Изобретение относится к механическому рулевому управлению транспортного средства с электрическим усилителем и может применяться в автомобилях повышенной проходимости, работающих преимущественно в маневровых режимах.
Наиболее близким по технической сущности является рулевое управление транспортного средства (см. а. с. СССР N 1539115, опубликованное 30.01.90 в Бюл. N 4), содержащее рулевой механизм, кинематически соединенный с управляемыми колесами, датчик крутящего момента, установленный на рулевом валу, усилитель мощности, электродвигатель, кинематически связанный с рулевым валом, коммутатор, компаратор, сумматор, источники порогового и опорного напряжений и датчик скорости.
Недостаток указанного рулевого управления транспортного средства заключается в том, что в маневровом режиме, когда электрический усилитель включен, с усилителя мощности на электродвигатель подается напряжение, пропорциональное сигналу датчика момента, и система управления электрическим усилителем работает как разомкнутая по основному параметру - моменту, развиваемому электрическим двигателем. Этот режим работы не гарантирует желаемого снижения требуемого крутящего момента на рулевом колесе при действии всевозможных помех: изменения температуры, напряжения питания усилителя мощности, изменения момента нагрузки на рулевом механизме и других. Кроме того, быстродействие такой системы очень низкое, так как определяется постоянными времени электродвигателя, и при резких маневрах нельзя ожидать достаточной динамической помощи водителю от такого электроусилителя руля.
Сущность изобретения заключается в том, что рулевое управление транспортного средства, содержащее рулевое колесо, кинематически соединенное через датчик момента и рулевой вал с рулевым механизмом, кинематически соединенным с управляемыми колесами, электродвигатель, кинематически связанный с рулевым валом, усилитель мощности, сумматор, задатчик порогового значения скорости движения, соединенный с первым входом компаратора, датчик скорости движения, соединенный со вторым входом компаратора, коммутатор, первый вход которого, соединен с выходом компаратора, а выход - с электродвигателем, снабжено датчиком тока, блоками преобразования сигналов датчика момента и датчика тока, первым и вторым блоками логики, первым и вторым регуляторами, причем выход усилителя мощности соединен со вторым входом коммутатора через датчик тока, выход которого соединен с входом блока преобразования сигналов датчика тока, вход усилителя мощности соединен с выходом первого блока логики, вход которого соединен с выходом сумматора, выход второго регулятора соединен с первым входом второго блока логики, выход которого соединен с первым входом первого регулятора, выход датчика момента соединен с входом блока преобразования сигналов датчика момента, выход которого соединен со вторыми входами первого регулятора и второго блока логики и входом второго регулятора, выход первого регулятора соединен с первым входом сумматора, второй вход которого соединен с выходом блока преобразования сигналов датчика тока.
Существенные отличия заключаются в новой совокупности связей между элементами и блоками устройства. Указанная совокупность связей позволяет повысить быстродействие работы электроусилителя рулевого управления транспортного средства и гарантировать желаемое снижение требуемого момента на рулевом колесе при любых углах поворота колес при достаточной мощности установленного электродвигателя.
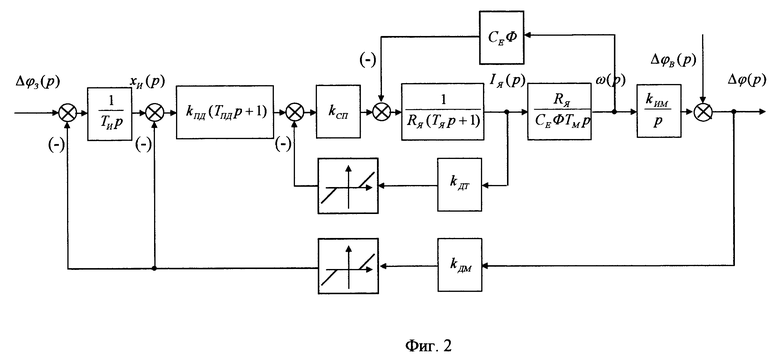
На фиг. 1 изображена функциональная схема рулевого управления, на фиг. 2 - структурная схема системы управления электроусилителя руля.
