связано с одним из двух мигрированных изображений, а второе связано со вторым из указанных мигрированных изображений, при этом указанные совмещенные окна имеют одно и то же пространственное положение.
В соответствии с другой особенностью настоящего изобретения способ, кроме того, заключается в вычислении и представлении по необходимости линий равного значения коэффициента (Г) корреляции, которые здесь и далее будут называться как изолинии равного значения,
- в определении максимальной величины (Гм) указанного коэффициента (Г) корреляции,
- в нанесении координат (x', z') точки максимальной корреляции (Гм),
- в вычислении половинной величины равных значений (Гм/2), определяемой как половина максимальной величины (Гм) коэффициента корреляции.
В соответствии с еще одной особенностью настоящего изобретения способ заключается в измерении векторов перемещения, дающих представление о величине смещения между двумя мигрированными изображениями, при этом указанные вектора перемещения измеряют по всей поверхности, которая является общей для двух мигрированных изображений и лежит в пределах каждой изолинии половинной величины равных значений (Гм/2).
В соответствии с еще одной особенностью настоящего изобретения вычисляются боковые градиенты используемого поля скоростей перемещения так же, как и знак ошибки, по скорости миграции, вблизи от точки максимальной корреляции (Гм), затем векторы перемещения, находящиеся между указанной точкой и кривой корреляции, представляющей половинную величину равных значений (Гм/2), суммируют отдельно слева и справа от указанной точки так, что бы получить суммарный вектор на каждой стороне от точки максимальной корреляции, направление или знак которого определяет медленный или быстрый характер местной скорости миграции по отношению к оптимальной скорости, затем сравнивают знаки этих суммарных векторов для того, чтобы определить наличие или отсутствие боковой компоненты скорости миграции.
В соответствии с еще одной особенностью настоящего изобретения:
