Изобретение относится к нанотехнологическому оборудованию, а более конкретно к устройствам, обеспечивающим транспортировку и установку зондов и образцов в позиции измерения и функционального воздействия.
Известна сверхвысоковакуумная транспортная система для сканирующих зондовых микроскопов (СЗМ), содержащая линейный поворотный манипулятор, кассету для зондов и образцов и прецизионный манипулятор для установки зондов в позицию измерения. [1, 2]/
Недостатки указанного устройства заключаются в сложности и соответственно в низкой надежности устройства, связанной с расположением кассеты в зоне измерения, что приводит также к сложности адаптации и перенастраиваемости этой системы.
Известна также сверхвысоковакуумная транспортная система для сканирующих зондовых микроскопов, содержащая линейный поворотный манипулятор с магнитным захватом, состыкованный с загрузочной камерой, установочный линейный манипулятор качания, снабженный механическим захватом, карусельную кассету зондов и образцов с поворотным манипулятором, состыкованные с камерой хранения зондов и образцов и измерения, которая в свою очередь соединена с загрузочной камерой [3].
Указанное устройство выбрано в качестве прототипа предложенного изобретения.
Недостатки указанного устройства заключаются в ограниченных функциональных возможностях транспортной системы, связанной с использованием магнитного захвата, что в свою очередь накладывает ограничение на магнитные исследования, а также ограничивает выбор материалов держателя. Второй недостаток заключается в сложности конструкции, что определяется наличием как магнитного захвата, так и механического. Сложность конструкции приводит соответственно к снижению надежности всей системы и усложнению эксплуатации.
Задачей изобретения является создание многофункциональной сверхвысоковакуумной транспортной системы.
Технический результат изобретения заключается в расширении функциональных возможностей, упрощении конструкции и повышении надежности устройства.
Это достигается тем, что в сверхвысоковакуумную транспортную систему для сканирующих зондовых микроскопов, содержащую линейный поворотный манипулятор с захватом, состыкованный с загрузочной камерой, кассету для носителей зондов и образцов с манипулятором, установочный линейный манипулятор с захватом и измерительную камеру с финишным захватом зондов и образцов, введен второй линейный поворотный манипулятор с вилочным пружинным захватом, одна из осей которого выполнена профильной, захват первого линейного поворотного манипулятора выполнен цилиндрическим поворотным, со штырьками, кассета носителей зондов и образцов имеет этажерочное исполнение, манипулятор кассеты имеет дополнительное линейное перемещение, установочный линейный поворотный манипулятор имеет два дополнительных взаимоперпендикулярных перемещения в плоскости, перпендикулярной осевому перемещению, и вилочный пружинный захват с профильной осью, при этом второй линейный поворотный манипулятор пристыкован к загрузочной камере перпендикулярно первому линейному поворотному манипулятору, этажерочная кассета с манипулятором размещена в загрузочной камере в зоне пересечения двух линейных манипуляторов, установочный линейный поворотный манипулятор пристыкован к измерительной камере, соединенной с загрузочной камерой с возможностью взаимодействия с первым линейным манипулятором.
На фиг. 1 изображена транспортная система.
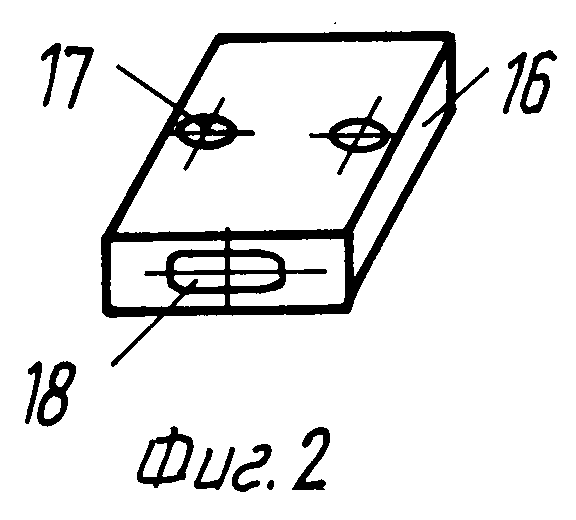
На фиг. 2 - носитель зондов.
