Изобретение относится к области гидроакустических навигационных систем и может быть использовано для навигационного обеспечения подводных аппаратов.
Известна гидроакустическая синхронная дальномерная навигационная система [1], содержащая донную базу из М гидроакустических приемоответчиков с различными частотами ответа, размещенные на объекте навигации гидроакустический передатчик, вход которого соединен с выходом синхронизатора, М-канальный приемник, выходы которого подключены к входам М измерителей времени распространения акустических сигналов до соответствующего приемоответчика, работающего на частоте этого канала, и обратно, вторые входы которых соединены с выходами синхронизатора, M×N блоков преобразования временных интервалов в дистанции по числу N возможных лучевых траекторий, входы которых подключены к соответствующим выходам измерителей времени распространения, М блоков выбора максимального значения, входы которых соединены с выходами N блоков каждого их М каналов преобразования временных интервалов в дистанции, вычислитель координат объекта навигации, вход которого соединен с выходом М блоков выбора максимального значения.
Наличие в структуре навигационной системы блоков преобразования временных интервалов в дистанции, работающих с учетом лучевой структуры звукового поля, позволяет уменьшить погрешность определения координат объекта навигации.
Недостатком указанной навигационной системы является большая погрешность определения координат в случае, если первый пришедший на приемник акустический сигнал не соответствует наикратчайшей лучевой траектории.
Известна гидроакустическая синхронная дальномерная навигационная система [2], содержащая донную базу из М гидроакустических приемоответчиков с различными частотами ответа fm (m=1-M), размещенные на объекте навигации гидроакустический передатчик с частотой опроса f0, вход которого соединен с первым выходом генератора синхроимпульсов, первый М-канальный приемник с акустическим входом для ответных сигналов, выходы которого подключены к входам М измерителей времени распространения акустических сигналов до соответствующего приемоответчика, работающего на частоте этого канала, и обратно, вторые входы которых соединены с выходами генератора синхроимпульсов, M×N блоков преобразования временных интервалов в дистанции по числу N возможных лучевых траекторий, входы которых соединены с первыми выходами соответствующих измерителей времени распространения, акустический приемник с акустическим входом для приема ответных сигналов, второй М-канальный приемник, входы которого соединены с выходами акустического приемника с акустическим входом, М вычислителей дистанции и угла скольжения, вторые входы которых соединены с вторыми выходами соответствующих измерителей времени распространения, блок задания инвариантной скорости, выход которого соединен с третьими входами вычислителей дистанции и угла скольжения, М блоков выбора луча, первые входы которых соединены с выходами соответствующих вычислителей дистанции и угла скольжения, вторые входы соединены с выходами соответствующих N блоков преобразования временных интервалов в дистанции, вычислитель координат объекта навигации.
В известной гидроакустической синхронной дальномерной навигационной системе определение искомой дистанции в каждом канале происходит в три этапа. На первом этапе в блоке преобразования временных интервалов в дистанции вычисляются для каждого канала М набор N дистанций, соответствующих различным лучевым траекториям. Критерий выбора максимальной дистанции из N возможных на этом этапе не применяется, поскольку измеренный временной отсчет может и не соответствовать наикратчайшей траектории.
На втором этапе с помощью шестиэлементного акустического приемника, элементы которого образуют три взаимно ортогональные пары, измеряются разности фаз Δϕx, Δϕy, Δϕz вдоль координатных осей X, Y, Z, образованных парами гидрофонов на каждой из ответных частот fm (m=1-M). Искомые дистанции в каждом канале определяются через измеренное время распространения tг и разность фаз в направлении на источник Δϕг по алгоритму, использующему инвариантную скорость, которая не зависит от вида лучевой траектории и определяется для неоднородной морской среды профилем скорости звука C(z) и алгоритмом средне-гармонического усреднения
r=ΔϕгtгC2 инв/ωl,
где ω - круговая частота, l - расстояние между приемными элементами в каждой паре, r - горизонтальное расстояние.
