Изобретение относится к области радиолокации, а именно к способам вскрытия численного состава группы разрешаемых воздушных целей (ВЦ) при радиолокационном наблюдении.
Известны способы радиолокационного обнаружения группы разрешаемых ВЦ, основанные на изменении периода обзора пространства, в котором предполагается наличие целей /1, 2/. К их недостаткам следует отнести невозможность увеличения темпа обзора в условиях ограниченного энергетического ресурса РЛС и неиспользование информации о целевой обстановке, поступившей не только на последнем k-том обзоре, но и на всех предыдущих, начиная с момента завязки траектории хотя бы одной цели. Кроме того в них не учитывается возможность появления ложных отметок на выходе устройства первичной обработки информации (УПО).
Известен способ определения численного состава группы разрешаемых ВЦ /3/, основанный на использовании отношения правдоподобия для определения численности группы. Недостатками данного способа являются использование его только в случае отсутствия ложных отметок на выходе УПО, использование в способе обнаружения отметок от целей, а не их траекторий, неиспользование информации о целевой обстановке, полученной на обзорах предыдущих k-тому, и сложная реализуемость его при большом числе целей в группе и большом числе элементов разрешения в области пространства, где предполагается наличие группы.
Целью изобретения является увеличение дальности и повышение точности вскрытия численного состава группы разрешаемых ВЦ в условиях ограниченного энергетического ресурса РЛС и наличии ложных отметок от целей на выходе УПО.
Поставленная цель достигается тем, что в способе определения числа разрешаемых ВЦ в группе:
1. В процессе наблюдения группы ВЦ при помощи известных технических решений, осуществляющих до и последетекторную обработку принятого сигнала (ШАРУ, БАРУ, дискриминаторы и т.п.) /4/, фиксируется на заданном неизменном уровне вероятность обнаружения ложных отметок на выходе УПО (Рл.о.), наличие которых обусловлено внутренними шумами приемника.
2. В момент завязывания траектории хотя бы одной цели и на каждом последующем k-том обзоре подсчитывается число одновременно наблюдаемых траекторий mk, измеряется отношение сигнал/шум и дальность для каждой i-той цели (i= 1...mk) xi(k) и di (k) соответственно и с учетом полученных значений радиальной составляющей скорости целей Vri (k) находится величина относительного смещения целей за обзор (1)
(1)
где - To - период обзора пространства РЛС;
Do - дальность обнаружения радиолокационной станцией одиночной цели ожидаемого класса;
Vr - среднее по числу выполненных обзоров значение радиальной составляющей скорости для всех одновременно наблюдаемых траекторий (2)
(2)
3. Из известной характеристики обнаружения определяется значение вероятности обнаружения на k-том обзоре отметки от цели
pk = Р(xk), (3)
где P(x) - заданная характеристика обнаружения РЛС;
- Хk - отношение сигнал/шум на k-том обзоре, которое определяется по измеренным xi (k) и d1 (k) как
xk = f (xi (k), d1 (k)). (4)
Функциональная зависимость (4), необходимость использования которой обусловлена флюктуациями эффективной отражающей поверхности (ЭОП) целей и ошибками измерения величин xi (k) и di (k), может иметь, например, следующий вид
где - a, b - весовые коэффициенты 0 < a < 1, 0 < b <1, а+b=1 характеризующие сравнительную точность определения отношения сигнал/шум и дальности;
Dс/ш=1 - дальность, на которой равно единице отношение сигнал/шум для центрального импульса пачки отраженных сигналов от цели ожидаемого класса.
