Данное изобретение относится к способу и устройству управления отслеживанием, в которых регулируют скорость ведущего вала путем использования команд на изменение скорости ведущего вала в устройствах записи/воспроизведения изображения, в которых значение ошибки отслеживания учитываются для последующего правильного отслеживания.
При плохом отслеживании в устройствах /записи/ воспроизведения изображения, таких как видеомагнитофон или видеокамера (камкодер), на экране возникает плохое изображение в виде появления дрожания. Поэтому для достижения хорошего изображения на экране необходимо хорошее управление отслеживанием.
В режиме управления отслеживанием головка регулируется точно для развертки заданной дорожки, чтобы обеспечить максимальный выход огибающей во время воспроизведения.
Для управления отслеживанием используется раздельный управляющий сигнал. В бытовых видеомагнитофонах отслеживание осуществляется использованием управляющего сигнала, который записывается на дорожку управления ленты неподвижной головкой.
В 8-миллиметровых видеомагнитофонах управляющий сигнал, называемый автоматическим обнаружением дорожки (АОД), который имеет четыре вида различных частот, записан на дорожку ленты и используется затем для воспроизведения таким образом, что ошибка отслеживания, т.е. степень отклонения от дорожки, развертку которой обеспечивает подвижная головка, обнаруживается и уменьшается.
При этом обнаруженная ошибка отслеживания может быть минимизирована управлением скоростью вращения двигателя ведущего вала. Таким образом, предмет управления отслеживанием - это скорость вращения двигателя ведущего вала.
Ниже описан обычный способ управления отслеживанием с обращением к приложенным чертежам.
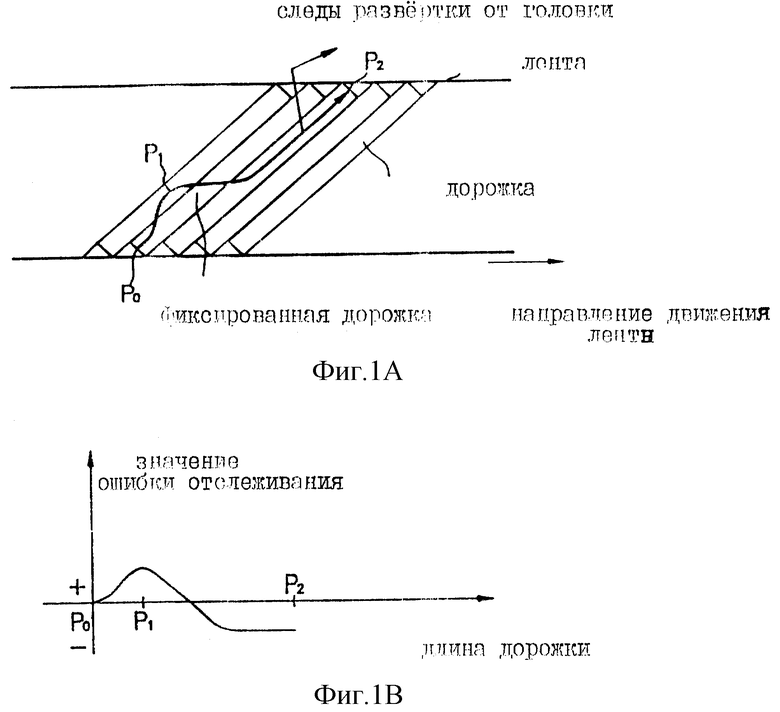
Фиг. 1A и 1B показывают связь между следами развертки (считывания) от головки и ошибкой отслеживания обычного видеомагнитофона, в котором, для удобства, появление положительной ошибки показывает, что головка расположена после дорожки.
Ниже объясняется основной принцип управления отслеживанием. На фиг. 1, когда головка находится перед заданной дорожкой, т.е., когда головка расположена на дорожке уровня P1, лента замедляется путем уменьшения скорости двигателя ведущего вала. Когда головка находится после заданной дорожки, т. е. когда головка расположена на дорожке уровня P2, лента ускоряется путем увеличения скорости двигателя ведущего вала.
Основной принцип управления отслеживанием также присущ данному изобретению, как и известному способу.
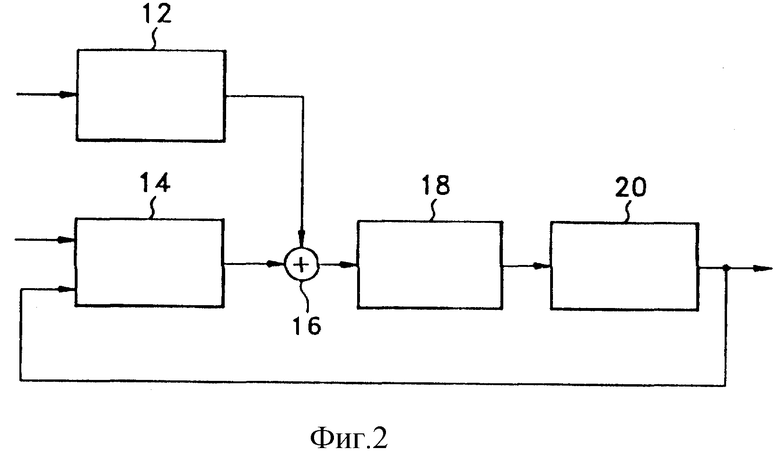
Известная структура системы автоматического регулирования скорости ленты для управления отслеживанием изображена на фиг. 2.
