Изобретение относится к производству строительных материалов и предназначено для уплотнения бетонных смесей в форме.
Известен дебалансный вибровозбудитель со встроенным электродвигателем, включающий в себя асинхронный двигатель, на валу которого расположены спаренные дебалансы одинаковой массы (см. под ред. Э.Н.Кузина. Строительные машины. Том 1. Машины для строительства промышленных, гражданских сооружений и дорог. - М.: Машиностроение, 1991, с.349)[1].
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного устройства, относится то, что в известном устройстве используется ручное разведение дебалансов для изменения амплитуды колебаний рабочего органа, что в процессе вибрирования невозможно - необходимо прерывать процесс уплотнения и выключать установку, что приведет к нарушению процесса виброуплотнения бетонной смеси, потере времени и электроэнергии. При использовании одного положения дебалансов на валу двигателя, т. е. уплотнении на одной амплитуде невозможно повысить показатели качества бетона по прочности.
Известен одновальный дебалансный вибровозбудитель с круговой вынуждающей силой, включающий в себя асинхронный двигатель, на концах вала которого закреплено по одному одинаковому дебалансу (см. Вибрации в технике. Том 4. Вибрационные процессы и машины. М.: Машиностроение. 1981, с.236)[2].
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного устройства, относится то, что в известном устройстве используются неспаренные дебалансы, масса которых не изменяется в процессе вибрирования, а следовательно, регулирование амплитуды колебаний рабочего органа невозможно, т.е. повысить показатели качества бетона по прочности невозможно.
Наиболее близким устройством того же назначения к заявленному изобретению по совокупности признаков является резонансная виброплощадка для уплотнения бетонных смесей в форме, включающая рабочий орган - вибростол, соединенный с возбудителем колебаний и установленный посредством упругих прокладок на основании (см. авт. свид. СССР N 2051790, кл. В 28 В 1/08, 1982). [3] -принято за прототип.
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного устройства, относится то, что виброплощадка работает в резонансном режиме, что позволяет получить высокие амплитуды колебаний рабочего органа с бетонной смесью на начальной стадии виброуплотнения. На конечной стадии при этих амплитудах в бетоне начнут происходить деструктивные процессы (расслоение смеси), избежать которые можно снижением амплитуды колебаний, что известное устройство не предусматривает, а, следовательно, нельзя повысить качественные показатели бетона, сэкономить строительные материалы, входящие в состав смеси и сократить время виброуплотнения.
Технический результат - повышение показателей качества бетонных изделий по прочности, экономия электроэнергии и строительных материалов, входящих в состав бетонной смеси, сокращение времени виброуплотнения.
Указанный технический результат при осуществлении изобретения достигается тем, что в известной виброплощадке для уплотнения бетонных смесей в форме, содержащей рабочий орган - вибростол, соединенный с возбудителем колебаний и установленный посредством упругих прокладок на основании, причем возбудитель колебаний снабжен двумя управляемыми соосно установленными асинхронными двигателями с дебалансами и системой автоматического управления этими двигателями, причем в систему управления включены задатчик частоты вибрирования, задатчик амплитуды колебаний рабочего органа, первый и второй регуляторы системы управления углом поворота вала первого двигателя возбудителя колебаний, частотный силовой преобразователь первого двигателя, первый и второй регуляторы системы управления углом поворота вала второго двигателя возбудителя колебаний, частотный силовой преобразователь второго двигателя, первый и второй асинхронные двигатели, снабженные датчиками угла поворота вала двигателя, блок суммирования, причем выход задатчика частоты вибрирования соединен с прямым входом первого регулятора системы управления углом поворота вала первого двигателя и с первым входом блока суммирования, выход задатчика амплитуды колебаний рабочего органа соединен со вторым входом блока суммирования, выход блока суммирования соединен с прямым входом первого регулятора системы управления углом поворота вала второго двигателя, выход первого регулятора системы управления углом поворота вала первого двигателя соединен с прямым входом второго регулятора системы управления углом поворота вала первого двигателя, аналогично, выход первого регулятора системы управления углом поворота вала второго двигателя соединен с прямым входом второго регулятора системы управления углом поворота вала второго двигателя, выход второго регулятора системы управления углом поворота вала первого двигателя соединен со входом частотного силового преобразователя первого двигателя, выход второго регулятора системы управления углом поворота вала второго двигателя соединен со входом частотного силового преобразователя второго двигателя, выход частотного силового преобразователя первого двигателя соединен со входом первого двигателя, выход частотного силового преобразователя второго двигателя соединен со входом второго двигателя, выход первого двигателя соединен с датчиком угла поворота вала первого двигателя, выход второго двигателя соединен с датчиком угла поворота вала второго двигателя, выход датчика угла поворота вала первого двигателя соединен с инверсными входами первого и второго регуляторов системы управления углом поворота вала первого двигателя, выход датчика угла поворота вала второго двигателя соединен с инверсными входами первого и второго регуляторов системы управления углом поворота вала второго двигателя.
