Изобретение относится к гидроакустическим навигационным системам и может быть использовано для навигационного обеспечения подводных аппаратов.
Известна гидроакустическая синхронная дальномерная навигационная система [1] , состоящая из базы гидроакустических приемников, служащих для измерения времени распространения акустических сигналов от объекта навигации до маяков, устройства вычисления дистанции по измеренному времени распространения и известной скорости звука и устройства вычисления координат объекта навигации по найденным значениям дистанции.
Недостатком такой системы является большая погрешность определения координат, связанная с изменчивостью скорости звука в морской воде.
Известна также гидроакустическая синхронная дальномерная навигационная система [2] , содержащая навигационную донную базу из М гидроакустических приемоответчиков с различными частотами ответа fm(m=1-M), размещенный на объекте навигации гидроакустический передатчик с частотой опроса fо, вход которого соединен с первым выходом генератора синхроимпульсов, М-канальный приемник с акустическим входом для ответных сигналов, выходы которого подключены к входам М измерителей времени распространения гидроакустических сигналов до соответствующего приемоответчика, работающего на частоте этого канала и обратно, вторые входы которых соединены со вторыми выходами генератора синхроимпульсов, M•N блоков преобразования временных интервалов в дистанции по числу N возможных лучевых траекторий, входы которых подключены к соответствующим выходам измерителей времени распространения, М блоков выбора максимального значения, входы которых соединены с выходами N блоков каждого из М каналов преобразования временных интервалов в дистанции, вычислитель координат объекта навигации, вход которого соединен с выходами М блоков выбора максимального значения.
Наличие в структуре навигационной системы блоков преобразования временных интервалов в дистанции, работающих с учетом лучевой структуры звукового поля, позволяет снизить погрешность определения координат.
Известная навигационная система по своей технической сущности, функциональному назначению и достигаемому техническому результату является наиболее близкой к заявляемому изобретению.
Недостатком известной навигационной системы является большая погрешность определения дистанции и координат соответственно при работе в мелком море, когда временные задержки между отдельными лучами уменьшаются, а сами лучи невозможно идентифицировать и выделить отдельно.
В основу изобретения положена задача уменьшения погрешности измерения координат при работе гидроакустической синхронной дальномерной навигационной системы в мелком море в условиях развитой многолучивости.
Поставленная задача решается тем, что в гидроакустическую синхронную дальномерную навигационную систему, содержащую донную навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа fm (m= 1-M), размещенные на объекте навигации гидроакустический передатчик с частотой опроса fо, вход которого соединен с первым выходом генератора синхроимпульсов, М-канальный приемник с акустическим входом для ответных сигналов, выходы которого подключены к первым входам М измерителей времени распространения гидроакустических сигналов от объекта навигации до приемоответчика, работающего на частоте этого канала и обратно, вторые входы которых соединены со вторым выходом генератора синхроимпульсов, M•N блоков преобразования временных интервалов в дистанции по числу N лучевых траекторий, входы которых соединены с выходами соответствующих измерителей времени распространения, и вычислитель координат объекта навигации, введены размещенные на гидроакустических приемоответчиках М идентичных вертикально ориентированных приемных антенн, каждая из которых состоит из М пар противофазно возбуждаемых групп по 2N+1 гидрофонов, расстояние между которыми равно половине длины волны на частоте опроса fо, а размещенные на гидроакустических приемоответчиках акустические передатчики выполнены N частотными с частотами ответа fmn, равномерно распределенными в рабочем интервале частот f11-fMN, на объекте навигации размещена вертикально ориентированная приемная антенна, состоящая из М пар противофазно возбуждаемых групп по 2N+1 гидрофонов, расстояние между которыми равно половине длины волны на верхней частоте fMN рабочего диапазона частот, М канальный приемник с общим акустическим входом для приема ответных сигналов выполнен M•N-канальным по числу M•N рабочих частот ответа fmn, М - канальный измеритель времени распространения акустических сигналов от объекта навигации до приемоответчика, работающего на частоте этого канала и обратно, выполнен M•N-канальным, входы которого соединены с соответствующими выходами приемника, а выходы соединены с соответствующими входами M•N блоков преобразования временных интервалов в дистанции, введены М измерителей расстояния от объекта навигации до каждого из гидроакустических приемоответчиков, вход каждого измерителя расстояний соединен с N выходами, соответствующими различным лучам, из M•N выходов блока преобразования временных интервалов в дистанции, а выходы измерителей расстояний соединены с входом вычислителя координат.
