Предлагаемое изобретение относится к области специальной радиотехники и может быть использовано в радио- и гидролокационных системах при определении координат и параметров движения цели (КПДЦ). Как правило, в радио- и гидролокационных системах при корреляционной обработке учитываются дальность и радиальная скорость цели. На практике разрешающая способность локационной системы анализируется на основе функции неопределенности (ФН) Вудворда. В основе такого анализа лежит допущение о постоянстве скорости цели в пределах длительности сигнала и пренебрежимо малых искажениях модулирующей функции. В предлагаемом техническом решении в качестве информативного дополнительного параметра используется радиальное ускорение цели. Возможность измерения радиальной составляющей ускорения рассмотрена в работе [1]. Тамже [1, с.46] показано, что для многих практических задач в выражении для ошибки оценки скорости можно пренебречь членом, зависящим от ускорения. Отметим, что при учете ускорения вид ФН усложняется [2]. В известных технических решениях, предназначенных для разрешения цели по скорости в одном элементе дальности, ускорение как правило не учитывается [3, 4, 5, 6, 7, 8]. При необходимости ускорение цели оценивают косвенно вычислением производной скорости цели по времени [9]. Возможность использования той или иной модели определяется главным образом базой сигнала. Так в работе [10] приведена допустимая доплеровская расстройка в гидролокаторе, составляющая
где Т - длительность сигнала, W - его полоса.
В работе [11, с. 39] необходимость учета n-й производной определяется порядком величины
λ/Тn,
где λ - длина волны. Приближенно полагают, что можно использовать аппроксимацию эффекта Доплера простым сдвигом спектра при выполнении условия 
При увеличении длительности сигналов, полосы частот, скорости целей и размеров антенных устройств подобные приближения оказываются неприемлемыми [12]. Так, например, при работе с низкочастотными, длительными и широкополосными сигналами в гидролокаторах небольшое изменение радиальной скорости за время существования сигнала приводит к декорреляции и существенно сказывается на характеристиках системы [10].
Аналогичный эффект наблюдается в радиолокационных системах слежения за такими быстрыми целями как спутники и управляемые снаряды [13].
В таких случаях возникает необходимость согласования принятого сигнала по ускорению. В работе [11] раскрыт способ определения дальности и радиальной скорости. В среду излучают сигнал с гиперболической ЧМ, смещенный в область несущей частоты, вида:

где f1 - несущая частота, F, k - постоянные.
При приеме осуществляют многоканальную доплеровскую расфильтровку эхосигнала, гетеродинируют сигнал в область низких частот, осуществляют его временную задержку с целью компенсации ошибки в измерении дальности цели, проводят согласованную фильтрацию и отклик сравнивают с порогом.
По временному интервалу между моментами превышения порога и излучения зондирующего импульса определяют дальность цели, по номеру доплеровского канала, где произошло превышение порога, находят радиальную скорость цели. Временной интервал для коррекции ошибки определяется соотношением:

