Изобретение относится к области автомобилестроения и может быть использовано в системе газораспределения двигателей внутреннего сгорания, в том числе дизельных, для управления движением или корректировки положения как впускных, так и выпускных клапанов.
Известна система управления клапанами двигателя МеМЗ-245, включающая кулачки, расположенные на распределительном валу и взаимодействующие с коромыслами, воздействующими на тарелки установленных в направляющих подпружиненных клапанов, рабочие поверхности которых входят в седла клапанов (см. С.М. Круглов. Устройство, техническое обслуживание и ремонт легковых автомобилей. М.: Высш. шк., 1991, с. 30-31 или http:\\zaz.komi.ru\albom\sysgas.htm, сходное решение описано также в патенте по заявке 94026031/06 от 13.07.94 г.). Иными словами, основными элементами известной системы являются механический привод клапана, направляющая и возвратная пружина, которые и обеспечивают заданное перемещение каждого клапана.
Недостатком подобной системы является практическая невозможность регулировки положения и величины хода клапанов в реальном времени в зависимости от числа оборотов двигателя, изменения температуры двигателя, нагрузки и других быстроменяющихся факторов, поскольку регулировка клапанов, производимая путем установки калиброванных шайб, весьма трудоемка. Это, в свою очередь, приводит к снижению мощности двигателя, повышению содержания вредных веществ в выхлопных газах.
В большинстве современных двигателей для частичной компенсации указанных недостатков использованы гидрокомпенсаторы зазоров клапанов (см. напр. http: //gidrovaz. euro. ru/). Таким образом, в данной системе помимо механического привода и возвратной пружины применены гидрокомпенсаторы, также воздействующие на клапан и определяющие его траекторию.
Однако точность компенсации в подобных механизмах недостаточна, что касается прежде всего температурных влияний. В процессе эксплуатации двигателя погрешность выставления зазора возрастает до сотен микрон. Значительному влиянию внешних факторов оказывается подверженным и момент открывания или закрывания клапанов. Все это отрицательно сказывается на мощности двигателя и качестве выхлопа. Кроме того, гидрокомпенсаторы значительно усложняют систему, сами подвержены быстрому износу, приводящему к существенному изменению параметров регулировки. Ограничены и функциональные возможности подобных систем: они не допускают использования в нескольких режимах, учета таких важных факторов, как момент на валу двигателя и т.п.
Таким образом, техническим результатом, ожидаемым от использования изобретения, является повышение точности управления траекторией клапанов и расширение функциональных возможностей системы управления.
Указанный результат достигается тем, что известная система управления клапанами двигателя, содержащая привод клапана и направляющую, снабжена приемопередатчиком ультразвуковых колебаний и контроллером, при этом контроллер выполнен с возможностью задания траектории клапана с учетом информации о влияющих параметрах, привод клапана выполнен управляемым, а выход приемопередатчика ультразвуковых колебаний подключен к первому входу контроллера, выход которого соединен с управляющим входом привода клапана.
При этом клапан может быть выполнен с реперной меткой в месте падения ультразвуковой волны приемопередатчика.
В частности, клапан может быть выполнен с неплоской поверхностью в месте падения ультразвуковой волны приемопередатчика.
Кроме того, привод может быть выполнен электромагнитным.
Целесообразно также приемопередатчик ультразвуковых колебаний выполнить двухчастотным.
Кроме того, приемопередатчик ультразвуковых колебаний может быть выполнен с доплеровским датчиком скорости клапана.
И, наконец, приемопередатчик ультразвуковых колебаний может быть выполнен экранированным.
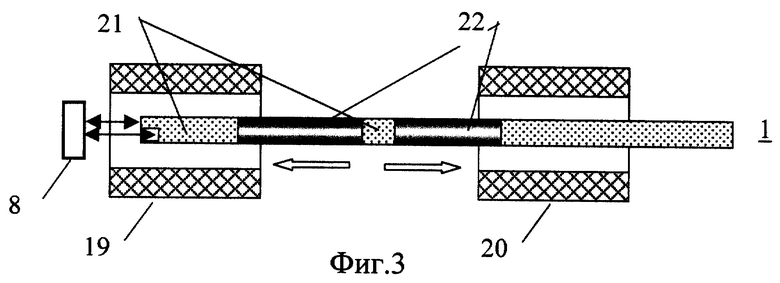
На фиг. 1,2 показаны варианты выполнения системы управления клапанами двигателя. На фиг. 3 показан пример выполнения штока клапана и управляемого привода для случая, когда привод выполнен электромагнитным и осуществляет воздействие как на прямом, так и на обратном ходе клапана. Фиг. 4, 5 иллюстрируют варианты построения контроллера (его процессора). На фиг. 6 схематично показан пример выполнения приемопередатчика. И, наконец, на фиг. 7 приведен пример выполнения контроллера (процессора) и всей системы с использованием аналоговых блоков.