На фиг. 1, a, b изображена виброплощадка для уплотнения бетонных смесей, разрез A-A и вид сбоку соответственно; на фиг. 2 показана схема расположения дебалансов; на фиг. 3 изображена структурная схема системы управления.
Виброплощадка содержит рабочий орган - вибростол 1, опалубку с бетонной смесью 2, установленную на рабочем органе. Вибростол 1 посредством упругих прокладок 3 опирается на основание 4. На нижней части стола закреплен возбудитель колебаний 5 с двумя соосно установленными управляемыми асинхронными двигателями - первым двигателем 6 и вторым двигателем 7, на валу первого двигателя установлен дебаланс 8, на валу второго двигателя - дебаланс 9. Двигатель 6 снабжен датчиком угла поворота 10, двигатель 7 снабжен датчиком угла поворота 11.
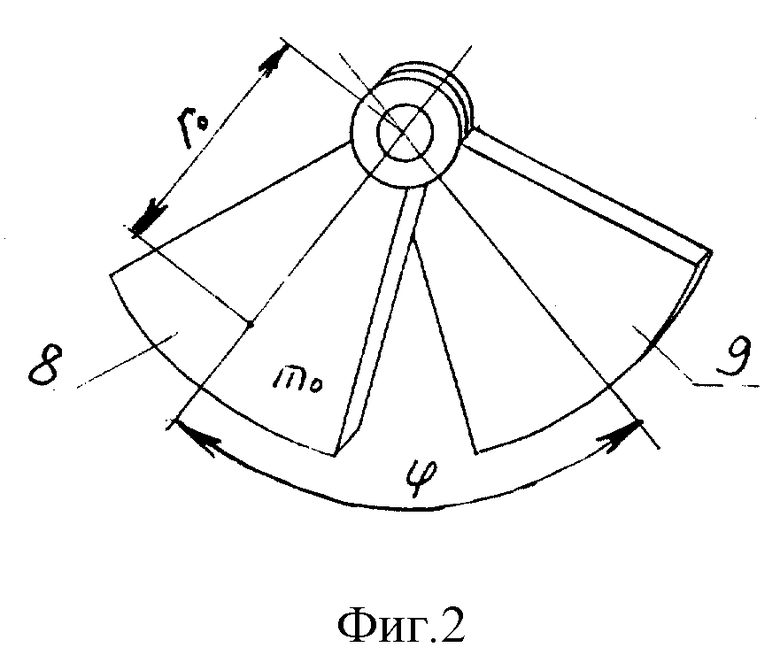
На фиг. 2 показана схема расположения дебалансов. Дебалансы одинаковой массы moрасположены на одной оси, причем дебаланс 8 установлен на двигателе 6, а дебаланс 9 установлен на двигателе 7.
На фиг. 3 изображена структурная схема системы управления синхронным вращением дебалансов и их смещением относительно друг друга в процессе вращения. Она включает в себя задатчик частоты вибрирования 12, задатчик амплитуды колебаний рабочего органа 13, блок суммирования 14, узлы сравнения 15 и 16 соответственно в первом и втором каналах, и два идентичных канала управления, каждый из которых содержит интегральный регулятор 17 и 18 соответственно в первом и втором канале, узел сравнения 19 и 20 соответственно в первом и втором канале, пропорционально-дифференциальный регулятор 21 и 22 соответственно в первом и втором канале, частотный силовой преобразователь 23 и 24 соответственно в первом и втором канале, асинхронный двигатель 6 и 7 соответственно в первом и втором канале, датчик угла поворота вала двигателя 10 и 11 соответственно в первом и втором канале.