На фиг. 2: сигнал управления скоростью двигателя 20 ведущего вала, подаваемый на возбудитель 18 двигателя ведущего вала, задает величину управления скоростью ведущего вала, определенную в контроллере 12 отслеживания, и величину управления отслеживанием, определенную в контроллере 14 ведущего вала соответственно, а затем суммируют два названных значения в сумматоре 16.
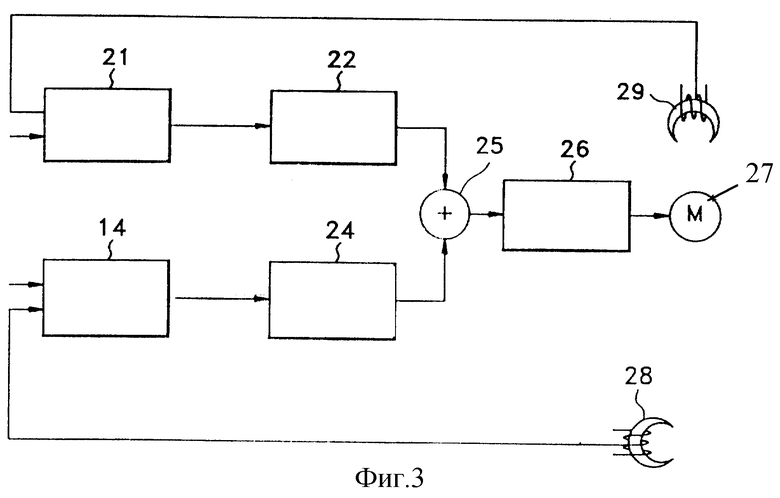
Фиг. 3 показывает вариант выполнения изобретения, в котором система автоматического регулирования скорости ленты, показанная на фиг. 2, использована в бытовом видеомагнитофоне.
Здесь значение управления скоростью ведущего вала вычисляется в предположении, что это задана обычная дорожка, и команда (f) скорости ведущего вала, соответствующая обычной скорости вращения двигателя ведущего вала, необходимой, когда головка верно проходит указанную обычную дорожку, является опорным значением. Кроме того, опорное значение и рабочая скорость двигателя 27 ведущего вала, фактически измеренные частотным датчиком 29, когда двигатель 27 ведущего вала вращается, сравниваются в детекторе 21 ошибки скорости ведущего вала. Затем значение ошибки, вычисленное из этого сравнения, преобразуется в значение, управляющее скоростью двигателя 27 ведущего вала в контроллере 22 скорости ведущего вала, которое не связано со значением сигнала управления отслеживанием для компенсации ошибки отслеживания.
Записывающий импульс, синхронизированный началом дорожки (в дальнейшем "управляющий импульс"), записывается на дорожку управления. Кроме того, значение ошибки отслеживания ведущего вала выделяется из значения с фазового компаратора 23 ведущего вала посредством фазового сравнения между управляющим импульсом, который воспроизводится неподвижной головкой 28 (называемой "управляющей головки"), и переключающим импульсом головки, которым обеспечивается установленная заранее частота. Затем значение ошибки скорости умножается на заданный коэффициент усиления или дифференцируется. Или интегрируется так, чтобы быть выделенной как значение управления отслеживанием ведущего вала, т.е. заданное физическое значение в фазовом контроллере 24 ведущего вала для последующего выполнения регулирования двигателя ведущего вала с целью управления отслеживанием.
Значение сигнала управления скоростью ведущего вала контроллера 22 скорости ведущего вала и значение управления отслеживанием фазового контроллера 24 ведущего вала суммируется в сумматоре 25, и двигатель 27 ведущего вала управляется возбудителем 26 двигателя ведущего вала.
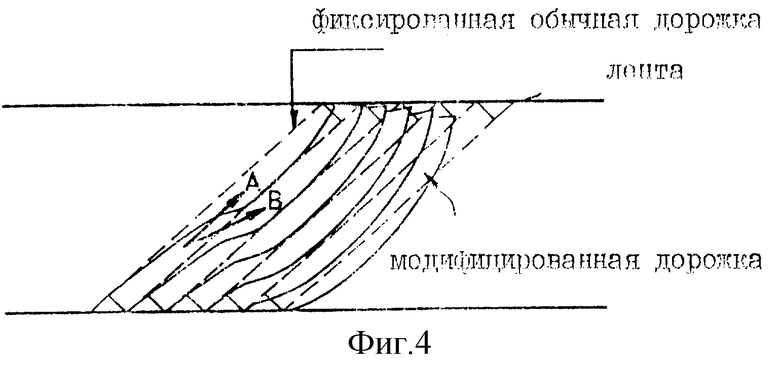
Тем не менее, описанный выше известный способ порождает различные недостатки, когда направление для управления скоростью двигателя ведущего вала и направление для управления отслеживанием различны. Ниже дано объяснение с обращением к фиг. 2 и фиг. 4.
