u
СЛ
00
CO
Изобретение относится к рулевым управлениям колесных транспортных средств и может применяться в автомобилях повышенной проходимости,работающих, преимущественно, в маневровом режиме, а также в спортивных автомобилях типа багги
Цель изобретения - повышение безопасности движения транспортного средства с повышенными скоростями движения
На чертеже изображена функциональная схема рулевого управления„
Вал между рулевым колесом 1 и ру- левым механизмом 2 связан с датчиком крутящего момента 3 и серводвигателем 4„ Датчик 3 представляет собой упругий элемент с наклеенными на него тензосопротивлениями, воспринимающим нагрузку с рулевого колеса 1 и преобразующим ее в электрические сигналы, прямо пропорциональные усилию, ксггр- рое затрачивает водитель на поворот управляемых колес„
Выход датчика крутящего момента 3 соединен с усилителем 5 мощности. Усилитель 5 мощности подключен к серводвигателю 4 через коммутатор 6«Управляющий вход последнего является выходом компаратора 7„ Первый вход компаратора 7 соединен с выходом сум-1- матора 8, а второй вход - с источником 9 порогового напряжения компаратора. Первый вход сумматора 8 соеди- нен с источником 10 опорного напряжения, а второй вход - через ограничитель 11 с датчиком 12 скорости движения автомобиля
питания серводвигатевается следующей фор
и
(j км ПРИ УСУММ Unop
при U
су««
и
(
DCp
- коэффициент пропорциональности;- напряжение датчика крутящего
момента 3;50
- напряжение на выходе сумма
тора 8;
- пороговое напряжение компаратора, обеспечиваемое
источником 9.
Напряжение U
cvwm
на выходе сумматора 8 описьюается формулой
где Vопорн °п°Рн°е напряжение источника 10;
V - сигнал на выходе ограничителя 1 I .
Ограничитель 11 является односторонним ограничителем входных сигналов по минимуму, поэтому его выходной сигнал Уд связан с сигналом V датчика 12 скорости движения автомобиля следующим соотношением:
(V« IVMMH
ПРИ Vq Ч„„„ ПРИ V« мин
(3)
15 2025
30„. 40
45
где V - напряжение нижнего порога
Т
пропускания ограничителя
И о
Соотношение между сигналами выражается следующим неравенством:
0 VMUH Vnop « Vonopl)
При Uc;,MM U nop на выходе компаратора 7 уровень напряжения соответствует логическому нулю, при сумм 7 и пор уровень напряжения соответствует логической единице Коммутатор представляет собой стандартное релейное переключающее устройство, которое по команде внешнего управляющего сигнала находится в проводящем или непроводящем состоянии.