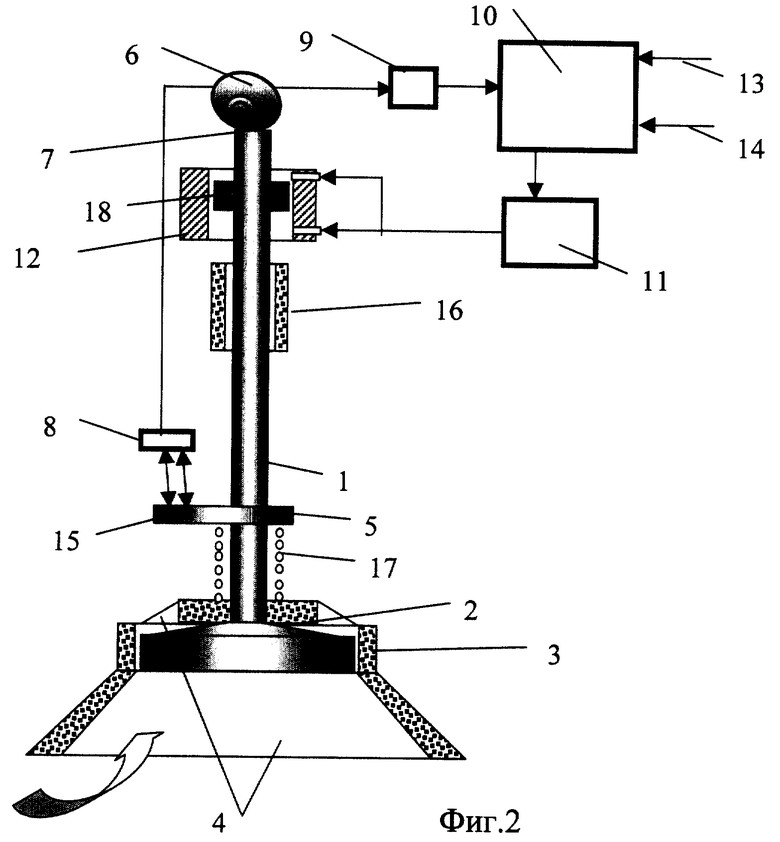
Клапан (фиг. 1 и 2) состоит из штока 1 и головки 2, которая входит в седло (гнездо) 3 с отверстиями 4, через которые топливная смесь или отработанные газы поступают в цилиндр двигателя. Как правило, клапан выполняется с тарелкой (кронштейном) 5, служащей для механического воздействия на шток 1 посредством коромысла 6 (или кулачка, см. фиг. 1) и/или отсчета положения штока 1 (фиг. 2). В варианте по фиг. 1 для отсчета положения служит торцевая поверхность 7 штока, а в варианте по фиг. 2 на нее воздействует коромысло 6.
Система содержит также ультразвуковой приемопередатчик 8, подключенный через входной преобразователь 9 к первому входу процессора 10, выход которого соединен через выходной преобразователь 11 с управляющим входом привода 12 системы управления клапанами.
Процессор 10 может быть выполнен с шиной 13 задания идеальной (требуемой) траектории и шиной 14 ввода информации о влияющих параметрах.
Для получения реперного сигнала шток 1 выполняется с неплоской поверхностью в месте падения ультразвуковой волны приемопередатчика 8, в частном случае с проточкой 15. Перемещение штока 1 происходит в направляющей 16, шток 1 может быть подпружинен пружиной 17. При использовании гидро-или пневмопривода шток 1 может выполняться с поршнем 18. Вместо проточки 15 можно воспользоваться также нанесением материала с отличающимся коэффициентом отражения на часть поверхности штока 1 и т.п.
