Изобретение относится к радиолокации и может быть использовано в перспективных РЛС для управления воздушным движением и для контроля воздушного пространства.
Необходимым условием обеспечения этого управления и контроля является знание координат всех объектов, находящихся в контролируемом пространстве, с точностью по дальности 20-30 м, по углам 20-40', а также способность разрешать объекты, разнесенные относительно РЛС на 1-2o.
Кроме того, измеренные координаты при первичном обнаружении должны уточняться в процессе движения объектов, т.е. после обнаружения объекты должны сопровождаться по определенному алгоритму (Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации. М. Радио и связь, 1986, с. 135).
Таким образом, процесс контроля воздушного пространства заключается как в обнаружении объекта, так и в сопровождении при его пролете через контролируемую зону, имеющую обычно угловой размер ΔB360o по азимуту и ΔE30o по углу места.
Выполнение требований по точности измерения координат и разрешающей способности в основном определяют облик РЛС при известном способе радиолокационного обнаружения и сопровождения объектов, что подробно иллюстрируется ниже.
Классический способ выполнения этих функций основан на обзоре заданного пространства с помощью РЛС, имеющей игольчатую форму диаграммы направленности антенны ДНА. Требуемая точность по дальности при этом обеспечивается за счет применения широкополосных сигналов (Справочник по радиолокации под ред. М. Сколника, М. Сов. радио, т. 1, 1976, с. 16).
Точность измерения угловых координат обеспечивают за счет обработки в процессе сопровождения информации, содержащейся в отраженных сигналах, принимаемых при разных направлениях ДНА. Чаще всего применяют одноканальный метод весовой обработки пакета отраженных сигналов (Теоретические основы радиолокации под ред. Я.Д.Ширмана, Сов. радио, М. 1970, с. 276), разновидностью которого является метод определения центра пакета (Там же, с. 284).
Суть метода в том, что отраженные от объекта сигналы, принятые в процессе его сопровождения за счет зондирования l >>1 соседних направлений около объекта, объединяют в единый радиолокационный пакет, а затем определяют координату объекта, как среднее арифметическое значение координат оси антенны, соответствующих началу θн и концу пакета θк т.е.
где
θo угловая координата объекта.
θн, θк угловое направление приема соответственно первого и последнего сигналов пакета.
Среднеквадратичная ошибка измерения угловой координаты будет равна (там же, с. 290):
где
q отношение сигнал/шум;
θA ширина ДНА, определяемая выражением (там же, с. 291)
где
λ длина волны РЛС,
d размер апертуры антенны.
Отсюда
Для выполнения требования σθ0,5o=0,0087 рад необходимо обеспечить
Для длинноволновой РЛС (РЛСд) с λд1 м при d=8 м из (4) получим q  8, что обеспечить вполне реально.
8, что обеспечить вполне реально.
Разрешающая способность Δθo РЛС, в основном, определяется величиной θA поэтому для приведенных выше параметров РЛСд получим, что 
Отсюда следует, что РЛСд с λд1 м не обеспечивает требование по разрешающей способности по угловым координатам. Это означает, что не будет выполнено требование и по точности измерения угловых координат группы неразрешаемых объектов. Действительно, если, например, в момент времени t0 два объекта разнесены на угол Δθр ≅ Δθo то от них будет получен один пакет отраженных сигналов размером (см. чертеж):
где
Δθп1, Δθп2 условный размер пакета отраженных сигналов соответственно от объекта O1 и O2 в случае их разрешения; угловой разнос объектов.
угловой разнос объектов.
В соответствии с (1) РЛСд выдает информацию об обнаружении лишь одного объекта с координатой  т.е. с ошибками
т.е. с ошибками  и
и  Для Δθп1 = Δθп2 величина ошибки будет равна:
Для Δθп1 = Δθп2 величина ошибки будет равна:
Таким образом, выбор соответствующего значения q в (4) может обеспечить требуемую точность измерения угловой координаты лишь одиночного объекта, а для неразрешаемых объектов при этом может быть обеспечена требуемая точность измерения угловой координаты только центра пакета, что не дает информации ни о количестве объектов, ни об из угловых координатах с требуемой точностью.