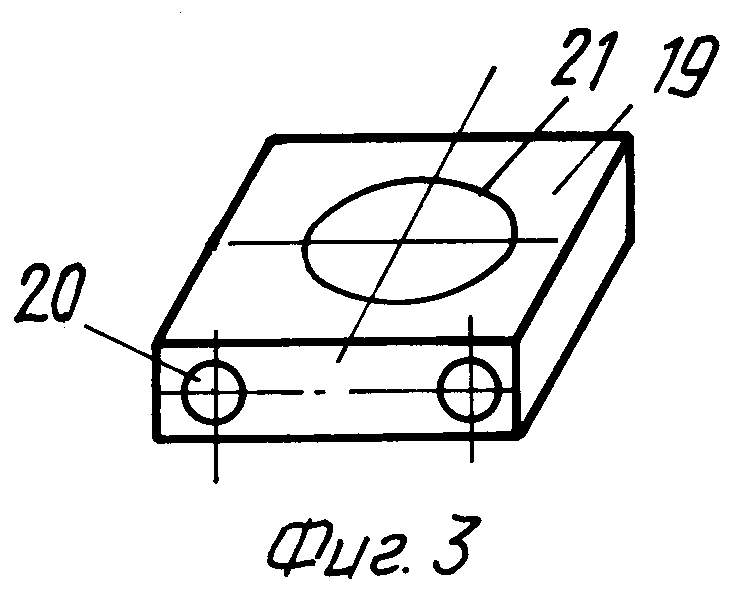
На фиг. 3 - носитель образцов.
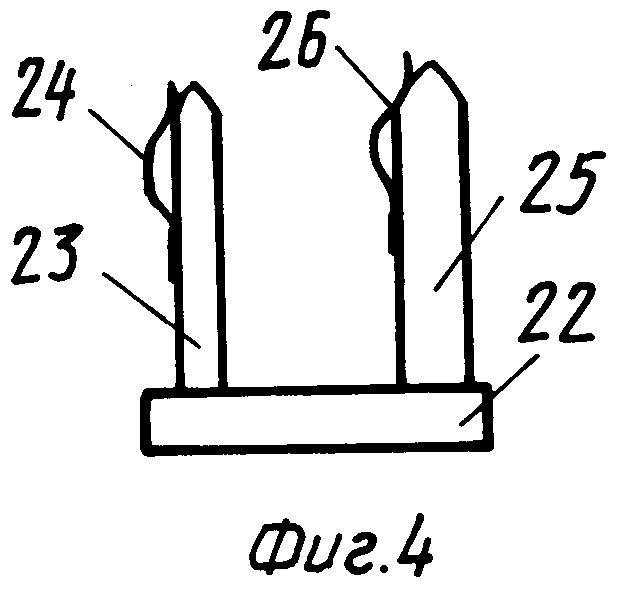
На фиг. 4 - вилочный захват.
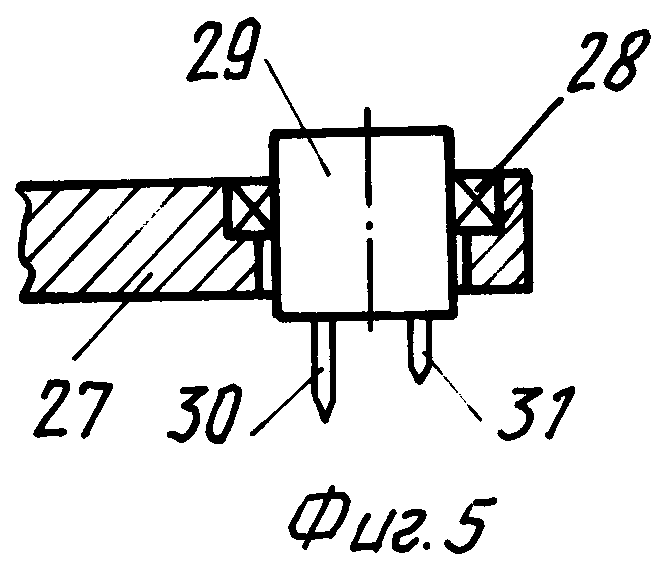
На фиг. 5 - цилиндрический захват.
