Изобретение относится к области радиолокации, а именно к способам распознавания разрешаемых воздушных целей по траекторным отличительным признакам при радиолокационном наблюдении.
Известны способы распознавания целей по траекторным отличительным признакам, основанные на сопоставлении измеренных значений высоты и скорости полета целей /1/ с интервалами нахождения соответствующих отличительных признаков. Недостатками известных способов является низкая вероятность правильного распознавания при высоком уровне вероятности ложного распознавания из-за использования маленького рабочего словаря отличительных признаков существенно меньшего, чем используемый априорный алфавит классов целей.
Задачей изобретения является повышение вероятности правильного распознавания воздушных целей по результатам измерения их координат и радиальной составляющей скорости с использованием дискретного радиолокационного обзора пространства.
Поставленная задача решается тем, что при получении первой отметки от цели фиксируют момент ее получения t1, производят измерение ее координат - дальности D1, угла места ϕ1 , пеленга β1 , радиальной составляющей ее скорости  и высоты полета цели H1. Далее производят сопоставление координат цели D1, H1 и β1 с интервалами нахождения координат искомого класса цели соответствующих участку траектории, на котором находится цель, и формируют границы интервалов для других оцениваемых параметров.
и высоты полета цели H1. Далее производят сопоставление координат цели D1, H1 и β1 с интервалами нахождения координат искомого класса цели соответствующих участку траектории, на котором находится цель, и формируют границы интервалов для других оцениваемых параметров.
После получения второй отметки от цели также фиксируют момент ее поступления t2, измеряют ее координаты, радиальную скорость. Далее формируют на выходе блока траекторных расчетов устройства вторичной обработки (УВО) информации /3/ сигналы скорости изменения координат с использованием соотношений:
и сигнал ускорения измерения дальности:
а также формируют сигнал радиальной составляющей скорости  по значениям сигналов, полученных в результате измерения дальности до цели с использованием выражения (1) и методом непосредственного измерения радиальной составляющей скорости цели
по значениям сигналов, полученных в результате измерения дальности до цели с использованием выражения (1) и методом непосредственного измерения радиальной составляющей скорости цели  в УВО с использованием весовых коэффициентов, учитывающих точность выполняемых измерений /3/. Далее, как и на предыдущем шаге по значениям D2, H2 и β2 определяют границы интервалов нахождения остальных траекторных параметров, соответствующих участку траектории полета цели, который определяется по значению ее координат.
в УВО с использованием весовых коэффициентов, учитывающих точность выполняемых измерений /3/. Далее, как и на предыдущем шаге по значениям D2, H2 и β2 определяют границы интервалов нахождения остальных траекторных параметров, соответствующих участку траектории полета цели, который определяется по значению ее координат.
После получения третьей отметки от цели также фиксируют момент времени ее поступления, измеряют ее координаты и радиальную составляющую скорости. Далее формируют на выходе блока тракторных расчетов УВО сигналы скорости.
и ускорения изменения координат цели
После этого из сигналов  , полученных методом непосредственного измерения радиальной составляющей скорости и измерения дальности
, полученных методом непосредственного измерения радиальной составляющей скорости и измерения дальности  в УВО формируют сигнал ускорения изменения дальности
в УВО формируют сигнал ускорения изменения дальности  с использованием весовых коэффициентов, учитывающих точность выполняемых вычислений /2, 3/. Далее аналогично предыдущим шагам по значению координат цели D3, H3 и β3/ определяют область пространства, соответствующую одному из участков траектории полета цели искомого класса и определяют границы интервалов нахождения остальных траекторных отличительных признаков для данного участка траектории. При одновременном попадании всех параметров движения цели в соответствующие им интервалы принимают решение об обнаружении цели искомого класса.
с использованием весовых коэффициентов, учитывающих точность выполняемых вычислений /2, 3/. Далее аналогично предыдущим шагам по значению координат цели D3, H3 и β3/ определяют область пространства, соответствующую одному из участков траектории полета цели искомого класса и определяют границы интервалов нахождения остальных траекторных отличительных признаков для данного участка траектории. При одновременном попадании всех параметров движения цели в соответствующие им интервалы принимают решение об обнаружении цели искомого класса.
Таким образом, повышение качества распознавания осуществляют за счет увеличения используемого рабочего словаря отличительных признаков при постоянной величине априорного алфавита классов целей и разбиения областей нахождения отличительных признаков на конечное число участков, соответствующих характерным участкам траектории полета цели.
С использованием вышеизложенного способа возможно решение задачи распознавания одного класса воздушных целей (ВЦ) в присутствии остальных при условии, что их траектория полета может быть разбита на конечное число участков, для каждого из которых могут быть определены интервалы нахождения отличительных признаков (координат целей, их первых и вторых производных). Подобная априорная информация может быть получена при помощи натурального эксперимента либо с применением моделирования.