Для точного измерения угловых координат групповых объектов необходимо выполнить требование по разрешающей способности Δθo1,5o=0,026 рад, т.е. должно быть выполнено соотношение
Для λд1 м из (6) получим d=40 м, что нереализуемо.
Условие (6) легко выполняется в S-диапазоне ( λ7-15 см) (Справочник по радиолокации под ред. М.Сколника, М. Сов. радио, т. 1, 1976, с. 21).
Так, для lк10 см из (6) получим d=4 м, что реализуемо. Таким образом, требование к угловой разрешающей способности определяет выбор длины волны РЛС.
В дальнейшем для примера будем брать значения λд1 м (УВЧ-диапазон) и λк 10 см (S-диапазон) [известно (см. там же), что "большинство РЛС, использующих частоту ниже S-диапазона, применяются для обзора и наблюдения за пространством, в то время как большинство РЛС с частотами выше S-диапазона применяются для получения информации, например, о точном расположении цели, и для сопровождения". "S-диапазон представляет интерес в том смысле, что здесь достижимы разумный компромисс между обнаружением самолетов на средних дальностях и слежением за ним, если для выполнения обеих функций необходимо использовать одну и ту же РЛС] при этом определения "длинноволновая" и коротковолновая" РЛС следует понимать, как относительные, означающие во-первых, что λд > λк а во-вторых, что РЛСд не обеспечивает угловую разрешающую способность, а РЛСк обеспечивает.
Таким образом, известный способ обнаружения и сопровождения объектов с требуемыми точностями и угловой разрешающей способностью основан на обзоре заданного пространства РЛС не ниже S-диапазона при зондировании l>>1 направлений около объекта с использованием широкополосных сигналов.
Работа всех наиболее распространенных современных обзорных РЛС основана на этом способе. В качестве примера РЛС S-диапазона может служить RAT-21S ("Радиоэлектроника за рубежом", N 17, 1980, с. 23), используемая в системах УВД и ПВО. Эта РЛС имеет параметры: λк10 см, размер антенны 4 м x 4 м, ширина луча в горизонтальной плоскости 1,5o, а вертикальной 1,5-3o, обзор пространства по азимуту обеспечивается механическим вращением ФАР со скоростью 6 или 10 об/мин.
Уровень расхода энергии этой РЛСк позволяет обнаруживать воздушные объекты с эффективной площадью рассеяния (ЭПР) σ3 м2 на дальности 100 км и вести сопровождение по мере их приближения.
Затраты энергии РЛСк на один период обзора Tо можно оценить выражением:
Э0к=Э1к•F•Tо
где
Э1к затраты энергии РЛСк на одно зондирование;
F частота зондирования;
Tо период обзора пространства.
Недостаток способа обнаружения и сопровождения объектов в коротковолновом, например, S-диапазоне состоит в необходимости излучения сравнительно большого количества ВЧ-энергии, что приводит к большим затратам энергетических ресурсов и к ухудшению экологической обстановки в зоне расположения РЛС. Особенно этот недостаток проявляется при решении задачи обнаружения и сопровождения малозаметных объектов, под которыми имеются в виду как летательные аппараты с малыми линейными размерами, т.е. с малой ЭПР, так и объекты, созданные по технологии, обеспечивающей их слабую радиозаметность, например, по технологии Stealth (Interavia, 1987, IV, p. 331-33), что эквивалентно также малой ЭПР. Так, если ЭПР малозаметного объекта составляет, например, величину 0,1 м2, то для его обнаружения на дальности 100 км необходимо увеличить затраты энергии RAT-31S в 30 раз. Поэтому компромисс, о котором говорилось выше оказывается неприемлемым; неприемлимо и применение РЛС выше S-диапазона для сопровождения объектов на средних дальностях.
Наиболее близким техническим решением является способ радиолокационного обнаружения и сопровождения объектов, основанный на обзоре пространства длинноволновой РЛС (РЛСд) и передаче данных сопровождения объектов на коротковолновую РЛС (РЛСк), которая после обнаружения по этим данным объекта осуществляет его сопровождение с более высокой разрешающей способностью и точностью измерения координат (Interavia, 1987, IV, p.p. 331-33).