g) получают два мигрированных по глубине изображения, одно из которых представлено мигрированными по глубине сейсмическими событиями, а другое представлено мигрированным по глубине пунктом взрыва,
h) на каждом из двух мигрированных изображений выбирают отдельное событие,
i) вычисляют расстояние между двумя выбранными явлениями для последующего вычисления длины вектора местного перемещения.
В соответствии с еще одной особенностью настоящего изобретения выполняют этапы h) и i) и с помощью технологии отслеживания трасс лучей вычисляют два ограничивающих луча, соответствующих нулевому смещению (SHS) лучей и максимальному смещению (SBRn) лучей.
В соответствии с еще одной особенностью настоящего изобретения используют множество пунктов взрыва, которые мигрируют с совершением колебательных движений в различных плоскостях перемещения.
В соответствии с еще одной особенностью настоящего изобретения два набора следов мигрируют с помощью одного и того же алгоритма.
Одно из преимуществ настоящего изобретения заключается в получении возможности сравнения двух отдельных мигрированных изображений. Когда два мигрированных изображения в пространственном поле идентичны, то корреляция будет максимальной, и в результате этого будет сделан вывод, что используемое поле скоростей является точным.
Когда используемое поле скоростей слишком медленное или слишком быстрое по сравнению с действительным полем скоростей, то корреляция уменьшается по периферийным частям поля перемещения, при этом максимальная величина сохраняется в положении, где предсуммарные и постсуммарные мигрированные лучи одни и те же.
Более того, вектор перемещения корреляции, указывающий направление, в котором одно мигрированное изображение искажено по сравнению с другим, изменяет направление и в соответствии с этим знак, когда ошибка по скорости также изменяет знак.
Благодаря этим двумерным функциям корреляции получают средство, в общем для двух мигрированных изображений в пространственном поле, для измерения наиболее вероятной скорости, а также для оценки неопределенности по скоростям, которая получается при измерении полной ширины при половине максимума функции, дающей стандартное отклонение корреляции как функции скорости.