где νp - радиальная скорость, с - скорость распространения волн. Рассмотренный способ позволяет осуществить независимое разрешение по дальности и скорости по одной посылке. Однако при этом сохраняется доплеровская расфильтровка.
Близким по технической сущности к предлагаемому изобретению является система CAVORT (система обработки эхосигналов от целей, обладающих значительным радиальным ускорением) [14]. Эта система работает следующим образом: принятые импульсы пропускают через линию задержки (ЛЗ) на промежуточной частоте с общим числом отводов, где N - число обрабатываемых импульсов. Эти отводы соединены с двумя рядами смесителей. Верхний ряд смесителей производит частотные сдвиги fv, 2fv, 3fv,..., (N-1)fv. Получающиеся сдвиги в любой момент времени заданы с некоторой заданной скоростью цели. Подстройка этого согласования под цели, испытывающие ускорение движения, достигается дальнейшим сдвигом, обеспечиваемым вторым рядом смесителей. Этот нелинейный набор частот Fa, 3fa, 6fa, 10fa,..., N(N+1)fa/2 в любой момент времени согласован по фазе с сигналом для некоторого значения радиального ускорения. Когда fv≫fa, производится поиск по скорости и ускорению так, что характеристики скорости и ускорения цели согласованы в некоторый момент времени на интервале длительностью 1/fa.
Таким образом, рассмотренный способ оценки радиального ускорения цели состоит в следующем. Излучают пачку зондирующих импульсов, принимают, усиливают, производят согласованную фильтрацию по всем возможным значениям радиальных скоростей и ускорений, совмещают эхосигналы во времени и когерентно суммируют, результирующий сигнал сравнивают с пороговым напряжением и по значению фазы сигнала, соответствующего моменту превышения порога, определяют ускорение цели. Данный способ позволяет полностью определить все параметры движения цели (скорость и ускорение).
Недостатком способа является сложность его технической реализации. Поскольку оптимальный фильтр должен быть согласован как с радиальной скоростью, так и c радиальным ускорением, для обработки сигналов с различными парами значений скорости и ускорения необходим набор таких двумерных фильтров. Требуемое число фильтров при этом очень велико и составляет несколько сотен. Кроме того, для работы устройства необходима последовательность (минимум два) зондирующих импульсов.
Наиболее близким к предлагаемому изобретению является способ согласованной фильтрации принятого сигнала [15] (ПРОТОТИП). Рассмотренный способ позволяет выделить сигнал на фоне помехи в условия доплеровского эффекта. Суть способа состоит в следующем. В среду излучают зондирующий импульс. Принятые эхосигнал и сигнал-эталон перемножаются  , где * - представляет собой символ комплексного сопряжения. К результату перемножения применяется преобразование Фурье, в результате которого получают спектральную взаимно корреляционную функцию (ВКФ) вида:
, где * - представляет собой символ комплексного сопряжения. К результату перемножения применяется преобразование Фурье, в результате которого получают спектральную взаимно корреляционную функцию (ВКФ) вида: 
где ν - частотный сдвиг эхосигнала вследствие эффекта Доплера. Если сигналы во временной области вещественные, то соответствующие корреляционные операции в частотной области идентичны операции свертки. Результирующий отклик корреляционной функции сравнивается с пороговым напряжением. Обработка производится в реальном масштабе времени, т.е. отсчеты входной реализации обновляются в соответствии с теоремой Котельникова. Превышение порогового значения происходит в момент компенсации задержки τ=0. При этом принимается решение об обнаружении цели, а сам момент будет соответствовать дистанции до цели. Рассмотренный способ является оптимальный с точки зрения отношения сигнал/помеха для детерминированного сигнала. Однако он не позволяет избежать потерь в отношении сигнал/помеха в условиях переменного доплеровского эффекта. Целью предлагаемого изобретения является повышение помехоустойчивости за счет уменьшения потерь в отношении сигнал/помеха, связанных с переменной доплеровской дисперсией, обусловленной изменением доплеровского параметра в пределах длительности сигнала.
Поставленная цель достигается тем, что способ корреляционной обработки сигналов, отраженных от быстродвижущихся целей, основанный на излучении зондирующего сигнала, корреляционной обработке принятого процесса в реальном масштабе времени, заключающейся в перемножении принятого эхосигнала с копией излученного сигнала, вычислении преобразования Фурье от результата перемножения, нахождении квадрата модуля, сравнении полученного отклика квадрата модуля с пороговым напряжением, дополнительно содержит операции формирования зондирующего сигнала перед излучением по закону s(arctg(t)), где t - текущее время, интерполяции отсчетов принятого сигнала по закону  , выполняемой в пределах временного интервала между двумя соседними отсчетами.
, выполняемой в пределах временного интервала между двумя соседними отсчетами.
Суть способа состоит в следующем. Исходный сигнал, представляющий собой отрезок тонального импульса S(t)=cos(2·π·f0·t), подвергают временному преобразованию по закону  таким образом, в среду излучается сигнал с эллиптической ЧМ от верхних частот к нижним вида:
таким образом, в среду излучается сигнал с эллиптической ЧМ от верхних частот к нижним вида:

где t0 - момент, соответствующий началу сигнала,
f0 - начальная частота,
β - масштабный множитель,

После временного преобразования эхосигнала, отраженного от движущейся цели, осуществляется интерполяция отсчетов принятого сигнала и его взаимнокорреляционная обработка (ВКФ) с сигналом-эталоном в реальном масштабе времени.
Временной интервал между моментами приема и излучения сигнала τ соответствует дальности до цели. Эхосигнал в результате доплеровского преобразования имеет вид