В отличие от прототипа в заявленной гидроакустической синхронной дальномерной навигационной системе прием акустических сигналов производится вертикально ориентированными направленными антеннами. Характеристика направленности приемной антенны, установленной на каждом гидроакустическом приемоответчике, содержит на частоте опроса fо два лепестка, симметрично расположенные относительно горизонтального направления, которым соответствуют углы скольжения α0= ±arcsin 1/2N, ширина каждого лепестка на уровне 0,7 от максимального определения выражением 2Δα0 = 60/M•N, т.е. определяется полной длиной приемной вертикальной антенной, выраженной в длинах волн.
Характеристика направленности приемной антенны, установленной на объекте навигации, содержит два лепестка, симметрично расположенные относительно горизонтального направления, которым соответствуют углы скольжения 
a ширина каждого лепестка на уровне 0,7 от максимального оценивается аналогичным выражением 
Поскольку каждый приемоответчик излучает ответный сигнал, содержащий N спектральных составляющих fmn, n= 1-N, а каждой спектральной составляющей соответствует свой угол скольжения, то ответный сигнал, излученный каждым приемоответчиком, принимается вдоль N углов скольжения αmn, n=1-N, которым соответствуют (N)m лучевых траекторий.
Таким образом, частотному разделению ответных сигналов соответствует угловое разделение лучевых траекторий и селективный прием отдельных лучей направленной приемной антенной. В свою очередь угловая селекция лучевых траекторий позволяет уменьшить погрешность определения расстояний в мелком море. Сами расстояния определяются следующим образом.
По измеренному времени распространения to,mn акустического сигнала от объекта навигации до гидроакустического приемоответчика и обратно и известным углам приема α0,αmn определяются в первом приближении время распространения акустического сигнала с частотой опроса fo от объекта навигации до приемоответчика t(1) o и время распространения акустического сигнала от приемоответчика, излучающего ответный сигнал с частотой fmn, до объекта навигации t(1) mn
По найденным временам t(1) m, t(1) o, известному профилю скорости звука C(z) на акватории мелкого моря и горизонтам излучения-приема Zо, Zm, соответствующим объекту навигации и гидроакустическому приемоответчику, в блоке преобразования временных интервалов в дистанции определяются горизонтальные расстояния r(1) o,mn и r(1) mn,o, соответствующие первому приближению к искомому расстоянию, и уточненные значения углов скольжения на горизонтах получения-приема α
По найденным временам t(2) mn, известному профилю скорости звука C(z) и горизонтам излучения-приема zo, zm определяются в блоке преобразования временных интервалов в дистанции горизонтальные расстояния r(2) o,mn, r(2) mn,o и углы скольжения α
Найденные значения расстояний rmn поступают в блок измерителей расстояний от объекта навигации до каждого приемоответчика, где они усредняются по всем N лучевым траекториям, а искомое расстояние rm определяется алгоритмом усреднения
в которой роль весовых коэффициентов играют коэффициенты правдоподобия an. По набору расстояний rm определяются координаты объекта навигации.
Таким образом, заявленная гидроакустическая синхронная дальномерная навигационная система в новой совокупности существенных признаков является новой, обладает изобретательским уровнем, т.е. она явным образом не следует из уровня техники и по своим характеристикам превосходит известные навигационные системы. Совокупность существенных признаков заявленного изобретения имеет причинно-следственную связь с достигаемым техническим результатом.
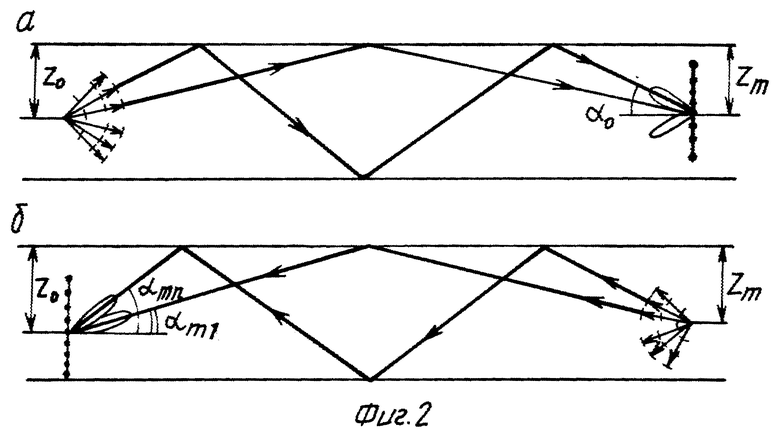
Изобретение поясняется чертежами, где на фиг. 1 приведена блок-схема гидроакустической синхронной дальномерной навигационной системы; на фиг. 2 - лучевые схемы распространения акустических сигналов опроса и ответа в мелком море: а) излучение и прием сигнала опроса на частоте fo, б) излучение и прием ответного сигнала на частотах fmn.
