Изобретение относится к области станкостроения и может применяться в гибких автоматических линиях спутникового типа в условиях машиностроительного производства.
В качестве наиболее близкого аналога способа базирования и крепления спутника и станка с плавающей системой базирования для его реализации приняты технические решения по патенту RU 2082585C1 (B 23 Q 41/00, 1997). Недостатками указанных технических решений являются жесткая система базирования спутника на станке рабочей позиции, ограниченные возможности увеличения точности базирования спутника и повышения точности многоместной обработки деталей, закрепленных на боковых гранях корпуса спутника.
Задачей изобретения является увеличение точности базирования, установки спутника на станке рабочей позиции автоматической линии, повышение точности обработки деталей с обеспечением многосторонней и многоместной обработки.
Поставленная задача достигается тем, что в известном способе базирования и крепления спутника, выполненного многогранным с базирующими отверстиями, симметрично расположенными относительно центральных его осей в углах каждой грани используют установленные с возможностью поворота плавающие каретки с выполненными на них элементами базирования и крепления, спутник располагают между плавающими каретками и элементы базирования вводят с установленными зазорами в базирующие отверстия со стороны различных граней спутника по контуру спутника, а элементы крепления прижимают к граням спутника в местах базирования, при этом плавающие каретки выставляют осесимметрично относительно спутника, а установочные значения углов их поворота устанавливают равными.
Кроме того, поставленная задача достигается тем, что в известном станке с плавающей системой базирования для базирования и крепления спутника, содержащем обрабатывающие узлы, многогранный спутник в виде призмы, транспортное устройство его смены и перемещения и станину, станина выполнена из двух плоских рам с вертикальным проемом, соединенных между собой с образованием полости, а станок снабжен установленными на плоских рамах направляющими, осями, оснащенными продольными направляющими опорами и размещенным в полости самоустанавливающимся модулем с плавающими каретками, последние соединены с многогранным спутником и, с возможностью поворота и линейного перемещения, расположены оппозитно противоположным его граням на осях, при этом оси размещены на опорах, продольные направляющие которых сопряжены с направляющими плоских рам. Кроме того, в станке обрабатывающие узлы содержат механизм подачи и шпиндельные узлы с обрабатывающими инструментами, а каждая из плавающих кареток состоит из двух плит, соединенных поперечинами с образованием между плитами и поперечинами полостей, при этом на плитах выполнены направляющие, а направляющие узлы размещены на направляющих в упомянутых полостях, причем каждый обрабатывающий узел размещен на уровне расположения обрабатываемой детали на грани спутника, а в верхней и нижней частях плавающих кареток расположены в горизонтальном и угловом или вертикальном положении устройства базирования и крепления спутника. На опоре каретки может быть установлено устройство с приводом поворота каретки, а на рамах по обе стороны самоустанавливающегося модуля могут быть установлены соединенные с опорами устройства с приводом линейного перемещения кареток. Станок может быть снабжен транспортным устройством и закрепленными на рамах направляющими для установки указанного устройства, при этом на гранях спутника вдоль ребер выполняют пазы, на транспортном устройстве попарно располагают опорные призмы с приводом их перемещения, а призмы в верхнем положении сопрягают с пазами спутника на его нижней грани.