Для создания разнонаправленных усилий могут использоваться секционированный электромагнитный привод, состоящий из секций 19, 20, и шток 1, содержащий диэлектрические 21 и ферромагнитные 22 участки (фиг. 3).
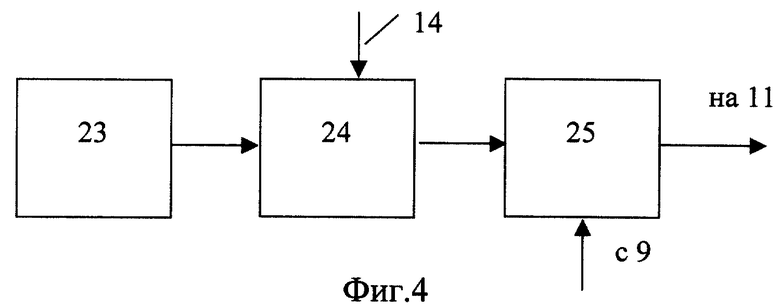
В изображенных на фиг. 1, 2 вариантах выполнения системы контроллер образован блоками 9-11. Процессор 10 (фиг. 4) может включать задатчик 23, блок 24 выборки (коммутации) и блок сравнения 25. Входы блока 24 соединены с выходами задатчика 23 и шиной 14, а выход - с первым входом блока 25, второй вход и выход которого подключены к первому входу и выходу процессора 10 (контроллера) соответственно.
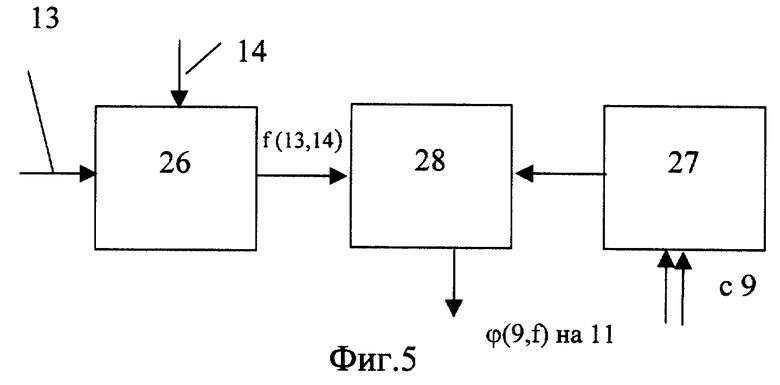
Изображенный на фиг. 5 процессор 10 содержит функциональный блок 26, блок 27 обработки и функциональный блок 28 (в частном случае - блок сравнения), выход которого является выходом процессора 10, первый вход которого соединен со входами блока 27, а второй и третий входы - со входами блока 26. При этом следует учитывать, что соединение входов и выходов, а также шин, в том числе соединение выхода преобразователя 11 со входом управляемого привода 12 или соединения цифровых блоков, в данном описании характеризует только функциональную, информационную связь, но не электрическую, которая осуществляется по известным правилам. Например, преобразователь 11 может иметь два выхода по паре проводников в каждом, соединенных с выводами секций 19, 20 соответствующим образом, обеспечивая прямой и обратный ход клапана, но в функциональном отношении речь идет о наличии одной связи между выходом преобразователя 11 (контроллера) и входом привода 12. Точно также, говоря о подключении шины 14 ко входу процессора 10 (контроллера), мы имеем в виду либо последовательное поступление кодов, связанных с значениями влияющих параметров, в соответствующий входной регистр процессора 10, либо их параллельную запись в несколько регистров.