Другие преимущества и особенности настоящего изобретения будут более понятны из описания способа, соответствующего настоящему изобретению, а также из описания прилагаемых чертежей, на которых:
фиг. 1 - схематическое изображение предсуммарных и постсуммарных лучей, распространяющихся в пласте со скоростью V1, а также временных изображений указанных лучей;
фиг. 2 аналогична фиг. 1 с той лишь разницей, что поле скоростей определено с помощью полубесконечной среды, содержащей различные скорости V1 и V2;
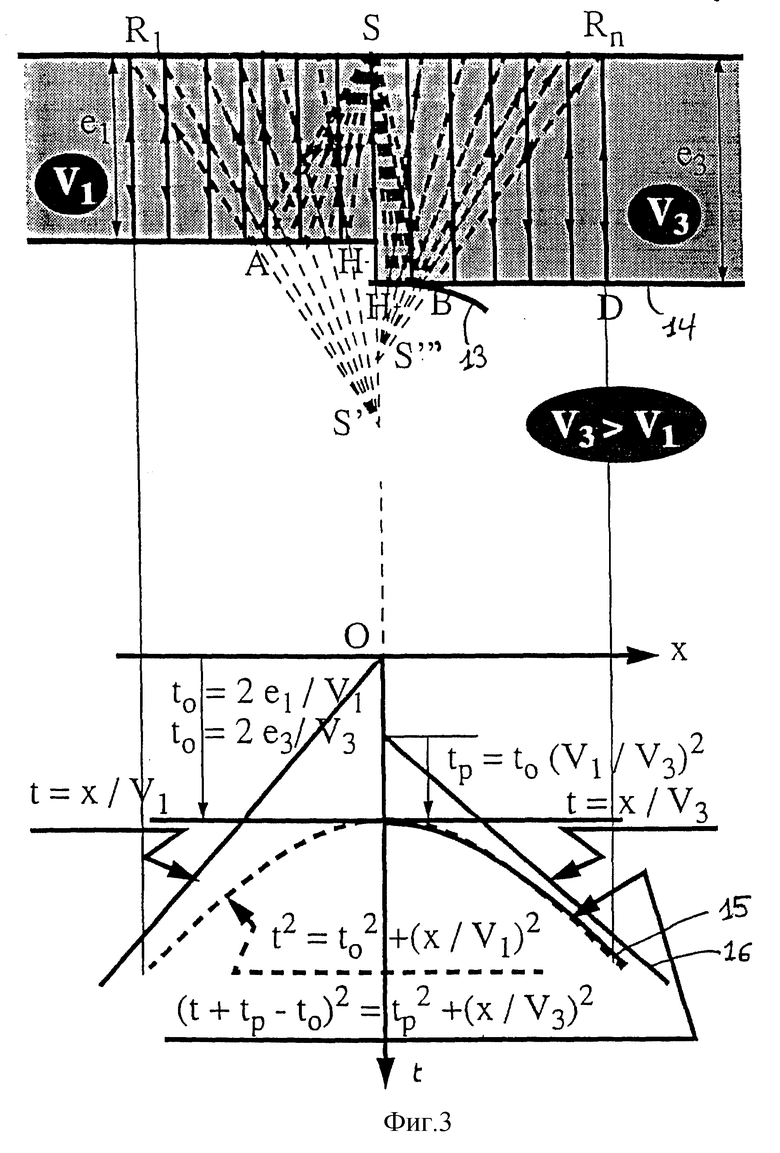
фиг. 3 аналогична фиг. 2 со скоростями V3 и V1, отличными от скоростей, используемых на указанной фиг. 2;
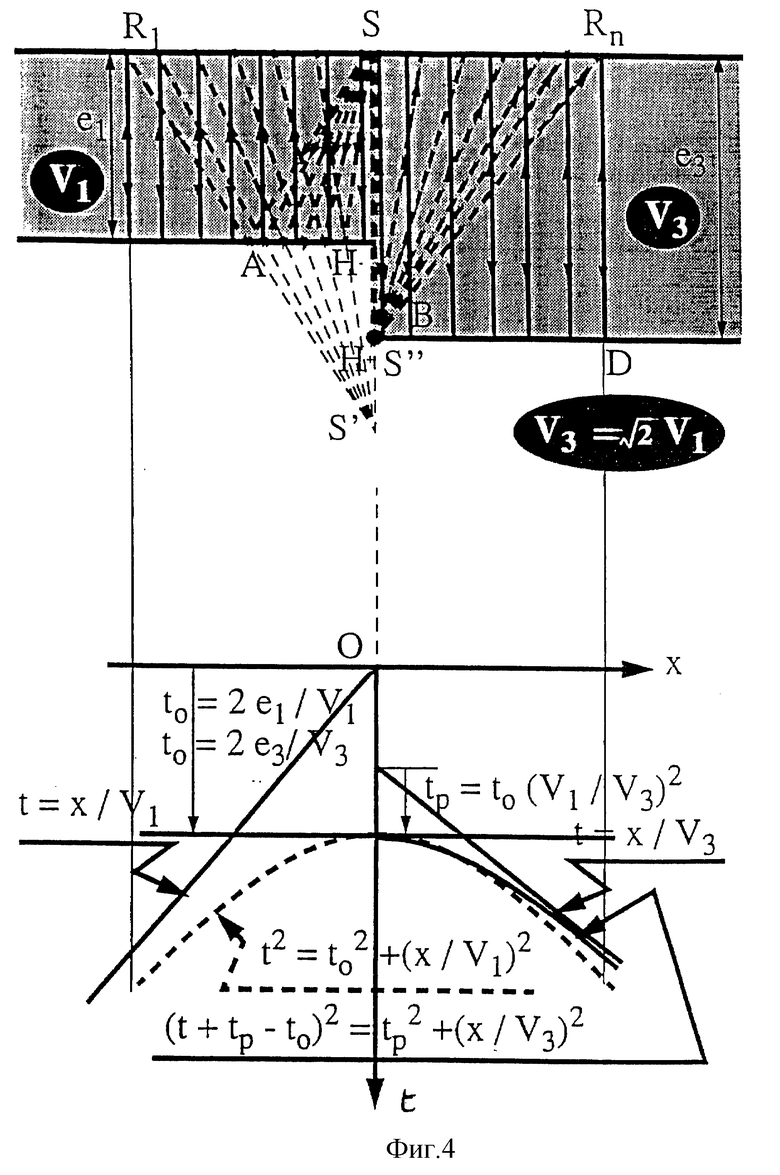
фиг. 4 аналогична фиг. 3 с заранее заданной величиной одной скорости по отношению к другой 
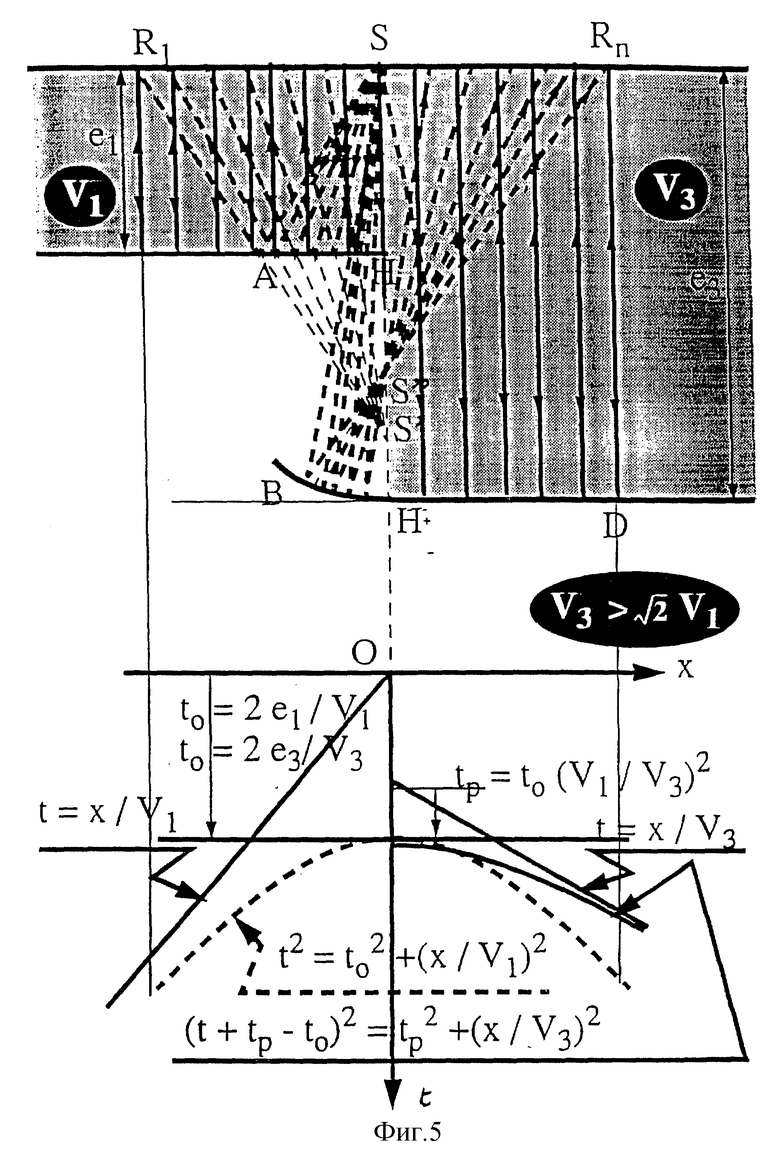
фиг. 5 аналогична фиг. 4 с той лишь разницей, что скорость 
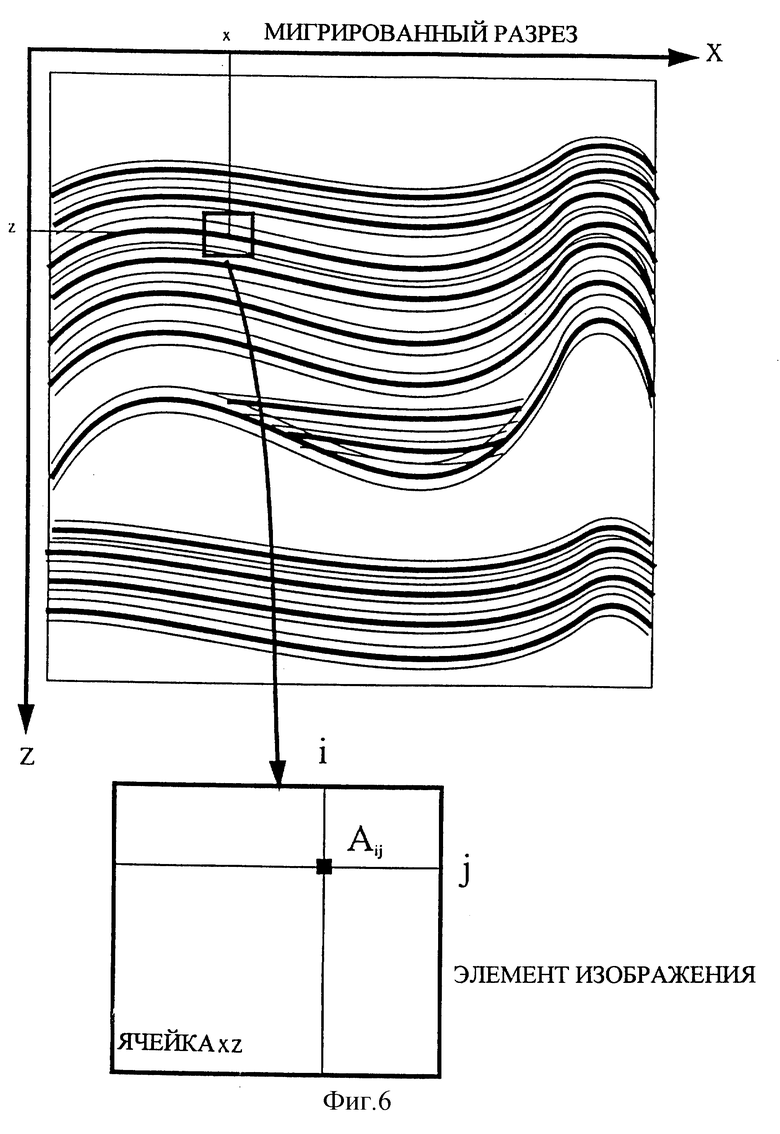
фиг. 6 - это схематическое изображение мигрированного по глубине разреза сейсмических событий;
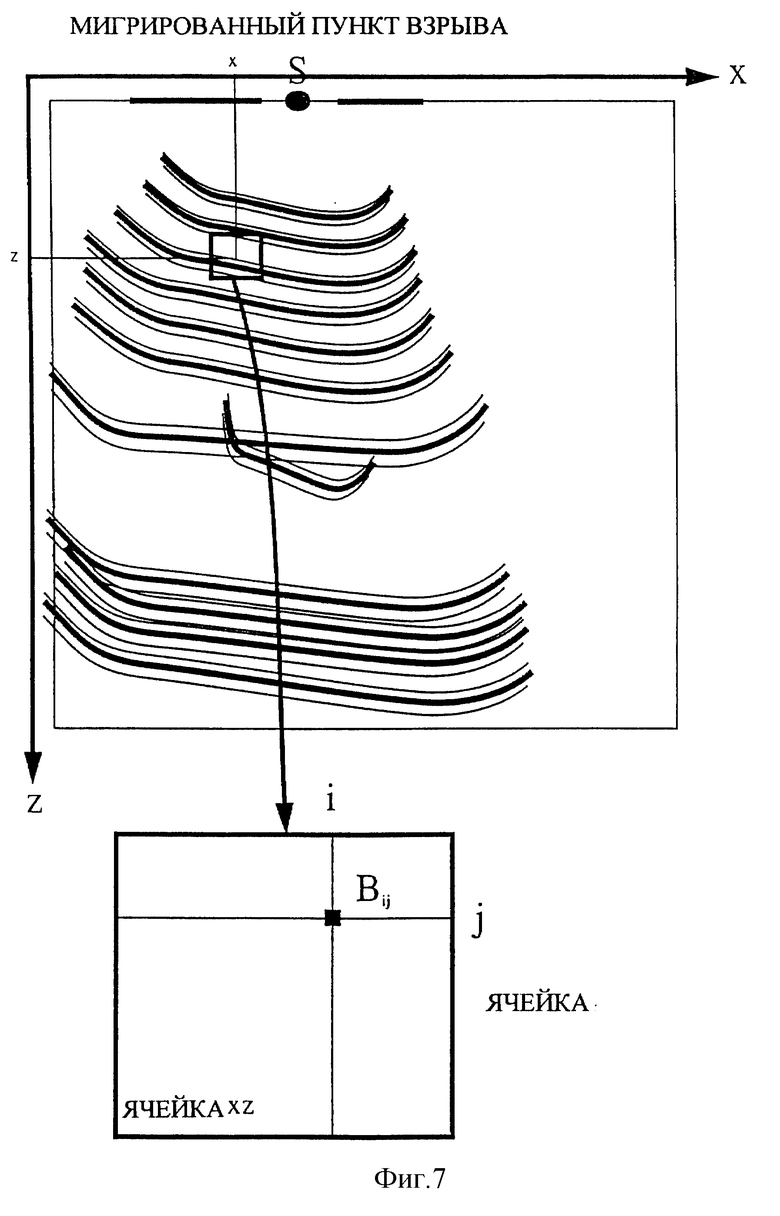
фиг. 7 - схематическое изображение миграции лучей, исходящих из пункта взрыва в том же поле скоростей, которое использовано для изображения на фиг. 6;
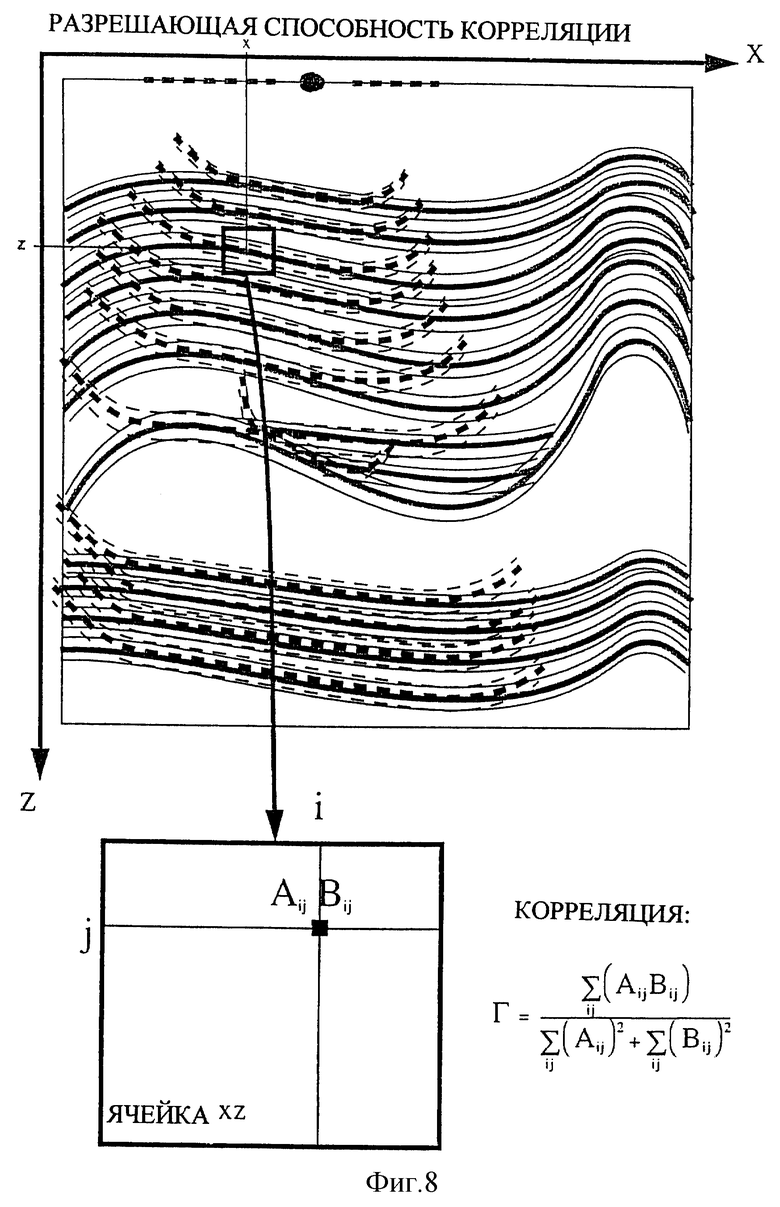
фиг. 8 - схематическое изображение корреляции мигрированных изображений фиг. 6 и 7;
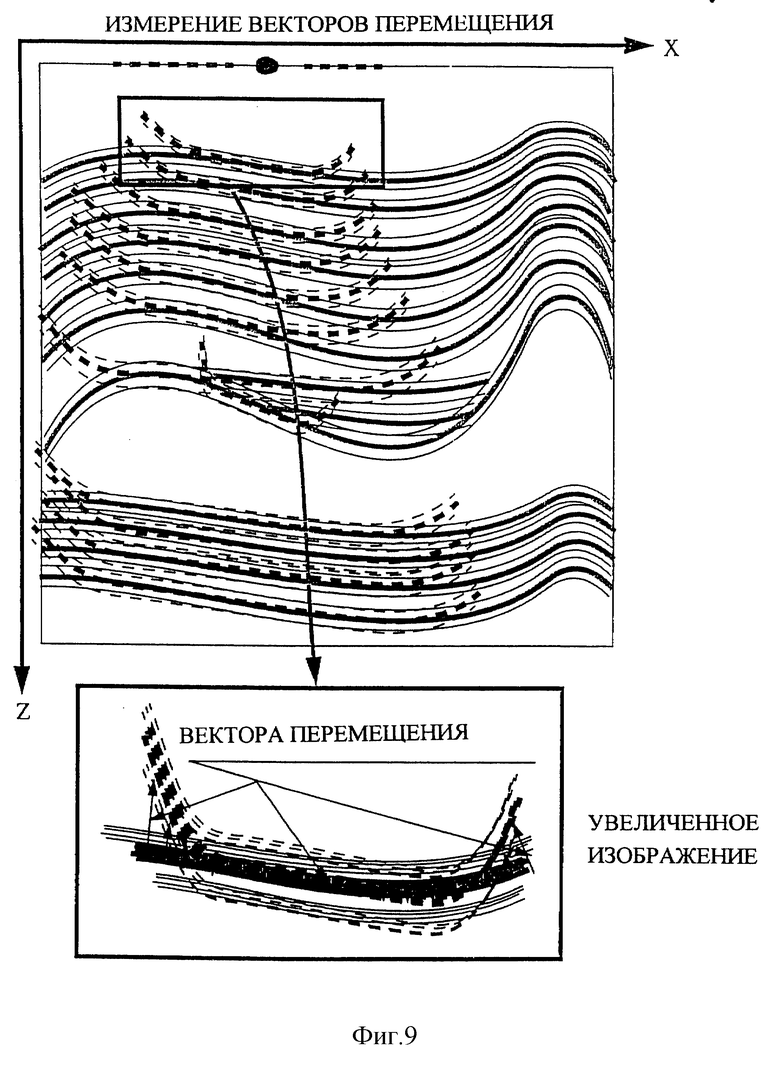
фиг. 9 - схематическое изображение векторов перемещения корреляции, изображенных на фиг. 8;
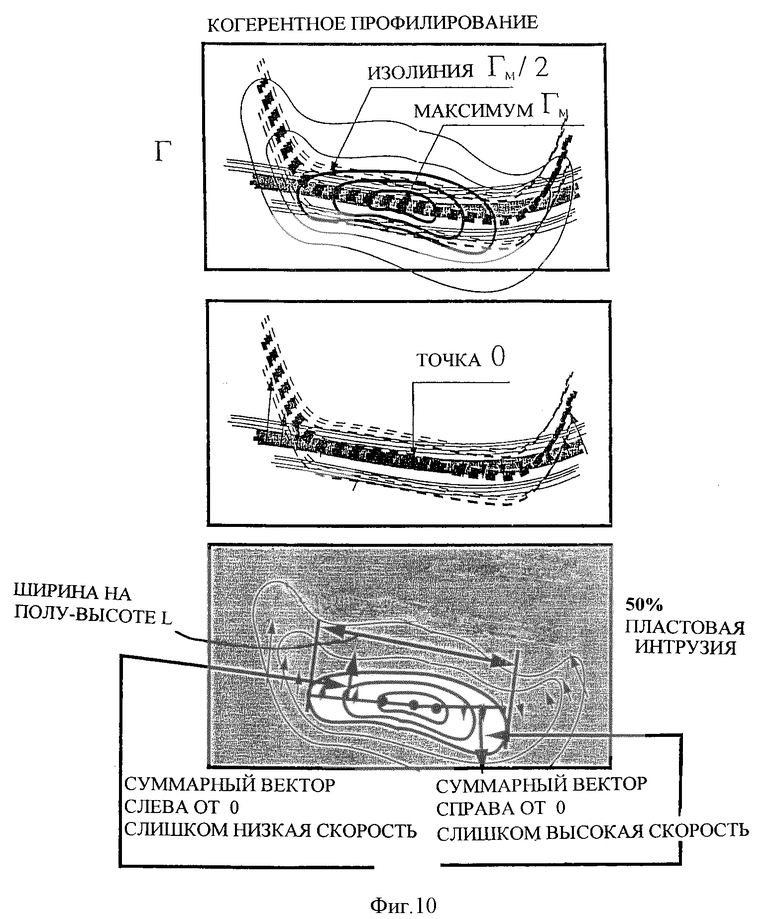
фиг. 10 - схематическое изображение линий равной величины корреляции;
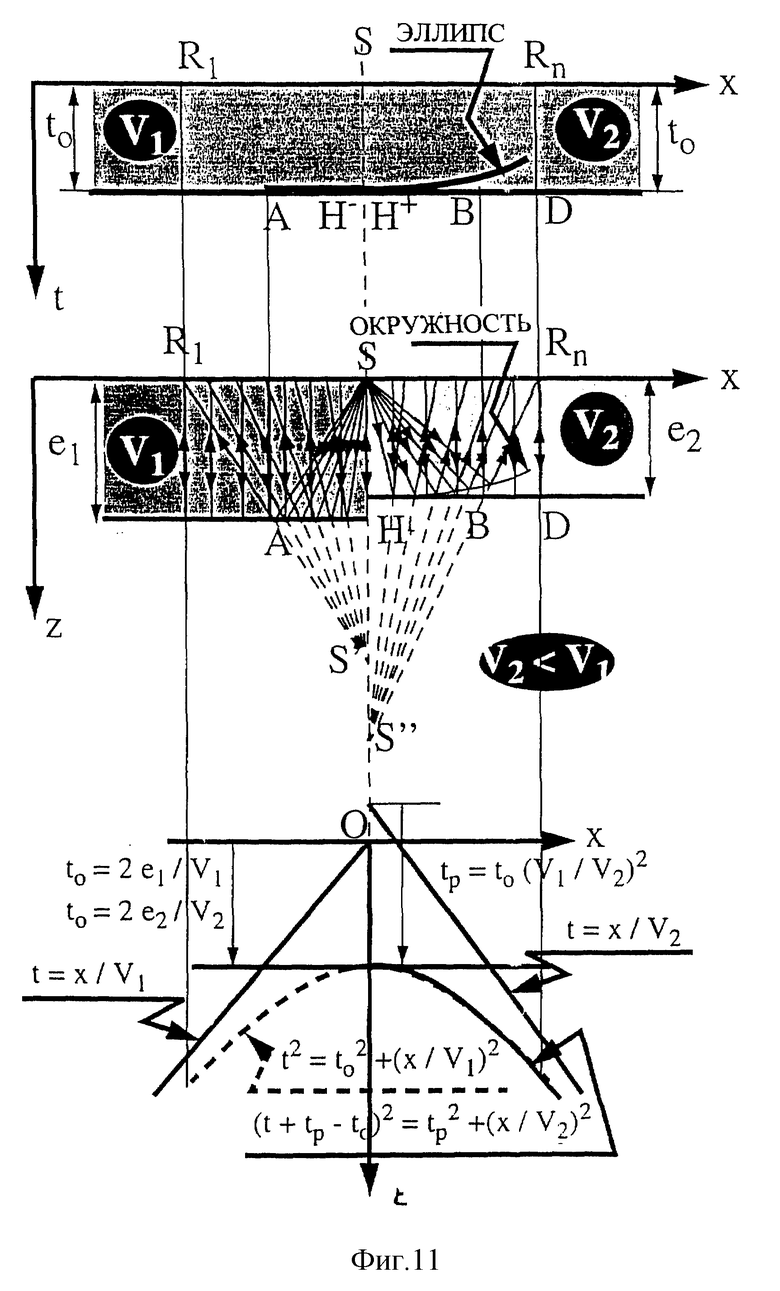
фиг. 11 и 12 - схематические изображения, мигрированные по времени.
Простой, теоретически вычисляемый пример способа, осуществляемый в соответствии с настоящим изобретением, приводится со ссылкой на фиг. 1 при рассмотрении приповерхностного пласта 1, ограниченного поверхностью 2 и плоским горизонтальным горизонтом 3. Пункт S взрыва и приемники R1 - Rn, размещенные по обеим сторонам от пункта S взрыва, установлены с равными или неравными смещениями. Как видно