Эффективность способа основана на том, что современные летательные аппараты (ЛА) имеют в длинноволновом диапазоне ЭПР значительно выше, чем в коротковолновом диапазоне. Так, например, в УВЧ-диапазоне (lд=30см-1м, Справочник по радиолокации под ред. М.Сколника, М. Сов. радио, т. 1, 1976, с. 21) ЭПР в 7 раз выше, чем в S-диапазоне, а для перспективных ЛА эта разница составляет 100 раз (БИНТИ N 46 92291), ТАСС 12.11.86).
В статье Effect of Radar Frequtncy on the Detection of Shaped (Low RCS) Targets D.Moraitis, S.Alland, IEEE, 1985, Radar-85, p.p. 159-162. показано, что ЭПР многих радиолокационных объектов может быть представлена зависимостью:
σ ~ λn
где
s ЭПР объекта;
l длина волны РЛС;
n фактор формы объекта.
Для форм объекта с низкой ЭПР, n=2. Там же показано, что дальность обнаружения малозаметных объектов длинноволновыми РЛС увеличивается в 1,75 раза по сравнению с РЛС S-диапазона и в 2,2 раза по сравнению с РЛС более коротковолнового C-диапазона. Это означает, что при прочих равных условиях для зондирования одного направления затраты энергии длинноволновой РЛСд с длиной волны lд могут быть уменьшены по сравнению с затратами РЛСк, с длиной волны λк < λд для n=2
в  раз или с учетом (7)
раз или с учетом (7)
где Эод затраты энергии длинноволновой РЛСд на один период обзора заданного пространства.
Но как уже отмечалось для получения требуемого разрешения объектов по угловым координатам, а значит и для их сопровождения необходимо использовать, как минимум S-диапазон.
Поэтому в способе прототипе предусмотрено, что после обнаружения объекта и сопровождения с достигаемыми РЛС, точностью и разрешением информации передают РЛСк, которая после обнаружения по этим данным ведет его сопровождение с более высокими, чем РЛСд разрешающей способностью и точностью, например, точно так же как и в способе-аналоге, т.е. путем зондирования каждый период обзора l направлений около объекта.
Следует отметить, что РЛСд могла бы вести сопровождение одиночного объекта с требуемой точностью при выполнении условия (4) после того, как с помощью РЛСк уточнили его координаты. Но в способе-прототипе это невыполнимо, поскольку и РЛСк, как и РЛСд, имеет ограниченное значение угловой разрешающей способности, т.е. достоверность информации РЛСк о наличии только одного объекта с уточненными координатами не может быть высокой. Получение РЛСк пакета отраженных сигналов в пределах угловой разрешающей способности лишь означает, что обнаружен один или несколько объектов, которые в процессе полета через контролируемую зону, могут разделиться, т.е. нужно исходить из того, что любой обнаруженный объект в процессе его сопровождения может оказаться групповым. Факт разделения с помощью РЛСк будет обнаружен при меньшем угловом разносе объектов, чем с помощью РЛСд. Поэтому в способе-прототипе регулярное сопровождение всех объектов вынуждены вести с помощью РЛСк.
Экономия затрат энергии на обнаружение РЛСк S-диапазона в способе-прототипе по сравнению в аналогом происходит за счет того, что вместо обзора всего пространства, в процессе которого необходимо было излучать энергию в объеме ΔB•ΔE излучают энергию только в направлениях, в которых РЛСд обнаружила объекты. При этом надежность обнаружения объектов можно обеспечить на уровне надежности обнаружения РЛСд, а точности измерения координат и разрешающей способности на уровне точностей РЛСк.
Объем пространства, где требуется излучать энергию РЛСк для первичного обнаружения с ее помощью объектов (до начала сопровождения их РЛСк) составит величину:
где число новых объектов, обнаруженных РЛСд за текущий период обзора пространства Tо;
число новых объектов, обнаруженных РЛСд за текущий период обзора пространства Tо;
Δθд, Δεд размеры зоны поиска объекта РЛСк соответственно по азимуту и углу места на основе данных РЛСд, определяемые выражением:
где  среднеквадратичные ошибки измерения РЛСд соответственно азимута и угла места.