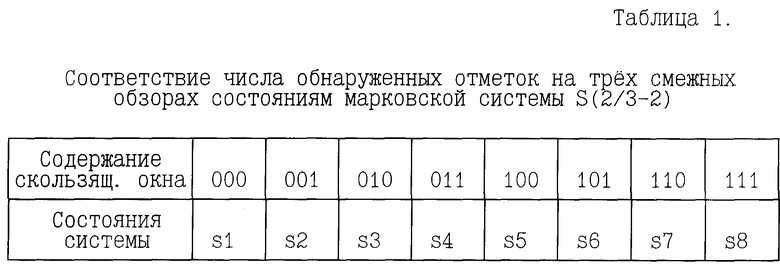
4. Вероятность обнаружения траектории цели определяется вероятностью pk и принятой в радиолокационной станции межобзорной логикой завязывания и сброса траектории U/V-W, где V - необходимое для завязывания траектории число отметок, полученных за U обзоров, a W - необходимое для сброса траектории число подряд идущих пропусков отметок. Например, для логики завязывания и сброса траектории 2/3-2, описывающая процесс завязывания и сопровождения траектории цели, вероятность обнаружения траектории цели на k-том обзоре определяется выражением
Rk = р4(k))+p6(k)+p7(k)+p8(k)+p6(k-1-) • q(k-1), (6)
где - Pj(k), j=1...8 - вероятность нахождения марковской системы S, описывающей процесс обнаружения и сопровождения целей /5/ (фиг. 1) в j-том состоянии на k-том обзоре, соответствие содержания скользящего окна состояниям системы поясняет табл. 1;
- Pj(k-1), j = 1...8 - вероятность нахождения системы S в j-том состоянии на обзоре, предыдущем k-тому;
- q(k-1) - вероятность пропуска отметки на обзоре, предыдущем k-тому.
Вероятности состояний Pj (k) находятся из системы уравнений, которая в матричной форме выглядит следующим образом
P(k+1) = P(k) • П(k), ( 7)
где  вектор-строка вероятностей состояний на k-том обзоре;
вектор-строка вероятностей состояний на k-том обзоре;
- П (k) - матрица переходных вероятностей: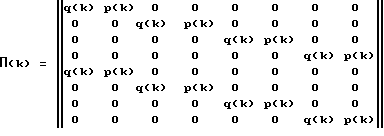 (8)
(8)
5. Последовательно рассматриваются гипотезы g о численном составе группы max(mk)≤ g ≤ gmax, причем
gmax =C • nож-1, (9)
где - nож - ожидаемое число целей в группе;
C ≥ 1 - константа, величина которой определяется степенью достоверности априорной информации о численном составе группы;
- max(mk )- наибольшее значение числа одновременно наблюдаемых траекторий с момента обнаружения хотя бы одной и до k-того обзора включительно.
6. На каждом k-том обзоре области пространства в окрестности обнаруженных целей проверяется выполнение условий
или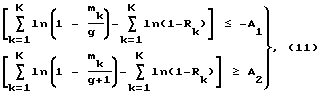
где - mk - число обнаруженных на k-том обзоре траекторий;
- max(mk) - наибольшее значение числа одновременно наблюдаемых траекторий с момента обнаружения хотя бы одной и до k-того обзора включительно;
- g - проверяемая гипотеза о числе целей в группе;
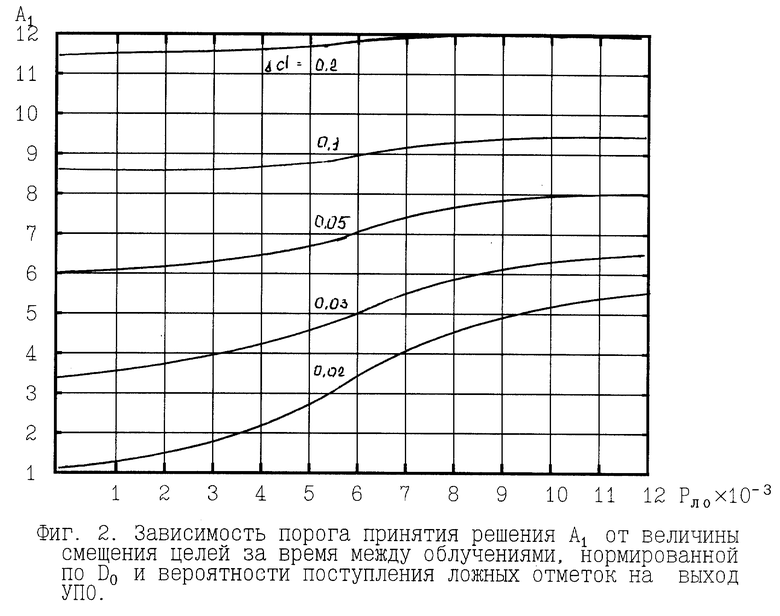
- A1, A2 - нижний и верхний пороги принятия решения, значения которых определяются с учетом величины относительного смещения целей за обзор, вероятности поступления ложной отметки на выходе УПО и требуемой точности принятия решения о численном составе группы.