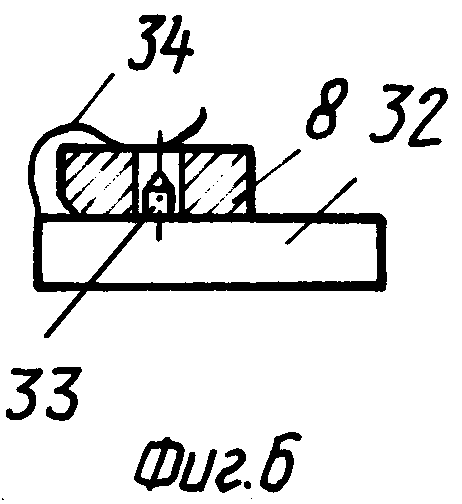
На фиг. 6 - финишный захват зондов.
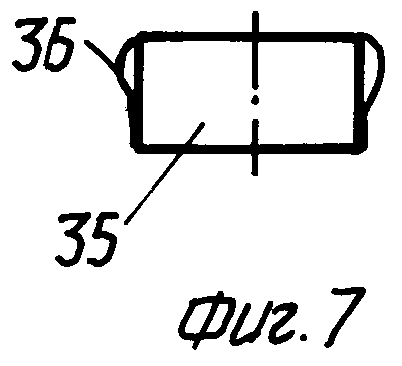
На фиг. 7 - финишный захват образцов.
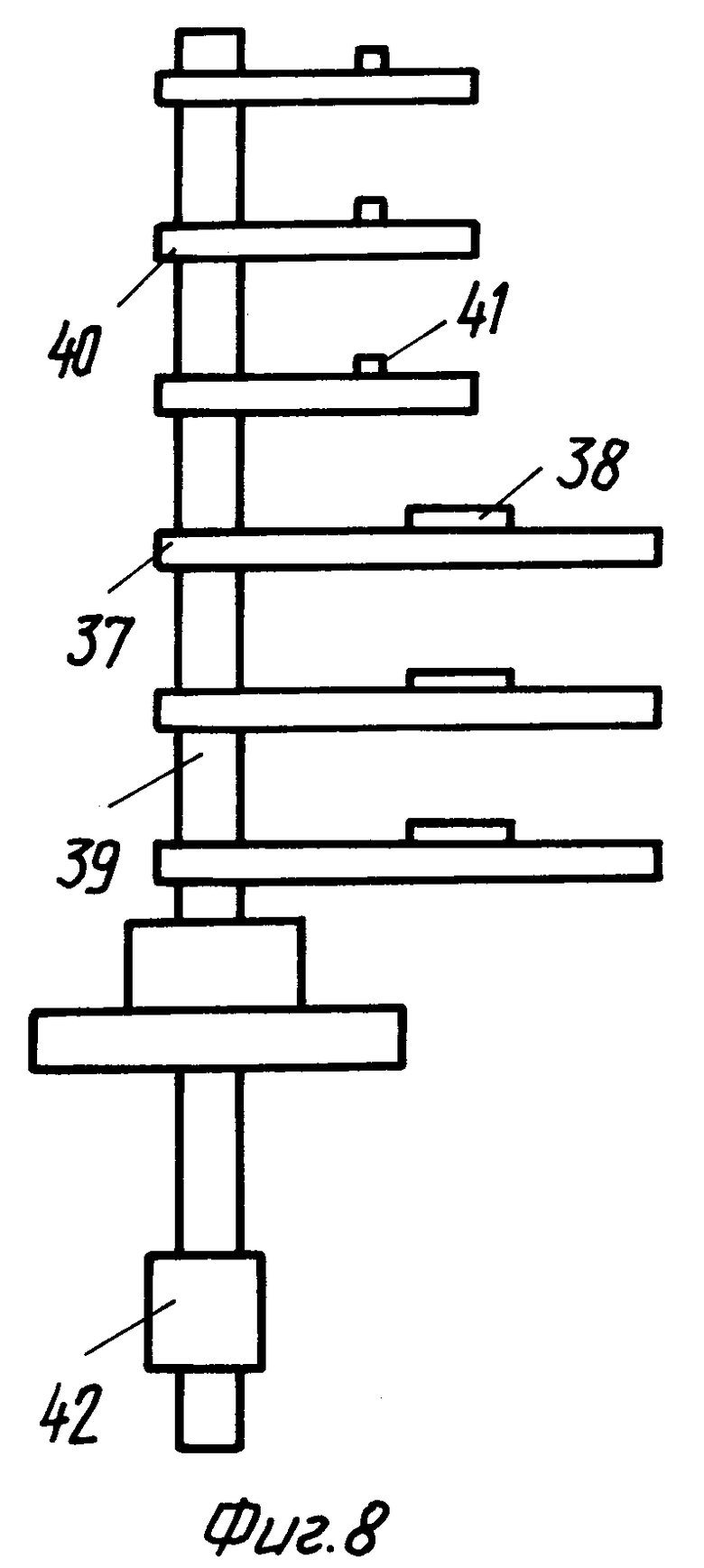
На фиг. 8 - кассета этажерочного типа.
Сверхвысоковакуумная транспортная система (фиг. 1) содержит загрузочную камеру 1, к которой подсоединены линейный поворотный манипулятор 2 с поворотным цилиндрическим захватом 3, линейный поворотный манипулятор 4 с вилочным захватом 5, линейный поворотный манипулятор 6 с кассетой 7 этажерочного типа носителей 8 зондов и носителем 9 образцов. Транспортная система включает в себя также измерительную камеру 10 с манипулятором 11, имеющим перемещения по координатам X, Y, Z и Q.
На манипуляторе 11 установлен вилочный захват 12, аналогичный захвату 5.
В камере 10 в позиции измерения установлен финишный захват 13 носителей зондов и финишный захват 14 носителей образцов. Загрузочная 1 и измерительная 10 камеры соединены посредством вакуумного затвора 15.
Носитель зондов (фиг. 2) выполнен в виде корпуса 16 с отверстиями 17 и профильным пазом 18 (зонды могут представлять собой металлический иглы, полупроводниковые прямоугольные пластинки и т. п. Крепление зондов к носителю может быть осуществлено пружиной, клеем, припоем и т.п. (зонды и способы их крепления к предмету изобретения также не относятся и подробнее не описаны).
Носитель объектов (фиг. 3) выполнен в виде корпуса 19 с отверстиями 20 и выборкой 21 (образцы и способы их закрепления к предмету изобретения не относятся и подробнее не описаны).
Вилочный захват (фиг. 4) содержит планку 22 со штоком 23 с пружиной 24 и с профильным штоком 25 с пружиной 26. (Профиль штока 25 может быть овальным, прямоугольным и т.п.).
Поворотный цилиндрический захват (фиг. 5) содержит планку 27, в которой с возможностью поворота (например, посредством вакуумного подшипника 28) установлен цилиндр 29 со штырьком 30 и 31 различной высоты. Финишный захват носителей зондов (фиг. 6) может быть выполнен, например, в виде планки 32 со штырьками 33 и пружиной 34. Финишный захват носителей образцов (фиг. 7) может быть выполнен, например, в виде платформы 35 с пружинами 36.
Следует заметить, что финишные захваты могут иметь различное исполнение, конкретное исполнение не относится к предмету изобретения и подробнее не описано.
Кассета этажерочного типа состоит из планок 37 с выступами 38, соединенных стойками 39 и планок 40 со штырьками 41, и закреплена на линейном поворотном манипуляторе 42.
Транспортная система работает следующим образом. Носители 8 зондов и носители 9 образцов устанавливают в кассету 7 соответственно на выступы 38 и штырьки 41. После герметизации и откачки загрузочной камеры 1 манипулятором 4 посредством захвата 5 и, в частности, профильного штока 25 носитель 8 зонда снимают со штырьков 41 планки 40, расположив кассету 7 в зоне пересечения манипуляторов 2 и 4. После этого кассету 7 уводят из зоны захвата 5 посредством манипулятора 6, используя дополнительное линейное перемещение. Передачу носителя 8 на захват 3 благодаря взаимоперпендикулярному размещению манипуляторов 2 и 4 осуществляют посредством поворота захвата 5 и установкой отверстий 17 на штырьки 30 и 31. Передачу носителя 8 зонда в измерительную камеру 10 проводят после открытия затвора линейным перемещением манипулятора 2, после чего поворачивают носитель 8 на поворотных штырьках 30 и 31 и профильным штоком 25 захвата 12 снимают носитель 8 с захвата 3. Установку носителя 8 в финишный держатель 13 проводят манипулятором 11. Наличие двух взаимоперпендикулярных перемещений установочного линейного поворотного манипулятора 11 позволяет осуществить его взаимодействие с первым линейным манипулятором 2, а именно состыковать в пространстве носитель 8 с захватом 12.
