Изобретение относится к производству строительных материалов и предназначено для уплотнения бетонной смеси на вибростоле.
Известен дебалансный вибровозбудитель со встроенным электродвигателем, включающий в себя асинхронный двигатель, на валу которого расположены спаренные дебалансы одинаковой массы /Строительные машины: Справ.: В 2-х т.T.1.: Машины для строительства промышленных, гражданских сооружений и дорог/ Под общ. ред. Э.Н.Кузина. - 5-е изд., перераб. - М.: Машиностроение, 1991. - С.349/ [1].
К недостаткам данного устройства относится то, что в нем используется ручное разведение дебалансов для изменения амплитуды колебаний рабочего органа, что в процессе виброуплотнения невозможно, так как необходимо останавливать электродвигатель, что приведет к нарушению уплотнения бетонной смеси, потере времени и электроэнергии. При использовании одного положения дебалансов на валу двигателя, т.е. уплотнении на одной амплитуде невозможно повысить показатели качества изделий по прочности на этапе виброуплотнения.
Известен одновальный дебалансный вибровозбудитель с направленной вынуждающей силой, включающий в себя асинхронный двигатель, на валу которого закреплено по одному одинаковому дебалансу, соединенный через маятниковый амортизатор с вибростолом /Механическое оборудование предприятий строительных материалов, изделий и конструкций/ С.Г.Силенок, А.А.Борщевский, М.Н.Горбовец. - М.: Машиностроение, 1990 - С.240/ [2].
Недостатком является отсутствие возможности изменения массы дебалансов в процессе вибрирования и как следствие невозможность изменения амплитуды колебаний рабочего органа, т.е. повысить показатели качества изделий по прочности на этапе виброуплотнения невозможно.
Наиболее близким устройством того же назначения к заявленному изобретению по совокупности признаков является вибровозбудитель, состоящий из двух соосно расположенных асинхронных электродвигателей на внутренних концах валов, закрепленных по одному дебалансу. Регулирование амплитуды осуществляется путем автоматического изменения угла рассогласования дебалансов с помощью САУ /С1 2157756 RU В 28 В 1/087 Виброплощадка для уплотнения бетонных смесей в форме/ Галицков С.Я., Голубев В.И., Караваев А.В., Радомский В.М. №98117630; Заявл. 24.09.1998// БИ - 2000. - №29 -/ [3] - принято за прототип.
К причинам, препятствующим достижению указанного ниже технического результата, при использовании известного устройства относится то, что в при некоторых режимах работы на данном вибровозбудителе возникает вращающий момент, который может привести к раскачиванию виброплощадки (особенно на низких частотах) и как следствие нарушению структуры бетона и снижению прочности изделия. Также к недостаткам можно отнести расположение электродвигателей и датчиков непосредственно в зоне интенсивной вибрации, что снижает долговечность и надежность их работы, кроме того, в прототипе отсутствует возможность автоматической стабилизации амплитуды колебаний.
Технический результат - повышение показателей качества бетонных изделий по прочности, увеличение ресурса работы виброблоков, экономия электроэнергии и строительных материалов, входящих в состав бетонной смеси, сокращение времени виброуплотнения.
Технический результат достигается тем, что в известной виброплощадке для уплотнения бетонных смесей в форме, содержащей рабочий орган - вибростол, установленный посредством упругих прокладок на основании, закрепленный на нижней части вибростола дебалансный вибровозбудитель с двумя соосными валами, приводимыми от двух асинхронных двигателей и системой автоматического управления этими двигателями, в которую включены задатчик частоты вибрирования, задатчик амплитуды колебаний рабочего органа, первый и второй регуляторы системы управления углом поворота вала первого двигателя, оснащенного датчиком угла поворота, первый и второй регуляторы системы управления углом поворота вала второго двигателя, оснащенного датчиком угла поворота, блок суммирования, причем выход задатчика частоты вибрирования соединен с прямым входом первого регулятора системы управления углом поворота вала первого двигателя и с первым входом блока суммирования, выход блока суммирования соединен с прямым входом первого регулятора системы управления углом поворота вала второго двигателя, выход первого регулятора системы управления углом поворота первого двигателя соединен с прямым входом второго регулятора системы управления углом поворота вала первого двигателя, аналогично выход первого регулятора системы управления углом поворота вала второго двигателя соединен с прямым входом второго регулятора системы управления углом поворота вала второго двигателя, выход второго регулятора системы управления углом поворота вала первого двигателя соединен со входом частотного силового преобразователя первого двигателя, выход второго регулятора системы управления углом поворота вала второго двигателя соединен со входом частотного силового преобразователя второго двигателя, выход частотного силового преобразователя первого двигателя соединен со входом первого двигателя, выход частотного силового преобразователя второго двигателя соединен со входом второго двигателя, выход датчика угла поворота вала первого двигателя соединен с инверсными входами первого и второго регуляторов системы управления углом поворота вала первого двигателя, выход датчика угла поворота вала второго двигателя соединен с инверсными входами первого и второго регуляторов система управления углом поворота вала второго двигателя, причем в систему управления вибровозбудителя дополнительно включены регулятор амплитуды колебаний рабочего органа, датчик вибрации, соединенный с рабочим органом, второй блок суммирования, причем выход задатчика амплитуды колебаний рабочего органа соединен с прямым входом второго блока суммирования, выход которого соединен со входом регулятора амплитуды колебаний, выход которого соединен со вторым входом первого блока суммирования, а выход датчика вибрации соединен с инверсным входом второго блока суммирования.