Значение порога A1 выбирается из графиков фиг. 2. Порог A2 определяется выражением
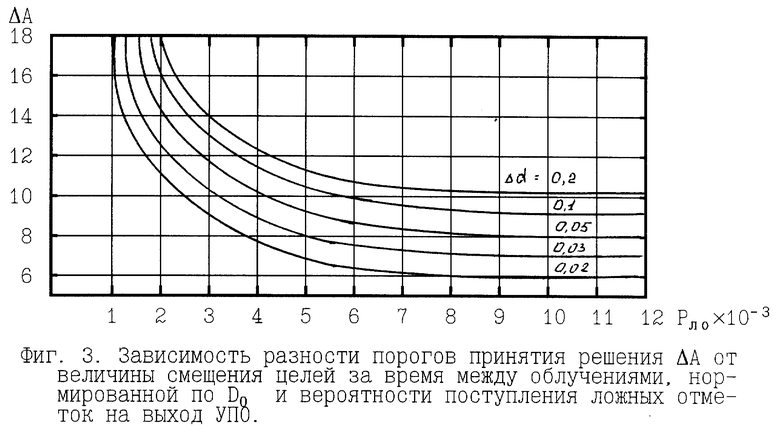
A2= A1+ΔA, (12)
где ΔA - величина отстояния порогов друг от друга, приведенная на фиг. 3.
7. В случае выполнения неравенства (10) принимается решение о числе целей в группе
n = max(mk). (13)
В случае одновременного выполнения неравенств (11) для некоторого g max(mk) < g ≤ gmax принимается решение
n = g. (14)
8. В случае невыполнения неравенств (10) и (11) решение о численном составе группы не принимается и производится следующий обзор пространства.
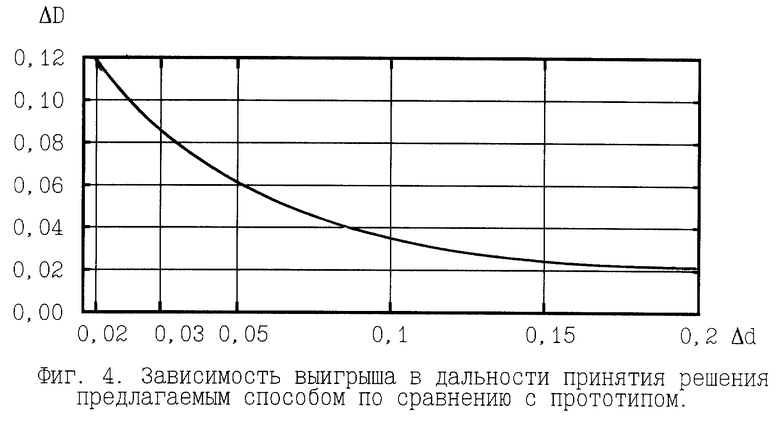
Предлагаемый способ по сравнению с известным /2/ в условиях отсутствия ложных отметок при аналогичной точности принятия решения обеспечивает на 5-20% от Dо большую дальность принятия решения, а при их наличии еще и большую точность. Выигрыш в дальности принятия решения представлен на фиг. 4, а в точности принятия решения в условиях ложных отметок на выходе УПО - на фиг. 5.
Данный способ может быть реализован в устройствах вторичной обработки информации (УВО) при наличии в составе РЛС известных устройств, обеспечивающих постоянную величину Pл.о. на входе УПО.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1. В.Н. Brown, L.Ekchian, L.J.Lawdermit. Adaptive Features and Measurement Requirements. "FASCON'80, Rec, Arlington, Va, 1980", pp. 190-194.
2. Патент RU 2080617 C1 на изобретение "Способ определения количества разрешаемых воздушных целей в группе" МКИ 6 G 01 S 13/02.