Выход задатчика частоты вибрирования 12 соединен с прямым входом узла сравнения 15 и с первым входом блока суммирования 14, выход задатчика амплитуды колебаний 13 соединен со вторым входом блока суммирования 14, выход блока суммирования 14 соединен с прямым входом узла сравнения 16. В прямой цепи первого канала управления последовательно установлены узел сравнения 15, интегральный регулятор 17, узел сравнения 19, пропорционально-дифференциальный регулятор 21, частотный силовой преобразователь 23, асинхронный двигатель 6, а в обратной связи установлен датчик угла поворота вала двигателя 10. Аналогично, в прямой цепи второго канала управления последовательно установлены узел сравнения 16, интегральный регулятор 18, узел сравнения 20, пропорционально-дифференциальный регулятор 22, частотный силовой преобразователь 24, асинхронный двигатель 7, а в обратной связи установлен датчик угла поворота вала двигателя 11. Выход датчика 10 соединен с инверсными входами узлов сравнения 15 и 19, а выход датчика 11 соединен с инверсными входами узлов сравнения 16 и 20.
Задатчик частоты 12, задатчик амплитуды 13, интегральные регуляторы 17 и 18, узлы сравнения 15, 16, 19, 20, пропорционально-дифференциальные регуляторы 21, 22, выполнены, например, программно. Частотные силовые преобразователи 23 и 24 выполнены, например, в виде стандартных транзисторных широтно-частотно-импульсных преобразователей со встроенными стандартными цифроаналоговыми преобразователями, датчики угла поворота 10 и 11 выполнены, например, в виде фотоэлектрических преобразователей типа BE-178. При программной реализации блоков 12, 13, 15, 16, 17, 18, 19, 20 может быть использован, например, программируемый контроллер С-60, обладающий необходимым количеством встроенных цифроаналоговых преобразователей и устройств сопряжения с фотоэлектрическими датчиками угла.
Установка работает следующим образом. По заданному закону изменения частоты колебаний вибростола νзад и амплитуды колебаний Xзад на выходе задатчика частоты 12 формируется сигнал задания угла поворота вала первого двигателя α1зад= ψ(νзад) , а на выходе задатчика амплитуды 13 формируется сигнал задания угла рассогласования дебалансов ϕзад= ψ(Xзад) , далее сигнал ϕзад суммируется c α1зад в узле суммирования 14, что дает на его выходе сигнал задания угла поворота вала второго двигателя α2зад
Выходные сигналы с задатчика 12 и сумматора 14 поступают соответственно на входы следящих приводов первого и второго двигателей. Сигнал с выхода сумматора 15 подается на вход интегрального регулятора 17, который необходим для придания следящей системе требуемого быстродействия. Сигнал с выхода сумматора 19 поступает на вход пропорционально-дифференциального регулятора 21, который предназначен для компенсации наибольшей постоянной времени объекта управления. Сигнал с регулятора 21 подается на вход частотного силового преобразователя 23, который изменяет частоту и амплитуду напряжения питания асинхронного двигателя 6 и тем самым регулирует его скорость вращения и угол поворота вала двигателя и, соответственно, угол поворота дебаланса 8. На выходе первого двигателя формируется действительное значение угла поворота его вала α1, которое контролируется с помощью датчика 10.
Сигнал с выхода сумматора 16 подается на вход интегрального регулятора 18, который необходим для придания следящей системе требуемого быстродействия. Сигнал с выхода сумматора 20 поступает на вход пропорционально-дифференциального регулятора 22, который предназначен для компенсации наибольшей постоянной времени объекта управления. Сигнал с регулятора 22 подается на вход частотного силового преобразователя 24, который изменяет частоту и амплитуду напряжения питания асинхронного двигатели 7 и тем самым регулирует его скорость вращения и угол поворота вала двигателя и, соответственно, угол поворота дебаланса 9. На выходе второго двигателя формируется действительное значение угла поворота его вала α2 , которое контролируется с помощью датчика 11. Разность α1 и α2 дает действительный угол ϕ разведения дебалансов 8 и 9 (фиг.2), который должен быть близким по значению с ϕзад.
Дебалансы 8 и 9 вращаются синхронно с равной скоростью. Скорость их вращения регулируется автоматически задатчиком 12. Угол ϕ разведения дебалансов (фиг.2) регулируется автоматически при вращении дебалансов с помощью задатчика 13. В результате автоматически регулируются частота и амплитуда колебаний вибростола.
Источники информации
1. Строительные машины. Том 1. Машины для строительства промышленных, гражданских сооружений и дорог. Под ред. Кузина Э.Н.- М.: Машиностроение, 1991, с.349.
2. Вибрации в технике. Том 4. Вибрационные процессы и машины. М.: Машиностроение, 1981, с.236.
3. Патент РФ N 2051790, кл. В 28 В 1/08, 1982.

