Изобретение относится к вакуумной технике и предназначено для проведения операций по перемещению объектов внутри вакуумных систем. Изобретение может быть использовано для осуществления загрузки и выгрузки зондов и образцов в сканирующих зондовых микроскопах, эксплуатируемых в условиях вакуума с ограниченным визуальным доступом к зоне перегрузки.
Известна сверхвысоковакуумная транспортная система для сканирующих зондовых микроскопов (СЗМ), содержащая линейный поворотный манипулятор, кассету для зондов и образцов и прецизионный манипулятор для установки зондов в позицию измерения [1, 2].
Недостатки указанного устройства заключаются в сложности и соответственно в низкой надежности устройства, связанной с расположением кассеты в зоне измерения, что приводит также к сложности адаптации и перенастраиваемости этой системы.
Известна также сверхвысоковакуумная транспортная система для сканирующих зондовых микроскопов, содержащая линейный поворотный манипулятор с магнитным захватом, состыкованный с загрузочной камерой, установочный линейный манипулятор качания, снабженный механическим захватом, карусельную кассету зондов и образцов с поворотным манипулятором, состыкованные с камерой хранения зондов и образцов и измерения, которая, в свою очередь, соединена с загрузочной камерой [3].
Недостатки указанного устройства заключаются в ограниченных функциональных возможностях транспортной системы, связанной с использованием магнитного захвата, что, в свою очередь, накладывает ограничение на магнитные исследования, а также ограничивает выбор материалов держателя. Второй недостаток заключается в сложности конструкции, что определяется наличием как магнитного захвата, так и механического. Сложность конструкции приводит соответственно к снижению надежности всей системы и усложнению эксплуатации.
Известна транспортная система для сканирующих зондовых микроскопов, включающая первый манипулятор с захватом, состыкованный с загрузочной и измерительной камерами. При этом захват сопряжен с первым носителем зондов и вторым носителем образцов, расположенными с возможностью взаимодействия с первым и вторым держателями загрузочной камеры и третьим и четвертым держателями измерительной камеры. Первый и второй держатели содержат первый и второй ловители и первый и второй упоры соответственно и сопряжены со вторым манипулятором, установленным на загрузочной камере [4].
Основной недостаток этого устройства заключается в отсутствии средства автоматической установки носителей зондов и образцов в держатели, что снижает надежность работы устройства, особенно в случае ограниченного взаимного доступа к зоне перегрузки.
Задача изобретения заключается в создании универсальной транспортной системы для осуществления загрузки-выгрузки зондов и образцов в условиях ограниченного визуального доступа, например в вакуумных криостатах.
Технический результат заключается в повышении надежности эксплуатации транспортной системы.
Указанный технический результат достигается тем, что в сверхвысоковакуумной транспортной системе, содержащей загрузочную камеру с установленными на ней первым манипулятором с захватом и вторым манипулятором с кассетой для носителей зондов и носителей образцов, при этом загрузочная камера состыкована с измерительной камерой, содержащей первый держатель носителей зондов и второй держатель носителей образцов, кассета для носителей зондов и носителей образцов выполнена линейной, а захват первого манипулятора сопряжен с первым держателем носителей зондов и вторым держателем носителей образцов.
Возможен вариант, в котором захват содержит цилиндрическую поверхность с конусной образующей, второй держатель содержит цилиндрическую направляющую с конусным ловителем, при этом цилиндрическая поверхность расположена с возможностью взаимодействия с цилиндрической направляющей, а конусная образующая - с конусным ловителем.
Существует вариант, в котором захват содержит две планки, установленные на нем с возможностью фрикционной фиксации, при этом на планках установлены зацепы с возможностью пружинной подвижки относительно планок.
Существует также вариант устройства, содержащего возвратный механизм, захваты содержат первые выступы, носители зондов и образцов имеют крышки со вторыми выступами, а планки выполнены с клиньями, при этом первые выступы расположены с возможностью взаимодействия со вторыми выступами, клинья - с крышками, а возвратный механизм - с планками.
Возможен также вариант, в котором носитель образцов имеет конусную образующую, расположенную с возможностью взаимодействия с конусным ловителем.
Существует также вариант, в котором носитель зондов имеет контактные площадки, а первый держатель - пружину и упор, установленные с возможностью взаимодействия с контактными площадками.
На фиг.1 изображена сверхвысоковакуумная транспортная система в общем виде.