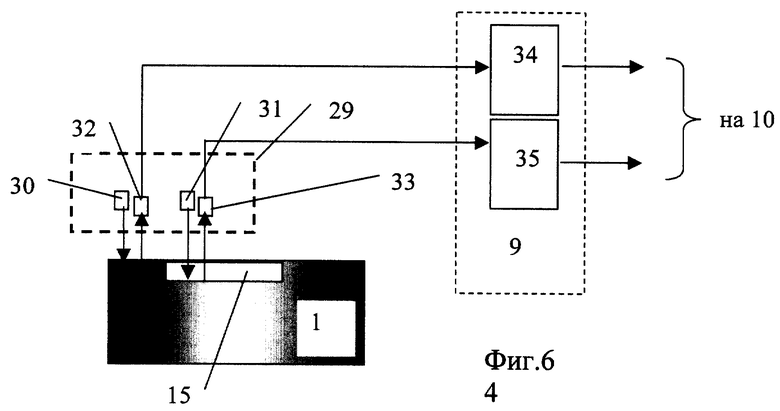
Приемопередатчик 8 (фиг. 6) содержит экран 29, в полости которого размещены излучатели 30, 31 и приемники 32, 33 ультразвуковых колебаний (это могут быть как раздельные элементы, так и части одного излучателя или приемника), сигналы с которых поступают на соответствующие предварительные усилители 34, 35 преобразователя 9, т.е. на вход контроллера.
Если контролируемым параметром является фаза, ее измерение осуществляется в непрерывном режиме, а если временной интервал - в импульсном, причем необходимые в обоих случаях цепи синхронизации процессора 10 и приемопередатчика 8, не показанные на чертежах, выполняются по любой из известных схем. Для измерения скорости штока 1 может быть использован также и классический доплеровский эффект, для чего приемопередатчик 8 выполняется с дополнительным доплеровским датчиком скорости штока 1 (скорость штока 1 может определяться процессором 10 и по разности соседних его положений, т.е. по изменению положения за интервал времени. Более того, данные доплеровского датчика и расчетные могут сопоставляться в процессоре 10 с целью повышения точности и надежности системы.
Точно также в предлагаемой системе могут присутствовать опорные цепи (например, расположенные на неподвижных частях клапанного механизма опорный излучатель и приемник, сигнал с которого служит для исключения аддитивных погрешностей).
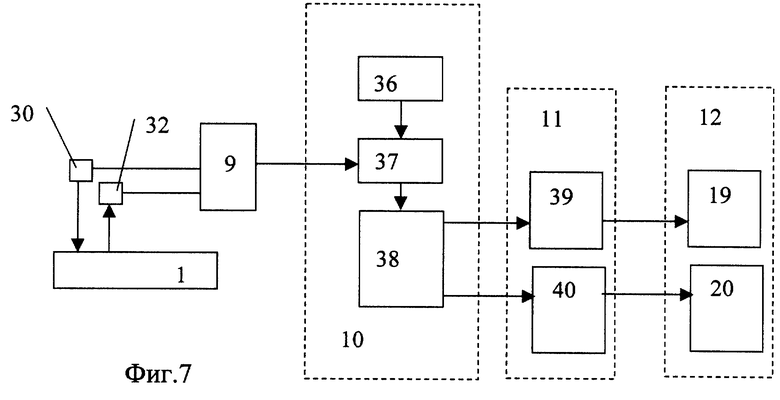
Показанный на фиг. 7 процессор 10 содержит задатчик 36 положения штока 1, выход которого соединен с первым входом дифференциального усилителя 37, второй вход которого подключен к выходу преобразователя 9, выполненного в виде измерителя временных интервалов. Выход усилителя 37 соединен со входом распределителя 38, который через усилители 39, 40 мощности преобразователя 11 подключен к секциям 19, 20 привода 12.
Таким образом, необходимыми элементами предлагаемой системы являются привод и направляющая клапанов. При этом следует пояснить, что управляемый процессором 10 (контроллером) привод 12 может быть электромагнитным (в виде системы катушек, показанной на фиг. 1 и воздействующей на ферромагнитный шток 1), магнитоэлектрическим, гидравлическим или пневматическим (фиг. 2), а также выполнен с использованием любого иного преобразователя электрического сигнала в усилие на штоке 1. В случае использования системы катушек с различным направлением тока в них, шток 1 может выполняться с магнитными вставками для получения разнонаправленных сил воздействия на шток 1 в различные моменты времени.
Кроме того, система может содержать комбинированный привод, состоящий из привода 12 и пружины 17 и/или коромысла 6. Вместо пружины 17 может использоваться возвратная пневмо- или гидросистема. Иными словами, управляемый привод 12 может использоваться как самостоятельно, обеспечивая возвратно-поступательное перемещение штока 1 по заданному процессором 10 (контроллером) закону, так и в комбинации с традиционными средствами привода клапанов. В последнем случае привод 12 используется для коррекции траектории клапана. Однако наиболее просто использовать для закрывания клапана пружину 17, а для открывания - привод 12 в виде катушки, в которую втягивается конец штока 1. В то же время сочетание управляемого привода 12 с механическими средствами открывания клапанов (коромыслами 6) позволяет получить ряд неожиданных эффектов, в том числе сочетание высокой точности работы системы с удвоенной надежностью и экономичностью, что будет более подробно рассмотрено ниже.