По измеренным в каждом канале разностям фаз определяется также угол скольжения, соответствующий принятому сигналу
α=arctg(Δϕz/Δϕг), Δϕг=(Δϕ2 x+Δϕ2 y)1/2
На третьем этапе горизонтальная дистанция и угол скольжения (r, α) сравниваются с вычисленными в блоке преобразования временных интервалов в дистанции величинами (r, α)n,m n=1-N для каждого луча, а истинной дистанцией rm считается та, которая удовлетворяет критерию минимума погрешности.
Такая гидроакустическая синхронная дальномерная навигационная система является наиболее близкой к заявленному изобретению.
Недостатком указанной гидроакустической синхронной дальномерной навигационной системы является большая погрешность определения координат объекта навигации, связанная с погрешностью определения составляющих градиента фазы Δϕг, Δϕz и, соответственно, опорных значений (r, α), a также за счет погрешности задания инвариантной скорости, связанной с пространственной изменчивостью профиля скорости C(z).
В основу изобретения положена задача уменьшения погрешности определения координат объекта навигации путем уменьшения составляющих, связанных с определением опорных значений горизонтальной дистанции и угла скольжения (r, α) и пространственной изменчивостью профиля скорости C(z).
Поставленная задача решается тем, что в гидроакустической синхронной навигационной системе, содержащей донную базу их М гидроакустических приемоответчиков с различными частотами ответа fm (m=1-M), размещенные на объекте навигации гидроакустический передатчик с частотой опроса f0, вход которого соединен с первым выходом генератора синхроимпульсов, первый М-канальный приемник с акустическим входом для ответных сигналов, выходы которого подключены к первым входам М измерителей времени распространения акустических сигналов до соответствующего приемоответчика, работающего на частоте этого канала, и обратно, вторые входы которых соединены с вторым выходом генератора синхроимпульсов, M×N блоков преобразования временных интервалов в дистанции по числу N лучевых траекторий, входы которых соединены с первыми выходами соответствующих измерителей времени распространения, акустический приемник с акустическим входом для приема ответных сигналов, второй М-канальный приемник, входы которого соединены с выходами акустического приемника с акустическим входом, М вычислителей дистанции и угла скольжения, вторые входы которых соединены с вторыми выходами соответствующих измерителей времени распространения, блок задания инвариантной скорости, выход которого соединен с третьими входами вычислителей дистанции и угла скольжения, М блоков выбора луча, первые входы которых соединены с выходами соответствующих вычислителей дистанции и угла скольжения, вторые входы - с выходами соответствующих N блоков преобразования временных интервалов в дистанции, вычислитель координат объекта навигации, в качестве акустического приемника с акустическим входом установлен комбинированный акустический приемник на основе трехкомпонентного приемника колебательной скорости и приемника звукового давления с совмещенным фазовым центром, второй выход приемника звукового давления соединен с акустическим входом первого М-канального приемника, каждый канал второго М-канального приемника выполнен из четырех субканалов (x, y, z, p) по числу компонент (x, y, z) приемника колебательной скорости и приемника звукового давления, первые выходы субканалов (x, y, z, p) второго М-канального приемника соединены с первыми входами М вычислителей дистанции и угла скольжения. В состав гидроакустической синхронной дальномерной навигационной системы дополнительно введены также размещенные на объекте навигации блок определения взаимных пеленгов, входы которых соединены с вторыми выходами субканалов (х, у) второго М-канального приемника, М блоков коррекции дистанций, первые входы которых соединены с выходами блока определения взаимных пеленгов, вторые входы - с выходами блоков выбора луча, а выходы соединены с входом вычислителя координат объекта навигации.