Как можно видеть на фиг. 4 следы головки, по которым работает контроллер 14 скорости ведущего вала, представляют собой обычную дорожку (направление A на фиг. 4), в то время как следы головки, по которым работает контроллер 12 отслеживания, есть модифицированная дорожка (направление B на фиг. 4).
Таким образом, когда направление для управления скоростью двигателя 20 ведущего вала и направление для управления отслеживанием различны, точное отслеживание затруднительно, т.к. контроллер скорости препятствует двигателю 20 ведущего вала изменять режим для уменьшения ошибки отслеживания.
Задача точной регулировки усиления для значения управления в двух вышеуказанных направлениях требует решения. Поэтому усиления контроллера 12 отслеживания и контроллера 14 скорости ведущего вала должно управляться точно. Однако конструкция устройства, которое дополнительно требуется для регулировки усиления, так же как сама регулировка усиления, является сложной. Даже если устройство имеет функцию регулировки усиления, все равно остается проблема совместимости между двумя устройствами, если записывающее устройство и воспроизводящее устройство различны.
Ухудшение следящей части не создает проблем в бытовых видеомагнитофонах или в 8-миллиметровых видеомагнитофонах, если ширина дорожки достаточно велика (58 мкм для бытовых видеомагнитофонов и 21 мкм для 8 миллиметровых). Однако существует проблема ухудшения характеристик в случае цифрового видеомагнитофона, требующего высокой плотности записи, потому что необходимо очень высокое качество отслеживания, если ширина дорожки меньше 10 мкм.
Раскрытие изобретения
Таким образом, объектами данного изобретения являются способ и устройство, которые могут управлять отслеживанием, используя регулировку скорости ведущего вала, в которой учитывается значение сигнала управления отслеживанием, вычисляемое из ошибки отслеживания, вместо использования обычных команд скорости ведущего вала, не учитывающих, как в известных аналогах, ошибки отслеживания в качестве опорного значения, которое используется для вычисления значения сигнала управления скоростью двигателя ведущего вала.
В соответствии с данным изобретением разработан способ управления отслеживанием для устройства записи/воспроизведения изображения, который преобразует возникающую ошибку отслеживания в значение управления скорости ведущего вала и учитывает в выработке возбуждающего сигнала двигателя ведущего вала, причем способ отслеживания включает следующие шаги:
- вычисление значения сигнала управления отслеживанием, при котором выполняют заданную регулировку усиления сигнала ошибки отслеживания и преобразуют ошибку отслеживания с регулируемым усилением в значение управления отслеживанием;
- выработка команд скорости, в процессе чего производят регулировку скорости ведущего вала, в которой учитывается значение сигнала управления отслеживанием;
- определение ошибки скорости, при котором сравнивают команды скорости ведущего вала, затем определяют значение ошибки скорости двигателя ведущего вала; и
- вычисление значения сигнала управления скоростью, при котором выполняют заданную регулировку усиления ошибки скорости и вычисляют значение управления скоростью двигателя ведущего вала, в котором учитывается ошибка отслеживания.
Далее разработано устройство управления отслеживанием для устройства записи/воспроизведения изображения, которое преобразует возникающую ошибку отслеживания в значение управления скоростью ведущего вала, в котором устройство управления отслеживанием содержит:
- контроллер отслеживания, который выдает команды регулируемой скорости ведущего вала по значению сигнала управления отслеживанием, вычисляемому при выполнении заданной регулировки усиления ошибки отслеживания;
- контроллер скорости ведущего вала, который выполняет заданную регулировку усиления по ошибке скорости двигателя ведущего вала, вычисляемой сравнением действительной скорости ведущего вала с опорным значением, т.е. вышеуказанными командами скорости ведущего вала, и выделяет сигнал управления скоростью ведущего вала.
Данное изобретение, которое содержит вышеописанные средства, основано на таком вышеупомянутом основном принципе управления отслеживанием, как обычный способ. При сравнении с обычным способом, в котором значение сигнала управления скоростью ведущего вала раздельно вычисляется из значения сигнала управления отслеживанием, основное значение в том, что значение сигнала управления скоростью ведущего вала данного изобретения зависит от значения ошибки отслеживания (или значение сигнала управления отслеживанием), хотя значение сигнала управления скоростью ведущего вала данного изобретения учитывается в значении ошибки отслеживания (или значении сигнала управления отслеживанием).