Конструкция вибровозбудителя выполнена, в виде полого внешнего и расположенного в нем внутреннего валов, причем на рабочем органе в подшипниковых опорах закреплен полый внешний вал с расположенными на концах дебалансами и с закрепленным шкивом под клиновидный ремень приводного асинхронного двигателя полого внешнего вала и шкивом под зубчатый ремень, приводящий датчик угла поворота полого внешнего вала, а внутри полого внешнего вала на подшипниках крепится внутренний вал с расположенными на концах дебалансами и закрепленным шкивом под клиновидный ремень приводного двигателя внутреннего вала и шкивом под зубчатый ремень, приводящий датчик угла поворота внутреннего вала.
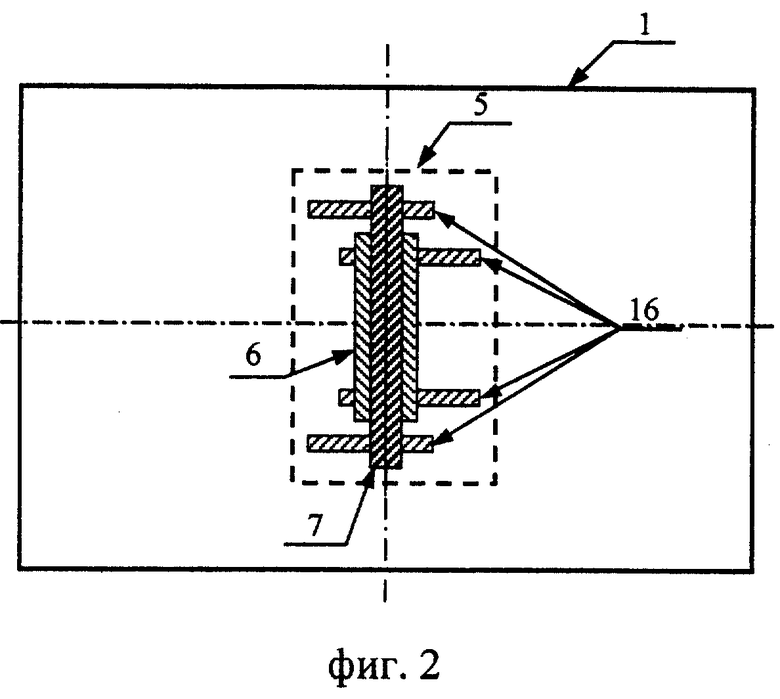
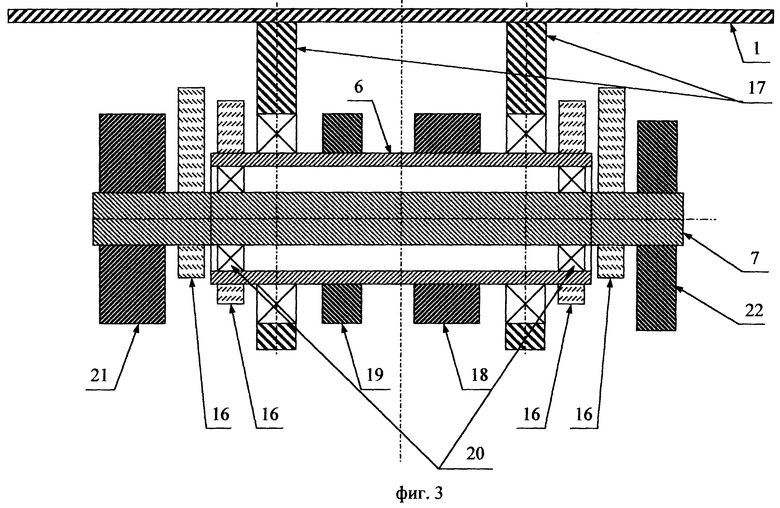
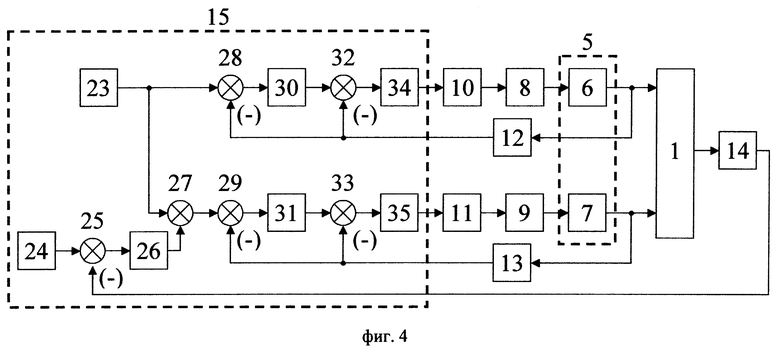
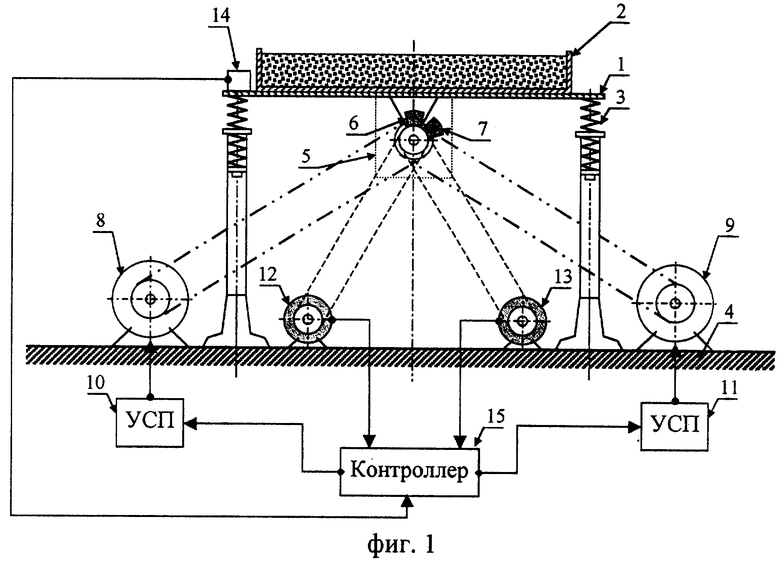
На фиг.1 изображена виброплощадка для уплотнения бетонных смесей; на фиг.2 показана схема расположения дебалансов; на фиг.3 показано устройство вибровозбудителя; на фиг.4 изображена структурная схема системы управления.
Виброплощадка содержит рабочий орган - вибростол 1, форму с бетонной смесью 2. Вибростол посредством упругих прокладок 3 опирается на основание 4. На нижней части стола закреплен вибровозбудитель 5 с двумя расположенными один в другом валами: внешним 6 и внутренним 7. Привод валов осуществляется посредством ременной передачи от двух асинхронных двигателей 8 и 9, соответственно для внешнего и внутреннего вала, питание приводных двигателей осуществляется от двух управляемых силовых преобразователей 10 и 11. С помощью зубчатой ременной передачи с валами соединены датчики угла поворота 12 и 13, соответственно для внешнего и внутреннего валов. На рабочем органе закреплен датчик вибрации 14. Сигналы с датчиков угла поворота 12 и 13 и с датчика вибрации 14 поступают на контроллер 15, который выдает управляющие сигналы для силовых преобразователей 10 и 11.
На фиг.2 схематично показано расположение вибровозбудителя 5 на рабочем органе - вибростоле 1. Дебалансы 16 имеют одинаковую массу и расположены попарно симметрично на внешнем 6 и внутреннем 7 валах вибровозбудителя 5.
На фиг.3 показано устройство вибровозбудителя 5, который крепится посредством подшипниковых опор 17 к рабочему органу - вибростолу 1. Он включает в себя вращающийся в опорах 17 внешний вал 6, на котором симметрично относительно его середины закреплена пара дебалансов 16, также на нем закреплены шкив 18 для привода вала от двигателя 8, и шкив 19 для привода датчика угла поворота 12. Внутренний вал 7 вращается во внешнем, в подшипниковых опорах 20, и включает в себя пару дебалансов 16, закрепленных симметрично относительно его середины, также на нем закреплены шкив 21 для привода вала от двигателя 9, и шкив 22 для привода датчика угла поворота 13.
На фиг.4 изображена структурная схема системы управления синхронным вращением дебалансов и их смещением относительно друг друга в процессе вращения. Она включает в себя задатчик частоты вибрирования 23, задатчик амплитуды колебаний рабочего органа 24, второй блок суммирования 25, регулятор амплитуды колебаний рабочего органа 26, первый блок суммирования 27, узлы сравнения 28 и 29 соответственно в первом и во втором каналах, и два идентичных канала управления. Первый канал - для управления углом поворота внешнего вала, второй - углом поворота внутреннего вала. Каждый из которых содержит интегральный регулятор 30 и 31, соответственно в первом и во втором каналах, узлы сравнения 32 и 33 соответственно в первом и во втором канале, пропорционально-дифференциальный регулятор 34 и 35, соответственно в первом и во втором канале, частотный силовой преобразователь 10 и 11, соответственно в первом и во втором канале, асинхронный двигатель 8 и 9, соответственно в первом и во втором канале, внешний 6 и внутренний 7 валы, соответственно в первом и во втором канале, датчик угла поворота внешнего 12 и внутреннего 13 валов, соответственно в первом и во втором канале, рабочий орган - вибростол 1 и датчик вибрации 14.
Выход задатчика частоты вибрации 23 соединен с прямым входом узла сравнения 28 и с первым входом первого блока суммирования 27, выход задатчика амплитуды колебаний рабочего органа 24 соединен с прямым входом второго блока суммирования 25, выход второго блока суммирования 25 соединен с входом регулятора амплитуды 26, выход регулятора амплитуды 26 соединен со вторым входом первого блока суммирования 27, выход первого блока суммирования 27 соединен с прямым входом узла сравнения 29. В прямом входе первого канала управления последовательно установлены узел сравнения 28, интегральный регулятор 30, узел сравнения 32, пропорционально-дифференциальный регулятор 34, частотный силовой преобразователь 10, асинхронный двигатель 8, внешний вал 6, а в обратной связи установлен датчик угла поворота внешнего вала 12, выход датчика 12 соединен с инверсными входами узлов сравнения 28 и 32, а выход датчика 13 соединен с инверсными входами узлов сравнения 29 и 33, валы 6 и 7 закреплены на рабочем органе вибростоле 1, на котором закреплен датчик вибрации 14, выход датчика вибрации 14 соединен с инверсным входом второго блока суммирования сравнения 25.
Задатчик частоты 23, задатчик и регулятор амплитуды 24 и 26, интегральные регуляторы 30 и 31, узлы сравнения 28, 29, 32, 33, блоки суммирования 27 и 25, пропорционально-дифференциальные регуляторы 34, 35 выполнены, например, программно. Частотные силовые преобразователи 10 и 11 выполнены, например, в виде стандартных транзисторных управляемых частотно-импульсных преобразователей со встроенными стандартными цифро-аналоговыми преобразователями, датчики угла поворота 12 и 13 выполнены, например, в виде фотоэлектрических преобразователей типа BE-178. При программной реализации блоков 23, 24, 25, 26, 27, 28, 29, 30, 31, 32, 33, 34, 35 может быть использован, например, программируемый контроллер С-60 /Программируемый контроллер С60 / Техническое описание, - 64.10.060 00 00.000 ТО. - АО Автоваз/ [4], обладающий необходимым количеством встроенных цифро-аналоговых преобразователей и устройств сопряжения с фотоэлектрическими датчиками угла. В качестве датчика вибрации может быть использован, например, стандартный датчик вибрации типа ВП-3 /Датчики контроля и регулирования: Справ./ Д.И.Агейкин, Е.Н.Костина, Н.Н.Кузнецова. - М.: Машиностроение, 1965. - С.500/ [5]. В качестве управляемого преобразователя частоты может быть использован, например, преобразователь БТУ 3601 /Устройство управления тиристорное серии БТУ 3601. Паспорт. ОЛХ. 468.153/ [6].