Очевидно также, что в реальном двигателе процессор 10 и преобразователи 9, 11 выполняются многоканальными (в частном случае - в виде набора одноканальных блоков) с числом каналов по числу клапанов, в то время как на фиг. 1, 2 представлен только один из каналов и один из клапанов.
Выполнение направляющей 16 может быть любым, например, это может быть не отдельная деталь, как показано на фиг. 1, 2, а отверстие головки блока двигателя, само седло 3 и т.п.
Назначением приемопередатчика 8 является излучение ультразвуковых колебаний (например, импульсов с заполнением частотой 200 - 400 кГц), которые попадают на шток 1 или связанный с ним элемент (кронштейн 5), отражаются от него и преобразуются в приемопередатчике 8 в электрический сигнал, пропорциональный фазе колебаний или времени запаздывания, т.е. несущий информацию о положении штока 1 в пространстве и/или его скорости. Поэтому приемопередатчик 8 может быть выполнен в виде раздельных приемника и передатчика ультразвуковых колебаний или в виде одного элемента, поочередно излучающего и принимающего колебания. Приемопередатчик 8 может быть, например, пьезоэлектрическим или магнитострикционным. Выполнение его с электромагнитным экраном целесообразно не только для защиты от помех, создаваемых электросистемами двигателя и приводом 12 (в случае выполнения последнего электромагнитным ток в катушках достигает значений в десятки ампер), но и для фильтрации возможных ультразвуковых составляющих акустических колебаний, производимых некоторыми типами двигателей. Экран может быть выполнен в виде тонкого напыленного проводящего слоя, таким образом, излучаемые и принимаемые ультразвуковые колебания должны иметь мощность, достаточную для проникновения через пленку, либо из более плотного материала, и тогда в нем предусматриваются отверстия для прохождения ультразвуковых волн.
Выполнение приемопередатчика 8 двухчастотным означает, что он излучает и принимает колебания двух частот, например, содержит два генератора ультразвуковых колебаний и два узкополосных приемника (ограничение полосы может производиться также за счет фильтрации принятого одним приемником сигнала). Различное влияние мешающих факторов на скорость распространения колебаний различной частоты позволяет в процессоре 10 отстроиться от влияния этих факторов.
Преобразователи 9, 11 при описании существа предложения отнесены вместе с процессором 10 к контроллеру. Их назначением является преобразование информации в вид, пригодный для обработки в процессоре 10 и для управления приводом 12 соответственно. При этом преобразователь 9 осуществляет помимо преобразования сигнала из одного вида в другой (например, из аналогового в цифровой) еще и фиксацию интервала времени, пропорционального измеряемому положению штока 1 клапана.
Сам процессор 10 может быть выполнен цифровым или аналоговым, в виде отдельного блока или являться частью бортового контроллера, однако существенным является его выполнение с возможностью задания идеальной (требуемой) траектории движения штока 1 и параметров этой траектории, т.е. положения, а в ряде случаев, и скорости штока в каждый момент времени. Алгоритм его работы (т.е. работы контроллера) будет рассмотрен при описании работы устройства.
В качестве углубления, неплоскостности на отражающей поверхности штока 1 может служить не только проточка 15, но и выборка, уступ, канавка или другие реперные метки, расположенные как на подвижном штоке 1, так и на видимых для приемника частях неподвижных деталей.
Система управления клапанами двигателя функционирует следующим образом.
Пусть в исходный момент времени шток 1 находится в нижнем положении. Сигнал, фиксирующий это положение штока 1 (пропорциональный времени, за которое акустическая волна от приемопередатчика 8 проходит удвоенное расстояние между ним и отсчетной поверхностью штока 1) поступает через преобразователь 9 на вход процессора 10. В последнем хранится информация о моменте, в который необходимо произвести открывание каждого клапана, и в том числе данного, относительно момента прохождения валом двигателя какой-либо точки. Эта информация может храниться в запоминающем устройстве процессора 10 или поступать в него по шине 13. Точно также в процессоре 10 задана информация о положении и скорости штока 1 в последующие моменты времени, причем это задание осуществляется для различных значений влияющих параметров, например, таких как температура окружающей среды и охлаждающей жидкости, скорость движения автомобиля и вращения вала двигателя, включенной в данный момент передаче и т.п.