Краткое описание чертежей
Вышеуказанные объекты и другие преимущества данного изобретения могут стать более понятными с помощью детального описания предпочтительного выполнения изобретения, с последующим обращением к соответствующим чертежам, на которых:
Фиг. 1A и фиг. 1B показывают связь между следами считывания от головки и ошибкой отслеживания видеомагнитофона;
Фиг. 2 - это блок-схема, показывающая систему автоматического регулирования скорости ленты для известного управления отслеживанием;
Фиг. 3 - показывает пример, в котором система автоматического регулирования скорости ленты, показанная на фиг. 2, используется в бытовом видеомагнитофоне;
Фиг. 4 - показывает в сравнении отслеживание по обычной дорожке и по модифицированной дорожке;
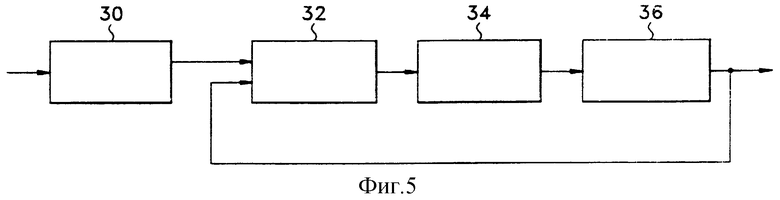
Фиг. 5 - это блок-схема, показывающая структуру устройства управления отслеживанием видеомагнитофона в соответствии с данным изобретением;
Фиг. 6 - это блок-схема, показывающая вариант выполнения устройства управления отслеживанием видеомагнитофона в соответствии с данным изобретением;
Фиг. 7 - это блок-схема, показывающая другой вариант выполнения устройства управления отслеживанием видеомагнитофона в соответствии с данным изобретением;
Фиг. 8 - это блок-схема алгоритма, показывающая порядок выполнения способа управления отслеживанием видеомагнитофона в соответствии с данным изобретением.
Подробное описание изобретения
Данное изобретение будет более подробно описано ниже с обращением к соответствующим чертежам.
Сначала будет объяснен процесс вычисления значения сигнала управления отслеживанием.
В процессе вычисления значения управления отслеживанием ошибка отслеживания умножается на заданный коэффициент усиления или дифференцируется или интегрируется, определяя значение сигнала управления отслеживанием. То есть выполняется пропорциональное интегрально-дифференциальное (ПИД) управление.
При этом физическое измерение, выражающее значение ошибки отслеживания, различно. То есть физическое измерение меняется в зависимости от характеристики вычисляющего устройства, которое вычисляет значение сигнала управления отслеживанием по значению ошибки отслеживания. Например, ошибка отслеживания может объясняться разностью фаз, когда ошибка отслеживания вычисляется сравнением опорного сигнала с фазами управляющих импульсов на ленте, которые считываются головкой, считая, что переключающий импульс головки, обеспечивающий заданную частоту, есть опорный сигнал.
Когда используется опорный сигнал, в котором обеспечены четыре различные частоты, в измерении ошибки отслеживания выражается разность частот.
Далее описан процесс выработки команд скорости.
Этот процесс служит для получения команд скорости ведущего вала, т.е., опорного значения, необходимого для вычисления ошибки скорости двигателя ведущего вала, в которых учитывается значение сигнала управления отслеживанием.
Способы для получения команд скорости ведущего вала, в которых учитывается степень управления отслеживанием, могут быть различны. Один из возможных способов состоит в том, что значение сигнала управления отслеживанием, полученное от регулировки усиления, выполняемой по ошибке отслеживания, и команды скорости ведущего вала, необходимые, когда ошибка отслеживания не принимается во внимание, суммируются, и результат этого используется как команда скорости ведущего вала в процессе выработки команды скорости.
При этом значение ошибки отслеживания не является постоянным, и команды скорости ведущего вала тоже различны по величине.
Кроме того, процесс вычисления значения сигнала управления отслеживанием должен происходить перед процессом выработки команд скорости ведущего вала, в котором вырабатываются команды скорости ведущего вала.
Фиг. 5 - это блок-схема, показывающая структуру устройства управления отслеживанием видеомагнитофона в соответствии с данным изобретением.
Позиции 30, 32, 34 и 36 соответственно означают контроллер отслеживания, контроллер скорости и двигателя ведущего вала, возбудитель двигателя ведущего вала и двигатель ведущего вала.
Здесь контроллер 30 отслеживания используется непосредственно для процессов вычисления значения сигналов управления отслеживанием и выработки команд скорости.
На фиг. 4 команды скорости ведущего вала, полученные с контроллера отслеживания, используются в качестве сравниваемого опорного значения при определении ошибки скорости двигателя ведущего вала, как описано выше, также команды как команды скорости ведущего вала, полученные с обычного контроллера 12, на фиг. 2. Тем не менее, процесс определения команд скорости ведущего вала данного изобретения отличается от обычного способы тем, что имеет тесную связь со значением ошибки отслеживания. То есть команды скорости ведущего вала по фиг. 4 получают в предположении, что значение сигнала управления отслеживанием вычислено.