Так, например, пусть траекторию полета ВЦ можно разделить на три участка: набор высоты, разворот в вертикальной плоскости, пикирование /5/. При этом области пространства, в которых может находиться цель на каждом из участков, выглядят как представлено на чертеже. Границы областей нахождения отличительных признаков для данного класса ВЦ составляют:
- на участке набора высоты:
D - 10-130 км, H - 0,1-30 км, - -225--1200 м/с,
- -225--1200 м/с,  - 0-3o/с,
- 0-3o/с, - -110-104 м/с2,
- -110-104 м/с2,  - -0,01-0,25o/с2;
- -0,01-0,25o/с2;
- на участке разворота цели:
D - 4-100 км, H - 5-40 км, - -1100-215 м/с,
- -1100-215 м/с,  - 0-3o/с,
- 0-3o/с, - -30-0 м/с2,
- -30-0 м/с2,  - -0,7-0,01o/с2;
- -0,7-0,01o/с2;
- на участке пикирования:
D - 0-40 км, H - 0-25 км, - -1100--250 м/с,
- -1100--250 м/с,  - 0o/с,
- 0o/с, - -10-40 м/с2,
- -10-40 м/с2,  - 0o/с2.
- 0o/с2.
В этом случае:
- область 1 - соответствует только участку набора высоты;
- область 2 - соответствует только участку разворота цели;
- область 3 - соответствует только участку пикирования;
- область A - соответствует всем трем участкам;
- область B - соответствует участку набора высоты или разворота цели;
- область C - соответствует участку разворота или пикирования;
- область D - соответствует участку набора высоты или пикирования.
С учетом такого разбиения на области нахождения координат производится определение интервалов нахождения параметров движения цели, по попаданию в которые и производится распознавание цели.
Данный способ может быть реализован в устройстве вторичной обработки информации радиолокационной станции /3/, реализующей алгоритм распознавания.
Для приведенного выше варианта по результатам имитационного моделирования с использованием предложенного способа получены следующие значения показателей качества распознавания цели:
- вероятность правильного распознавания цели (P11) - 0,95 - 0,97 (для различных участков траектории);
- вероятность нераспознавания (P12) - 0,03 - 0,05;
- вероятность ложного распознавания (P21) - 0,002 - 0,27);
- вероятность правильного нераспознавания (P22) - 0,73 - 0,998.
Для способа-прототипа аналогичные значения составят:
P11=0,48-0,63;
P12=0,37-0,52;
P21=0,47-0,83;
P22=0,17-0,53.
Таким образом, с использованием предложенного способа достигается существенный выигрыш в качестве распознавания класса воздушной цели.
Список использованных источников:
1. Селекция и распознавание на основе локационной информации. /Под ред. А.Л.Горелика. - М.: Радио и связь, 1990.
2. А. Л. Горелик, В. А. Скрипкин. Методы распознавания. - М.: Высшая школа, 1984.
3. Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации. - М.: Радио и связь, 1986.
4. Фомин Я.А., Савич А.В. Оптимизация распознающих систем. - М.: Машиностроение, 1993.
5. Жаков А.М., Пигулевский Ф.А. Управление баллистическими ракетами. - М.: Воениздат, 1965.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ЧИСЛА РАЗРЕШАЕМЫХ ВОЗДУШНЫХ ЦЕЛЕЙ В ГРУППЕ | 1999 |
|
RU2158005C1 |
| СПОСОБ КОРРЕЛЯЦИОННОЙ ОБРАБОТКИ СИГНАЛОВ, ОТРАЖЕННЫХ ОТ БЫСТРОДВИЖУЩИХСЯ ЦЕЛЕЙ | 2005 |
|
RU2293997C1 |
| ГЕНЕРАТОР, ИМИТИРУЮЩИЙ ПОМЕХОВЫЕ СИГНАЛЫ ОТ ДИПОЛЬНЫХ ОТРАЖАТЕЛЕЙ | 2006 |
|
RU2310883C1 |
| Способ сопровождения крылатой ракеты при огибании рельефа местности в различных тактических ситуациях | 2021 |
|
RU2760951C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ НИЗКОЛЕТЯЩИХ ЦЕЛЕЙ ПО ДАННЫМ ОТ АВТОНОМНЫХ РАДИОЛОКАТОРОВ | 2003 |
|
RU2241240C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ МАНЕВРИРУЮЩЕЙ ВОЗДУШНОЙ ЦЕЛИ | 1993 |
|
RU2048684C1 |
| ГЕНЕРАТОР ФЛЮКТУИРУЮЩИХ СИГНАЛОВ ЦЕЛЕЙ | 2002 |
|
RU2253129C2 |
| СПОСОБ СКРЫТИЯ МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2006 |
|
RU2312297C1 |
| Способ сопровождения траектории цели в активно-пассивной радиолокационной системе | 2021 |