среднеквадратичные ошибки измерения РЛСд соответственно азимута и угла места.
Таким образом, затраты энергии РЛСк на первичные обнаружение объекта за время Tо до начала его сопровождения в соответствии с (9) составит величину:
где Э объектов.
объектов.
При обнаружении объектов РЛСк определяют более точно их угловые координаты, если это групповые объекты, после чего ведут сопровождение, например, как описано выше, путем зондирования l >>1 направлений вокруг него на каждом периоде обзора. Поскольку надобность в регулярном обзоре пространства с помощью РЛСк в способе-прототипе отпадает (это делают с помощью РЛСд); то зондирование l направлений с применением РЛСк осуществляют только в интересах получения требуемой точности углового сопровождения объектов. Затраты энергии РЛСк за один период обзора на сопровождение Nk размещаемых объектов составляет величину
Э
где Э
где t усредненное время нахождения объекта в контролируемой зоне.
Отсюда общие затраты энергии за время Tо комплекса РЛСд+РЛСк в способе-прототипе на обнаружение и сопровождение объектов на основе (9), (11), (12) и (12а) составят величину:
Выигрыш в общих затратах на обнаружение и сопровождение объектов способа-прототипа W(n) по сравнению с аналогом в соответствии с (7) и (13) будет равен:
Для реальных значений
выигрыш составит величину
W(n)=3,7.
Анализируя (14) можно сделать вывод, что выигрыш для значений параметров (15) ограничивается величиной затрат РЛСк и, в первую очередь, на сопровождение объектов. Действительно в соответствии с (11) и (12), (12а) затраты РЛСк на сопровождение объектов превосходит ее же затраты на первичное их обнаружение:
Для параметров (15) получим:
Недостаток способа-прототипа обнаружения и сопровождения объектов состоит в сравнительно больших затратах энергии коротковолновой РЛС на сопровождение объектов.
Изобретение направлено на решение следующей задачи: сокращение затрат энергии коротковолновой РЛС на сопровождение объекта.
Эта задача решается путем передачи функции регулярного сопровождения объектов на длинноволновую РЛС, которая может совмещать этот процесс с процессом обзора пространства без увеличения затрат энергии, и привлечения к процессу сопровождения РЛСк лишь эпизодически.
Указанный результат достигается тем, что в известном способе радиолокационного обнаружения и сопровождения объектов, основанном на обзоре пространства длинноволновой РЛС (РЛСд) и передачи данных сопровождения на коротковолновую РЛС (РЛСк), согласно изобретению измеряют угловой размер пакета отраженных сигналов РЛСд, принятых от неразрешаемых ею объектов, и угловые координаты его центра, с помощью РЛСк разрешают объекты, привязывают их угловые координаты к угловым координатам центра пакета и сопровождают их с помощью РЛСд по центру пакета, повторяют операции РЛСк после изменения размера пакета.
Таким образом, суть изобретения состоит в следующем. С помощью РЛСд в процессе обзора пространства и сопровождения неразрешаемых объектов в момент времени t0 обнаруживают пакет отраженных сигналов, начало которого соответствует направлению  (см. чертеж), а конец
(см. чертеж), а конец  Вычисляют угловой размер пакета:
Вычисляют угловой размер пакета:
Угловую координату центра пакета  вычисляют в соответствии с (1) и передают эту информацию на РЛСк. С помощью РЛСк при осмотре пространства в пределах угла, ограниченного направлениями
вычисляют в соответствии с (1) и передают эту информацию на РЛСк. С помощью РЛСк при осмотре пространства в пределах угла, ограниченного направлениями  обнаруживают, разрешают, например, два объекта O1 и O2, измеряют угловые направления на них
обнаруживают, разрешают, например, два объекта O1 и O2, измеряют угловые направления на них  привязывают их к угловому направлению центра пакета, определив их, как:
привязывают их к угловому направлению центра пакета, определив их, как:
и при необходимости передают уточненную информацию для сопровождения на РЛСд.