Информация о влияющих факторах поступает на шину 14 процессора 10, который с учетом этих данных формирует информационный сигнал, задающий идеальную или требуемую траекторию движения штока 1 клапана, сравнивает его с информацией о текущем положении штока 1, который поступает с выхода преобразователя 9, и вырабатывает сигнал управления штоком 1, который после формирования в преобразователе 11 подается на привод 12, например, в виде токового импульса в обмотку катушки. При этом головка 2 клапана поднимается, а пружина 17 сжимается.
В процессе перемещения штока 1, помимо пружины 17 и среды в полости цилиндра двигателя, с которой головка 2 соприкасается через отверстия 4, на положение и скорость штока 1 может влиять сила, действующая на кронштейн 5 со стороны коромысла 6 (вариант комбинированного привода). Поскольку все перечисленные факторы являются переменными и подвержены дрейфу во времени, процессор 10 продолжает непрерывно (или с достаточно высокой тактовой частотой) вырабатывать сигнал управления штоком 1 (сигнал рассогласования между его текущим и требуемым положением), который в каждый момент времени приводит шток 1 в положение, отличающееся от требуемого не более чем на 10-20 мкм.
В варианте комбинированного привода управляемый привод 12 может использоваться для коррекции скорости и момента открытия или закрытия клапана, т. е. в переходных режимах. Причем происходит это автоматически, поскольку, если коромысло 6 воздействует на шток 1 с достаточной силой и в нужный момент времени, сигнал на управляющем входе привода 12 близок к нулю, что способствует повышению экономичности системы. В то же время ее наличие гарантирует точность срабатывания клапана и обеспечивает надежность его функционирования при внезапных или медленных нежелательных изменениях в механической части привода (включая пружину 17).
Использование реперных меток при измерении ультразвуком позволяет исключить влияние среды (пары масла при различной температуре и т.п.). Так, если шток 1 выполнен с неплоской поверхностью, в частности, проточкой 15, то на приемник приемопередатчика 8 поступают два отраженных сигнала - от торцевой поверхности штока 1 (фиг. 1) или поверхности кронштейна 5 (фиг. 2) и дна проточки 15. Использование разностного сигнала (с этой целью используют либо дифференциальный усилитель на входе преобразователя 9, либо осуществляют вычитание в процессоре 10, или формирование иной суперпозиции двух сигналов) при постоянном времени прохождения колебаний от поверхности до дна проточки 15 позволяет исключить погрешность, обусловленную дрейфом параметров приемопередатчика, учесть температурные изменения геометрии штока, а главное устранить погрешность, вызванную изменением характеристик среды, в которой распространяются колебания. Той же цели служит применение двухчастотного приемопередатчика 8. Алгоритм исключения погрешностей становится ясен при рассмотрении уравнений, описывающих оба варианта.
Для случая выполнения штока 1 с проточкой 15 имеем:
H1 = K•V•T1; (1)
H2 = K•V•T2;
H1-H2 = L,
где H1 и H2 - положения торцевой плоскости штока 1 и дна проточки 15 соответственно;
K - коэффициент, характеризующий изменение скорости V распространения колебаний под действием мешающих факторов;
T1 и T2 - измеряемые времена прохождения ультразвуковых колебаний от излучателей 30, 31 до соответствующих приемников 32, 33.
При известности величин V, L система (1) позволяет по измеренным T1 и T2 определить H1, т.е. положение штока 1, исключив величину K.
Аналогично, для двухчастотного приемопередатчика 8 (в нем число приемников и передатчиков удвоено) и плоской торцевой поверхности штока 1 имеем:
H = (V1 + δ )T1; (2)
H = (V2 + M δ )T2,
где M - масштабный коэффициент;
δ - аддитивная составляющая погрешности скорости распространения ультразвуковой волны.
Решение систем уравнений (1) и (2) определяет алгоритм обработки измерительной информации в процессоре 10.