Рулевое управление транспортного средства (фиг. 1) содержит рулевое колесо 1, рулевой механизм 2, датчик 3 момента, электродвигатель 4, усилитель мощности 5, коммутатор 6, компаратор 7, датчик тока 8, задатчик 9 порогового значения скорости движения, блок 10 преобразования сигналов датчика момента, блок 11 преобразования сигналов датчика тока, датчик 12 скорости движения, первый блок 13 логики, сумматор 14, первый регулятор 15, второй блок 16 логики и второй регулятор 17. Рулевое колесо 1 кинематически соединено через датчик момента 3 и рулевой вал с рулевым механизмом 2, который в свою очередь соединен кинематически с управляемыми колесами. Электродвигатель 4 также кинематически связан с рулевым валом. Задатчик 9 порогового значения скорости движения соединен с первым входом компаратора 7, второй вход которого соединен с выходом датчика 12 скорости движения. Выход компаратора 7 соединен с первым входом коммутатора 6, выход которого соединен с электродвигателем 4. Усилитель 5 мощности через датчик 8 тока соединен со вторым входом коммутатора 6. Выход датчика 8 тока соединен с блоком 11 преобразования сигналов датчика тока. Вход усилителя 5 мощности соединен с выходом первого блока 13 логики, вход которого соединен с выходом сумматора 14. Выход второго регулятора 17 соединен с первым входом второго блока 16 логики, выход которого соединен с первым входом первого регулятора 15. Выход датчика 3 момента соединен с входом блока 10 преобразования сигналов датчика момента, выход которого соединен со вторыми входами первого регулятора 15 и второго блока 16 логики и входом второго регулятора 17. Выход первого регулятора 15 соединен с первым входом сумматора 14, второй вход которого соединен с выходом блока 11 преобразования сигналов датчика тока.
Датчик 3 момента, например, представляет собой упругий элемент, на концах которого закреплены экраны токовихревого датчика угла поворота. Усилитель 5 мощности, например, выполнен в виде транзисторного широтно-импульсного преобразователя с высокой частотой коммутации силовых транзисторов. Коммутатор 6, например, представляет собой стандартное релейное переключающее устройство. Компаратор 7, например, цифровой, выполнен, например, на микросхемах КР1533СП1 или программно. Датчик 8 тока, например, представляет собой шунт. Задатчик 9 порогового значения скорости движения, например, выполнен в виде переключателей, подающих логические нули или единицы на разряды первого входа компаратора 7, или программно. Блоки 10 и 11 преобразования сигналов датчиков момента и тока, например, включают в себя стандартные аналого-цифровые преобразователи и нелинейные элементы, реализованные, например, на микросхемах КР1533КП13 и стандартных логических элементах или программно. Датчик 12 скорости, например, снабжен стандартным аналого-цифровым преобразователем. Первый блок 13 логики, например, выполнен на микросхемах КР1533КП13 и стандартных логических элементах или программно. Сумматор 14, например, выполнен на микросхемах КР555ИМ6 или программно. Регуляторы 15 и 17, например, выполнены на микросхемах КР555ИМ6, КР555ТМ8 и генераторах прямоугольных импульсов или программно. Второй блок 16 логики, например, представляет собой дешифратор нуля сигнала блока 10 преобразования сигналов датчика момента и воздействует на входы сброса микросхем КР555ТМ8 второго регулятора 17. Второй блок 16 логики также может быть реализован программно. При программной реализации блоков 7, 9, 10, 11, 13, 14, 15, 16, 17 может быть использован, например, микроконтроллер PIC 16C74, обладающий необходимым количеством встроенных аналого-цифровых преобразователей и встроенным широтно-импульсным модулятором.
Рулевое управление транспортного средства работает следующим образом.