где  - доплеровский параметр,
- доплеровский параметр,
где α - радиальная скорость цели и β - радиальное ускорение цели.
Принимается гипотеза о том, что радиальное ускорение является постоянным, а радиальная скорость меняется в течение длительности импульса. Иными словами дальность r(t) алроксимируется рядом Тейлора с точностью до второго члена разложения. Такой доплеровский эффект будем называть переменным. Переменный доплеровский параметр можно записать в виде:

где r(1)(t)=ν(t) - относительная скорость источника и приемника.
Переменный доплеровский параметр действует на время согласно правилу:

Преобразование времени при текущем доплеровском преобразовании носит функциональный характер.
Другой характеристикой эффекта Доплера является скорость преобразования носителя времени:

Заметим, что значения текущего доплеровского параметра не совпадает со скоростью преобразования носителя времени, но эти функции являются локально близкими. Действительно, разлагая (0.2) в ряд Тейлора и ограничиваясь двумя членами разложения, имеем

Полагая  в (0.4) перепишем
в (0.4) перепишем

Сравнение (0.3) с (0.5) доказывает отмеченное.
Рассмотрим представления сигналов с учетом скорости преобразования носителя времени. Преобразование времени (с точностью до задержки) можно найти путем интегрирования соотношения (0.3)

что совпадает с точностью до задержки с (0.3).
Преобразование времени с учетом параметра β называют переменным доплеровским эффектом [4, 5].
Переменный доплеровский эффект приближенно можно записать в виде одного параметра ϕ

которому соответствует матрица вида:
Действительно, соотношение (0.7) записывается в виде композиции трех матриц:

Первый класс матриц отвечает за сдвиг сигнала во времени, второй - гиперболического типа отвечает за доплеровские преобразования, а третий - за переменный эффект Доплера [5].
Таким образом, группа преобразований, связанная с матрицами (0.9), включает в себя сдвиги, доплеровские преобразования и переменный доплеровский эффект. Из анализа (0.9) следует, что при малом параметре ϕ основной вклад будет давать преобразование  т.е. преобразование, отвечающее за изменение доплеровского параметра во времени. В реальных условиях локации объектов параметр ϕ является малым. А коэффициенты матрицы второго класса имеют второй порядок малости. Действительно при малом параметре
т.е. преобразование, отвечающее за изменение доплеровского параметра во времени. В реальных условиях локации объектов параметр ϕ является малым. А коэффициенты матрицы второго класса имеют второй порядок малости. Действительно при малом параметре  Поскольку система по определению инвариантна относительно сдвига, то коэффициенты первой матрицы не оказывают влияние на преобразование сигнала. Так как сигнал в эллиптическом временном масштабе будет представлять собой отрезок гармонического сигнала, а в обычном временном масштабе он будет являться искаженным, то для его перехода к равномерному масштабу времени нам необходимо произвести интерполяцию отсчетов принятого эллиптического сигнала по тангенциальному закону.
Поскольку система по определению инвариантна относительно сдвига, то коэффициенты первой матрицы не оказывают влияние на преобразование сигнала. Так как сигнал в эллиптическом временном масштабе будет представлять собой отрезок гармонического сигнала, а в обычном временном масштабе он будет являться искаженным, то для его перехода к равномерному масштабу времени нам необходимо произвести интерполяцию отсчетов принятого эллиптического сигнала по тангенциальному закону.
Следующим шагом является выбор сигнала, с большой точностью приближающегося к инвариантному относительно эллиптического преобразования сигнала. Этим сигналом является сигнал вида:

где f0 - эллиптическая частота,
Т - длительность сигнала (0.10), где 
Соотношение (0.10) задает операцию формирования излучаемого сигнала из отрезка тона.
После дискретизации принятого сигнала производится интерполяция по его отсчетам. Этим сигналом является сигнал вида (0.9). Использование этого сигнала обусловлено тем, что в своем масштабе он является отрезком экспоненциального тонального сигнала. Для реализации сигнала в своем масштабе необходимо провести его интерполяцию по закону:

Численный эксперимент показал, что сигнал (0.10) инвариантен относительно эллиптического преобразования. Заметим также, что эталон сигнала для коррелятора должен быть обязательно комплексным 
Устройство, реализующее предлагаемый способ обнаружения и фильтрации эхо-сигналов от быстро движущихся целей, представлено на Фиг.1.
Оно содержит:
Задающий генератор (ЗГ) - 1
Коммутатор - 2
Блок преобразования сигнала по эллиптическому закону - 3
Цифроаналоговый преобразователь (ЦАП) - 4
Излучатель - 5
Первый блок синхронизации - 6
Второй блок синхронизации - 7
Приемник - 8
Аналого-цифровой преобразователь (АЦП) - 9
Элемент задержки (ЭЗ) - 10
Блок интерполяции - 11
Блок перемножения - 12
Блок быстрого преобразования Фурье (БПФ) - 13
Блок вычисления квадрата модуля - 14
Пороговый блок - 15
Блок анализа и принятия решения - 16
ЗГ 1 представляет собой генератор зондирующих импульсов и может быть реализован в цифровом виде [16].
Первый блок синхронизации 6 вырабатывает остроконечные импульсы, определяющие частоту следования зондирующих сигналов. Эти импульсы используются для запуска излучателя и в качестве опорных сигналов дальности, т.е. для измерения времени запаздывания эхосигнала в блоке анализа и принятия решения 16 [17].
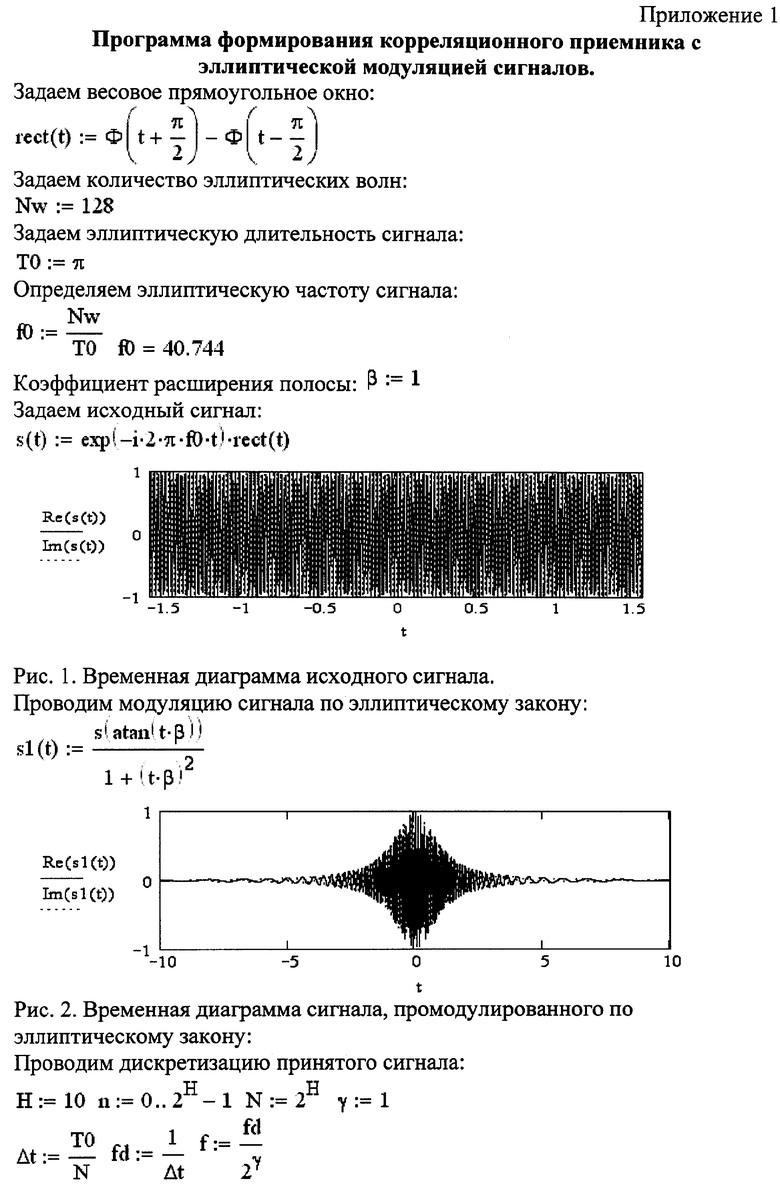
Блок преобразования сигнала по эллиптическому закону 3 выполнен в цифровой реализации и осуществляет преобразование в соответствии с выражением (0.1). Сигнал в эллиптическом масштабе представлен в Приложении 1 (Рис.2). Второй блок синхронизации 7 вырабатывает тактовые импульсы, которые осуществляют синхронизацию работы ЦАП, АЦП, ЭЗ.
ЭЗ 10 обеспечивает обработку входной реализации в реальном масштабе времени. В качестве ЭЗ можно использовать цифровые линии задержки с рециркуляцией (РЛЗ) [18].
Поясним сущность работы элемента задержки на основе РЛЗ. Компенсация задержки τ эхосигнала относительно зондирующего импульса производится следующим образом. На РЛЗ поступают отсчеты входного сигнала с интервалом дискретизации  где fν - верхняя частота среза спектра сигнала. Допустим, что сигнал имеет fν=5 кГц и содержит N=1024 отсчета. Длительность его при этом составит
где fν - верхняя частота среза спектра сигнала. Допустим, что сигнал имеет fν=5 кГц и содержит N=1024 отсчета. Длительность его при этом составит  Если шкала гидролокатора составляет Dmax=30 км, а максимальный интервал корреляции
Если шкала гидролокатора составляет Dmax=30 км, а максимальный интервал корреляции  в этом случае между с моментом излучения и приема сигнала на вход устройства (без учета мертвой зоны) поступит
в этом случае между с моментом излучения и приема сигнала на вход устройства (без учета мертвой зоны) поступит  отсчетов.