Следовательно, в предложенной системе шток 1 клапана непрерывно находится под действием сил со стороны привода 12, включенного в следящую систему. Наиболее очевидно это на примере аналоговой системы управления, показанной на фиг. 7. В ней излучатель 30 формирует одновременно импульс ультразвуковых колебаний в направлении штока 1 и синхроимпульс, фиксирующий начало отсчета интервала преобразователем 9. Конец измеряемого интервала T фиксируется в момент поступления отраженного импульса по сигналу приемника 32. На выходе преобразователя 9 присутствует сигнал, пропорциональный величине H, характеризующей текущее положение штока 1. В усилителе 37 этот сигнал сравнивается (вычитается из) с сигналом с выхода задатчика 36, который определяет заданное для данного момента времени положение штока 1. В зависимости от знака рассогласования разностный сигнал поступает на тот или иной выход распределителя 38, управляя через усилитель 39 или 40 возвратным или поступательным перемещением штока 1.
Разумеется, в реальной системе могут присутствовать блоки интегрирования и дифференцирования, PID-регулятор, а также более сложные связи, обеспечивающие устойчивость и точность следящих систем, что легче реализовать в случае выполнения процессора 10 цифровым, однако это не отражается на охарактеризованной выше сущности предложения.
Задатчик 23 (фиг. 4) формирует на входе блока 24 набор значений, характеризующих требуемую траекторию штока 1 при различных значениях влияющих параметров, а блок 24 передает на свой выход те из них, что соответствуют значениям этих параметров, присутствующим на шине 14, т.е. блок 24 (блок 24 может быть выполнен в виде дешифратора). Блок 25 формирует сигнал рассогласования между требуемым и текущим положением штока 1, поступающий на вход преобразователя 11.
Те же действия реализуются в процессоре по фиг. 5 несколько иначе. В блоке 26 формируется некоторая функция, заданная первоначально, например, в виде таблицы (блок 26 также может быть выполнен в виде дешифратора) от двух групп аргументов - заданных характеристик движения штока 1 и текущих значений влияющих факторов (сигналов управления, коррекции). Сигналы, поступившие с преобразователя 9 на блок 27, после соответствующей обработки, например выделения информации о положении (или о положении и скорости) штока 1, поступают на вход блока 28 вместе с выходной информацией блока 26 в качестве новых аргументов. Блок 28, в зависимости от значения функции f(13,14) формирует не сигнал рассогласования, как в предыдущем случае, а сигнал более сложной формы, возвращающий шток 1 в заданное положение за минимальное время (этот сигнал характеризуется большей амплитудой переходных процессов).