|
RU2769566C2 |
| СПОСОБ РАСПОЗНАВАНИЯ БАЛЛИСТИЧЕСКИХ ЦЕЛЕЙ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ТОЧЕК ИХ ПУСКА И ПАДЕНИЯ ДЛЯ ОБЗОРНЫХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 2016 |
|
RU2612029C1 |
Изобретение относится к области радиолокации, а именно к способам распознавания разрешаемых целей по траекторным отличительным признакам. Технический результат заключается в повышении вероятности правильного распознавания заданного класса целей в условиях ограничения времени решения задачи распознавания. Способ основан на использовании большего числа отличительных признаков: трех координат и их первых и вторых производных по времени для решения задачи распознавания по результатам трех последовательно полученных отметок от цели и на разбиении областей нахождения отличительных признаков на конечное число участков соответствующих характерным участкам траектории полета цели искомого класса. При одновременном попадании полученных в результате обзоров параметров движения цели в априорно известные интервалы, соответствующие одному из участков траектории полета цели искомого класса, принимается решение об обнаружении цели этого класса. 1 ил.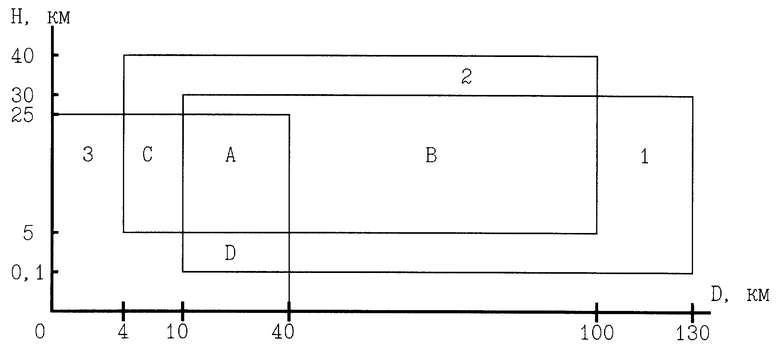
Способ распознавания класса воздушной цели, основанный на дискретном радиолокационном измерении координат цели, определении параметров ее движения и сравнении измеренных значений с интервалами нахождения априорно известных одноименных параметров искомого класса целей, отличающийся тем, что всю траекторию полета цели искомого класса разбивают на конечное число характерных участков с априорно известными соответствующими им интервалами нахождения траекторных отличительных признаков и после поступления первой отметки от цели фиксируют момент ее поступления, измеряют ее координаты: дальность, угол места, пеленг, высоту полета и значение радиальной составляющей скорости и по значению координат цели определяют возможные участки траектории, на которых может находиться цель с соответствующими им границами интервалов нахождения траекторных отличительных признаков, после поступления второй отметки от цели выполняют аналогичные действия и формируют на выходе блока траекторных расчетов устройства вторичной обработки информации радиолокационной станции (УВО) значения сигналов скоростей изменения дальности, угла места и пеленга цели, после поступления третьей отметки от цели также фиксируют момент ее поступления, измеряют значения координат цели и радиальной составляющей скорости ее полета, формируют на выходе блока траекторных расчетов УВО значения сигналов скоростей и ускорений изменения дальности, угла места и пеленга, по значениям координат цели определяют участки траектории полета, на которых может находиться цель с соответствующими им границами интервалов нахождения траекторных отличительных признаков и, при выполнении условия одновременного попадания значений сигналов скоростей и ускорений изменения координат в одноименные интервалы, принимают решение о принадлежности воздушной цели к искомому классу.
| ГОРЕЛИК А.М | |||
| и др | |||
| Методы распознавания | |||
| - М.: Высшая школа, 1984 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЛИЧЕСТВА РАЗРЕШАЕМЫХ ВОЗДУШНЫХ ЦЕЛЕЙ В ГРУППЕ | 1993 |
|
RU2080617C1 |
| US 4649394 A, 10.03.1987 | |||
| ШИШОВ Ю.А | |||
| и др | |||
| Многоканальная радиолокация с временным разделением каналов | |||
| - М.: Радио и связь, 1987, с | |||
| Способ получения борнеола из пихтового или т.п. масел | 1921 |
|
SU114A1 |
| КУЗЬМИН С.З | |||
| Основы проектирования систем цифровой обработки радиолокационной информации | |||
| - М.: Радио и связь, 1986, с | |||
| Приспособление для останова мюля Dobson аnd Barlow при отработке съема | 1919 |
|
SU108A1 |