отсчетов.
В этой последовательности необходимо выявить отсчеты, соответствующие полезному эхосигналу. Общее время задержки РЛЗ равно (N-1)·ΔT, где ΔT время задержки между соседними отводами.
Интервал дискретизации входного сигнала равен общему времени задержки РЛЗ.
В нашем случае 
На второй РЛЗ непрерывно рециркулирует сигнал-эталон. Полученный очередной отсчет реализации сдвигается вдоль всей первой РЛЗ и рециркулирует таким образом, что оказывается на выходе второго отвода РЛЗ к тому времени, когда будет взят следующий отсчет. После этого процесс повторяется и таким образом на отводах РЛЗ будут находиться последние N-1 отсчетов реализации.
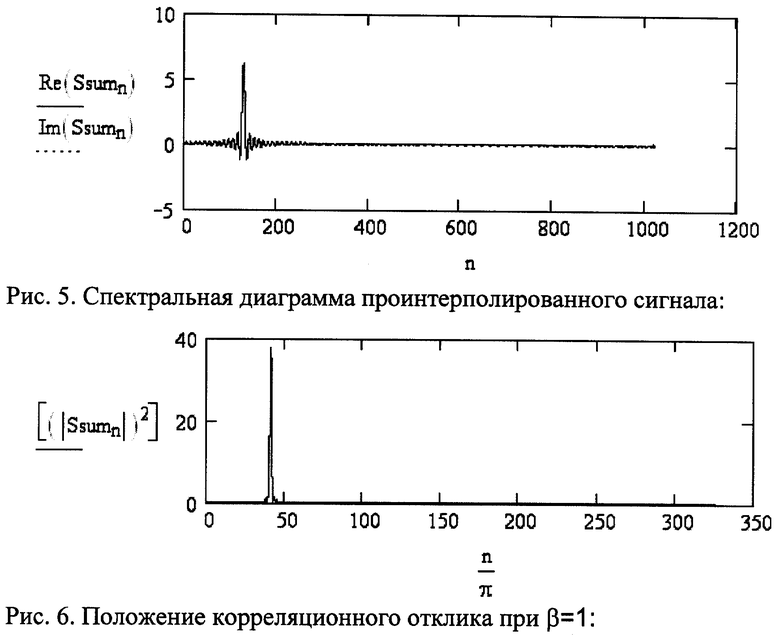
Блок быстрого преобразования Фурье (БПФ) 14 предназначен для нахождения спектральной плотности сигнала и широко распространен в цифровой обработке сигналов [19]. Отклик на выходе блока 19 представляет собой ВКФ, приведенное в Приложении 1 (Рис.6).
Блок интерполяции 11 предназначен для проведения интерполяции отсчетов принятого сигнала и эталона по тангенциальному закону (0.11). Временные диаграммы принятого и интерполированного сигналов приведены в Приложении 1 (Рис.4).
В блоке анализа и принятия решения 16 при превышении порогового значения принимается решение об обнаружении цели, а по измеренному временному интервалу между моментами излучения зондирующего импульса и превышению порога определяется дистанция до цели.
Для проверки достоверности предложенного способа и реализующего его устройства проведено моделирование на ПК в среде MathCad. Результаты моделирования приведены в Приложении 1.
Устройство в целом функционирует следующим образом. Сигнал с выхода генератора зондирующих импульсов 1 поступает в блок преобразования по эллиптическому закону (0.1). Полученный сигнал в эллиптическом масштабе вида (0.1) после цифроаналогового преобразования в блоке 4 через коммутатор 2 по синхроимпульсу из блока синхронизации 6 выдается на излучатель 5 для излучения в среду. Отраженный эхосигнал с выхода АЦП 9 с частотой дискретизации, определяемой теоремой Котельникова fd≥2·fw, поступает на вход ЭЗ 10, где формируется и с каждым новым отсчетом обновляется выборка входной реализации длиной N-1 отсчетов.
В блоке интерполяции 11 производится преобразование входной реализации по закону (0.11), после чего сигнал становится тоном. Сформированная текущая дискретная выборка преобразованного сигнала перемножается с дискретной выборкой копии сигнала-эталона, результат перемножения поступает на вход блока быстрого преобразования Фурье 13. С выхода получаем спектральную взаимно корреляционную функцию