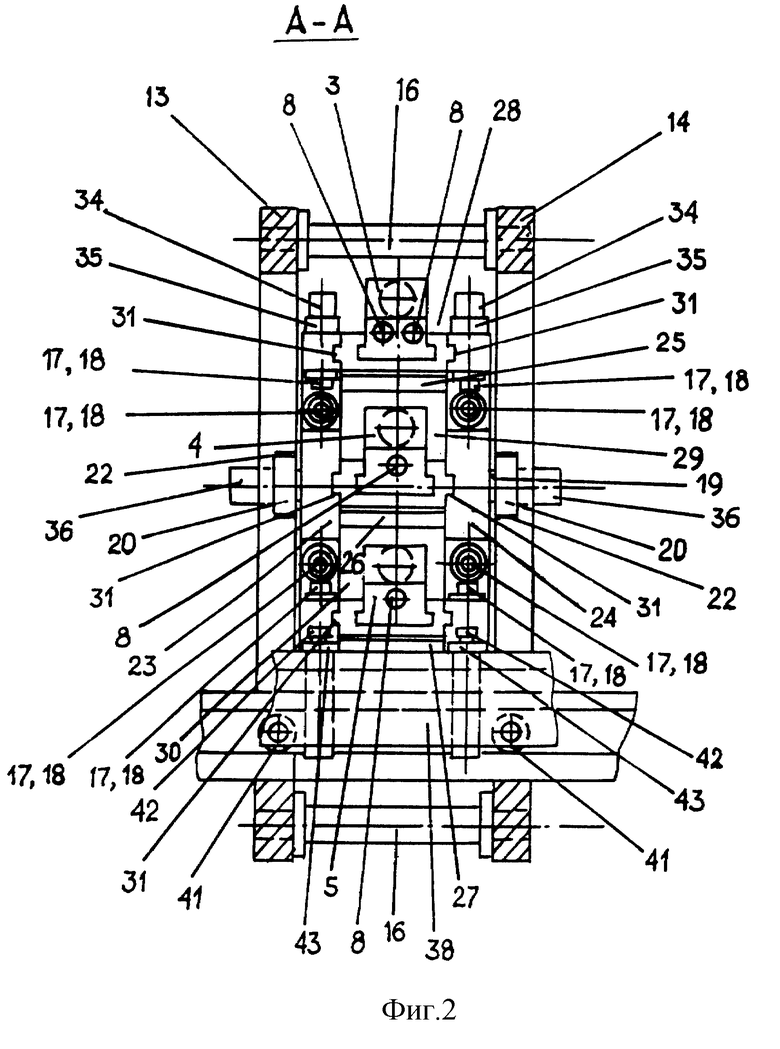
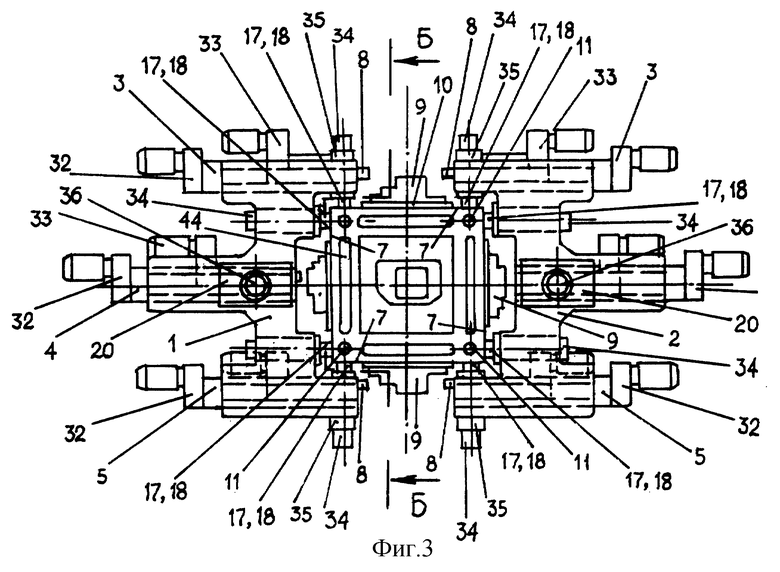
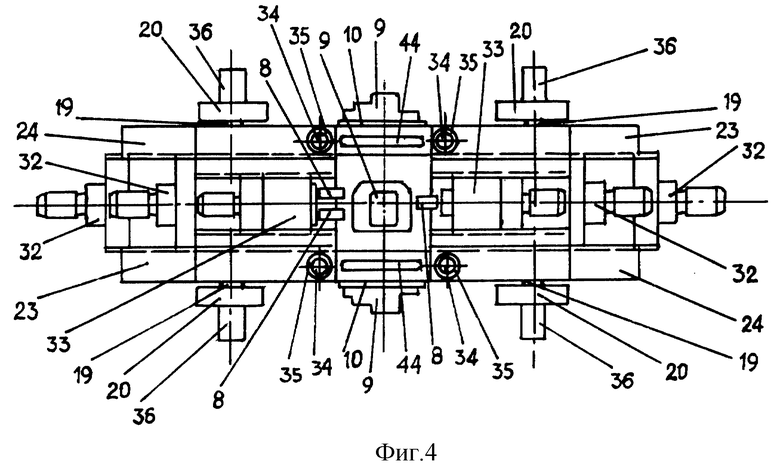
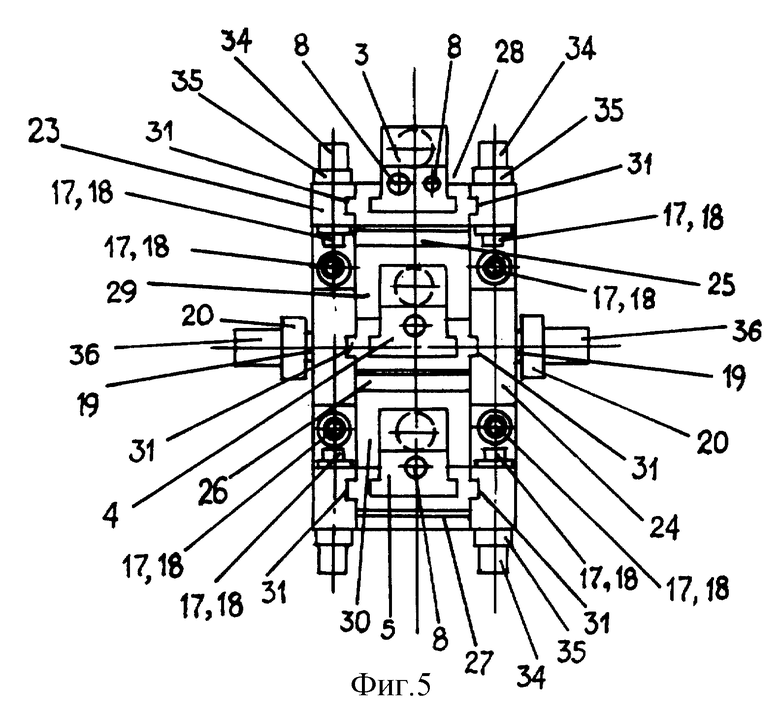
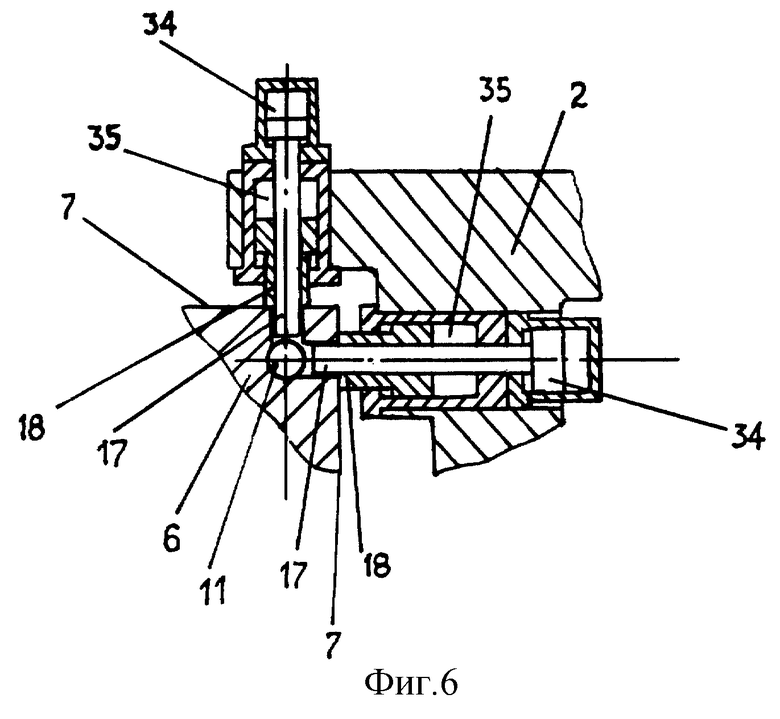
На фиг. 1 показан станок с плавающей системой базирования, вид спереди; на фиг. 2 - станок с плавающей системой базирования по сечению А-А без спутника на фиг. 1; на фиг. 3 - самоустанавливающийся модуль; на фиг. 4 - самоустанавливающийся модуль, вид сверху; на фиг. 5 - самоустанавливающийся модуль по сечению Б-Б на фиг. 3; на фиг. 6 - устройства с совмещенными приводами, элементами базирования и крепления, горизонтально и вертикально расположенные в верхней части каретки.