Установку носителей 9 образцов производят следующим образом. Манипулятором 4 посредством захвата 5 и в частности штоков 23 и 25 носитель 9 образца снимают с выступа 38, уводят кассету 7 из зоны захвата 5, и, используя поворот захвата 5 и пружинные свойства манипулятора 2, одевают носитель 9 на цилиндр 29. Передачу носителя 9 на финишный захват 14 проводят манипулятором 11, используя захват 12. Перемещение носителей 8 и 9 в кассету 7 осуществляют в обратном направлении.
Использование второго линейного поворотного манипулятора позволяет помимо съема носителей зондов и образцов из кассеты адаптировать предложенную транспортную систему к внешним транспортным системам, располагая их по оси второго манипулятора в зоне взаимодействия с его захватом, что расширяет функциональные возможности транспортной системы. Использование вилочных захватов позволяет использовать немагнитные материалы носителей, что также расширяет функциональные возможности. Использование профильной оси вилочного захвата позволяет ввести перемещение носителя зонда по окружности при вращении второго манипулятора, что упрощает захват и передачу носителей, т. е. эксплуатацию транспортной системы. Выполнение захвата первого манипулятора цилиндрическим поворотным со штырьками позволяет благодаря возможности поворота носителей зондов и образцов также упростить эксплуатацию системы. Использование штырьков различной длины повышает надежность транспортной системы. Использование этажерочной кассеты позволяет модульно наращивать число позиций без изменения ее конструкции, что упрощает транспортную систему. Использование линейного перемещения кассеты и второго линейного поворотного манипулятора позволяет наращивать функции транспортной системы благодаря возможности расположения ее в необходимой зоне относительно вилочного и цилиндрического захватов.
Например, возможно страховать передачу носителей с захвата на захват, поправлять носители на захватах, воздействовать дополнительно на объект с целью скола и т.п. Снабжение установочного манипулятора дополнительными перемещениями упрощает загрузку и выгрузку носителей из финишных захватов. Кроме этого широта манипуляций в зоне измерения позволяет размещать объекты и зонды в широком диапазоне размеров, что необходимо для оперативного воздействия на них непосредственно перед измерением (чистка зондов и образцов, напыление и т.д.). Это также позволяет проводить микроремонт измерительной системы. Использование сквозной единой системы крепежных элементов позволяет упростить транспортную систему. Использование передачи зондов и образцов внутри измерительной камеры позволяет автономно использовать СЗМ.
ЛИТЕРАТУРА
1. Information of Park Scientific Instruments firm. Auto Probe UHV Scanning Probe Microscope, 1994.
2. Патент США N5157256, HOU 37/26, 1991.