3. Трухин М.П., Халили Н.Б. Исследование влияния адаптации на характеристики алгоритма обработки сигналов от групповой цели. Радиотехнические системы локации пространственных объектов, 1984, стр. 27-34.
4. Конторов Д.С., Голубев-Новожилов Ю.С. Введение в радиолокационную системотехнику. - М.: Советское радио, 1971. - 368 с.
5. Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. Сопровождение целей: Пер. с англ. - М.: Радио и связь, 1993. - 320 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСПОЗНАВАНИЯ КЛАССА ВОЗДУШНОЙ ЦЕЛИ | 1999 |
|
RU2150715C1 |
| ГЕНЕРАТОР, ИМИТИРУЮЩИЙ ПОМЕХОВЫЕ СИГНАЛЫ ОТ ДИПОЛЬНЫХ ОТРАЖАТЕЛЕЙ | 2006 |
|
RU2310883C1 |
| СПОСОБ КОРРЕЛЯЦИОННОЙ ОБРАБОТКИ СИГНАЛОВ, ОТРАЖЕННЫХ ОТ БЫСТРОДВИЖУЩИХСЯ ЦЕЛЕЙ | 2005 |
|
RU2293997C1 |
| УСТРОЙСТВО ЭМУЛЯЦИИ РАДИОЛОКАЦИОННОЙ СТАНЦИИ С АКТИВНЫМ ОТВЕТОМ, СОПРЯЖЕННОЙ С ОБЗОРНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2004 |
|
RU2268477C2 |
| ГЕНЕРАТОР ФЛЮКТУИРУЮЩИХ СИГНАЛОВ ЦЕЛЕЙ | 2002 |
|
RU2253129C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ НИЗКОЛЕТЯЩИХ ЦЕЛЕЙ ПО ДАННЫМ ОТ АВТОНОМНЫХ РАДИОЛОКАТОРОВ | 2003 |
|
RU2241240C1 |
| ГЕНЕРАТОР СИГНАЛОВ ИМПУЛЬСНЫХ ПОМЕХ | 2001 |
|
RU2186407C1 |
| Способ двухэтапного радиолокационного обнаружения цели | 2016 |
|
RU2636578C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2019 |
|
RU2710202C1 |
| ГЕНЕРАТОР, ИМИТИРУЮЩИЙ СИГНАЛЫ ОБЗОРНОЙ КОРАБЕЛЬНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ, ОТРАЖЕННЫЕ ОТ БЕРЕГОВОЙ ЛИНИИ | 2005 |
|
RU2303795C2 |

Изобретение относится к области радиолокации, а именно к области вскрытия численного состава группы разрешаемых воздушных целей при радиолокационном наблюдении. Технический результат - увеличение дальности вскрытия численного состава группы с заданной точностью в условиях ограниченного энергетического ресурса РЛС и наличия ложных траекторий, вызванных внутренними шумами приемника. Способ основан на использовании методов последовательного статистического анализа для принятия решения о численном составе группы. Новым является использование при вычислении отношений правдоподобия информации о наличии и количестве наблюдаемых траекторий на предыдущих обзорах, начиная с момента завязки хотя бы одной траектории, и порогов принятия решения, учитывающих не только относительное смешение цели и требуемую точность принятия решения, но и возможность наличия ложных траекторий. При этом вероятность обнаружения ложных отметок на выходе УПО фиксируется на заданном уровне в течение всего времени наблюдения. При выполнении условий, характеризующих требуемую достоверность вскрытия численного состава, принимается решение о количестве целей. В случае невыполнения этих условий решение не принимается и производится следующий обзор области пространства, где предполагается наличие группы целей. 5 ил., 1 табл.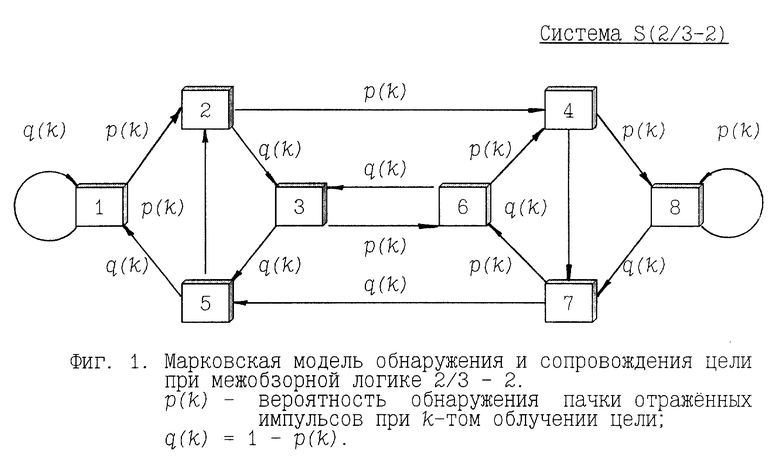