Станок с плавающей системой базирования, фиг. 1, 2, составляет рабочую позицию гибкой автоматической линии. Предложенный способ определяет плавающую систему совмещенного базирования и крепления кареток 1, 2 с обрабатывающими узлами 3, 4, 5 относительно спутника 6 по точкам симметрично распределенным со стороны различных граней 7 корпуса спутника 6, соответственно определяется базирование и установка обрабатывающих узлов 3, 4, 5 и инструмента 8 относительно спутника 6 и обрабатываемых деталей 9. Традиционно существующие системы базирования и крепления в автоматических линиях всегда являются жесткими и определяют базирование спутника относительно обрабатывающих узлов, базирование и установка спутника с обрабатываемыми деталями осуществляется относительно инструмента на обрабатывающих узлах со всеми накопленными погрешностями.
Спутник 6 выполнен в виде многогранной призмы, на боковых гранях 7 которого установлены в зажимных приспособлениях на плитах 10 обрабатываемые детали 9. В углах граней 7 имеются базирующие отверстия 11, расположенные симметрично относительно центральных осей спутника 6. Станина 12 станка выполнена в виде двух плоских рам 13, 14 с вертикальным проемом 15, фиг. 1, 2. Рамы 13, 14 соединены между собой, например стяжками 16. Между рамами 13, 14 имеется внутреннее пространство, в котором размещен самоустановливающийся модуль, фиг. 3. Самоустанавливающийся модуль содержит плавающие каретки 1, 2. Каретки 1, 2 оппозитно расположены и соединены со спутником 6 посредством элементов базирования 17 и крепления 18 на каретках 1, 2 и базирующих отверстий на гранях 7 спутника 6. На каретках 1, 2 с двух сторон соосно расположены оси 19. Оси 19 размещены в опорах 20, на которых имеются продольные направляющие 21. Направляющие 21 на опорах 20 сопряжены с ответными направляющими 22 на рамах 13, 14. Плавающая каретка 1, 2 состоит из двух плит 23, 24. Между собой плиты 23, 24 соединены поперечинами 25, 26, 27. Между плитами 23, 24 имеются в три уровня полости; полость 28 над поперечиной 25, полость 29 между поперечинами 25, 26 и полость 30 между поперечинами 26, 27. Со стороны полостей 28, 29, 30 на плитах 23, 24 выполнены направляющие 31. В каждой полости из числа 28, 29, 30 на направляющих 31 расположен сменный обрабатывающий узел, соответственно 3, 4, 5. Каждый обрабатывающий узел 3, 4, 5 содержит механизм подачи 32, шпиндельный узел 33 с обрабатывающими инструментами 8. В верхней и нижней частях каретки 1, 2 горизонтально и вертикально расположены элементы базирования 17 и крепления 18, приводы 34, 35 перемещения соответственно элементов базирования 17 и элементов крепления 18. На опоре 20 установлено соединенное с осью 19 устройство 36 с приводом поворота каретки 1, 2. На рамах 13, 14 по обе стороны самоустанавливающегося модуля, фиг. 1, размещены устройства 37 с приводом линейного перемещения каретки 1, 2. Привод устройства 37 соединен с опорой 20. Станок, фиг. 1, 2 имеет транспортное устройство 38 перемещения и механизмы подъема спутника 6. На рамах 13, 14 в проемах 15 закреплены направляющие 39, 40. Транспортное устройство 38 имеет привод продольного перемещения, не показанный на чертежах, и установлено на опорных роликах 41 в направляющих 39, 40. Механизмы подъема на транспортном устройстве 38 содержат попарно расположенные опорные призмы 42 и приводы 43 перемещения призмы 42