на фиг. 1, пункт S взрыва находится в центре модели и испускает волны вдоль лучей, которые после отражения от горизонта или рефлектора 3 принимаются и записываются приемниками R1 - Rn. Часть рефлектора, на которую падают волны от пункта S взрыва, представляет собой сегмент AB. Предполагается, что волны распространяются в пласте с постоянной скоростью V1 и что луч нулевого смещения SHS также был записан.
Лучи от r1 до rn, которые исходят из пункта S взрыва и достигают приемников R1 - Rn, после отражения от рефлектора 3 образуют первый набор несуммарных следов, в то время как лучи, соответствующие постсуммарным следам, состоят из лучей от R'1 до R'n, которые исходят от каждого из приемников R1 - Rn и падают перпендикулярно на рефлектор 3. В этом геометрическом случае та часть рефлектора CD, на которую падают лучи R'1 - R'n, больше, чем часть AB.
На фиг. 1 также представлены временные изображения, полученные от лучей, и R'1 - R'n, которые описаны выше.
Постсуммарное изображение пункта S взрыва представляет собой гиперболу 4, которая в системе координат Xot описывается уравнением
t2(X) = t0 2 + X2/V1 2, (1)
в котором t0 = 2e1/V1, где e1 - это расстояние, отделяющее поверхность 2 от рефлектора 3, и X это расстояние Sri.
Гипербола 4 имеет центр симметрии, совпадающий с началом O координат, и вершину, находящуюся на временном расстоянии t0 от O, при этом асимптоты 5 и 6 указанной гиперболы 4 задаются уравнением t = ± X/V1.
Постсуммарное временное изображение части CD, соответствующее части секции R1Rn, представляет собой сегмент 7 горизонтальной линии, которая находится в той же системе координат Xot и задается уравнением
t(X) = t0 для всех X. (2)
Два набора лучей, представленных в верхней части фиг. 1, являются мигрированными по глубине в поле скоростей, определенными полубесконечной средой ниже поверхности 2 и имеющими скорость V2 < V1. Это представлено в верхней части фиг. 2, где две глубинные миграции со скоростями V1 и V2 наложены одна на другую. Постсуммарная миграция следов для скорости V2 представлена горизонтальным глубинным горизонтом 8, а предсуммарная миграция пункта S взрыва (лучи, которые исходят от источника S и записаны приемниками) представляет собой дугу 9 круга, которая касательна по отношению к линии 8 и радиус которой может быть вычислен.