3. Information of Omicron. Multi-mode UHV Scanning Probe Microscope, p. 1,2.
| название | год | авторы | номер документа |
|---|---|---|---|
| СВЕРХВЫСОКОВАКУУМНАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2006 |
|
RU2380785C2 |
| НАНОТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС | 2006 |
|
RU2308782C1 |
| УСТРОЙСТВО НАГРЕВА ДЛЯ СКАНИРУЮЩИХ ЗОНДОВЫХ МИКРОСКОПОВ | 2001 |
|
RU2218562C2 |
| СВЕРХВЫСОКОВАКУУМНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 1996 |
|
RU2161343C2 |
| УСТРОЙСТВО НАГРЕВА ДЛЯ СКАНИРУЮЩИХ ЗОНДОВЫХ МИКРОСКОПОВ | 1999 |
|
RU2169440C2 |
| СВЕРХВЫСОКОВАКУУМНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 1996 |
|
RU2152103C1 |
| НАНОТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС НА ОСНОВЕ ЭПИТАКСИАЛЬНЫХ И ИОННЫХ ТЕХНОЛОГИЙ | 2007 |
|
RU2390070C2 |
| УСТРОЙСТВО ПОДДЕРЖАНИЯ ТЕМПЕРАТУРЫ ОБЪЕКТА ДЛЯ СКАНИРУЮЩИХ ЗОНДОВЫХ МИКРОСКОПОВ | 2003 |
|
RU2244948C1 |
| НАНОТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2522776C2 |
| НАНОТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС НА ОСНОВЕ ИОННЫХ И ЗОНДОВЫХ ТЕХНОЛОГИЙ | 2010 |
|
RU2528746C2 |
Изобретение относится к нанотехнологическому оборудованию, к устройствам, обеспечивающим транспортировку и установку зондов и образцов в позиции измерения и функционального воздействия. В сверхвысоковакуумную транспортную систему для сканирующих зондовых микроскопов, содержащую линейный поворотный манипулятор с захватом, состыкованный с загрузочной камерой, кассету для носителей зондов и образцов с манипулятором, перемещающийся по оси установочный линейный манипулятор с захватом и измерительную камеру с финишным захватом зондов и образцов, введен второй линейный поворотный манипулятор с вилочным пружинным захватом, одна из осей которого выполнена профильной, захват первого линейного поворотного манипулятора выполнен цилиндрическим поворотным, со штырьками, кассета носителей зондов и образцов имеет этажерочное исполнение, манипулятор кассеты имеет возможность линейного перемещения, установочный линейный поворотный манипулятор имеет два дополнительных взаимоперпендикулярных перемещения в плоскости, перпендикулярной осевому перемещению, и вилочный пружинный захват с профильной осью. Подобное выполнение сверхвысоковакуумной транспортной системы позволяет расширить функциональные возможности, упростить конструкцию и повысить надежность устройства. 8 ил.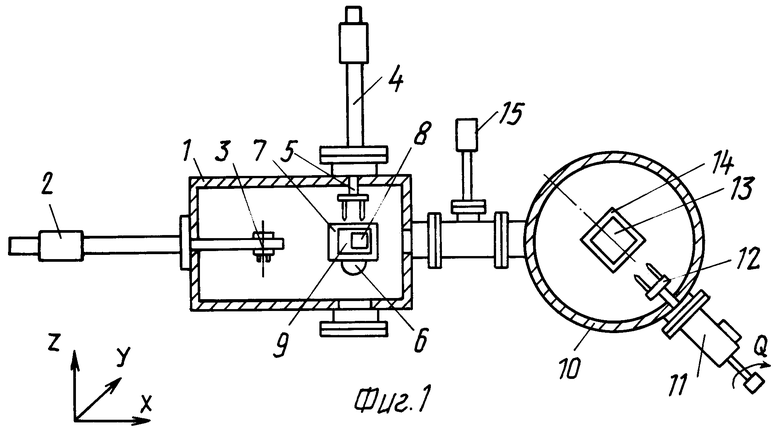
Сверхвысоковакуумная транспортная система для сканирующих зондовых микроскопов, содержащая линейный поворотный манипулятор с захватом, состыкованный с загрузочной камерой, кассету для носителей зондов и образцов с манипулятором, перемещающийся по оси установочный линейный манипулятор с захватом и измерительную камеру с финишным захватом зондов и образцов, отличающаяся тем, что в нее введен второй линейный поворотный манипулятор с вилочным пружинным захватом, одна из осей которого выполнена профильной, захват первого линейного поворотного манипулятора выполнен цилиндрическим поворотным, со штырьками, кассета носителей зондов и образцов имеет этажерочное исполнение, манипулятор кассеты имеет возможность линейного перемещения, установочный линейный поворотный манипулятор имеет два дополнительных взаимоперпендикулярных перемещения в плоскости, перпендикулярной осевому перемещению и вилочный пружинный захват с профильной осью, при этом второй линейный поворотный манипулятор пристыкован к загрузочной камере перпендикулярно первому линейному поворотному манипулятору, этажерочная кассета с манипулятором размещена в загрузочной камере, в зоне пересечения двух линейных манипуляторов, установочный линейный поворотный манипулятор пристыкован к измерительной камере, соединенной с загрузочной камерой с возможностью взаимодействия с первым линейным манипулятором.
| Information of Park Scientific Instruments firm | |||
| Прибор для охлаждения жидкостей в зимнее время | 1921 |
|
SU1994A1 |
| SU 5157256, 20.10.1992 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