Станок реализует способ базирования и работает следующим образом. При наличии устройств 36 с приводами поворота на опорах 20 и устройств 37 с приводами линейного перемещения опор 20 в направляющих 22 на рамах 13, 14 каретки 1, 2 ориентируют и устанавливают по отношению к спутнику 6 с углами поворота кареток αi,βj, где αi принимает значение α1 или α2 для каретки 1 и βj имеет значение β1,β2 для каретки 2. Спутник 6 располагают между плавающими каретками 1, 2, вводят элементы базирования 17 с помощью приводов 34 на каретках 1, 2 в ответные базирующие отверстия 11 с установленными зазорами со стороны различных граней 7 по контуру спутника 6. Элементы крепления 18 прижимают к граням 7 спутника 6 в местах базирования. Плавающие каретки 1, 2 выставляют осесимметрично относительно спутника 6 так, чтобы установочные значения углов поворота кареток αi и βj были равны для следующих вариантов установки: 1. α1= β1≠ 0°; 2. α2= β2≠ 0°; 3. αi= βj= 0°. Для реализации способа на станине 12 станка применен самоустанавливающийся модуль, который содержит плавающие каретки 1, 2 на опорах 20, которые соединены со спутником 6. Плавающие каретки 1, 2 расположены со стороны противоположных боковых граней 7 спутника 6. Возможность поворота кареток 1, 2 относительно опор 20 обеспечивается устройствами 36 с приводами поворота кареток 1, 2 на осях 19, а возможность линейного перемещения кареток 1, 2 обеспечивается устройствами 37 с приводами перемещения опор 20 по направляющим 22 рам 13, 14 станины 12. Внутри кареток 1, 2 между плитами 23, 24 и поперечинами 25, 26, 27 образованы в три уровня полости 28, 29, 30. На направляющих 31 в плитах 23, 24 установлены с возможностью автоматической смены обрабатывающие узлы 3, 4, 5. Каждый обрабатывающий узел 3, 4, 5 расположен в соответствующей полости 28, 29, 30 на уровне расположения обрабатываемой детали 9 на гранях 7 спутника 6. На каретках 1, 2 в верхней и нижней частях попарно и взаимно перпендикулярно установлены на плитах 23, 24 устройства с приводами 34, 35. Приводы 34, 35 совмещены и соосно установлены с элементами базирования 17 и крепления 18. В цикле обработки деталей 9, закрепленных в приспособлениях на плитах 10 со стороны различных граней 7, спутник 6 первоначально введен через проем 15 на станине 12 между рамами 13, 14 и удерживается в ориентированном положении межпозиционным транспортным устройством 38 на двух поднятых опорных призмах 42 механизмов подъема. В верхнем положении опорные призмы 42 сопряжены с пазами 44 спутника 6 со стороны нижней грани. Одновременно по периметру спутника 6, фиг. 1, 3, элементы базирования - установочные пальцы 17 с помощью приводов 34 на плитах 23, 24 кареток 1, 2 вводятся в базирующие втулки с отверстиями 11 на гранях 7, обращенных к элементам базирования 17. Гарантированные зазоры между пальцами 17 и отверстиями в базирующих втулках 11 рассчитаны и установлены с достижением заданной точности базирования каретки 1, 2 относительно спутника 6. После завершения базирования элементы крепления 18 с применением приводов 35 прижимают к граням 