вычисляемую в каждом моменте времени, взятого с дискретностью АЦП на входе приемника, где ν - частотный сдвиг эхосигнала вследствие эффекта Доплера (временная диаграмма показана в Приложении 1). После вычисления квадрата модуля в блоке 14 полученный результат сравнивается с порогом в пороговом блоке 15. При превышении порога в БА и ПР 16 принимается решение о наличие полезного сигнала. Поскольку входная реализация постоянно обновляется, т.е. обработка производится в реальном масштабе времени, измеренный в БА и ПР 16 временной интервал τ между моментами излучения зондирующего сигнала и превышения порога в блоке 16 будет соответствовать дистанции до цели  где с - скорость распространения колебаний.
где с - скорость распространения колебаний.
Литература
1. Келли. Радиолокационное измерение дальности, скорости и ускорения. Зарубежная радиоэлектроника (ЗР), №2, 1962, с.35-46.
2. Справочник по радиолокации. Под ред. Сколника М., Сов. Радио, Том 3, 1976, с.122.
3. А.С. №537315 (СССР) от 30.11.76. Способ определения скорости движения судна относительно дна.
4. Патент №4282589 США, 1981. Корреляционный способ измерения дальности.
5. Патент №3938147 США, 1976. ЧМ доплеровская система измерения дальности.
6. Заявка №1482816 Великобритания. Способ и устройство для измерения доплеровского частотного сдвига.
7. Заявка №2605933 ФРГ. Способ измерения расстояния и скорости, основанный на использовании импульсной доплеровской РЛС.
8. Заявка №56-41953 Япония 1981. Способ и прибор для измерения расстояния с помощью РЛС непрерывного излучения с ЧМ.
9. А.С. №687427 (СССР). Устройство для цифрового анализа сигналов.
10. Крамер. Допустимая расстройка скорости и ускорения в высокочувствительных широкополосных корреляционных гидролокаторах с линейной ЧМ, ТИИЭР т.55 №5, 1967, c.3.
11. Рихачек. Сигналы, допустимые с точки зрения доплеровского эффекта. ТИИЭР т.54 №6, 1966, с.39-41.
12. Рихачек. Разрешение подвижных целей в радиолокации. ЗР №1, 1968, с.3.
13. Келли, Вишнер. Теория согласованной фильтрации целей, движущихся ускоренно с высокими скоростями. ЗР №10, 1965, с.38.
14. Киблер. КЭВОРТ - устройство оптимальной обработки пачечного радиолокационного сигнала с учетом ускорения целей, 1968, с.27-33.
15. Бурдик B.C. Анализ гидроакустических систем. Л., Судостроение. 1988 г., стр.194 (ПРОТОТИП).
16. Найт У. Цифровая обработка сигналов в гидролокационных системах. ТИИЭР т.69 №11, 1981, с.127.
17. Белоцерковский Г. Основы радиолокации и радиолокационные устройства. М., Сов. Радио, 1975, с.25-26.
18. Применение цифровой обработки сигналов под ред. Оппенгейма Э.М. Мир, 1980, с.417-418.
19. Корнеев В., Кисилев А. Современные микропроцессоры. М., Изд. «Нолидж», 1998, с.136-138.
Приложение 1
Программа формирования корреляционного приемника с эллиптической модуляцией сигналов.
Задаем весовое прямоугольное окно:

Задаем количество эллиптических волн:
Nw:=128
Задаем эллиптическую длительность сигнала:
T0:=π
Определяем эллиптическую частоту сигнала:
 f0=40.744
f0=40.744
Коэффициент расширения полосы: β:=1
Задаем исходный сигнал:
s(t):=exp(-i·2·π·f0·t)·rect(t)
Проводим модуляцию сигнала поэллиптическому закону:

Проводим дискретизацию принятого сигнала:
Н:=10 n:=0...2H-1 N:=2H γ:=1



tn:=n·Δt
s2n:=s1(tn)
Dn:=n·Δt


Проведение интерполяции сигнала по тангенциальному закону:

Ssum:=cfft(sumsig)



| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ СИГНАЛОВ ПРИ НАЛИЧИИ ПЕРЕМЕННОГО ДОПЛЕРОВСКОГО ЭФФЕКТА | 2009 |
|
RU2467350C2 |
| СПОСОБ И УСТРОЙСТВО БЫСТРОГО ВЫЧИСЛЕНИЯ ФУНКЦИИ НЕОПРЕДЕЛЕННОСТИ СИГНАЛА С УЧЕТОМ РЕВЕРБЕРАЦИОННОЙ ПОМЕХИ | 2009 |
|
RU2487367C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ СУДНА ОТНОСИТЕЛЬНО ДНА | 1992 |
|
RU2042152C1 |
| СПОСОБ И УСТРОЙСТВО ПЕРЕДАЧИ ДИСКРЕТНОЙ ИНФОРМАЦИИ ДЛЯ БЫСТРОДВИЖУЩИХСЯ ОБЪЕКТОВ | 2017 |
|
RU2658649C1 |
| СПОСОБ И УСТРОЙСТВО ПРОГНОЗИРОВАНИЯ НЕСТАЦИОНАРНОГО ВРЕМЕННОГО РЯДА | 2009 |
|
RU2467383C2 |
| УСТРОЙСТВО ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С КОМПЕНСАЦИЕЙ ЧМ ДОПЛЕРОВСКИХ СИГНАЛОВ | 2017 |
|
RU2657462C1 |
| Способ определения параметров цели гидролокатором | 2017 |
|
RU2650835C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ В ГИДРОЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2357269C2 |
| Способ обработки сигналов с гиперболической частотной модуляцией | 2018 |
|
RU2711420C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛЕЙ ОТ СЛУЧАЙНЫХ РЕВЕРБЕРАЦИОННЫХ ПОМЕХ | 2008 |
|
RU2365938C1 |