Изобретение относится к производству строительных материалов и предназначено для уплотнения бетонных смесей в форме. Технический результат - повышение качества уплотнения бетонных смесей. Виброплощадка для уплотнения бетонных смесей в форме содержит рабочий орган - вибростол, соединенный с возбудителем колебаний и установленный посредством упругих прокладок на основании. Возбудитель колебаний снабжен двумя управляемыми соосно установленными частотно-регулируемыми асинхронными двигателями и цифровой системой автоматического управления углами поворота этих двигателей. Автоматическая система обеспечивает управление по заданному закону частотой и амплитудой колебаний вибростола. 3 ил.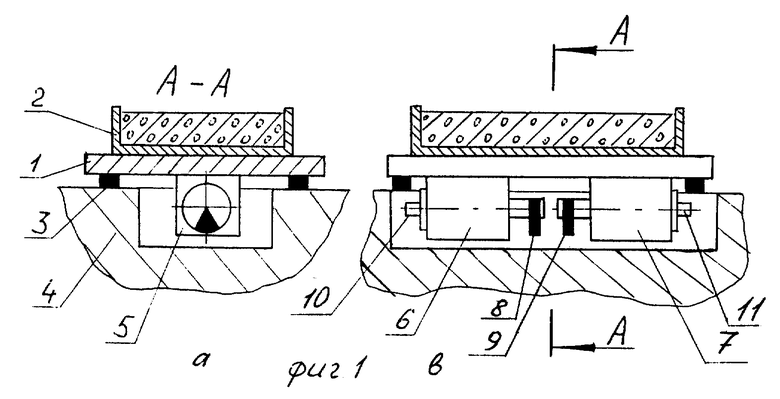
Виброплощадка для уплотнения бетонных смесей в форме, содержащая рабочий орган - вибростол, соединенный с вибровозбудителем колебаний и установленный посредством упругих прокладок на основании, отличающаяся тем, что возбудитель колебаний снабжен двумя управляемыми соосно установленными асинхронными двигателями с дебалансами и системой автоматического управления этими двигателями, причем в систему управления включены задатчик частоты вибрирования, задатчик амплитуды колебаний рабочего органа, первый и второй регуляторы системы управления углом поворота вала первого двигателя возбудителя колебаний, частотный силовой преобразователь первого двигателя, первый и второй регуляторы системы управления углом поворота вала второго двигателя возбудителя колебаний, частотный силовой преобразователь второго двигателя, первый и второй асинхронные двигатели, снабженные датчиками угла поворота вала двигателя, блок суммирования, причем выход задатчика частоты вибрирования соединен с прямым входом первого регулятора системы управления углом поворота вала первого двигателя и с первым входом блока суммирования, выход задатчика амплитуды колебаний рабочего органа соединен со вторым входом блока суммирования, выход блока суммирования соединен с прямым входом первого регулятора системы управления углом поворота вала второго двигателя, выход первого регулятора системы управления углом поворота вала первого двигателя соединен с прямым входом второго регулятора системы управления углом поворота вала первого двигателя, аналогично выход первого регулятора системы управления углом поворота вала второго двигателя соединен с прямым входом второго регулятора системы управления углом поворота вала второго двигателя, выход второго регулятора системы управления углом поворота вала первого двигателя соединен со входом частотного силового преобразователя первого двигателя, выход второго регулятора системы управления углом поворота вала второго двигателя соединен со входом частотного силового преобразователя второго двигателя, выход частотного силового преобразователя первого двигателя соединен со входом первого двигателя, выход частотного силового преобразователя второго двигателя соединен со входом второго двигателя, выход первого двигателя соединен с датчиком угла поворота вала первого двигателя, выход второго двигателя соединен с датчиком угла поворота вала второго двигателя, выход датчика угла поворота вала первого двигателя соединен с инверсными входами первого и второго регуляторов системы управления углом поворота вала первого двигателя, выход датчика угла поворота вала второго двигателя соединен с инверсными входами первого и второго регуляторов системы управления углом поворота вала второго двигателя.
| RU 2051790 А1, 10.01.1996 | |||
| Система управления вибрационным устройством для уплотнения бетонной смеси | 1988 |
|
SU1507571A1 |
| Устройство для уплотнения бетонных смесей в форме | 1987 |
|
SU1502312A2 |
| EP 03536661 А1, 02.07.1990 | |||
| Устройство для управления процессом уплотнения бетонных смесей на виброплощадке | 1980 |
|
SU912501A1 |
| DE 3709112 С1, 28.01.1988. | |||