В заявленной гидроакустической синхронной дальномерной навигационной системе общими существенными признаками для нее и прототипа являются:
- донная навигационная база из М гидроакустических приемоответчиков с различными частотами ответа fm (m=1-M);
- размещенные на объекте навигации гидроакустический передатчик с частотой опроса f0, вход которого соединен с первым выходом генератора синхроимпульсов;
- первый М-канальный приемник с акустическим входом для ответных сигналов, выходы которого подключены к первым входам М измерителей времени распространения акустических сигналов до приемоответчика, работающего на частоте этого канала, и обратно, вторые входы которых соединены с вторым выходом генератора синхроимпульсов;
- M×N блоков преобразования временных интервалов в дистанции по числу N лучевых траекторий, входы которых соединены с первыми выходами соответствующих измерителей времени распространения;
- акустический приемник с акустическим входом для приема ответных сигналов;
- второй М-канальный приемник, входы которого соединены с выходами акустического приемника с акустическим входом;
- М вычислителей дистанции и угла скольжения, вторые входы которых соединены со вторыми выходами соответствующих измерителей времени распространения;
- блок задания инвариантной скорости, выход которого соединен с третьими входами вычислителей дистанции и угла скольжения;
- М блоков выбора луча, первые входы которых соединены с выходами соответствующих вычислителей дистанции и угла скольжения, вторые входы - с выходами соответствующих N блоков преобразования временных интервалов в дистанции;
- вычислитель координат объекта навигации.
Сопоставительный анализ существенных признаков заявленного устройства и прототипа показывает, что первый в отличие от прототипа, имеет следующие отличительные признаки:
- в качестве акустического приемника с акустическим входом установлен комбинированный акустический приемник на основе трехкомпонентного приемника колебательной скорости и приемника звукового давления с совмещенным фазовым центром;
- второй выход приемника звукового давления соединен с акустическим входом первого М-канального приемника;
- каждый канал второго М-канального приемника выполнен из четырех субканалов (x, y, z, p) по числу компонент (x, y, z) трехкомпонентного приемника колебательной скорости и приемника звукового давления (р);
- первые выходы субканалов (x, y, z, p) второго М-канального приемника соединены с первыми входами М вычислителей дистанции и угла скольжения;
- на объекте навигации дополнительно размещены блок определения взаимных пеленгов, входы которых соединены с вторыми выходами субканалов (х, у) второго М-канального приемника, М блоков коррекции дистанций, первые входы которых соединены с выходами блока определения взаимных пеленгов, вторые входы - с выходами блоков выбора луча, а выходы соединены с входом вычислителя координат объекта навигации.
В заявленной гидроакустической синхронной дальномерной навигационной системе опорные значения горизонтальной дистанции и угла скольжения (r, α) определяются через напряжения Uνx, Uνy, Uνz, Up на выходе второго М-канального приемника формулами

где Q=Uνг/Up, Uνг=(U2 νx+Uνy 2,)1/2, с0 - скорость звука в эталонной среде (воде), в которой выполнена калибровка приемника колебательной скорости, Синв - инвариантная скорость, определяемая через профиль скорости звука C(z) алгоритмом усреднения обратных скоростей
где Н - глубина моря в районе работы гидроакустической синхронной дальномерной навигационной системы.
Использование в заявленной гидроакустической синхронной дальномерной навигационной системе трехкомпонентного приемника колебательной скорости и приемника звукового давления с совмещенным фазовым центром для определения опорных значений (r, α) позволило уменьшить погрешность их определения в сравнении с прототипом. Это связано с тем, что для трехкомпонентного приемника колебательной скорости и приемника звукового давления хорошо известна процедура их поверки как измерительных средств, минимизирующая погрешность измерения величин колебательной скорости и звукового давления [3].
Для уменьшения погрешности определения дистанций rm, определенных в блоках выбора луча по критерию минимума погрешности, корректируются в блоке коррекции дистанций в соответствии с алгоритмом


Алгоритм (2) компенсирует неувязку в определении взаимных пеленгов, вычисленных либо с использованием сигнальной информации (Uvx, Uvy)pm на выходах каналов (x, y)pm второго М-канального приемника, либо с использованием информации на выходах М блоков выбора луча (r)pm и априори известной информации о расстояниях Lpm между элементами донной базы приемоответчиков. Эта коррекция также уменьшает погрешность определения дистанций в сравнении с прототипом, связанную с пространственной изменчивостью профиля скорости C(z).