Тем временем команды скорости ведущего вала, полученные с контроллера 30 отслеживания, различны по величине, включающей значение сигнала управления отслеживанием в соответствии с ошибкой отслеживания, и изменяются следующим образом. Когда головка расположена перед дорожкой, которая должна быть считана (когда головка находится на дорожке уровня P1 на фиг. 1), то есть когда скорость ленты должна быть уменьшена, значение команд скорости ведущего вала, полученные из вышеописанного процесса выработки команд скорости, меняются так, чтобы уменьшить скорость двигателя ведущего вала. Наоборот, когда головка расположена за дорожкой, которая должна быть считана (когда головка находится на дорожке уровня P2 на фиг. 1), то есть, когда лента должна перематываться быстрее, значения команд скорости ведущего вала изменяются так, чтобы увеличить скорость двигателя ведущего вала.
При этом физическое измерения, выражающее значение сигнала управления отслеживанием, и команды управления ведущим валом различны. То есть два физических значения могут быть выражены в различных формах в зависимости от устройства для процесса. Например, скорость вращения двигателя ведущего вала обычно выражается как частота повторения импульсов, выходящих с датчика частоты (ГС). Поэтому значения команд скорости ведущего вала удобно соотнести с частотой повторения импульсов.
Далее идет описание процесса определения ошибки скорости.
Значение ошибки скорости ведущего вала, полученное в процессе определения ошибки скорости, вычисляется сравнением команд скорости ведущего вала и действительной скорости вращения двигателя ведущего вала. То есть разность между опорным значением и величиной действительной скорости вращения и есть настоящее значение ошибки скорости двигателя ведущего вала, в предположении, что команда скорости ведущего вала есть опорное значение.
Таким образом, значение ошибки скорости, вычисленное в процессе определения ошибки скорости, есть значение ошибки, вызванной другими причинами, нежели ошибка отслеживания, и обычный процесс суммирования значения ошибки скорости со значением сигнала управления отслеживанием не нужен.
Далее идет описание процесса вычисления значения сигнала управления скоростью.
Процесс вычисления значения сигнала управления скоростью предназначен для наиболее стабильного, быстрого и точного вычисления значения управления скоростью двигателя ведущего вала, необходимого для учета значения ошибки в скорости вращения двигателя ведущего вала, появляющейся из предыдущего процесса, т.е. процесса определения ошибки скорости. Значение сигнала управления скоростью используется как управляющий сигнал для двигателя ведущего вала средствами возбуждения двигателя ведущего вала.
Контроллер 34 скорости ведущего вала по фиг. 5 является средством для определения ошибки скорости и вычисления значения сигнала управления скоростью.
Желательный вариант выполнения данного изобретения будет описан ниже с обращением к соответствующим чертежам.
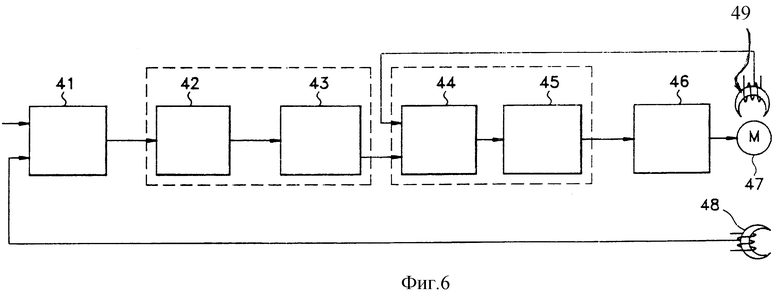
Фиг. 6 - это блок-схема, показывающая вариант выполнения устройства, используемого для выполнения способа по данному изобретению, в котором способ по данному изобретению приложен к бытовому видеомагнитофону.
На фиг. 6 позиция 41 обозначает фазовый компаратор ведущего вала, 42 обозначает фазовый контроллер ведущего вала, 43 означает генератор команд скорости ведущего вала, 44 обозначает детектор ошибки скорости ведущего вала, 45 обозначает контроллер скорости ведущего вала, 46 обозначает возбудитель двигателя ведущего вала, 47 обозначает двигатель ведущего вала, 48 обозначает неподвижную головку и 49 обозначает датчик частоты.
Далее идет описание работы устройства по фиг. 6.
Фазовый компаратор 41 ведущего вала сравнивает фазы переключающего импульса головки с заданной частотой с управляющим импульсом, воспроизводимым неподвижной головкой 48, и затем вычисляет ошибку отслеживания.