Объем этой информации определяется более детальным распределением функций по выполнению алгоритма сопровождения объекта (см. выше). Если эти функции выполняют полностью на РЛСд, то с РЛСк передают уточненные координаты каждого разрешенного РЛСк объекта, на основании которых на РЛСд проводят экстраполяцию координат и вычисляют размеры стробов сопровождения для каждого объекта. Если эти функции выполняют на РЛСк (имеются ввиду функции по обработке информации, получаемой с РЛСд), то на РЛСд передают информацию в виде координат уже рассчитанных стробов. Если же с помощью РЛСд проводят сопровождение группы объектов в одном общем стробе, т.е. в том же виде, как и до уточнения координат объектов, то уточненную РЛСк информацию могут и не передавать на РЛСд. Конкретный вид передаваемой с РЛСк на РЛСд информации не меняет существа изобретения.
С помощью РЛСд ведут сопровождение объектов O1 и O2 в процессе которого в числе прочих координат в i-й момент времени измеряют размер единого пакета отраженных от них сигналов и угловые координаты его центра в соответствии с (17) и (4):
и определяют угловые координаты объектов в соответствии с (18), если размер пакета в интервале времени ti-t0 не изменился:
Если в процессе сопровождения объектов с помощью РЛСд к моменту времени tj изменится их положение относительно центра пакета (т.е. окажется, что  или
или  ), то в соответствии с (5) изменится и размер пакета, то вновь с помощью РЛСк разрешают объекты O1 и O2 измеряют
), то в соответствии с (5) изменится и размер пакета, то вновь с помощью РЛСк разрешают объекты O1 и O2 измеряют  определяют новые значения
определяют новые значения 
Математическое ожидание N
N
где
Nл число "ложных" обращений РЛСк (т.е. вызванных случайным изменением углового размера пакета отраженных сигналов РЛСд);
Nдг, Nдс число сопровождаемых РЛСд соответственно устойчивых групп неразрешимых РЛСд объектов и случайно образованных групп;
Pпг, Pпс вероятность изменения углового размера пакета за счет относительного маневра объектов внутри группы, соответственно для устойчивых и случайных групп.
Число Nл может задаваться допустимой величиной изменения пакета, числом обзоров m за которые усредняется размер пакета, а также критерием определения начала и конца пакета (см. Теоретические основы радиолокации под ред. Я.Д. Ширмана, М. Сов. радио, 19706 с. 284).
Для оценки эффективности предлагаемого способа примем, что величина допустимого изменения размера пакета устанавливается, исходя из обеспечения Nл=1.
Величина Nдс определяется числом объектов, находящихся в контролируемой зоне, и их законом распределения, что в свою очередь определяется областью применения РЛС. При использовании РЛС для управления воздушным движением, например, в качестве трассового локатора появление двух объектов в неразрешаемом РЛСд объема пространства возможно за счет нарушения режима полета, что мало вероятно и для оценки затрат энергии РЛСк будем считать, что Nдс•Pпc _→ 0 (хотя эта вероятность должна учитываться при организации контроля для обеспечения безопасности движения).
Число устойчивых групп объектов в зоне будет определяться районом расположения локатора. Очевидно, что число таких групп будет больше в районах, приближенных к учебным аэродромам или к приграничным районам, патрулируемым группами самолетов. Для оценки затрат энергии РЛСк будем считать, что
Nдг≈ 0,1 Nк и Pпг≈ 0,1
т. е. что каждый 10-й сопровождаемый РЛСд объект групповой и что вероятность маневра внутри такой группы 0,1 за обзор. Тогда на основании (15), (19) и (20) получим
В соответствии с (12) и (21) для предлагаемого способа затраты энергии РЛСк за один период обзора на уточнение координат объектов из-за изменения сигналов составит величину
Э
и по аналогии с (16) на основе (11); (22) и (15)
Т. е. затраты энергии РЛСк на сопровождение для принятых выше параметров в предлагаемом способе снизились по сравнению со способом-прототипа (см. 16а) в 50 раз и составляют лишь 60% от затрат энергии РЛСк на первичное обнаружение объектов.