На чертежах приняты следующие обозначения:
1m - приемоответчик m-го канала, m=1-М;
2 - передатчик акустических импульсов опроса частотой fо;
3mn - M•N-канальный приемник ответных акустических сигналов;
4mn - M•N-канальный измеритель времени распространения акустических сигналов в mn-ном канале;
5mn - M•N-канальный блок преобразования временных интервалов в дистанции в mn-ном канале;
6m - измеритель расстояний между объектом навигации и m-м приемоответчиком;
7 - вычислитель координат объекта навигации;
8 - генератор синхроимпульсов;
9 - вертикальная приемная антенна на объекте навигации;
10m - вертикальная приемная антенна на m-м приемоответчике.
Гидроакустическая синхронная дальномерная навигационная система работает следующим образом.
В момент запуска передатчик 2 излучает акустический сигнал запроса на частоте fo, который, распространяясь в водной среде, принимается приемоответчиком 1m. Все акустические сигналы распространяются в мелкoe море под углами скольжения, не превышающими некоторого критического значения, но направленная приемная антенна приемоответчика 10m принимает только те сигналы, которые распространяются под углами скольжения, близкими к α0. Каждый из приемоответчиков 1m излучает в момент прихода на него сигнала запроса N-частотный сигнал ответа, содержащий набор частот fmn, n=1-N. Сигналы, излученные приемоответчиками 1m, распространяясь в водной среде, принимаются направленной приемной антенной 9, расположенной на объекте навигации, но из всех возможных лучей принимаются только те, для которых углы скольжения близки к αmn, n = 1-N. M•N - канальный приемник 3mn принимает все акустические сигналы с частотами fmn, каждой из которых соответствует луч с углом скольжения αmn. Усиленные в приемнике сигналы с выхода каждого из каналов поступают на запирающий вход соответствующих измерителей 4mn времени и запирают его своим фронтом от импульсов - меток времени генератора 8 синхроимпульсов. Информация о полученном числе меток времени, характеризующем время распространения акустического сигнала от объекта навигации до m-го приемоответчика и обратно, поступает на вход M•N блоков 5mn преобразования временных интервалов в дистанции. В каждом блоке 5mn по измеренному времени распространения определяются дистанция и угол скольжения, соответствующие конкретной траектории. Вычисленные значения дистанций и углов скольжения α
Вычисленные значения дистанций rm поступают в вычислитель 7 координат объекта навигации.
Таким образом, в заявляемой гидроакустической синхронной дальномерной навигационной системе высокая точность определения координат обеспечивается и в мелком море за счет использования направленных приемных антенн, позволяющих выделить вклад отдельных лучей.
Источники информации
1. Милн П.Х. Гидроакустические системы позиционирования.- Л.: Судостроение, 1989, c.49-60.
2. Патент РФ N 713278, кл. G 01 S 9/66, 1993 г.- прототип.
Изобретение относится к гидроакустическим навигационным системам и может быть использовано для навигационного обеспечения подводных аппаратов. Гидроакустическая синхронная дальномерная навигационная система содержит донную навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа fm(m=1-М), размещенный на объекте навигации гидроакустический передатчик с частотой опроса fo, вход которого соединен с первым выходом генератора синхроимпульсов, М-канальный приемник с акустическим входом для ответных сигналов, выполненный М•N-канальным по числу М•N рабочих частот ответа fmn, М измерителей времени распространения гидроакустических сигналов от объекта навигации до приемоответчика, работающего на частоте этого канала и обратно, выполненный М•N-канальным, М•N блоков преобразования временных интервалов в дистанции по числу N лучевых траекторий, входы которых соединены с выходами соответствующих измерителей времени распространения, и вычислитель координат объекта навигации, на гидроакустических приемоответчиках размещены М идентичных вертикально ориентированных приемных антенн, каждая из которых состоит из М пар противофазно возбуждаемых групп по 2N+1 гидрофонов, расстояние между которыми равно половине длины волны на частоте опроса fo. Размещенные на гидроакустических приемоответчиках акустические передатчики выполнены N-частотными с частотами ответа fmn. На объекте навигации размещена вертикально ориентированная приемная антенна, состоящая из М пар противофазно возбуждаемых групп по 2N-1 гидрофонов, расстояние между которыми равно половине длине волны на верхней частоте fmn рабочего диапазона частот. Технический результат заключается в уменьшении погрешности измерения координат. 2 ил.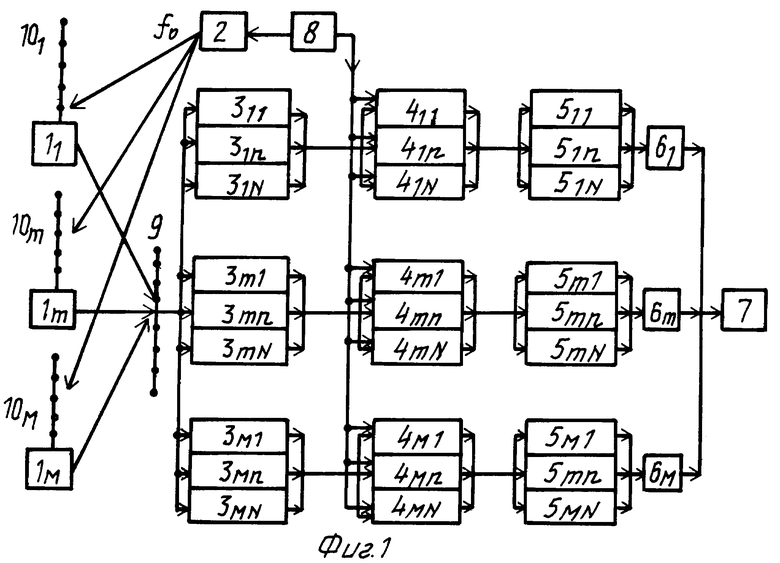
Гидроакустическая синхронная дальномерная навигационная система для мелкого моря, содержащая донную навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа fm(m=1-M), размещенные на объекте навигации гидроакустический передатчик с частотой опроса fo, вход которого соединен с первым выходом генератора синхроимпульсов, М-канальный приемник с акустическим входом для ответных сигналов, выходы которого подключены к первым входам М измерителей времени распространения гидроакустических сигналов от объекта навигации до приемоответчика, работающего на частоте этого канала, и обратно, вторые входы которых соединены с вторым выходом генератора синхроимпульсов, M • N блоков преобразования временных интервалов в дистанции по числу N лучевых траекторий, входы которых соединены с выходами соответствующих измерителей времени распространения, и вычислитель координат объекта навигации, отличающаяся тем, что в нее введены размещенные на гидроакустических приемоответчиках М идентичных вертикально ориентированных приемных антенн, каждая из которых состоит из М пар противофазно возбуждаемых групп по 2N+1 гидрофонов, расстояние между которыми равно половине длины волны на частоте опроса fo, а размещенные на гидроакустических приемоответчиках акустические передатчики выполнены N-частотными с частотами ответа fmn, равномерно распределенными в рабочем интервале
частот f11-fMN, размещенная на объекте навигации вертикально ориентированная приемная антенна, состоящая из М пар противофазно возбуждаемых групп по 2N+1 гидрофонов, расстояние между которыми равно половине длины волны на верхней частоте fMN рабочего диапазона частот, при этом М-канальный приемник с общим акустическим входом для приема ответных сигналов выполнен M • N-канальным по числу M • N рабочих частот ответа fmn, М-канальный измеритель времени распространения акустических сигналов от объекта навигации до приемоответчика, работающего на частоте этого канала, и обратно, выполнен M • N-канальным, его входы соединены с соответствующими выходами приемника, а выходы - с соответствующими M • N входами M • N блоков преобразования временных интервалов в дистанции, введены М измерителей расстояния от объекта навигации до каждого из гидроакустических приемоответчиков, вход каждого измерителя расстояния соединен с N выходами, соответствующими различным лучам, из M • N выходов блока преобразования временных интервалов в дистанции, а выходы измерителей расстояний соединены с входом вычислителя координат.
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1995 |
|
RU2084924C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДАЛЬНЕГО ДЕЙСТВИЯ | 1995 |
|
RU2084923C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1978 |
|
RU713278C |
| US 4972385 A, 20.11.1990 | |||
| КОМБИНИРОВАННЫЙ ТОПЛИВНЫЙ ФИЛЬТР | 2011 |
|
RU2478822C1 |
| МИЛН П.Х | |||
| Гидроакустические системы позиционирования | |||
| - Л.: Судостроение, 1989, с.49-60. | |||