7, каждый элемент 18 соосно и в местах ввода элементов базирования 17 определяет установочную точку совместного базирования и крепления на гранях спутника 6. В закрепленном положении спутник 6 и каретки 1, 2 самоустановлены, образуя самоустанавливающийся модуль. Детали 9 на гранях 7 спутника 6 подвергаются одновременной многоинструментальной обработке инструментами 8, обрабатывающими узлами 3, 4, 5 на трех уровнях их расположения. Во время обработки детали 9 на спутнике 6 опорные призмы 42 опускаются с помощью приводов 43. Транспортное устройство 38 на опорных роликах 41 по направляющим 39, 40 обеспечивает возвратное перемещение опорных призм 42, осуществляется вновь подъем опорных призм и сопряжение с пазами 44 спутника 6 со стороны нижней грани. После завершения обработки элементы базирования - установочные пальцы 17 выводятся из отверстий 11 на спутнике 6 с применением приводов 34, одновременно происходит раскрепление спутника 6 и отвод элементов крепления 18 с применением приводов 35. Спутник остается на поднятых опорных призмах 42. Транспортное устройство 38 перемещает спутники 6 на шаг. После чего цикл обработки повторяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАНОК МНОГОИНСТРУМЕНТАЛЬНОЙ ОБРАБОТКИ РАБОЧЕЙ ПОЗИЦИИ АВТОМАТИЧЕСКОЙ ЛИНИИ | 1998 |
|
RU2155660C2 |
| ПЕРЕКОМПОНУЕМАЯ АВТОМАТИЧЕСКАЯ ЛИНИЯ | 1995 |
|
RU2080976C1 |
| СПОСОБ СМЕНЫ И ТРАНСПОРТИРОВАНИЯ МНОГОИНСТРУМЕНТАЛЬНЫХ УЗЛОВ В АВТОМАТИЧЕСКОЙ ЛИНИИ И АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2159695C2 |
| ПЕРЕНАЛАЖИВАЕМЫЙ АГРЕГАТНЫЙ СТАНОК | 1991 |
|
RU2078674C1 |
| ПЕРЕКОМПОНУЕМАЯ АВТОМАТИЧЕСКАЯ ЛИНИЯ | 1995 |
|
RU2080975C1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ МНОГОСТОРОННЕЙ ОБРАБОТКИ | 1995 |
|
RU2082585C1 |
| МНОГОМЕСТНОЕ ПРИСПОСОБЛЕНИЕ-СПУТНИК | 2003 |
|
RU2258593C2 |
| АГРЕГАТНЫЙ СТАНОК С ЧПУ | 1991 |
|
RU2080974C1 |
| МНОГОМЕСТНОЕ ПРИСПОСОБЛЕНИЕ-СПУТНИК | 2003 |
|
RU2258594C2 |
| ГИБКАЯ АВТОМАТИЧЕСКАЯ ЛИНИЯ | 1992 |
|
RU2078672C1 |
Изобретение относится к области станкостроения и может применяться в гибких автоматических линиях спутникового типа. В способе используют установленные с возможностью поворота плавающие каретки. Спутник располагают между ними. На каретках выполнены элементы базирования и крепления. Первые вводят с зазорами в расположенные на спутнике в углах каждой грани отверстия. Вторые прижимают к граням в местах базирования. Каретки выставляют осесимметрично относительно спутника. Установочные значения углов поворота кареток устанавливают равными. Станок для реализации способа содержит самоустанавливающийся модуль с плавающими каретками. Последние с возможностью поворота и линейного перемещения расположены оппозитно противоположным граням спутника. Возможны также конструктивные варианты выполнения станка. Изобретение позволяет повысить точность установки спутника на станке, повысить точность обработки деталей. 2 с. и 3 з.п. ф-лы, 6 ил.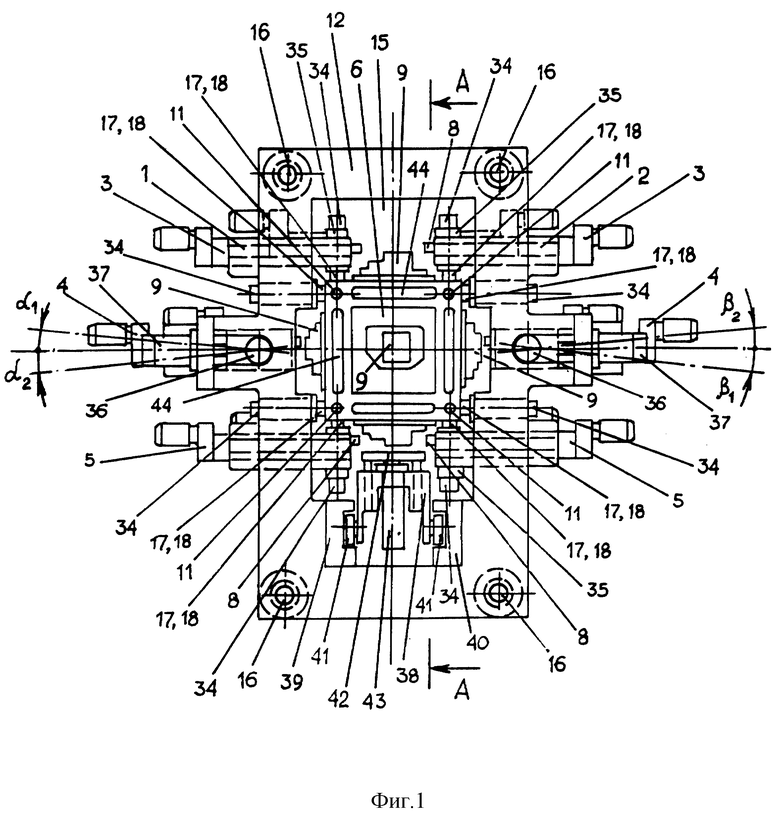
| АВТОМАТИЧЕСКАЯ ЛИНИЯ МНОГОСТОРОННЕЙ ОБРАБОТКИ | 1995 |
|
RU2082585C1 |
| ПЕРЕКОМПОНУЕМАЯ АВТОМАТИЧЕСКАЯ ЛИНИЯ | 1995 |
|
RU2080976C1 |
| ПЕРЕКОМПОНУЕМАЯ АВТОМАТИЧЕСКАЯ ЛИНИЯ | 1995 |
|
RU2080975C1 |
| Многооперационный станок | 1987 |
|
SU1454653A1 |