При движении автомобиля на сравнительно низких скоростях, т.е. в маневровом режиме, выходной сигнал датчика 12 скорости движения меньше сигнала задатчика 9 порогового значения скорости движения и выходной сигнал компаратора 7 находится в состоянии, соответствующем подключению цепи электродвигателя 4 к усилителю 5 мощности через коммутатор 6 и датчик 8 тока. В этом режиме работает электроусилитель руля, принцип действия которого поясняет структурная схема (фиг. 2) его системы управления.
Система управления электроусилителя руля представляет собой систему автоматической минимизации момента на рулевом колесе и выполнена в виде двухконтурной системы стабилизации угла Δϕ закручивания упругого элемента датчика момента (фактически крутящего момента, прикладываемого водителем к рулевому колесу 1). Выходной сигнал датчика 3 момента, представленного на структурной схеме коэффициентом передачи kдм, поступает в блок 10 преобразования сигналов датчика момента, который с помощью аналого-цифрового преобразователя оцифровывает этот сигнал и подает на вход нелинейного звена. Нелинейное звено типа "зона нечувствительности" в блоке 10 преобразования сигналов датчика момента предусмотрено для того, чтобы задать минимальное значение момента на рулевом колесе 1, при котором начинает действовать электроусилитель руля. При превышении сигналом с датчика 3 момента величины зоны нечувствительности ненулевой сигнал с блока 10 преобразования сигналов датчика момента поступает на входы первого (пропорционально-дифференциального) и второго (интегрального) регуляторов 15 и 16.
Передаточная функция первого регулятора 15 R1(p) = kпд(Tпдp+1), (1), где kпд - коэффициент передачи, Tпд - постоянная времени пропорционально-дифференциального регулятора.
Передаточная функция второго регулятора 16 R2(p) = 1/Tиp, (2), где Tи - постоянная времени интегрального регулятора.
Пропорционально-дифференциальный регулятор 15 предназначен для компенсации наибольшей постоянной времени объекта управления, под которым понимается совокупность электродвигателя 4 с кинематической цепью электроусилителя, т.е. для увеличения быстродействия системы. На структурной схеме (фиг. 2) электродвигатель 4 представлен рядом динамических звеньев:
параметры которых (сопротивление Rя якорной цепи, электромагнитная Tэ и электромеханическая Tм постоянные времени, конструктивный коэффициент Cе и магнитный поток Φ) являются функциями конструктивных особенностей электродвигателя и кинематической цепи электроусилителя руля. Кинематическая цепь, посредством которой электродвигатель 4 воздействует на рулевой вал, представлена на структурной схеме динамическим звеном kим/p, (4), где kим - коэффициент передачи.
Усилитель 5 мощности на структурной схеме представлен безинерционным звеном с коэффициентом передачи kсп.
Интегральный регулятор 17 предназначен для обеспечения требуемых динамических показателей системы управления электроусилителя руля и компенсации действия всех помех, охваченных обратной связью.
Таким образом, при приложении водителем некоторого момента к рулевому колесу появляется закручивание упругого элемента датчика 3 момента на угол Δϕв(p), которое (при превышении определенной наперед заданной величины, задаваемой блоком 10 преобразования сигналов датчика момента и определяемой комфортной для водителя величиной момента на рулевом колесе) воспринимается системой управления электроусилителем как возмущение, которое необходимо компенсировать, так как задающее воздействие заведомо принимается равным нулю Δϕ3(p) = 0. При этом регуляторы 15 и 17 начинают работать в соответствии со своими передаточными функциями и подавать через сумматор 14 и первый блок 13 логики сигналы управления на усилитель 5 мощности, который подает напряжение на электродвигатель 4 через датчик 8 тока и коммутатор 6. Электродвигатель 4 начинает вращать рулевой вал через кинематическую цепь, помогая водителю поворачивать колеса через рулевой механизм 2. Причем при достаточной мощности электродвигателя 4 значительно снижается требуемый момент на рулевом колесе 1, в основном определяемый задаваемой величиной зоны нечувствительности в блоке 10 преобразования сигналов датчика момента. Быстродействие предлагаемой системы высокое, поэтому при резких маневрах электроусилитель руля будет быстро реагировать на изменения Δϕв(p), помогая водителю.