Способ определения числа разрешаемых воздушных целей (n) в группе при радиолокационном наблюдении в условиях наличия ложных траекторий, вызванных внутренними шумами приемника, основанный на принятии решения о численном составе группы методом последовательного статистического анализа, отличающийся тем, что в процессе обнаружения фиксируется на заданном уровне вероятность ложного обнаружения отметок на выходе устройства первичной обработки информации (Рл.о.), в момент завязывания траектории хотя бы одной цели и на каждом последующем k-том обзоре подсчитывается число наблюдаемых траекторий mk, для каждой цели измеряется отношение сигнал/шум Хi(k), - дальность di(k) и радиальная составляющая скорости Vri(k), при выполнении на K-том обзоре неравенств
или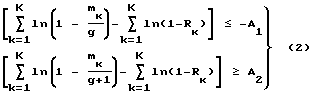
принимается решение о том, что группа состоит из n=max(mk) целей, если выполняется условие (1), или n = g, если одновременно выполняются условия (2), в противном случае решение не принимается и выполняется очередной (k+1)-й обзор пространства, при этом в выражениях (1) и (2) приняты следующие обозначения: g - гипотеза о числе целей в группе, которая для k-того обзора находится в интервале max(mk) ≤ g ≤ gmax, где max(mk) - наибольшее количество одновременно наблюдаемых траекторий до k-того обзора включительно, а gmax определяется с учетом ожидаемого числа целей в группе nож как
gmax=С•nож-1,
где С ≥ 1 - константа, величина которой определяется степенью достоверности априорной информации об ожидаемом числе целей;
Rk - вероятность обнаружения траекторий на k-том обзоре, определяемая используемой межобзорной логикой завязки и сброса траектории, а также вероятностью обнаружения отметки от цели на обзоре Рk, которая определяется по известной характеристике обнаружения
Рk=Р(хk),
где Р(Х) - заданная характеристика обнаружения РЛС;
Хk - уточненное значение отношения сигнал/шум на k-том обзоре, которое является функцией измеренных хi(k) или di(k)
Хk=f(Хi(k), di(k)),
А1, А2 - пороги принятия решения, выбираемые, исходя из требований точности принятия решения, известной вероятности обнаружения ложных отметок и величины относительного смещения целей за обзор Δd, определяемой как
где Vr - среднее по числу выполненных обзоров значение радиальной составляющей скорости для всех одновременно наблюдаемых траекторий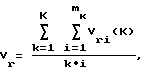
То - период обзора пространства РЛС;
Dо - дальность обнаружения радиолокационной станцией одиночной цели ожидаемого класса.
| ТРУХИН М.П | |||
| и др | |||
| Исследование влияния адаптации на характеристики алгоритма обработки от групповой цели | |||
| Радиотехнические системы локации пространственных объектов, 1994, с.27 - 34 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЛИЧЕСТВА РАЗРЕШАЕМЫХ ВОЗДУШНЫХ ЦЕЛЕЙ В ГРУППЕ | 1993 |
|
RU2080617C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ | 1995 |
|
RU2092868C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ | 1997 |
|
RU2126543C1 |
| US 43777811 А, 22.03.1983 | |||
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОГО ПОЛЯ ПОДВОДНОГО ТРАНСПОРТНОГО ПЛАВСРЕДСТВА | 1995 |
|
RU2080654C1 |