Временные изображения этих миграций представлены в нижней части фиг. 2, при этом постсуммарное временное изображение, очевидно, представляет собой горизонтальную линию 10, пролегающую на глубине e2, которая определяется уравнением
e2 = V2t0 = V2/V1e1, (3)
где t0 = 2e1/V1, предсуммарное изображение представляет собой гиперболу 11 с асимптотой 12, имеющую наклон X/V2, так как миграция выполняется со скоростью V2. Эта гипербола описывается уравнением типа PSCAN, которое определено в некоторых публикациях г-на Эрика де Базелера (Eric de BAZELAIRE) и имеет вид
(t + tp - t0)2 = tp 2 + X2/V2 2. (4)
В пар аксиальной аппроксимации, уравнения (1) и (4) расширены в степени X, и когда первые два условия в этих двух расширениях идентифицированы, то получается, что:
tp = t0V1 2/V2 2.
Из этого следует, что tp больше, чем t0. Гипербола PSCAN, определенная таким образом, представляет точку S'', которая представляет собой изображение точки S, являющейся отражением от зеркала, которое требуется определить. Оно находится на глубине P, которая определяется уравнением
P = V2t0 = t0V1 2/V2.
Зеркало, которое должно быть воспроизведено, является одним из зеркал, которые дают изображение S'' от точки S, которое имеет полюс на расстоянии e2 = V2t0. Поэтому оно определяется следующей объединенной формулой:
(1/-V2)(1/HS'' - 1/R) = (1/+V2)(1/HS - 1/R). (5)
Так получается в связи с тем, что для зеркала скорость возвращения имеет величину скорости в прямом направлении с измененным знаком. Заменив HS и HS'' в уравнении (5) их значениями, можно определить величину радиуса кривизны мигрированной поверхности раздела. Она определяется с помощью уравнения (6)
R = e2(2V1 2 - V2 2)/2(V2 2 - V1 2).
Можно заметить, что R является отрицательной величиной и его модуль больше, чем e2. Это дает изображение, представленное на фиг. 2, с формой 9 рассеивающего мениска, имеющего вогнутую по направлению вверх поверхность.