Когда вращение рулевого колеса водителем прекращено и электроусилитель отработал возмущение Δϕв(p) до величины зоны нечувствительности блока 10 преобразования сигналов датчика момента, т.е. сигнал на выходе блока 10 становится равным нулю, второй блок 16 логики обнуляет выходной сигнал xи(p) второго регулятора 17. При этом на входах первого регулятора 15 также появляются нулевые сигналы, поэтому через время, определяемое постоянной времени Tпд регулятора, на усилитель 5 мощности подается нулевой сигнал и электродвигатель 4 перестает действовать.
Второй блок 13 логики предназначен для ограничения сигналов на входе усилителя 5 мощности, что исключает возможность опрокидывания цифрового широтно-импульсного модулятора, входящего в состав усилителя 5 мощности, при превышении выходным сигналом сумматора 14 разрядности модулятора.
Датчик 8 тока и блок 11 преобразования сигналов датчика тока служат для ограничения токов нагрузки электродвигателя 4 посредством задержанной обратной связи. На структурной схеме (фиг. 2) датчик 3 тока представлен коэффициентом kдт передачи, а блок 11 преобразования сигналов датчика тока нелинейным звеном типа "зона нечувствительности". При превышении током значения тока отсечки, задаваемого величиной зоны нечувствительности блока 11, в действие вступает задержанная обратная связь по току с большим коэффициентом передачи, определяемым линейным участком нелинейного звена. Сигнал блока 11 подается на второй вход сумматора 14, посредством которого вычитается из выходного сигнала первого регулятора 15. При этом напряжение на электродвигателе будет ограничиваться в функции параметров нелинейного звена блока 11 преобразования сигналов датчика тока.
Описанный режим работы рулевого управления транспортного средства будет иметь место до тех пор, пока скорость движения автомобиля не превысит величины, определяемой задатчиком порогового значения скорости движения. В этой ситуации вступает в действие транспортный режим работы рулевого управления, выходной сигнал датчика 12 скорости движения превышает сигнал задатчика 9 порогового значения скорости движения, компаратор 7 переключается и коммутатор 6 отключает якорную цепь электродвигателя 4 от усилителя 5 мощности и замыкает ее на шунт. Поэтому в транспортном режиме движения на высоких скоростях рулевое колесо оказывается нагруженным дополнительным тормозным моментом, величина которого пропорциональна скорости вращения рулевого вала. Дополнительный тормозной момент позволяет стабилизировать управляемые колеса как по скорости действия внешних сил со стороны дороги, так и по скорости вращения рулевого колеса, что повышает безопасность движения.
Таким образом, предлагаемое рулевое управление транспортного средства позволяет повысить быстродействие работы электроусилителя рулевого управления транспортного средства и гарантировать желаемое снижение требуемого момента на рулевом колесе при любых углах поворота колес при достаточной мощности установленного электродвигателя.