Фазовый контролер 42 ведущего вала умножает ошибку отслеживания на заданный коэффициент усиления или выполняет дифференцирование или интегрирование ошибки отслеживания, которая затем выделяется как величина, соответствующая значению сигнала управления отслеживанием. Генератор 43 команд скорости ведущего вала выдает различные команды скорости ведущего вала, которые соответствуют частоте импульса, представляющей значение управления отслеживанием. Здесь фазовый контроллер 42 ведущего вала и генератор 43 команд скорости ведущего вала соответствует контроллеру 30 отслеживания по фиг. 5.
Когда значение сигнала управления отслеживанием, выдаваемое с фазового контроллера 42 ведущего вала, есть напряжение, величина которого соответствует ошибке отслеживания, генератор 43 команд скорости может быть сконструирован с использованием генератора управляемого напряжением (ГУН), который выдает частотный сигнал, соответствующий значению сигнала управления отслеживанием, то есть напряжению.
Между тем, детектор ошибок скорости ведущего вала сравнивает скорость ведущего вала, фактически измеренную датчиком 49 частоты, и команды скорости ведущего вала, т.е. опорное значение с генератора 43 команд скорости ведущего вала, и затем вычисляют ошибку скорости двигателя ведущего вала. Контроллер 45 скорости ведущего вала умножает ошибку скорости двигателя ведущего вала на обычный коэффициент усиления или выполняет заданную регулировку усиления, например, дифференцирование или интегрирование ошибки скорости двигателя ведущего вала, и выдает управляющий сигнал скорости ведущего вала.
При этом детектор 44 ошибок скорости ведущего вала и контроллер 45 скорости ведущего вала соответствуют контроллеру 32 скорости ведущего вала на фиг 5.
Контроллер 30 отслеживания и контроллер 32 скорости ведущего вала могут использовать аппаратное обеспечение для выполнения своих функций, они могут также использовать микрокомпьютер, имеющий программное обеспечение, который может выполнять функцию аппаратного обеспечения.
Фиг. 7 это блок-схема, показывающая другой вариант выполнения устройства управления отслеживанием в соответствии с данным изобретением, то есть вариант выполнения, применимый к 8-миллиметровому видеомагнитофону.
На фиг. 7 позиция 51 обозначает головку воспроизведения, 51 обозначает усилитель воспроизведения, 53 обозначает узел обработки сигналов, 54 обозначает контроллер АОД, 55 обозначает аналого-цифровой преобразователь (АЦП), 56 обозначает микрокомпьютер, 57, обозначает цифроаналоговый преобразователь (ЦАП), 58 обозначает возбудитель двигателя ведущего вала, 59 обозначает двигатель ведущего вала, 60 обозначает датчик частоты.
Далее идет описание работы устройства по фиг. 7.
Усилитель 52 воспроизведения принимает сигнал, записанный на ленту, с головки 51 воспроизведения и затем усиливает принятый сигнал.
Диапазоны частот сигналов, записанных на 8-миллиметровую видеоленту, могут быть описаны следующим образом. Четыре вида опорных сигналов (f1 - f4) записаны в диапазоне 100 - 160 кГц и частотно-модулированный звуковой сигнал (ЗЧМ-сигнал) записан в диапазоне 1,4 - 1,6 МГц, сигнал цветности амплитудно модулирован на центральной частоте 743 кГц, и сигнал яркости записан в диапазоне 4,2 - 5,4 МГц.
Процессор 53 сигналов обнаруживает сигнал изображения, звуковой сигнал и опорный сигнал для выделения дорожки, которые записаны так, что имеют свои особые диапазоны, описанные выше, и затем обрабатывает сигналы.
Контроллер 54 АОД обнаруживает значение ошибки АОД среди сигналов, выходящих из процессора 53 сигналов, используя опорный сигнал, и преобразует значение ошибки АОД в АЦП 55 в цифровой сигнал, а затем выдает преобразованный сигнал на микрокомпьютер 56.
Среди особых опорных частот сигналов f1 равна 102,544 кГц, f2 = 118,951 кГц, f3 = 165,21 кГц, f4 = 148,689 кГц.
Разность уровней выходного опорного сигнала проверяется и используется как сигнал ошибки отслеживания, то есть следующее выражение задает сигнал ошибки отслеживания, и значение отклонения головки от дорожки может быть определено независимо от спектральных компонентов
Микрокомпьютер 56 выполняет заданную регулировку усиления сигнала ошибки ОАД (ошибки отслеживания) с последующим вычислением значения сигнала управления Δf отслеживанием. Микрокомпьютер 56 затем суммирует это значение сигнала управления отслеживанием с командой скорости ведущего вала или вычитает из нее, т.е. из постоянного значения f команды ведущего вала, в котором отслеживание не учитывается, с последующим преобразованием в команду скорости двигателя 59 ведущего вала.
В результате формируются различные команды f±Δf скорости ведущего вала, которая затем преобразуются в аналогичный сигнал в ЦАП 57. Затем возбудитель 58 двигателя ведущего вала управляет рабочей скоростью двигателя 59 ведущего вала в соответствии с командой скорости.