Таким образом, независимо от того, является ли предлагаемая система вспомогательной или используется самостоятельно (без механических средств привода клапанов двигателя), она позволяет повысить надежность и точность, а значит и существенно повысить мощность двигателя, особенно в переходных режимах, и снизить выбросы вредных веществ в окружающую среду, что достигается прежде всего за счет возможности коррекции положения клапана в реальном масштабе времени. В то же время предлагаемая система управления позволяет полностью отказаться от коромысел, распредвала и иных механических средств управления клапанами, что значительно упрощает двигатель и повышает его надежность.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКУСТИЧЕСКИЙ КОМПЬЮТЕРНЫЙ МАММОГРАФ С ТРЕХМЕРНОЙ ВИЗУАЛИЗАЦИЕЙ | 1998 |
|
RU2139679C1 |
| СПОСОБ ОБМЕНА ДАННЫМИ И УПРАВЛЕНИЯ ВНУТРИТРУБНЫМИ ОБЪЕКТАМИ | 2002 |
|
RU2216686C1 |
| УЛЬТРАЗВУКОВОЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ ФОРМИРОВАНИЯ И ВИЗУАЛИЗАЦИИ ТРЕХМЕРНЫХ ИЗОБРАЖЕНИЙ | 1997 |
|
RU2125836C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И СОСТОЯНИЯ ВНУТРИТРУБНЫХ ОБЪЕКТОВ | 2002 |
|
RU2204760C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ МАРКИРОВАНИЯ И УПРАВЛЕНИЯ ВНУТРИТРУБНЫМИ ОБЪЕКТАМИ | 2002 |
|
RU2215932C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАСХОДОМ ТОПЛИВА В ГАЗОТУРБИННОМ ДВИГАТЕЛЕ | 2001 |
|
RU2198312C2 |
| УСТРОЙСТВО ДЛЯ ИНДИКАЦИИ ПОЛОЖЕНИЯ ВНУТРИТРУБНЫХ ОБЪЕКТОВ И СПОСОБ ЕГО ПРИМЕНЕНИЯ (ВАРИАНТЫ) | 2002 |
|
RU2206815C1 |
| Дистанционно-управляемая система обследования пациентов | 2018 |
|
RU2680796C1 |
| СПОСОБ И СИСТЕМА ПОЛУЧЕНИЯ ДАННЫХ ПРИДОННОЙ РАДИОАКТИВНОСТИ В ГЛУБОКОВОДНЫХ АКВАТОРИЯХ | 2020 |
|
RU2739136C1 |
| Беспилотный летательный аппарат для обработки пестицидами пропашных культур | 2023 |
|
RU2808295C1 |
Изобретение относится к области автомобилестроения и может быть использовано в системе газораспределения двигателей внутреннего сгорания, в том числе дизельных, для управления движением или корректировки положения как впускных, так и выпускных клапанов. Оно позволяет повысить точность управления траекторией клапанов и расширить функциональные возможности системы управления. Система содержит привод клапана и направляющую и снабжена приемопередатчиком ультразвуковых колебаний и контроллером. Контроллер выполнен с возможностью задания траектории клапана с учетом информации о влияющих параметрах. Привод клапана выполнен управляемым, а выход приемопередатчика ультразвуковых колебаний подключен к первому входу контроллера, выход которого соединен с управляющим входом привода клапана. В результате клапан непрерывно находится под действием силы со стороны следящей системы, компенсирующей влияние помехонесущих факторов и приближающей траекторию его движения к идеальной. 6 з.п. ф-лы, 7 ил.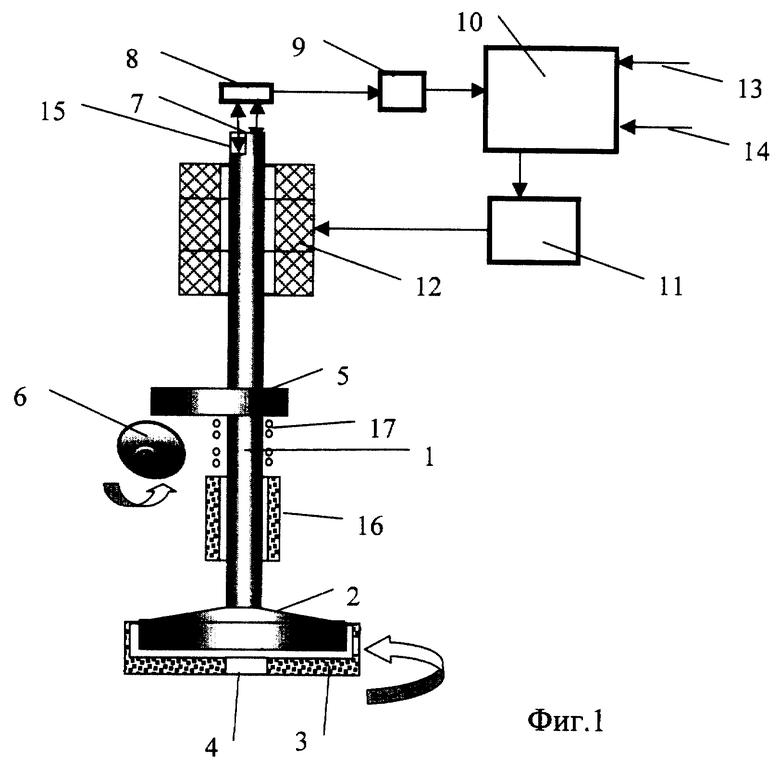
| Система управления клапанами газораспределения с электрогидравлическим приводом | 1981 |
|
SU985338A1 |
| GB 1471537 A, 27.04.1977 | |||
| US 5988123 A, 23.11.1999 | |||
| ИМПУЛЬСНЫЙ ВОДОМЕТНЫЙ НАСОС | 2005 |
|
RU2307958C2 |
| DE 4225329 A1, 18.02.1953. | |||
