Изобретение относится к области измерительной техники и может быть использовано для определения расхода жидких сред с помощью электромагнитных расходомеров.
Известные способы определения расхода жидкости с использованием электромагнитных расходомеров включают возбуждение электромагнитного поля в потоке контролируемой жидкости, измерение наведенной на системе электродов ЭДС и формирование информационного сигнала, пропорционального расходу контролируемой жидкости (см. пат. США N 3479871, 73-194, 1969).
Недостатком известных способов определения расхода является их высокая энергоемкость, обусловленная тем, что величину напряженности возбуждаемого поля (величину тока возбуждения) выбирают из условия достижения максимально допустимой для данного прибора погрешности, т.е. максимальной.
Наиболее близким к предложенному является способ определения расхода жидкости, включающий периодическое возбуждение электромагнитного поля в потоке контролируемой жидкости, измерение наведенной на системе электродов ЭДС и формирование информационного (выходного) сигнала по измеренной величине ЭДС, пропорционального контролируемой величине расхода (см. а.с. N 1522041, G 01 F 1/58, 1988).
Недостатком известного способа также является невозможность в полной мере минимизировать мощность, затрачиваемую на возбуждение электромагнитного поля в потоке контролируемой жидкости. Это объясняется тем, что в известном способе снижение мощности, расходуемой на возбуждение поля, достигается за счет импульсной формы тока возбуждения и не зависит от измеряемой величины, условий измерения и т.п. Поэтому, даже допустив, что известный способ обеспечивает декларируемое снижение энергозатрат в два раза, дальнейшего их снижения он не обеспечивает.
Таким образом, техническим результатом, ожидаемым от использования предлагаемого способа является снижение затрат энергии на возбуждение электромагнитного поля в потоке контролируемой жидкости.
1. Указанный результат достигается тем, что в процессе формирования информационного сигнала по полученным значениям ЭДС определяют величину приращения скорости потока контролируемой жидкости за фиксированный интервал времени и изменяют напряженность возбуждаемого электромагнитного поля в зависимости от полученной величины приращения из условия достижения минимума напряженности возбуждаемого электромагнитного поля при заданной для данного текущего значения приращения скорости потока контролируемой жидкости величине погрешности информационного сигнала.
Кроме того, при определении минимума напряженности возбуждаемого электромагнитного поля учитывают текущее значение скорости потока контролируемой жидкости, и/или параметры контролируемой жидкости, и/или параметры процесса измерения, и/или параметры, характеризующие условия измерения скорости потока контролируемой жидкости.
Кроме того, величина приращения скорости потока контролируемой жидкости за фиксированный интервал времени может определяться по текущему значению производной по времени от скорости потока контролируемой жидкости.
При этом изменение напряженности возбуждаемого электромагнитного поля может производиться в зависимости от интегрального значения производной по времени от скорости потока контролируемой жидкости.
Допускается также снижение напряженности возбуждаемого электромагнитного поля производить в случае, когда приращение скорости потока контролируемой жидкости за фиксированный интервал времени меньше порогового значения.
Рекомендуется также изменение напряженности возбуждаемого электромагнитного поля осуществлять в прямо пропорциональной зависимости от величины приращения скорости потока контролируемой жидкости за фиксированный интервал времени.
Кроме того, изменение напряженности возбуждаемого электромагнитного поля может осуществляться дискретно, при выходе величины приращения скорости потока контролируемой жидкости за фиксированный интервал времени из заданного диапазона.
Кроме того, очередное включение напряженности возбуждаемого электромагнитного поля может производиться через интервал времени, обратно пропорциональный текущему значению приращения скорости потока контролируемой жидкости, а промежуточные значения информационного сигнала определяют интерполяцией.
И, наконец, очередное включение напряженности возбуждаемого электромагнитного поля может производиться через интервал времени, пропорциональный интегралу от частного от деления заданной для текущего значения скорости потока контролируемой жидкости погрешности измерения и текущего значения приращения скорости потока контролируемой жидкости за фиксированный интервал времени.