Этот результат также можно интерпретировать, установив, что, так как луч SBRn длиннее, чем луч RnDRn, разность или несоответствие в длине возникает из-за миграции со слишком малой скоростью, из этого можно сделать вывод, что B находится выше D. Исследование формулы (6) показывает, что если перемещение выполняется с правильной скоростью V1 = V2, то радиус R бесконечен, что означает, что два мигрированных изображения наложены одно на другое.
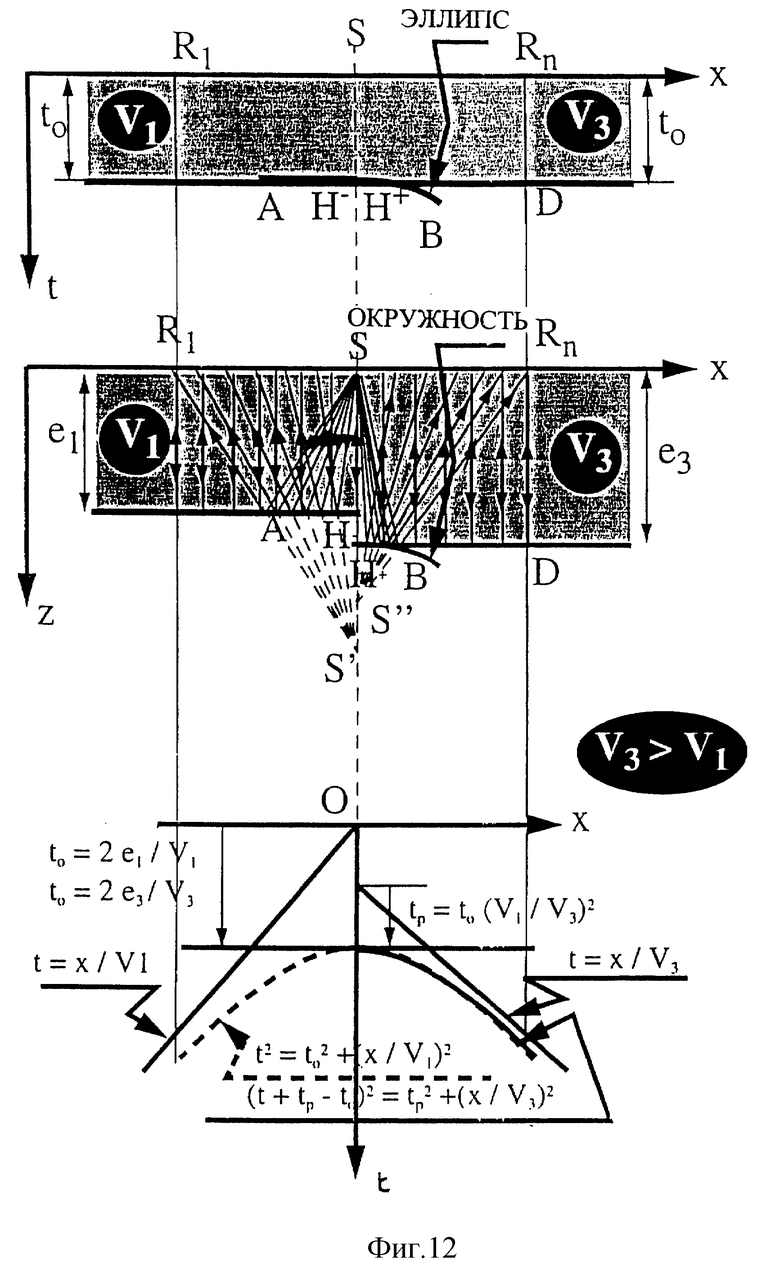
Когда перемещение выполняется в среде со скоростью V3, которая больше, чем V1 (фиг. 3), радиус R становится положительным для таких величин скоростей, которые
В этом случае предсуммарное мигрированное изображение первого набора следов состоит из рассеивающего мениска 13, который имеет вогнутость по направлению вниз и расположен по касательной к линии 14, представляющей постсуммарное мигрированное изображение второго набора следов. Временные изображения этих глубинных миграций представлены в нижней части фиг. 3.
Уравнение гиперболы 15, представляющей предсуммарную глубинную миграцию, имеет вид
(t + tp - t0)2 = tp 2 + (X/V3)2
и асимптота 16 имеет наклон t = X/V3.
Изображение S в этом случае представляет собой S''', а точка B находится ниже D.
В данном отдельном случае (фиг. 4), в котором  предсуммарная миграция пункта S взрыва дает точку дифракции с радиусом кривизны R = 0. И, наконец, для таких величин скоростей, как
предсуммарная миграция пункта S взрыва дает точку дифракции с радиусом кривизны R = 0. И, наконец, для таких величин скоростей, как  существует изменение в вогнутости мениска с радиусом кривизны, имеющим модуль, меньший, чем толщина e2.
существует изменение в вогнутости мениска с радиусом кривизны, имеющим модуль, меньший, чем толщина e2.
Вновь рассматривая фиг. 2, можно заметить, что в точке H, лежащей вертикально на одной линии с S, два изображения наложены одно на другое и они всегда будут независимы от используемого поля скоростей и от геометрии приповерхностной зоны. Это происходит потому, что лучи, падающие на точку H, являются одними и теми же для двух миграций. Они представляют собой радиусы, перпендикулярные к поверхности зеркала в точке H. Амплитуда корреляции в точке H таким образом проходит через абсолютный максимум. Пространственное разделение между двумя мигрированными горизонтами проходит через нулевое значение в этой точке. В случае, представленном на фиг. 2, и при движении от точки H влево (H-) или вправо (H+), следуя за глубинным горизонтом постсуммарного изображения, можно заметить, что глубинный горизонт предсуммарного изображения сдвигается по обеим сторонам тангенциально вверх.
Для измерения несоответствий между двумя изображениями используется способ поверхностной корреляции, который принимает во внимание указанные изображения путем описания, основанного на описании их элементов изображения.
При рассмотрении реальных данных сейсмические события распределяются за пределами слепых зон по всей поверхности глубинного разреза. На фиг. 6 показан разрез, мигрированный по глубине и имеющий этот тип распределения. Толстые линии представляют собой положительные центральные лопасти мигрированного сигнала пункта взрыва. Лопасти первой стороны были представлены тонкими линиями. Каждая непрерывная линия (толстая линия) представляет собой одно сейсмическое событие. По всему элементарному окну, представленному в виде черного квадрата, имеющего такой размер, что по меньшей мере одно сейсмическое событие находится в пределах его площади, далее определяется координатная сетка элементарных квадратов, которые называются элементами изображения, а затем в каждом из них определяется элементарная амплитуда Aij. Эта амплитуда представляет собой среднюю величину всех образцов элемента изображения. Размер элементарного окна может быть фиксированным. Это элементарное окно, называемое здесь и далее ячейкой, совмещено по центру с координатами XZ. Таким образом оно затем последовательно будет перемещаться по всей поверхности глубинного разреза.