Изобретение относится к механическому рулевому управлению транспортного средства с электрическим усилителем и может применяться в автомобилях повышенной проходимости, работающих преимущественно в маневровых режимах. Рулевое управление транспортного средства содержит рулевое колесо 1, рулевой механизм 2, датчик 3 момента, электродвигатель 4, усилитель мощности 5, коммутатор 6, компаратор 7, датчик тока 8, задатчик 9 порогового значения скорости движения, блок 10 преобразования сигналов датчика момента, блок 11 преобразования сигналов датчика тока, датчик 12 скорости движения, первый блок 13 логики, сумматор 14, первый регулятор 15, второй блок 16 логики и второй регулятор 17. Предлагаемое рулевое управление транспортного средства позволяет повысить быстродействие в работе электроусилителя рулевого управления транспортного средства и гарантировать желаемое снижение требуемого момента на рулевом колесе при любых углах поворота колес при достаточной мощности установленного электродвигателя. 2 ил.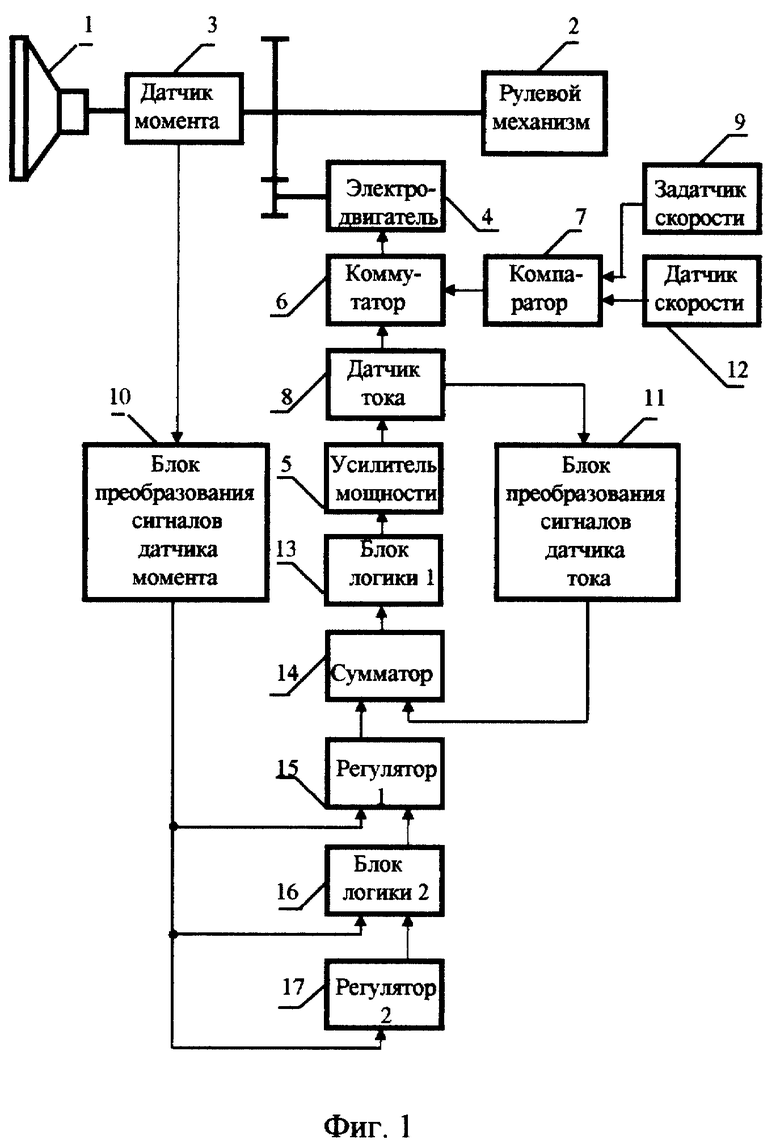
Рулевое управление транспортного средства, содержащее рулевое колесо, кинематически соединенное через датчик момента и рулевой вал с рулевым механизмом, кинематически соединенным с управляемыми колесами, электродвигатель, кинематически связанный с рулевым валом, усилитель мощности, сумматор, задатчик порогового значения скорости движения, соединенный с первым входом компаратора, датчик скорости движения, соединенный с вторым входом компаратора, коммутатор, первый вход которого соединен с выходом компаратора, а выход - с электродвигателем, отличающееся тем, что оно снабжено датчиком тока, блоками преобразования сигналов датчика момента и датчика тока, первым и вторым блоками логики, первым и вторым регуляторами, причем выход усилителя мощности соединен с вторым входом коммутатора через датчик тока, выход которого соединен с входом блока преобразования сигналов датчика тока, вход усилителя мощности соединен с выходом первого блока логики, вход которого соединен с выходом сумматора, выход второго регулятора - с первым входом второго блока логики, выход которого соединен с первым входом первого регулятора, выход датчика момента - с входом блока преобразования сигналов датчика момента, выход которого соединен с вторыми входами первого регулятора и второго блока логики и входом второго регулятора, выход первого регулятора - с первым входом сумматора, второй вход которого соединен с выходом блока преобразования сигналов датчика тока.
| Рулевое управление транспортного средства | 1988 |
|
SU1539115A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |