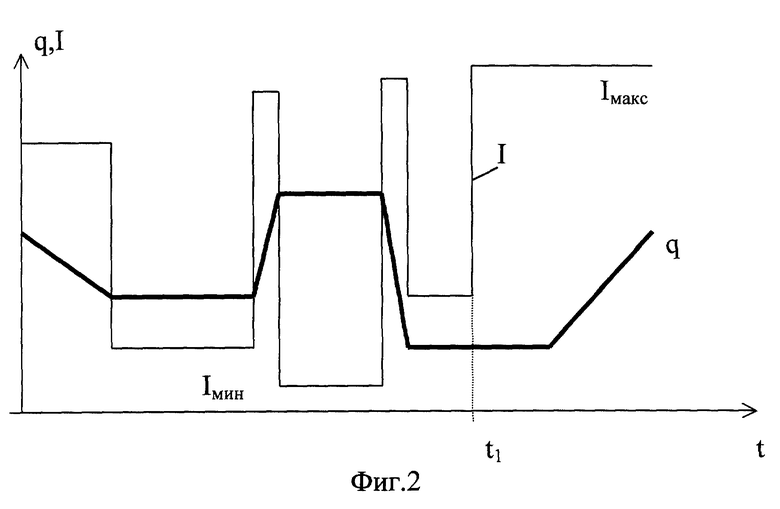
На фиг. 1 приведена блок-схема, поясняющая две возможных реализации устройства для осуществления предлагаемого способа, на фиг.2 показаны зависимости скорости потока контролируемой жидкости и тока возбуждения от времени. Устройство (фиг. 1) содержит систему 1 электродов (два и более электродов), входной преобразователь (АЦП) 2 (одно- или многоканальный), блок 3 обработки, интегратор 4, блок 5 дифференцирования, блок 6 определения скорости изменения, блок 7 масштабирования, функциональный преобразователь 8, выходной преобразователь (ЦАП) 9 (также одно- или многоканальный). Элементы 3-8 образуют процессор 10 с выходной шиной 11 и информационным входом (шиной) 12. Через корпус 13 измерителя протекает поток 14 контролируемой жидкости. Выход преобразователя 9 соединен со входом блока 15 возбуждения. Элементы 1-4 соединены последовательно и образуют измерительный канал. Выход блока 3 соединен также со входом блока 5, выход которого подключен через блок 6 к первому входу блока 7, второй вход которого соединен с шиной 12, а выход - со входом преобразователя 8, последовательно соединенного с преобразователем 9 и блоком 15. Выход блока 3 может быть подключен также ко второму входу блока 8 (фиг. 1). На выходе блока 3 формируется сигнал q, пропорциональный текущему значению скорости потока контролируемой жидкости.
Примеры осуществления способа рассмотрим при описании работы устройства. С помощью блока 15 в рабочем сечении корпуса 13 возбуждается электромагнитное поле. В результате, при протекании потока 14 на системе 1 возникает наведенная ЭДС, амплитуда которой зависит от скорости потока жидкости.
Код (или сигнал), пропорциональный величине ЭДС, поступает на вход процессора 10, где из него формируется величина, пропорциональная скорости потока q, и рассчитывается расход Q. Процессор 10 формирует также код (сигнал), поступающий на преобразователь 9 и определяющий напряженности возбуждающего поля (ток возбуждения). В этой части устройство работает, как любой известный электромагнитный расходомер. Однако в отличие от известных решений в предложении производится регулировка (изменение) тока возбуждения до минимально возможного с учетом приращения величины q за фиксированный интервал времени, т. е. контролируется и используется для снижения потерь энергии скорость изменения расхода. Так, во многих случаях расходомеры используют для определения расхода, длительное время остающегося постоянным или квазипостоянным. В этих условиях современные процессорные средства обработки и фильтрации легко выделяют полезный сигнал на фоне шумов и флуктуаций, что позволяет путем прогнозирования, интерполяции с достаточной точностью рассчитывать общий расход даже при малых величинах тока возбуждения. В то же время все переходные процессы, характеризующиеся значительными приращениями скорости потока, должны отслеживаться с существенно меньшей погрешностью. Процессор 10 может определять величину приращения скорости потока просто как разность соседних ее значений (в более сложном случае интервал, на котором производится определение приращения, должен быть обратно пропорционален предшествующему значению приращения) и устанавливать величину тока по априорно заложенной и/или поступающей на шину 12 зависимости тока от величины приращения (фиг.2).
Независимо от того, выполнен процессор 10 в виде микропроцессорного цифрового блока или аналоговым, его работа может быть описана с использованием блок-схемы, показанной на фиг.1 и отражающей в первом случае один из возможных алгоритмов, а во втором - блок-схему с соответствующими элементами. Поэтому рассмотрим работу устройства, изображенного на фиг.1, более подробно.
Информационная составляющая сигнала, пропорциональная скорости потока q, выделяется в блоке 3 и после масштабирования и интегрирования с постоянной времени t1 поступает на выходную шину 11, определяя расход Q контролируемой жидкости. Тот же сигнал после дифференцирования (или определения приращения за малый интервал времени) в блоке 5 поступает в блок 6, где, например, путем фиксации максимального значения на интервале времени τ или путем интегрирования на том же интервале осуществляется формирование сигнала, пропорционального приращению (скорости изменения) величины q на фиксированном интервале времени. Полученная величина в блоке 7 масштабируется в соответствии с хранящейся в нем и/или поступающей по шине 12 величиной уставки и сигнал приращения скорости потока поступает на вход блока 8, осуществляющего по заданному алгоритму формирование сигнала, через преобразователь 9 управляющего током возбуждения блока 15. В результате при возрастании (или превышении скорости изменения скорости потока контролируемой жидкости некоторой пороговой величины) напряженность возбуждаемого поля (а значит и затраты энергии на его возбуждение) возрастают, а при снижении (не превышении) соответственно снижаются, обеспечивая в то же время нахождение текущего значения погрешности измерения в заданном диапазоне. В предельном случае при достаточном снижении скорости изменения расхода измеритель переходит в режим ожидания, характеризующийся минимально возможным потреблением мощности.
В более сложном случае при определении величины допустимого снижения тока возбуждения может учитываться и величина скорости потока жидкости, поступающая на второй вход блока 8. Возможные алгоритмы формирования сигнала, управляющего величиной тока возбуждения, могут выглядеть следующим образом:
при отсутствии управляющего сигнала на шине 12 текущее значение ∫dq/dt или, при отсутствии блока 6, просто Δ q или dq/dt, формируемое блоком 5, через блок 7 поступает на блок 8, который по заложенной в его память программе, зависимости или коэффициентам, связывающим величину приращения скорости потока с величиной тока возбуждения и формирует сигнал, определяющий ток возбуждения. Например, в простейшем случае ток может определяться выражениями: Iмин < I < Iмакс : I=k• Δ q (фиг.2);
пусть в момент времени t1 на шине 12 появляется код (сигнал), свидетельствующий о необходимости увеличить точность измерения расхода до максимальной (например, вследствие перехода из резервного режима в основной), тогда блок 7 увеличивает до максимального масштабный коэффициент или просто формирует на выходе максимальный выходной сигнал и ток возрастает до максимального (фиг.2);
если при формировании величины тока учитывается и текущее значение скорости потока, например, с целью дополнительно снизить энергозатраты при больших величинах расхода, когда высокой точности измерения не требуется, ток может быть определен из выражения: I=k• Δ q/q. Для больших скоростей потока может осуществляться дополнительное снижение тока возбуждения: I=k• Δ q/q2, а зависимость тока от приращения скорости потока может иметь более сложный вид: I=k• (Δ q)2 и т.п.
Как отмечено выше, наиболее целесообразно использовать в качестве преобразователей 2 и 9 соответственно аналого-цифровой (АЦП) и цифроаналоговый (ЦАП) преобразователи, а процессор 10 выполнить в виде микропроцессорного блока. В этом случае задача формирования необходимой зависимости тока возбуждения ют текущего значения скорости потока и ее уточнения в процессе настройки прибора существенно упрощается.
Следует пояснить также, что формирование сигнала, пропорционального скорости потока, производится в блоке 3 по любому из известных алгоритмов.
Процессор 10 (блок 8) может производить не только непрерывное, но и дискретное снижение тока возбуждения в зависимости от приращения скорости потока, что существенно упрощает алгоритм формирования сигнала, управляющего величиной тока. Например, весь диапазон изменения приращения скорости потока может быть разбит на несколько областей и каждой поставлено в соответствие фиксированное значение тока, так что процессор 10 после определения приращения фиксирует нахождение полученного значения в том или ином диапазоне и из хранящейся в памяти таблицы выбирает соответствующее значение тока, так что изменение величины тока происходит только при выходе приращения из соответствующего диапазона.
Если в предельном случае процессор 10 устанавливает минимальный ток возбуждения (при длительном отсутствии приращения скорости потока), ток может увеличиваться периодически через интервал времени, пропорциональный допустимой погрешности и обратно пропорциональный прогнозируемому или вводимому через шину 12 тренду расхода. При этом все промежуточные (между моментами увеличения тока) значения расхода вычисляются путем интерполяции, хотя при ненулевом токе возбуждения могут учитываться и измеренные значения.
Еще один возможный алгоритм определения интервала, через который производится импульсное увеличение тока возбуждения может быть задан формулой:
T = k ∫δ /q(t)dt, где k - коэффициент пропорциональности, δ - допустимая погрешность.
Рассмотрение всех вышеприведенных примеров реализации предлагаемого способа позволяет сформулировать существо предложения и, соответственно, алгоритм работы процессора в самом общем виде следующим образом. Как и в известном способе процессор 10 непрерывно (разумеется непрерывность в цифровом сигнальном процессоре не исключает квантования по уровню и времени) производит формирование выходного сигнала, пропорционального расходу контролируемой жидкости. Кроме того, как и в известном способе процессор 10 непрерывно задает величину тока возбуждения. Однако в предложенном способе, в отличие от известных, эта величина тока возбуждения переменная и определяется как минимум функции от целого ряда аргументов, одним из которых является текущее значение приращения скорости потока. Другими аргументами могут быть такие величины, как текущая скорость потока (определяется процессором 10, причем большим величинам скорости потока соответствуют меньшие значения допустимого тока возбуждения), текущее значение проводимости среды (определяется процессором 10 по разности потенциалов между соответствующей парой электродов системы 1, на которые подается ток и которая поступает в процессор 10 через преобразователь 3, или поступает на шину 12), электрохимическая ЭДС (также вычисляется в процессоре 10 по разности потенциалов между соответствующей парой электродов системы 1 или поступает на шину 12), температура окружающей среды (вычисляется процессором по величине ЭДС соответствующего сенсора, поступающей через преобразователь 3, или поступает на шину 12), период дискретизации (квантования) по времени при измерении наведенной ЭДС (q) на системе электродов 1 (задается процессором 10 или является константой для данной реализации), режимные параметры (задаются по шине 12) и прочие факторы, характеризующие контролируемую среду, измерительный тракт и условия измерения и оказывающие влияние на текущую величину погрешности, например, номинальное (заданное) значение погрешности для соответствующего диапазона, требуемое быстродействие и т.д. Данная функция задает минимально допустимое (или близкое к таковому) значение тока возбуждения, позволяющее обеспечить заданную для каждого значения приращения скорости потока (и скорости потока) величину суммарной погрешности измерения, в зависимости от комплекса текущих значений параметров контролируемого сигнала и процесса измерения. Таким образом, в предлагаемом способе в каждый данный момент времени, т. е. для каждого текущего значения приращения скорости потока и всех прочих учитываемых параметров определяется текущее значение погрешности (прежде всего динамические ее составляющие), сравнивается с заданным, после чего параметры измерительного тракта (шаг квантования по времени и/или ток возбуждения) корректируются до момента, когда погрешность измерения окажется меньше заданной, а ток минимальным. Указанную функцию от множества перечисленных аргументов определяют заранее расчетным или экспериментальным путем и заносят в память процессора 10 в виде таблицы или расчетного выражения. В простейшем случае это позволяет каждому текущему значению приращения скорости потока поставить в соответствие минимальное значение тока возбуждения, при котором погрешность измерения еще не превышает заданную для данной точки. В более сложном случае это позволяет дополнительно снизить ток возбуждения за счет вариации периода квантования, учета величины контролируемого сигнала, условий измерения, параметров контролируемой жидкости и прочих условий, измеренных или заданных извне. При этом следует пояснить, что поскольку величина тока возбуждения связывается в данном случае с величиной энергозатрат на возбуждение поля, т.е. некоторым средним, действующим значением тока, а погрешность измерения зависит от амплитудного значения тока в момент осуществления очередного отсчета, выше под термином "величина тока" понимается соответствующая из указанных величин: при расчете точности учитывают амплитуду тока, а при определении минимального значения тока исходят из его энергетических характеристик, среднего, действующего значения. Возможность такого подхода следует из наличия известной связи амплитудного и действующего значений тока при известности (заданности) формы его импульсов (временной диаграммы).
Таким образом, когда измерения осуществляются в определенные моменты времени, не с заданным постоянным, а с текущим переменным шагом квантования по времени, ток возбуждения между моментами измерения отключают, а очередное включение (т.е. шаг квантования по времени) выбирают из вышеприведенных условий или алгоритмов.
Из приведенных примеров ясно, что предлагаемый способ обеспечивает значительное снижение затрат энергии на возбуждение поля в случае контроля постоянных или квазипостоянных расходов.
Изобретение может быть использовано для определения расхода диэлектрических и слабопроводящих жидких сред с помощью электромагнитных расходомеров. В процессе формирования информационного сигнала по значениям ЭДС индукции определяют величину приращения скорости потока контролируемой жидкости за фиксированный интервал времени и изменяют напряженность возбуждаемого электромагнитного поля в зависимости от полученной величины приращения, а также от текущего значения скорости потока, параметров контролируемой жидкости или параметров, характеризующих условия измерения. Изменение напряженности осуществляют из условия достижения ее возможного минимума при заданной для текущего значения приращения скорости потока величине погрешности информационного сигнала. Изобретение обеспечивает значительное снижение затрат энергии на возбуждение поля в случае контроля постоянных или квазипостоянных расходов. 5 з.п. ф-лы, 2 ил.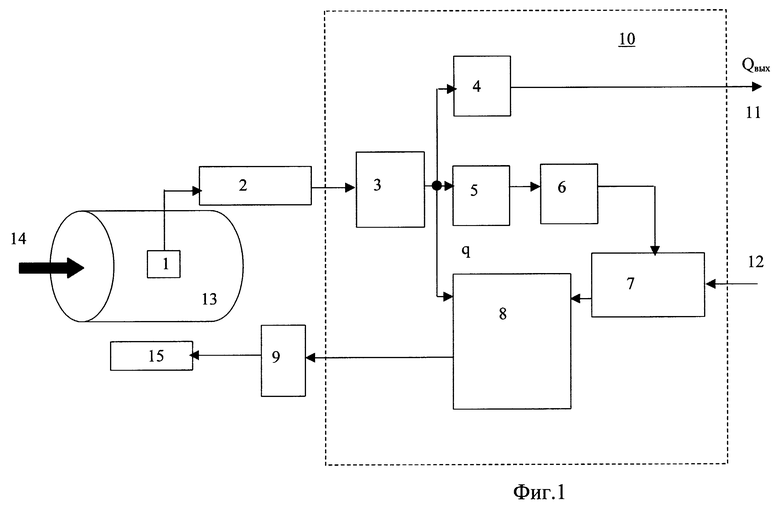
| Электромагнитный расходомер | 1988 |
|
SU1522041A1 |
| US 4726236 А, 23.02.1988 | |||
| УСТРОЙСТВО ВВОДА ИНФОРМАЦИИ С ЭКРАНА ЭЛЕКТРОННО-ЛУЧЕВОЙ ТРУБКИ | 1994 |
|
RU2081449C1 |
| Способ измерения распределения скоростейв потоке жидкости или газа | 1974 |
|
SU509830A1 |