Рулевое управление работает следующим образом. I
При движении автомобиля со сравнительно невысокими скоростями движения V , т.е. в маневровом режиме,имеем, что выходное напряжение сумматора Чсумлл больше по величине, чем пороговое напряжение Un)f „ Поэтому дискретный сигнал с компаратора 7, соответствующий логической единице,поддерживает коммутатор 6 открытым в це- пи датчик крутящего момента 3 - усилитель мощности 5 - серводвигатель 4, благодаря чему на серводвигателе 4 имеем напряжение
Unwr - К и„км с«ра
(4)
и он работает в режиме усиления, значительно снижая требуемый крутящий момент на рулевом колесе„
Описанная ситуация имеет место до тех пор, пока скорость движения автомобиля не достигнет такой величины, при которой UcyMlv% станет равной или меньшей Unop ,т.е. когда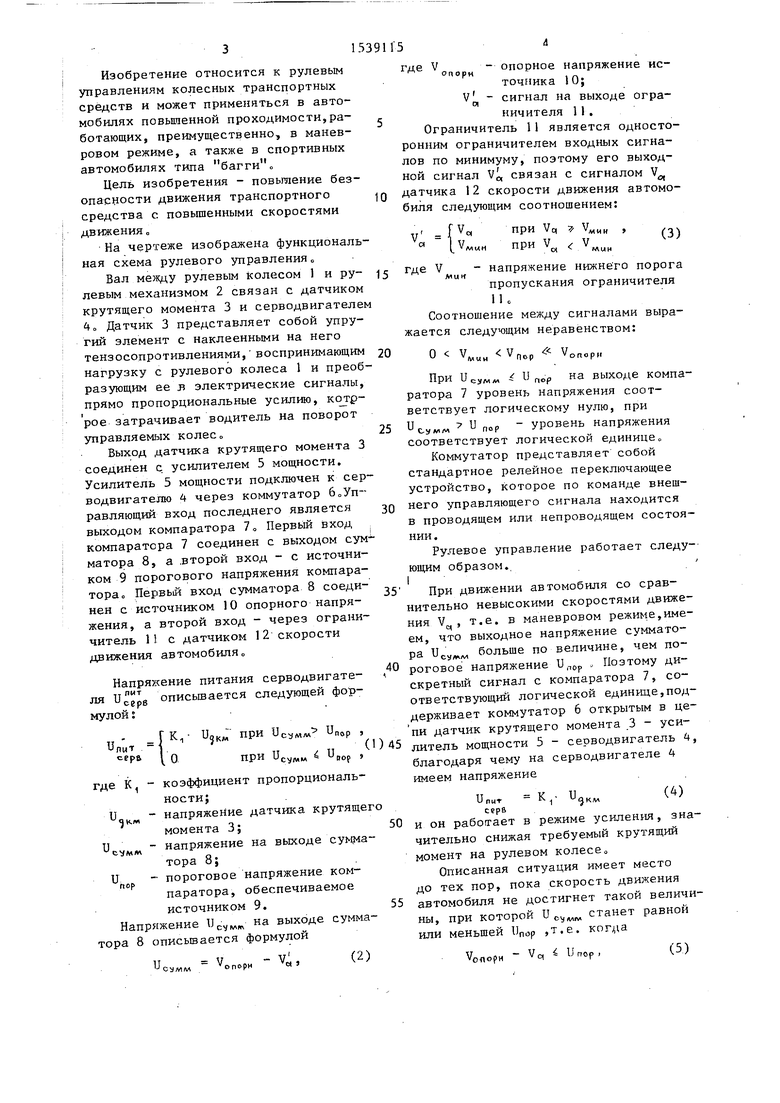
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЛЕВОЕ УПРАВЛЕНИЕ ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2157327C1 |
| Рулевое управление колесного транспортного средства | 1990 |
|
SU1736802A1 |
| Рулевое управление с изменяемым передаточным числом | 1983 |
|
SU1100179A1 |
| Автоматическая система блокировки дифференциала транспортного средства | 1986 |
|
SU1384429A1 |
| Привод муфты сцепления транспортного средства | 1989 |
|
SU1728060A1 |
| Устройство рулевого управления колесного транспортного средства | 1983 |
|
SU1147631A1 |
| РУЛЕВАЯ КОЛОНКА КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА И БЛОК УПРАВЛЕНИЯ РУЛЕВОЙ КОЛОНКОЙ | 2003 |
|
RU2254257C2 |
| Авторулевой | 1988 |
|
SU1579851A1 |
| Устройство для оценки мастерства вождения транспортных средств | 1989 |
|
SU1622889A1 |
| Система автоматического регулирования скольжения ведущих колес транспортного средства в тяговом режиме | 1980 |
|
SU931510A1 |
Изобретение может применяться в автомобилях повышенной проходимости, работающих преимущественно в маневровом режиме, а также в спортивных автомобилях типа "багги". Цель изобретения - повышение безопасности движения транспортного средства с повышенными скоростями движения. Рулевое управление обладает заведомо пониженным угловым передаточным числом рулевого механизма и содержит датчик 3 крутящего момента, усилитель 5 мощности, серводвигатель 4, коммутатор 6, компаратор 7, сумматор 8, источник порогового напряжения компаратора, источник опорного напряжения, ограничитель и датчик 12 скорости движения автомобиля. Новым является то, что серводвигатель 4 на малых скоростях движения автомобиля работает в усилительном режиме, благодаря чему обеспечивается необходимая легкость поворота рулевого колеса, а на больших скоростях - в режиме динамического демпфера, чем обеспечивается стабилизация управляемых колес по скорости действия возмущающих сил. 1 ил.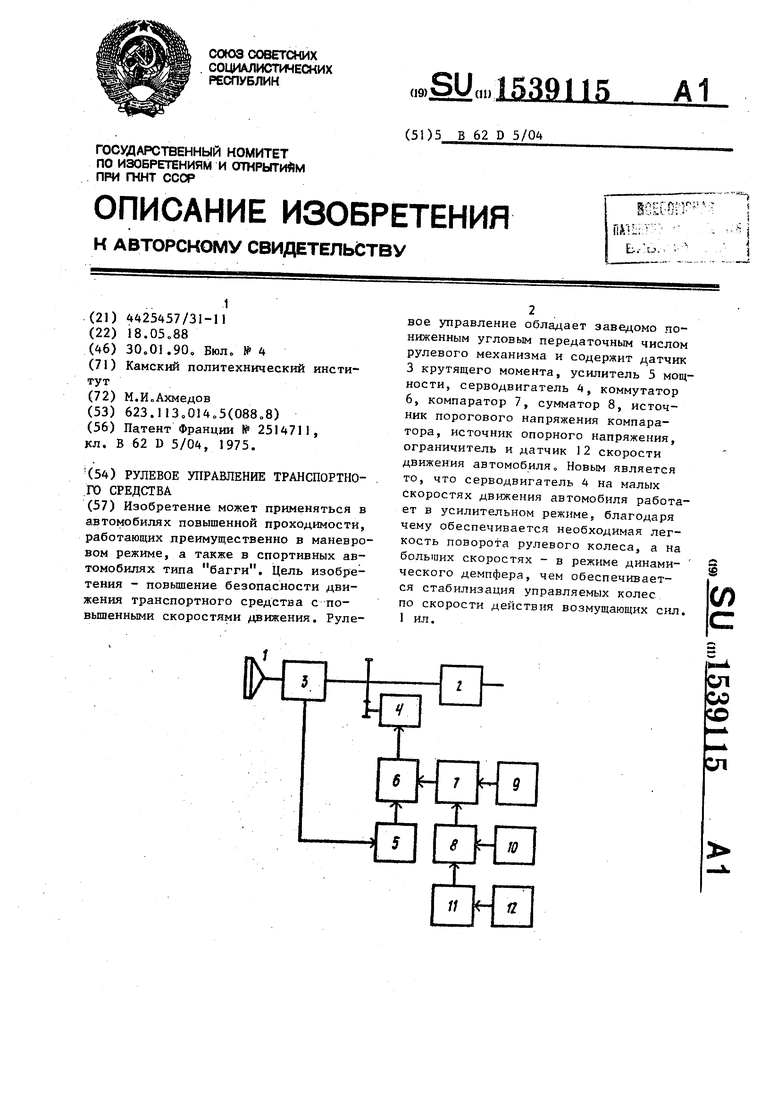
V
опорн
- V,
« 5
(2)
VOflOfH
- Vq 6 U пор i
(5)
515
а это соответствует транспортному режиму движения автомобиля, на выходе компаратора 7 имеем величину напряжения, соответствующую логическому нулю, что позволяет коммутатору прервать электрическую цепь датчик крутящего момента 3 - усилитель мощности 5 - серводвигатель 4 и замкнуть входы обмотки ротора серводвигателя 4 между собой о
Таким образом, во всех случаях движения, которые удовлетворяют условию (5), рулевое колесо 1 кроме момента сопротивления повороту уп- равляемых колес нагружено дополнительным тормозным моментом, величина которого пропорциональна скорости вращения рулевого колеса
3о( рк
мзм - к, -гр(6)
- коэффициент пропорциональ
ности,
скорость поворота рулевого
колеса.
I
Момент М ЭДд возникает в серводвигателе 4 из-за того, что входы обмотки его ротора замкнуты между собой накоротко или через шунты в ней возникает противоЭДС, препятствующая вращению ротора. Момент МЭЛА является динамическим и позволяет стабилизировать управляемые колеса автомобиля по скорости действия возникающих сил со стороны дороги или по скорости вращения рулевого колеса, что повышает безопасность движения
При движении автомобиля задним ходом серводвигатель 4 работает в режиме усиления и напряжение на нем
Составитель В.Ионова Редактор МсНедолуженко Техред Л.Сердюкова Корректор М.Шароши
Заказ 187
Тираж 439
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
156
описывается формулой ( 4 ) ввиду того,
что напряжение сумматора
иг
ОПорИ мин
Jcyw/« всегда больше порогового напряже(7)
ния U
ilO|J
Q
15
20
25
30
35
40
Формула изобретения
а выход - с одним из входов сумматора.
Подписное
| СПОСОБ ИЗГОТОВЛЕНИЯ КОНСЕРВОВ "КОТЛЕТЫ ИЗ САРДИНЫ РЫБООВОЩНЫЕ В ТОМАТНОМ СОУСЕ" | 2012 |
|
RU2514711C1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