Фиг. 7 представляет собой глубинную миграцию пункта S взрыва в том же поле скоростей, что и на фиг. 6. Эта глубинная миграция содержит кромочные эффекты каждого горизонта. Что касается предыдущего изображения, определяется еще одно элементарное окно на этом разрезе, в котором определяется элементарная амплитуда Bij, представляющая собой среднюю величину амплитуд элементов изображений второго изображения, которые включены в указанное другое окно. При этом становится возможным определить коэффициент Гxz корреляции путем соединения двух элементарных окон или ячеек, каждая из которых принадлежит к одному из изображений и имеет один и тот же центр, при этом величина Г вычисляется по следующей формуле
в которой суммы (Σ) распространены на все элементы изображения двух соединенных окон.
Фиг. 8 иллюстрирует совмещение двух элементарных окон, имеющих одно и то же положение, и вычисление корреляции Г для этого совмещения. Два предыдущих глубинных разреза накладывали один на другой, что делает возможным увидеть аналогичные и различающиеся части каждого из разрезов.
Второй этап заключается в вычислении и нанесении линий одинакового значения корреляции Г, которые называются здесь и далее как изолинии равного значения. Эти линии находятся одна внутри другой, как это показано на фиг. 10. Максимальная величина Г, обозначаемая как Гм, лежит внутри этих линий, и ее координаты x и z определены. Вычисляются изолинии равного значения, определенные как половина этой максимальной величины, которые обозначаются как изолинии Гм/2. Каждый горизонт окна имеет положение и Гм-позицию и величину, а также поверхность, определенную ее изолинией Гм/2.
Третий этап заключается в измерении сдвигов между двумя изображениями для определения по ним векторов перемещения. Они измеряются по всей поверхности, которая является общей для двух мигрированных изображений, и лежит в пределах каждой из изолиний равного значения Гм/2.
Исходная точка представляет собой пару ячеек, имеющих одно и то же положение, как и те, что показаны на фиг. 8. Одна из двух ячеек имеет смещение по отношению к другой в определенном направлении, например в горизонтальном направлении, и эта же самая ячейка затем смещена в ортогональном направлении на величину, требуемую для того, чтобы корреляция Г прошла через местный максимум. Таким образом определяется элементарный вектор перемещения, так же как и векторы, представленные на фиг. 9, и они нанесены в виде стрелок. Эта операция повторяется для всех положений, необходимых для правильного определения двух суммарных векторов, слева и справа от точки нулевого перемещения, определенных идентичными лучами, общими для двух мигрированных изображений, так и для точек максимальной корреляции Гм (фиг. 10).
В нижней части фиг. 9 представлено увеличенное изображение общей части двух глубинных разрезов, изображенных на фиг. 6 и 7. Векторы перемещения представлены для каждой желаемой позиции. Такая же увеличенная часть представлена на фиг. 10. Вверху нанесены изолинии равной величины корреляции местного горизонта. В центре представлены векторы перемещения и размещена точка 0 нулевого перемещения, которая совпадает с точкой максимальной корреляции Гм. В нижней части фиг. 10 представлена поверхность, получаемая из 50% пластовой интрузии путем удаления поверхностей, имеющих изолинии равной величины с амплитудой меньше Гм/2. Вдоль горизонтов изолиния равной величины Гм/2 имеет длину, которая называется здесь и далее полной шириной при половине максимума L.
Эта полная ширина при половине максимума L является характеристикой ошибки, сделанной по скорости перемещения. В частности, она проходит через максимум, когда скорость миграции определена точно, и она уменьшается, когда скорость миграции двигается вверх или вниз от правильного значения. Измерение двух величин скорости, которое уменьшает эту полную ширину, при половине максимума L, уменьшается на 10%, дает оценку, не искаженную геометрией, ошибки по скорости миграции.
Для того чтобы оценить боковые градиенты скорости миграции и знак ошибки по скорости миграции, размещенной поблизости от точки 0, берется векторная сумма, отдельно слева и справа от этой точки 0, векторов перемещения, лежащих между указанной точкой 0 и кривой корреляции, представляющей изолинию равного значения Гм/2. Для каждой стороны эта векторная сумма дает результирующий вектор, обозначаемый ранее, здесь и далее как суммарный вектор. Если пучки лучей, исходящие из пункта S взрыва, и лучи, нормальные к зеркалу, не имеют скрытых фокусов, тогда, когда суммарный вектор ориентирован в направлении нормального луча, как один из указанных слева на фиг. 10, местная скорость миграции будет слишком малой (или слишком медленной). Если суммарный вектор ориентирован в направлении, противоположном направлению нормального луча, как один из векторов, изображенных справа на фиг. 10, местная скорость миграции будет слишком высокой (или слишком быстрой). Правило знака изменяется на противоположное каждый раз, когда пучки лучей проходят через фокус вращения. Равное количество фокусов не изменяет вышеуказанное правило. Когда два суммарных вектора имеют противоположные знаки, то это означает, что скорость содержит боковую компоненту, обозначаемую здесь и далее как боковой градиент скорости, и что скорость, используемая для миграции, является точной в точке 0, то есть вдоль нормального луча.
Настоящее изобретение дает возможность оценить этот боковой градиент скорости следующим образом.
Если V0 - скорость перемещения в точке 0, то градиент скорости может быть выражен формулой:
V = V0 + kx,
где k - это положительная или отрицательная постоянная, которую следует определить, x - это направление, перпендикулярное к нормальному лучу в плоскости наклона.
Величина k является фиксированной априорно, что определяет поле скоростей миграций в рассматриваемом пласте, и миграцию, осуществляемую в соответствии с настоящим изобретением в этом поле скоростей. Миграции повторяют до тех пор, пока суммарные векторы, слева и справа от точки 0, не аннулируются. Величина k, которая слишком велика, меняет знак двух суммарных векторов.
Таким образом определяется величина k, так же как и соответствующее поле скоростей в зоне анализа.
Способ, описанный выше, является итеративным для каждого последующего пласта, начиная от первого рассекаемого пласта.
Возможно также использовать способ линейной когерентности независимо с или вне зависимости от способа поверхностной когерентности.
Способ измерения линейной когерентности включен в вышеупомянутый способ в случае, когда требуется очень высокая точность оценки скорости миграции. В определенном смысле способ линейной когерентности играет роль, отводимую верньеру при линейных измерениях. В частности, после достижения конвергенции способом поверхностной когерентности способ, измеряющий векторы перемещения и описанный выше, заменяется на еще более чувствительный способ, дающий высокую степень точности результатов и который состоит в определении изолированного события в двух мигрированных по глубине разрезах, представленных на фиг. 6 и 7, в вычислении расстояния между выявленными событиями, используя известные программы для вычисления остаточных статических исправлений. Эти программы вычисляют поперечные корреляции между двумя следами, соответствующими каждой паре из двух линий элементов изображения элементарных ячеек, перпендикулярно к выявленным событиям, затем они идентифицируют первый боковой пик каждой функции поперечной корреляции, положение которых описывает длину вектора местного перемещения. Направление этого вектора определяют хронологией двух определенных событий.
Для того чтобы еще более улучшить местное измерение, можно скорректировать предел зоны суммирования для векторов перемещения, слева и справа от 0, с тем, чтобы увеличить точность измерения суммарных векторов. Для этого на основе используемого поля скоростей миграций и двух идентификаций событий, до суммирования и после суммирования, используют программу отслеживания лучей для вычисления двух ограничивающих лучей каждого из набора лучей, например лучей SHS и SBRn, изображенных на фиг. 2 и 5. Более точные пределы интеграции для векторов перемещения затем приведены длинами HB, слева и справа.