Способ корреляционной обработки сигналов, отраженных от быстродвижущихся целей, относится к области специальной радиотехники и предназначен для использования в системах обнаружения и слежения за движущимися объектами. Известно, что движение объекта приводит к доплеровской дисперсии, затрудняющей его обнаружение, вследствие уменьшения отношения сигнал/помеха на выходе системы. Сущность изобретения заключается в том, что предлагается преобразовать излучаемые сигналы по закону s(t)→s(arctg(t)} в области времени. Установлено, что подобные сигналы являются инвариантными относительно ускорения цели, а скорость приводит лишь к частотному сдвигу сигнала без его искажения. Для корреляционной обработки принятого сигнала эхосигнал возвращают в исходный линейный масштаб, выполняя операцию интерполяции отсчетов принятого сигнала по закону s(arctg(t))→s(t) в реальном масштабе времени. В результате отклик системы, реализующей данный способ обработки, оказывается устойчивым при обнаружении и слежении за целями, движущимися с большими скоростями, что и является достигаемым техническим результатом. 1 ил.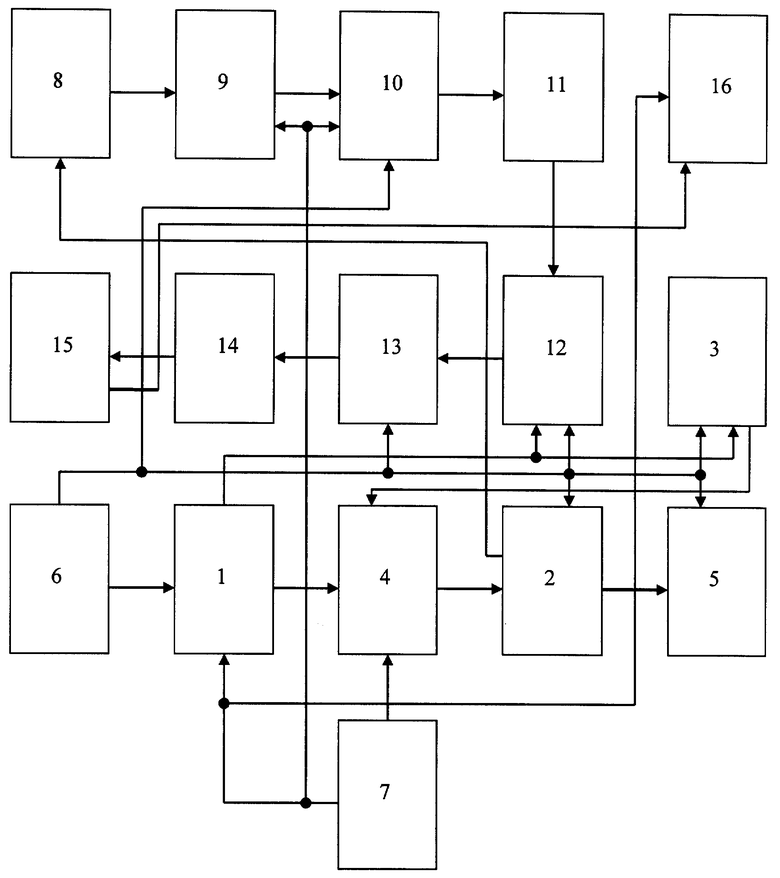
Способ обнаружения быстродвижущихся целей, заключающийся в том, что излучают зондирующий сигнал s(t), где t - текущее время, принимают в виде отсчетов отраженный от цели сигнал в реальном масштабе времени, перемножают принятый сигнал с копией излученного сигнала, осуществляют преобразование Фурье результата перемножения, формируя взаимно корреляционную функцию, находят квадрат модуля преобразованного сигнала, сравнивают полученный сигнал с порогом, при превышении которого принимают решение об обнаружении цели, отличающийся тем, что перед излучением формируют зондирующий сигнал по закону s(arctg(t), при приеме отраженного от цели сигнала осуществляют интерполяцию отсчетов принятого сигнала по закону  выполняемую в пределах временного интервала между двумя соседними отсчетами.
выполняемую в пределах временного интервала между двумя соседними отсчетами.
| US 3938147, 10.02.1976 | |||
| СПОСОБ И СИСТЕМА ДЛЯ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТЕЙ И КООРДИНАТ ОБЪЕКТОВ (ВАРИАНТЫ) | 2003 |
|
RU2255352C2 |
| ЦИФРОВАЯ СИСТЕМА СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1995 |
|
RU2087006C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ СИГНАЛОВ | 2000 |
|
RU2195014C2 |
| US 6362775 B1, 26.03.2002 | |||
| ПНЕВМАТИЧЕСКИЙ ВЫСЕВАЮЩИЙ АППАРАТ | 1994 |
|
RU2081545C1 |