Установка работает следующим образом: по заданному закону изменения частоты колебаний рабочего органа вибростола vзад и амплитуды колебаний xзад на выходе задатчика частоты 23 формируется сигнал задания угла поворота внешнего вала α1зад=Ψ(vзад), а на выходе задатчика амплитуды 24 формируется сигнал задания величины амплитуды колебаний Азад=Ψ(xзад), который складывается с сигналом Аос датчика вибрации 14 во втором блоке суммирования 25 и поступает на регулятор амплитуды, который формирует угол рассогласования дебалансов ϕрас=χ(ΔА), далее сигнал ϕрас суммируется с α1зад в первом блоке суммирования 27, что дает на его выходе сигнал задания угла поворота внутреннего вала α2зад.
Выходные сигналы с задатчика 23 и первого блока суммирования 27 поступают соответственно на входы следящих приводов первого и второго двигателей. Сигнал с выхода сумматора 28 подается на вход интегрального регулятора 30, который необходим для придания следящей системе требуемого быстродействия. Сигнал с выхода сумматора 32 поступает на вход пропорционально-дифференциального регулятора 34, предназначенного для компенсации наибольшей постоянной времени объекта управления. Сигнал с регулятора 34 подается на вход частотного силового преобразователя 10, который изменяет частоту и амплитуду напряжения питания асинхронного двигателя 8 и тем самым регулирует его скорость вращения и угол поворота вала двигателя и соответственно угол поворота внешнего вала 6. На выходе внешнего вала формируется действительное значение угла поворота его дебалансов α1, которое контролируется с помощью датчика 12.
Сигнал с выхода сумматора 29 подается на вход интегрального регулятора 31, который необходим для придания следящей системе требуемого быстродействия. Сигнал с выхода сумматора 33 поступает на вход пропорционально-дифференциального регулятора 35, предназначенного для компенсации наибольшей постоянной времени объекта управления. Сигнал с регулятора 35 подается на вход частотного силового преобразователя 11, который изменяет частоту и амплитуду напряжения питания асинхронного двигателя 9 и тем самым регулирует его скорость вращения и угол поворота вала двигателя и соответственно угол поворота внутреннего вала 7. На выходе внутреннего вала формируется действительное значение угла поворота его дебалансов α2, которое контролируется с помощью датчика 13. Разность углов α1 и α2 дает действительный угол ϕ разведения дебалансов внешнего 8 и внутреннего 9 валов, который должен быть близким по значению с ϕрас. Амплитуда колебаний рабочего органа контролируется датчиком вибрации 14, сигнал которого Аос вычитается из сигнала задатчика амплитуды Азад во втором блоке суммирования 25, с выхода которого разность сигналов ΔА поступает на вход регулятора амплитуды 26.
Валы 6 и 7 вращаются синхронно с равной скоростью. Скорость их вращения регулируется автоматически задатчиком 23. Амплитуда регулируется автоматически с помощью задатчика 24. Угол ϕ разведения дебалансов регулируется автоматически при вращении валов с помощью регулятора 26. В результате автоматически регулируются частота и амплитуда колебаний вибростола, что обеспечивает повышение показателей качества бетонных изделий по прочности, увеличение ресурса работы виброблоков, экономию электроэнергии и строительных материалов, входящих в состав бетонной смеси, сокращение времени виброуплотнения.
Таким образом, проведенный заявителем поиск по научно-техническим и патентным источникам информации аналогов и выбранный из перечня аналогов прототип позволил выявить отличительные признаки в заявленном техническом решении, следовательно, заявляемая виброплощадка с автоматически регулируемой амплитудой удовлетворяет критерию “новизна”.
В обнаруженной информации отсутствуют сведения об указанном техническом результате, из нее не выявляется влияние отличительных признаков на достижение технического результата, следовательно, данное техническое решение удовлетворяет критерию “изобретательский уровень”.
Критерий изобретения “промышленная применимость” подтверждается тем, что использование виброплощадки с автоматически регулируемой амплитудой позволит найти ее широкое применение в производстве строительных материалов, изделий и конструкций.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Строительные машины: Справ.: В 2-х т.T.1.: Машины для строительства промышленных, гражданских сооружений и дорог/ Под общ. ред. Э.Н.Кузина. - 5-е изд., перераб. - М.: Машиностроение, 1991. - С.349.
2. Механическое оборудование предприятий строительных материалов, изделий и конструкций/ С.Г.Силенок, А.А.Борщевский, М.Н.Горбовец. - М.: Машиностроение, 1990 - С.240.