Данная совокупность общих и отличительных существенных признаков обеспечивает получение технического результата, а именно уменьшение погрешности при определении координат объекта навигации.
На основе изложенного можно заключить, что совокупность существенных признаков заявленного изобретения имеет причинно-следственную связь с достигаемым техническим результатом, т.е. благодаря данной совокупности существенных признаков изобретения стало возможным решить поставленную задачу.
Следовательно, заявленное изобретение является новым, обладает изобретательским уровнем, т.е. оно явным образом не следует из уровня техники и пригодно для использования.
Заявленное изобретение поясняется чертежом, на котором приведена блок-схема гидроакустической синхронной дальномерной навигационной системы, где приняты следующие обозначения:
1m - приемоответчик m-го канала, m=1-М,
2 - передатчик акустических импульсов запроса на частоте f0,
3 - первый М-канальный приемник акустических сигналов,
4m - измеритель времени распространения акустических сигналов в m-м канале,
5m - блок выбора луча m-го канала,
6mn - блок преобразования временных интервалов в дистанции n=1-N,
7 - вычислитель координат объекта навигации,
8 - генератор синхроимпульсов,
9 - комбинированный акустический приемник на основе трехкомпонентного приемника колебательной скорости (9 x, y, z) и приемника звукового давления (9p) с совмещенным фазовым центром,
10 - второй М-канальный приемник,
11 - блок определения взаимных пеленгов,
12m - вычислитель дистанции и угла скольжения m-го канала,
13 - блок задания инвариантной скорости,
14m - блок коррекции дистанций m-го канала.
Гидроакустическая синхронная дальномерная навигационная система работает следующим образом.
Генератор 8 синхроимпульсов запускает передатчик 2 акустических сигналов и обнуляет М измерителей 4m времени распространения акустических сигналов до приемоответчика и обратно.
В момент запуска передатчик 2 акустических сигналов излучает акустический сигнал запроса на частоте f0, который, распространяясь в водной среде, принимается приемоответчиком lm. Каждый из приемоответчиков lm излучает в момент прихода на него сигнала запроса акустический сигнал ответа на частоте fm. Сигналы, излученные приемоответчиками lm, распространяясь в водной среде, принимаются комбинированным акустическим приемником 9, состоящим из трехкомпонентного приемника колебательной скорости и приемника звукового давления с совмещенным фазовым центром. Сигналы со второго выхода приемника 9р звукового давления комбинированного акустического приемника 9 усиливаются первым М-канальным приемником 3 акустических сигналов. Каждый из каналов первого М-канального приемника 3 акустических сигналов настроен на одну из частот fm (m=1-M) таким образом, что в каждом канале усиливается и детектируется сигнал ответа, излученный соответствующим ему приемоответчиком lm.
Усиленные в первом М-канальном приемнике 3 сигналы с выхода каждого из каналов поступают на запирающий вход соответствующих измерителей 4m времени и запирают его своим передним фронтом от импульсов-меток времени генератора 8 синхроимпульсов. Информация о накопленном числе меток времени, характеризующем время распространения акустического сигнала до m-го приемоответчика lm и обратно, поступает в соответствующие N блоков 6 преобразования временных интервалов в дистанции. В каждом из N блоков 6 преобразования временных интервалов в дистанции по измеренному времени распространения определяются дистанция и угол скольжения, соответствующие n-й лучевой траектории, причем различные лучевые траектории (лучи) отличаются числом отражений от поверхности и дна.
Кроме этого, ответные акустические сигналы поступают на трехкомпонентный приемник 9 x, y, z колебательной скорости комбинированного акустического приемника 9. С выхода трехкомпонентного приемника 9 x, y, z колебательной скорости и первого выхода приемника 9р звукового давления акустические сигналы поступают на вход второго М-канального приемника 10, каждый канал которого настроен на частоту соответствующего приемоответчика fm и содержит четыре субканала (x, y, z, p), соответствующих выходам трехкомпонентного приемника 9 x, y, z колебательной скорости и первому выходу приемника 9р звукового давления. С первых выходов субканалов (x, y, z, p) второго М-канального приемника 10 сигналы поступают на первые входы соответствующих вычислителей 12 дистанции и угла скольжения, на вторые их входы поступают сигналы с вторых выходов блоков 4 измерения временных интервалов, а на третьи входы - информация с выхода блока 13 задания инвариантной скорости. Вычисленные в блоках 12 по совокупной информации дистанции и углы скольжения поступают на первые входы блоков 5 выбора луча, на вторые входы которых поступает информация о вычисленных дистанциях rn с выхода блоков 6 преобразования временных интервалов в дистанции. Определенные по критерию минимума погрешности значения горизонтальных дистанций поступают далее на вторые входы блоков 14 коррекции дистанций.
В то же время сигналы с вторых выходов субканалов (х, y) второго М-канального приемника 10 поступают на вход блока 11 определения взаимных пеленгов, с выхода которого соответствующая информация поступает на первые входы блоков 14 коррекции дистанций. Скорректированные в соответствии с алгоритмом (2) дистанции поступают с выхода блоков 14 коррекции дистанций на вход вычислителя 7 координат объекта навигации
Таким образом, в заявленной гидроакустической синхронной дальномерной навигационной системе повышенная точность определения координат объекта навигации в сравнении с прототипом достигается использованием в ее составе комбинированного акустического приемника на основе трехкомпонентного приемника колебательной скорости и приемника звукового давления с совмещенным фазовым центром и алгоритмов, компенсирующих пространственную изменчивость профиля скорости звука.
Источники информации
1. Патент РФ №713278, МПК G01S 15/08, 1994 г.
2. Патент РФ №2084924, МПК G01S 15/08, 1997 г. - прототип.
3. В.А.Щуров. Векторная акустика океана. Владивосток, Дальнаука, 2003 г., с.48-54.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1995 |
|
RU2084924C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ МЕЛКОГО МОРЯ | 1999 |
|
RU2158431C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДАЛЬНЕГО ДЕЙСТВИЯ | 1995 |
|
RU2084923C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДАЛЬНЕГО ДЕЙСТВИЯ | 2007 |
|
RU2353949C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2468388C2 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДАЛЬНЕГО ДЕЙСТВИЯ | 2004 |
|
RU2289149C2 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1978 |
|
RU713278C |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2032187C1 |
Изобретение предназначено для навигационного обеспечения подводных аппаратов. Заявляемая система содержит донную навигационного базу из М гидроакустических приемоответчиков и размещенные на объекте навигации гидроакустический передатчик, генератор синхроимпульсов, первый М-канальный приемник, М измерителей времени распространения акустических сигналов до приемоответчика и обратно, M×N блоков преобразования временных интервалов в дистанции по числу N лучевых траекторий, комбинированный акустический приемник на основе трехкомпонентного приемника колебательной скорости и приемника звукового давления с совмещенным фазовым центром, второй М-канальный приемник, каждый канал которого выполнен из четырех субканалов, М вычислителей дистанции и угла скольжения, блок задания инвариантной скорости, М блоков выбора луча, N блоков преобразования временных интервалов в дистанции, вычислитель координат объекта навигации по критерию минимума погрешности, блок определения взаимных пеленгов, М блоков коррекции дистанций, соединенные определенным образом. Техническим результатом является уменьшение погрешности при определении координат объекта навигации. 1 ил.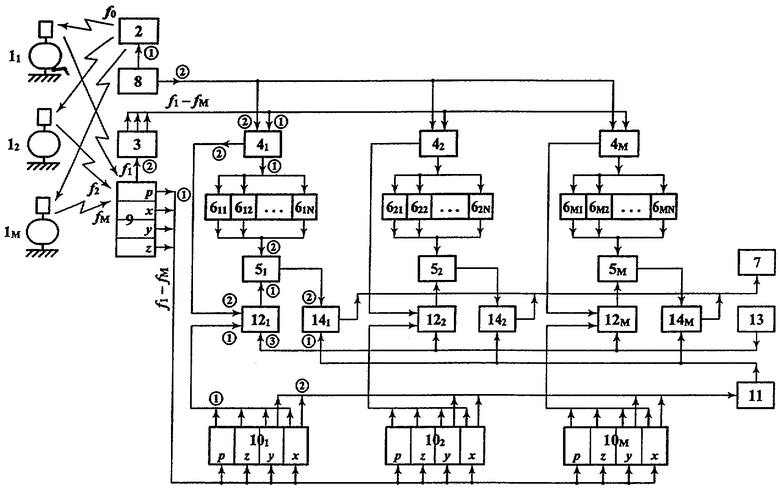