Следует отметить, что оценка величины выигрыша проводилась, исходя из предложения, что групповые объекты располагаются в горизонтальной плоскости. Если же в контролируемой зоне может находиться достаточное число групп с расположением в них объектов в двух плоскостях, а угловые точности РЛСд в этих плоскостях сравнимы, то выигрыш может заметно увеличится. Кроме того, выше указывалось, что для обеспечения требуемой точности сопровождения объектов с помощью РЛСд в соответствии с (3) необходимо, чтобы отношение сигнал/шум было не менее q мин. Если же параметры РЛСд обеспечивают на максимальной дальности зоны Dо это отношение  то и для такой РЛСд применим предлагаемый способ, но в зоне начиная с дальности, определяемой выражением:
то и для такой РЛСд применим предлагаемый способ, но в зоне начиная с дальности, определяемой выражением: о
о
Изобретение относится к радиолокации и может быть использовано в перспективных РЛС для управления воздушным движением и для контроля воздушного пространства. В основу изобретения положена техническая задача по обеспечению возможности сопровождения групповых объектов длинноволновой РЛС с низкой разрешающей способностью по угловым координатам. Для этого в известном способе радиолокационного обнаружения и сопровождения объектов, основанном на обзоре пространства длинноволновой РЛС (РЛСд) и передаче данных сопровождения на коротковолновую РЛС (РЛСк), измеряют угловой размер пакета отраженных сигналов РЛСд, принятых от неразрешаемых ею объектов и угловые координаты его центра; с помощью РЛСк разрешают объекты, привязывают их угловые координаты к угловым координатам центра пакета и сопровождают их с помощью РЛСд по центру пакета, повторяют операцию РЛСк после изменения размера пакета. 1 ил.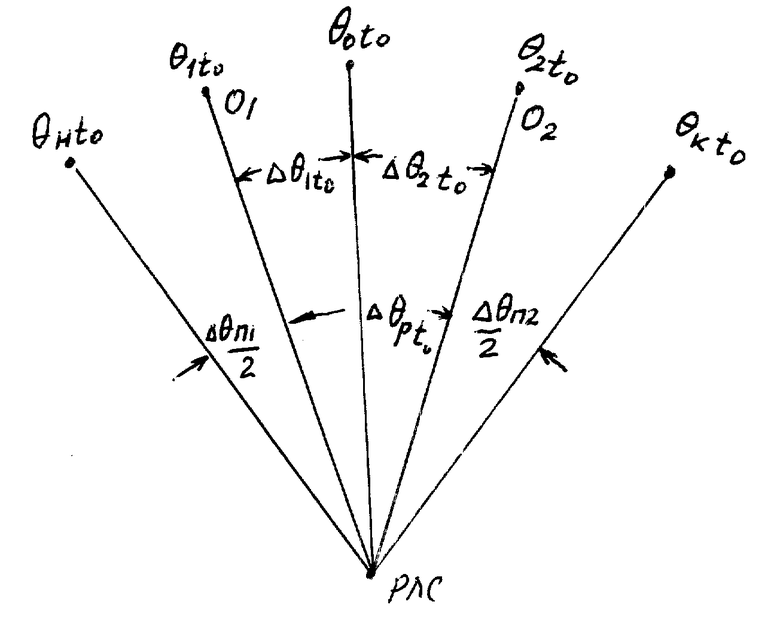
Способ радиолокационного обнаружения и сопровождения объектов, основанный на обзоре пространства длинноволновой РЛС (РЛСд) и передаче данных сопровождения на коротковолновую РЛС (РЛСк), отличающийся тем, что измеряют угловой размер пакета отраженных сигналов РЛСд, принятых от неразрешаемых ею объектов, и угловые координаты его центра, с помощью РЛСк разрешают объекты, привязывают их угловые координаты к угловым координатом центра пакета и сопровождают их с помощью РЛСд по центру пакета, повторяют операции РЛСк после изменения размера пакета.
| Справочник по радиолокации / Под ред | |||
| М | |||
| Сколника, - М.: Сов | |||
| радио, т.1, 1976, с.16 | |||
| Теоретические основы радиолокации / Под ред | |||
| Я.Д | |||
| Ширмана | |||
| - М.: Сов | |||
| радио, 1970, с.276 | |||
| Interavia | |||
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |