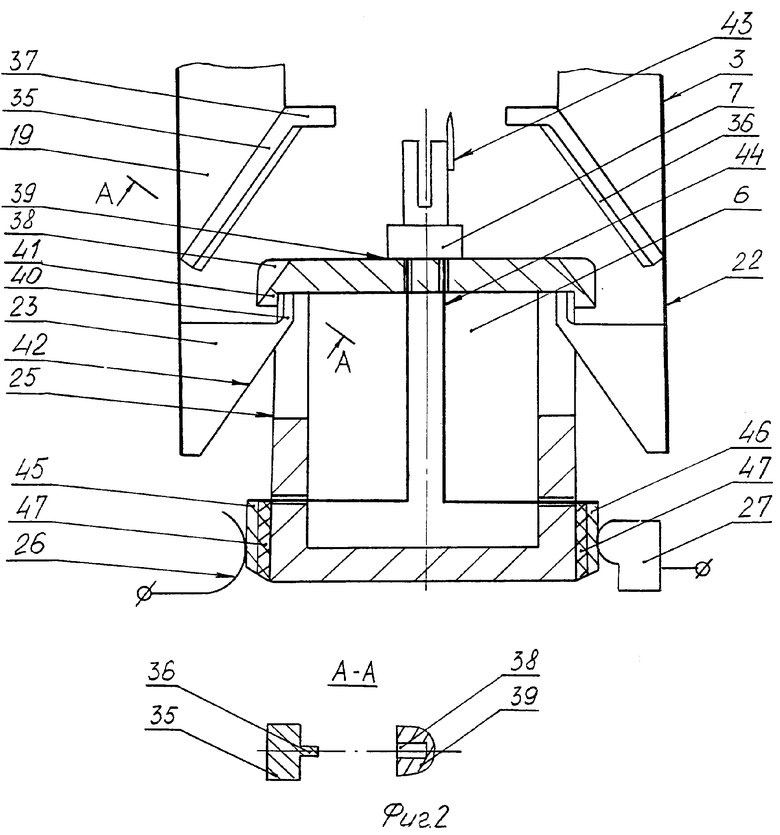
На фиг.2 - вариант выполнения захвата.
Сверхвысоковакуумная транспортная система (фиг.1) содержит загрузочную камеру 1, на которой закреплены первый линейный манипулятор 2 с захватом 3, второй линейный манипулятор 4 с кассетой 5, в которой установлены носители 6 зондов 7 (показан один) и носители 8 образцов 9 (также показан один). Загрузочная камера 1 через шлюз 10 соединена с измерительной камерой 11, в которой установлено измерительное устройство 12 с первым держателем 13 носителя 6 зонда 7, и второй держатель 14 носителя 8 образца 9. Держатель 14 содержит цилиндрическую направляющую 15 и конусный ловитель 16, установленный с возможностью взаимодействия с захватом 3. Захват 3 при этом содержит цилиндрическую поверхность 17 и конусную образующую 18. На захвате 3 установлены две планки 19, например, на разрезных пружинных осях 20 с возможностью поворота и фрикционной фиксации на них.
Планки 19 имеют клинья 21, плоские пружины 22, зацепы 23 и упоры 24. Пружины 22 могут быть выполнены в виде отдельных плоских элементов.
Носитель 6 зонда 7 может быть выполнен цилиндрическим с отверстиями 25. Держатель 13 может иметь электроизолированные пружину 26 и упор 27. Носитель 8 образца 9 выполняют цилиндрическим с отверстиями 28 (аналог отверстий 25) с конусной образующей 29.
В загрузочной камере может быть установлен возвратный механизм 30. Сканирующее устройство 12 установлено на фланце 31, герметично (не показано) соединенным с камерой 11. Также на фланце 31 посредством переходника 32 закреплен держатель 14. В кассете 5 гнездо для носителя 6 может содержать пружину 33 и упор 34, а гнездо носителя 8 быть аналогом держателя 14.
В одном из вариантов (фиг.2) захват 3 дополнительно содержит направляющие 35 с полозьями 36 и упорами 37. Направляющие 35 при этом закреплены на планках 19 и расположены с возможностью взаимодействия с выборками 38, выполненными в крышке 39. Зацепы 23 могут иметь первые выступы 40, расположенные с возможностью взаимодействия со вторыми выступами 41 крышки 39. Кроме этого, зацепы 23 содержат гладкие поверхности 42. Следует заметить, крышки 39 с выступами 41 на носителях 6 и 8 одинаковы.
Зонд 7, выполненный, например, в виде кварцевого резонатора с иглой 43, проводниками 44 может быть соединен с контактными площадками 45 и 46, закрепленными через изоляторы 47 на носителе 6 с возможностью взаимодействия с пружиной 26 и упором 27, через которые можно подавать и снимать электрические сигналы с зонда 7.
Измерительное устройство 12, включающее систему предварительного сближения зонда 7 и образца 9, а также блок анализа (не показаны), может представлять собой сканирующий зондовый микроскоп.