Гидроакустическая синхронная дальномерная навигационная система, содержащая донную навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа fm (m=l-M), размещенные на объекте навигации гидроакустический передатчик с частотой опроса f0, вход которого соединен с первым выходом генератора синхроимпульсов, первый М-канальный приемник с акустическим входом для ответных сигналов, выходы которого подключены к первым входам М измерителей времени распространения акустических сигналов до приемоответчика, работающего на частоте соответствующего канала М-канального приемника, и обратно, вторые входы М-измерителей времени распространения акустических сигналов соединены с вторым выходом генератора синхроимпульсов, M×N блоков преобразования временных интервалов в дистанции по числу N лучевых траекторий, входы которых соединены с первыми выходами соответствующих М-измерителей времени распространения акустических сигналов, акустический приемник с акустическим входом для приема ответных сигналов, второй М-канальный приемник, М вычислителей дистанции и угла скольжения, соответствующих различным лучевым траекториям, вторые входы которых соединены со вторыми выходами соответствующих измерителей времени распространения акустических сигналов, блок задания инвариантной скорости, выход которого соединен с третьими входами М-вычислителей дистанции и угла скольжения, М блоков выбора лучей соответствующего канала, первые входы которых соединены с выходами соответствующих М-вычислителей дистанции и угла скольжения, вторые входы - с выходами соответствующих N блоков преобразования временных интервалов в дистанции, вычислитель координат объекта навигации по критерию минимума погрешности, отличающаяся тем, что в качестве акустического приемника с акустическим входом для приема ответных сигналов установлен комбинированный акустический приемник на основе трехкомпонентного приемника колебательной скорости (x, y, z) и приемника звукового давления (р) с совмещенным фазовым центром, каждый канал второго М-канального приемника выполнен из четырех субканалов (x, y, z, p) по числу компонент (x, y, z) приемника колебательной скорости и (р) приемника звукового давления, при этом первые выходы трехкомпонентного приемника колебательной скорости (x, y, z) и приемника звукового давления (р) соединены с соответствующими первыми входами четырех субканалов (x, y, z, p) каждого канала второго М-канального приемника, второй выход приемника звукового давления комбинированного акустического приемника соединен с акустическим входом первого М-канального приемника, первые выходы субканалов (х, у, z, р) второго М-канального приемника соединены с первыми входами М вычислителей дистанции и угла скольжения, на объекте навигации дополнительно размещены блок определения взаимных пеленгов, входы которого соединены со вторыми выходами субканалов (х, у) второго М-канального приемника, М блоков коррекции дистанций, первые входы которых соединены с выходами блока определения взаимных пеленгов, вторые входы - с выходами блоков выбора луча, а выходы соединены с входом вычислителя координат объекта навигации по критерию минимума погрешности.
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1995 |
|
RU2084924C1 |
| КОМБИНИРОВАННЫЙ АКУСТИЧЕСКИЙ ПРИЕМНИК | 2002 |
|
RU2245604C2 |
| ТРЕХКОМПОНЕНТНЫЙ ПРИЕМНИК АКУСТИЧЕСКИХ КОЛЕБАНИЙ | 1998 |
|
RU2128850C1 |
| СПОСОБ АКУСТИЧЕСКОГО ЗОНДИРОВАНИЯ ОКЕАНА | 2002 |
|
RU2221261C1 |
| US 4924448, 08.05.1990 | |||
| US 2005162975 A1, 28.07.2005 | |||
| ЕР 1546758 А3, 29.06.2005. | |||