Двигатель ведущего вала 8-миллиметрового видеомагнитофона управляется так, чтобы вращаться с постоянной скоростью. Следовательно, значение сигнала управления отслеживанием суммируется со значением сигнала управления скоростью с последующим полным управлением двигателя ведущего вала.
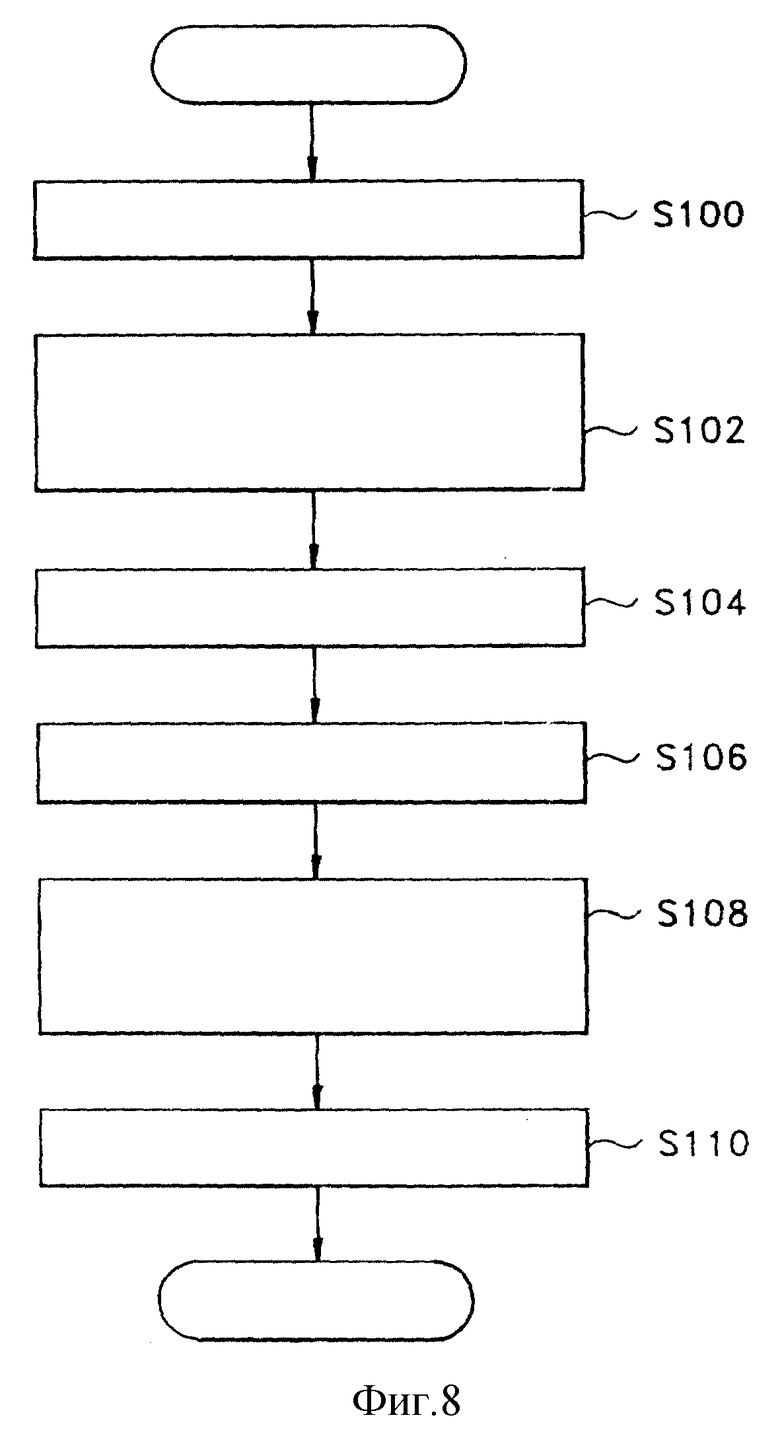
Фиг. 8 - это блок-схема алгоритма, поясняющая способ по данному изобретению, в котором требуется операция вычисления значения управления скоростью двигателя ведущего вала, когда для управления отслеживанием используется микрокомпьютер 56 как показано.
После шага S100, в котором ошибка отслеживания считывается из микрокомпьютера, необходимое значение управления отслеживанием в вышеуказанной ошибке отслеживания определяется выполнением алгоритма ПИД - управления. Затем на шаге S102 суммируют значение управления с командами скорости ведущего вала, требуемыми для вращения двигателя ведущего вала со скоростью, необходимой при отсутствии ошибки отслеживания, и вырабатывают новые команды скорости ведущего вала.
Затем рабочую скорость вращения двигателя ведущего вала вводят на шаге S104, а значение ошибки скорости, вырабатываемой вычислением разности между рабочей скоростью вращения и командой скорости ведущего вала на шаге S102 (например, разность между частотой синхронизации импульса), получают на шаге S106, затем получают управляющий сигнал скорости ведущего вала на шаге S108 выполнением алгоритма ПИД - управления на вышеуказанном значении ошибки скорости. Далее управляющий сигнал скорости ведущего выдается с возбудителя двигателя ведущего вала на шаге S110. Шаги S100 - S110 повторяются как цикл процесса.