Набор методик, представленных выше, применяется для всех пар разрезов, содержащих мигрированные разрезы, и по меньшей мере один мигрированный пункт взрыва, зная, что в тех случаях, когда существует множество пунктов взрыва в данном разрезе, они не должны оказывать влияние один на другой, чтобы не искажать результаты измерений. Сопоставление различных пунктов взрыва по различным плоскостям миграции создает возможность, если это необходимо, перемещать пункты взрыва без взаимного влияния.
Фиг. 11 и 12 относятся к дифференциальной временной миграции, которая может быть применена не для разреза, мигрированного по глубине, а к постсуммарному разрезу, мигрированному во времени, и таким же образом к разрезу, полученному в результате миграции пункта взрыва во времени, в том же поле скоростей.
На фиг. 11 представлен случай, изображенный на фиг. 2, так сказать случай глубинной миграции горизонтального плоского пласта со скоростью V2 миграции, которая меньше, чем действительная скорость V1 пласта, в сравнении со случаем миграции в правильном поле скоростей V1. Две наложенные временные миграции, выполненные в одних и тех же полях скоростей миграции, что и для вышеупомянутых глубинных объектов, представлены выше этого изображения. Изображение, мигрированное во времени, получают путем деления вертикального расстояния точек центрального изображения на используемую скорость местной миграции. Слева и справа от S эта операция дает одно и то же время t0 для постсуммарного мигрированного изображения. Пункт взрыва, мигрированный с правильной скоростью слева от S, также дает отраженную зеркальную часть, совпадающую с постсуммарным изображением этого зеркала. И наоборот, когда в ходе миграции с неправильной скоростью справа от S, пункт взрыва дает эллипс во временной миграции вместо окружности в глубинной миграции. Этот эллипс расположен касательно при H+ по отношению к постсуммарному изображению, мигрированному во времени. Поэтому при временной миграции так же, как и при глубинной миграции, несомненно получается мениск.
На фиг. 11 и 12 показано, что поведение этого мениска при временной миграции по отношению к несоответствию скоростей миграции, по отношению к действительной скорости такое же, как и при глубинной миграции. Оно меняет знак в то же самое время, как от скоростного несоответствия.
Конечно, набор следов с постоянным смещением в соответствии с настоящим изобретением может состоять из суммарных следов (нулевое смещение) или из элементарных следов с заранее заданным смещением, которое соответствует смещению, отделяющему пункт S взрыва от первого приемника R1, но возможно установить независимое, произвольное смещение и, в частности, максимальное смещение, отделяющее пункт S взрыва от последнего приемника Rn.
Миграция двух наборов следов или лучей, к которым относится настоящее изобретение, выполняется по тому же алгоритму, например, что и миграция по алгоритму КИРСХОФФА (KIRSCHOFF).
Использование: сейсмология при обработке сейсмических данных. Сущность: используют пункт S взрыва, связанный с приемниками (R1-Rn), размещенными со смещениями. В заданном диапазоне скоростей первый набор следов, полученных от пункта взрыва и регистрируемый приемниками, и второй набор следов с постоянным и коллинеарным смещением по отношению к первому набору мигрируют так, чтобы получить два мигрированных изображения части участка, соответствующего указанным двум наборам следов. Эти два изображения являются коррелированными с помощью пространственной двумерной корреляции. В результате этого определяется девиация между используемыми миграциями и исследуемой скоростью. Технический результат: повышение эффективности способа за счет получения поля скоростей, близкого к полю скоростей среды. 13 з.п. ф-лы, 12 ил.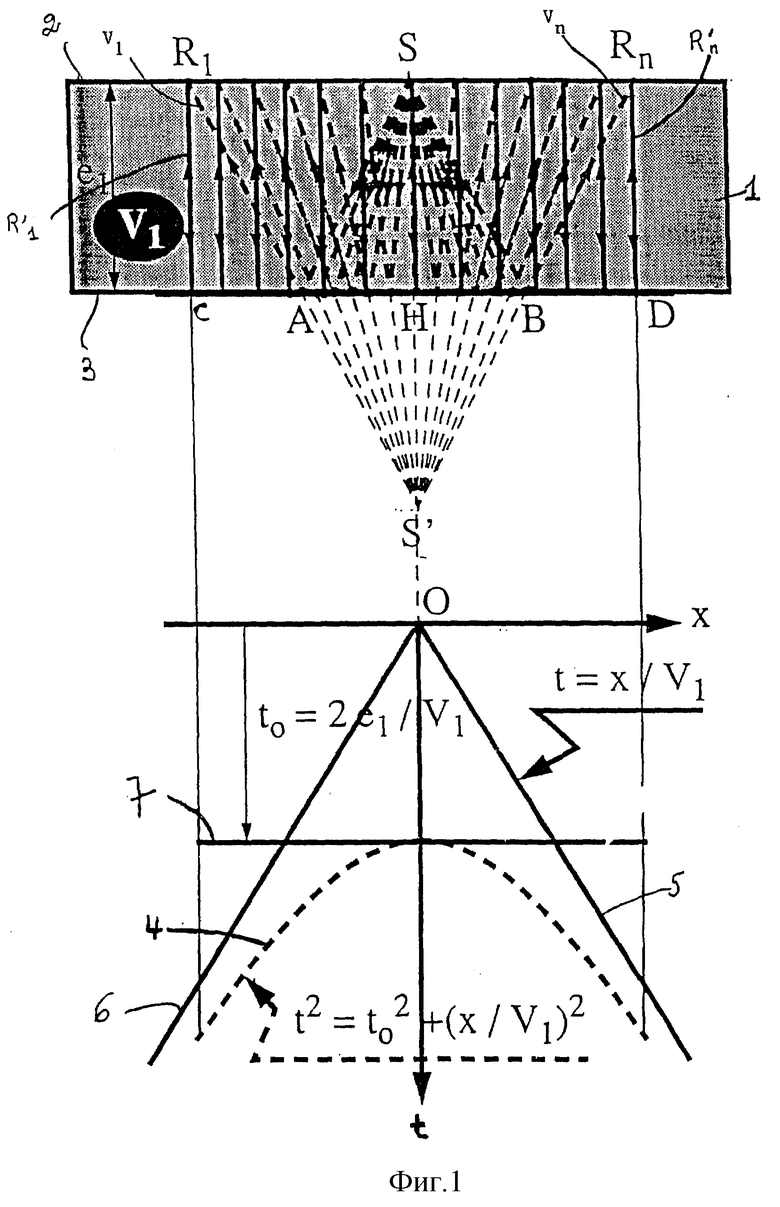
| US 4964086 А, 16.10.1990 | |||
| US 4415999 А, 15.11.1983 | |||
| GB 1317765 А, 23.05.1973 | |||
| EP 0442719 А2, 21.08.1991 | |||
| ГАЗОРАССЕИВАЮЩАЯ КАМЕРА | 0 |
|
SU297737A1 |
| СПОСОБ СЕЙСМОРАЗВЕДКИ | 1990 |
|
RU2013791C1 |