3. C1 2157756 RU В 28 В 1/087 Виброплощадка для уплотнения бетонных смесей в форме/ Галицков С.Я., Голубев В.И., Караваев А.В., Радомский В.М. №98117630; Заявл. 24.09.1998// БИ - 2000. - №29 /.
4. Программируемый контроллер С60/ Техническое описание, - 64.10.060 00 00.000 ТО.- АО Автоваз.
5. Датчики контроля и регулирования: Справ./Д.И.Агейкин, Е.Н.Костина, Н.Н.Кузнецова. - М.: Машиностроение, 1965. - С.500.
6. Устройство управления тиристорное серии БТУ 3601. Паспорт. ОЛХ.468.153.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИБРОПЛОЩАДКА С УПРАВЛЯЕМОЙ ЧАСТОТОЙ И НАПРАВЛЕНИЕМ КОЛЕБАНИЙ | 2003 |
|
RU2236937C1 |
| ДВУХВАЛЬНЫЙ ВИБРОВОЗБУДИТЕЛЬ С ИЗМЕНЯЕМОЙ АМПЛИТУДОЙ КОЛЕБАНИЙ | 2005 |
|
RU2284869C2 |
| ВИБРОПЛОЩАДКА ДЛЯ УПЛОТНЕНИЯ БЕТОННЫХ СМЕСЕЙ В ФОРМЕ | 1998 |
|
RU2157756C2 |
| ВИБРОВОЗБУДИТЕЛЬ С УПРАВЛЯЕМОЙ ЧАСТОТОЙ И НАПРАВЛЕНИЕМ КОЛЕБАНИЙ | 2005 |
|
RU2284870C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ БЕТОННЫХ ИЗДЕЛИЙ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2007 |
|
RU2378108C2 |
| Устройство управления двухроторной вибрационной установкой | 2023 |
|
RU2814415C1 |
| ВИБРОВОЗБУДИТЕЛЬ И СПОСОБ УПРАВЛЕНИЯ НАПРАВЛЕНИЕМ ЕГО КОЛЕБАНИЙ | 2008 |
|
RU2375123C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ И ПОДДЕРЖАНИЯ РЕЗОНАНСНЫХ РЕЖИМОВ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2589639C1 |
| Устройство для регулирования колебаний виброплощадки | 1981 |
|
SU987597A1 |
| Вибрационный сейсмический источник | 1989 |
|
SU1728823A1 |
Изобретение относится к производству строительных материалов и конструкций и предназначено для уплотнения бетонной смеси на вибростоле. Техническим результатом является повышение показателей качества бетонных изделий по прочности, увеличение ресурса работы виброблоков, экономия электроэнергии и строительных материалов, входящих в состав бетонной смеси, сокращение времени виброуплотнения. Для этого виброплощадка содержит рабочий орган - вибростол, установленный посредством упругих прокладок на основании, закрепленный на нижней части вибростола дебалансный вибровозбудитель с двумя соосными валами, приводимыми от двух асинхронных двигателей и системой автоматического управления этими двигателями, в которую включены задатчик частоты вибрирования, задатчик амплитуды колебаний рабочего органа, первый и второй регуляторы системы управления углом поворота вала первого двигателя, оснащенного датчиком угла поворота, первый и второй регуляторы системы управления углом поворота вала второго двигателя, оснащенного датчиком угла поворота, блок суммирования. Причем система автоматического управления вибровозбудителя дополнительно содержит регулятор амплитуды колебаний рабочего органа, датчик вибрации, соединенный с рабочим органом, второй блок суммирования, причем выход задатчика амплитуды колебаний рабочего органа соединен с прямым входом второго блока суммирования, выход которого соединен со входом регулятора амплитуды колебаний, выход которого соединен со вторым входом первого блока суммирования, а выход датчика вибрации соединен с инверсным входом второго блока суммирования. 1 з.п.ф-лы, 4 ил.
| ВИБРОПЛОЩАДКА ДЛЯ УПЛОТНЕНИЯ БЕТОННЫХ СМЕСЕЙ В ФОРМЕ | 1998 |
|
RU2157756C2 |
| Система управления вибрационным устройством для уплотнения бетонной смеси | 1988 |
|
SU1507571A1 |
| Устройство для уплотнения бетонных смесей в форме | 1987 |
|
SU1502312A2 |
| RU 2056278 С1, 20.03.1996 | |||
| RU 2051790 А1, 10.01.1996 | |||
| DE 3709112 С1, 28.01.1988. | |||