Как описано выше, данное изобретение имеет хорошую совместимость отслеживания, даже и когда дорожка сильно искривлена, то есть, когда устройства для записи и воспроизведения различны. Кроме того, когда дорожка сильно искривлена, то есть, когда линейность дорожки низка, возможно верное отслеживанием. К тому же, управление коэффициентом и конструкция системы могут быть легко выполнены, если управляющий сигнал обрабатывается односторонне.
Обозначения на чертежах
Фиг. 2
12 - контроллер отслеживания,
14 - контроллер скорости ведущего вала,
18 - возбудитель двигателя ведущего вала,
слева от 12 - ошибка отслеживания,
слева от 14 - команда скорости ведущего вала,
внизу - действительная (рабочая) скорость ведущего вала.
Фиг. 3
21 - детектор ошибки скорости ведущего вала,
22 - контроллер скорости ведущего вала,
14 - фазовый компаратор ведущего вала,
24 - контроллер фазы ведущего вала,
26 - возбудитель двигателя ведущего вала,
слева от 21 - команда (f) скорости ведущего вала,
слева от 14 - переключающий импульс головки,
между 21 и 22 - значение ошибки скорости ведущего вала,
между 14 и 24 - значение ошибки отслеживания ведущего вала,
между 22 и 25 - значение скорости ведущего вала,
между 24 и 25 - значение сигнала управления отслеживанием ведущего вала,
между 28 и 14 - импульс синхронизации (управляющий импульс).
Фиг. 5
30 - контроллер отслеживания,
32 - контроллер скорости ведущего вала,
34 - возбудитель двигателя ведущего вала,
36 - двигатель ведущего вала,
слева - ошибка отслеживания,
внизу - действительная (рабочая) скорость ведущего вала.
Фиг. 6
41 - фазовый компаратор ведущего вала,
42 - контроллер фазы ведущего вала,
43 - генератор команд скорости ведущего вала,
44 - детектор ошибки скорости ведущего вала,
45 - контроллер скорости ведущего вала,
46 - возбудитель двигателя ведущего вала,
слева - переключающий импульс головки,
между 41 и 42 значение ошибки отслеживания,
между 42 и 43 - значение (f) сигнала управления отслеживанием,
между 42 и 43 - команда (f±Δf) скорости ведущего вала,
между 45 и 46 - значение управления ведущим валом.
Фиг. 7
52 - усилитель воспроизведения,
53 - узел обработки сигналов,
54 - контроллер АОД (автоматического обнаружения дорожки),
55 - аналого-цифровой преобразователь,
56 - микрокомпьютер,
57 - цифроаналоговый преобразователь,
58 - возбудитель двигателя ведущего вала,
справа - лента,
между 54 и 55 - значение ошибки отслеживания,
между 57 и 58 - значение сигнала управления отслеживанием.
Фиг. 8
Сверху - старт,
S100 - ввести ошибку отслеживания,
S102 - выдать команду скорости ведущего вала после вычисления алгоритма управления отслеживанием,
S104 - ввести скорость ведущего вала,
S108 - выдать команду управления после вычисления алгоритма управления скоростью ведущего вала,
S110 - вывести команду управления ведущим валом,
Внизу - конец.

В технике управления отслеживанием для устройств записи и воспроизведения изображения разработаны способ и устройство, которые могут выполнять высококачественное управление отслеживанием путем использования команд регулируемой скорости ведущего вала, которые учитывают значение ошибки отслеживания вместо использования обычных команд скорости ведущего вала, в которых ошибка отслеживания не учитывается. Для этого способ управления отслеживанием включает в себя шаг получения значения сигнала управления отслеживанием за счет выполнения заданной регулировки усиления сигнала ошибки отслеживания, шаг выработки команд регулируемой скорости ведущего вала, в которых учитываются значения сигнала управления отслеживанием, шаг определения значения ошибки скорости ведущего вала путем сравнения команд скорости ведущего вала с действительной скоростью вращения двигателя ведущего вала, в котором ошибка отслеживания учитывается выполнением заданной регулировки усиления сигнала ошибки скорости. Техническим результатом является быстрое управление, в котором улучшается совместимость отслеживания, легкое управление коэффициентами и уменьшение объема аппаратуры. 4 с. и 12 з.п.ф-лы, 9 ил.
Приоритет по пунктам:
23.12.1992 по пп.1 - 8;
21.07.1993 по пп.9 - 15.
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Способ многодорожечной магнитной записи-воспроизведения цифровой информации | 1982 |
|
SU1053147A1 |
| Универсальный дисковый видеопроигры-ватель | 1974 |
|
SU508964A1 |