Камера 1 сопряжена со средствами откачки 48, а измерительная камера 11 размещена в гелиевом криостате 49. Подробно элементы системы, такие как 2, 4, 10, 12, 48, описаны в [1, 2, 3, 4, 5, 6].
Транспортная система работает следующим образом. Манипулятор 2, используя захват 3, а именно раздвигаемые благодаря плоским пружинам 22 зацепы 23, и пользуясь отверстиями 2, вынимают носитель 7 из кассеты 5. После открытия шлюза 10 осуществляют перенос носителя 6 в измерительную камеру 11 и его установку в держатель 13. Введение носителя 6 под пружину 26 осуществляется благодаря дальнейшему перемещению захвата 3 вниз и после взаимодействия клиньев 21 со стенками носителя 6. При этом происходит разведение планок 19 и ориентация в этом положении благодаря осям 20, после чего зацепы 23 выводят из отверстий 25. Одновременно конусная образующая 18 захвата 3, соприкасаясь с конусным ловителем 16, ограничивает перемещение захвата 3 вниз. После этого возможно перемещение захвата 3 вверх для переноса носителя 8 с образцом 9 в зону измерения. Для этого за счет взаимодействия упоров 23 с механизмом 30 планки 19 возвращают в исходное положение.
Захват носителя 8 и извлечение его из кассеты осуществляют аналогично захвату носителя 6. А именно: зацепы 23, используя плоские пружины 22, вводят в отверстие 28 и извлекают носитель 8 из гнезда. После этого его перемещают в камеру 11 и устанавливают в держатель 14 на конусную образующую 18. Размыкание захвата 3 с носителем 8 осуществляется аналогично описанному выше.
Специфика работы захвата по фиг.2, 3 заключается в следующем. После касания контактных площадок 45 и 46 пружины 26 и упора 27 полозья 36 попадают в выборки 38 и скользят по ним до касания по ним упорами 37 крышки 39. Благодаря этому носитель 6 фиксируется между пружиной 26 и упором 27 с одновременным электрическим контактом с ними.
Извлечение носителя 7 происходит благодаря взаимодействию первых 40 и вторых 41 выступов.
После загрузки зонда 7 и образца 9 в измерительную камеру 11 происходит их сближение и последующее сканирование поверхности образца 9 зондом 7. Сканирование осуществляет устройство 12, а управление этим процессом - блок анализа, входящий в состав сканирующего зондового микроскопа.
Выполнение кассеты для носителей образцов линейной, а захвата первого манипулятора - сопряженным с первым держателем носителей зондов и вторым держателем носителей образцов за счет уменьшения количества передач объектов и непосредственного взаимодействия захвата первого манипулятора с первым и вторым держателями, повышает надежность устройства.
Снабжение захвата цилиндрической поверхностью с конусной образующей, расположенной с возможностью взаимодействия с цилиндрической направляющей и конусным ловителем, обеспечивает точное позиционирование захвата относительно первого держателя и соответственно большую надежность загрузки и выгрузки носителей зондов.
Выполнение планок с возможностью фрикционной фиксации на захвате и зацепов с пружинной подвижкой относительно планок повышает надежность передачи носителей зондов и носителей образцов.
Введение возвратного механизма, взаимодействующего с планками первых выступов, взаимодействующих со вторыми, а клиньев - с крышкой, вводят дополнительные фиксируемые перемещения элементов захвата, что и повышает надежность его работы.
Снабжение носителя образцов конусной образующей, взаимодействующей с конусным ловителем за счет точной ориентации носителей образцов, повышает надежность их загрузки-выгрузки.
Снабжение носителей зондов контактными площадками, взаимодействующими с пружиной и упором, повышает надежность электрических контактов.
Таким образом, предложенное устройство повышает надежность его эксплуатации в условиях ограниченной видимости.
ЛИТЕРАТУРА
1. Information of Park Scientific Inxtruments firm. Auto Probe UHV Scanning Probe Microscope, 1994 г.
2. Патент США №5157256, H01J 37/26, 1991 г.
3. Information of Omicron. Multi-mode UHV Scanning Probe Microscope, р.1, 2.
4. Патент RU №2158454, 2000 г.
5. Вакуумная техника. Справочник, М.: Машиностроение, 1985 г., 359 с.
6. Высоковакуумные откачные устройства. М.: Энергия, 1969 г., 524 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СВЕРХВЫСОКОВАКУУМНАЯ ТРАНСПОРТНАЯ СИСТЕМА ДЛЯ СКАНИРУЮЩИХ ЗОНДОВЫХ МИКРОСКОПОВ | 1999 |
|
RU2158454C1 |
| СВЕРХВЫСОКОВАКУУМНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 1996 |
|
RU2152103C1 |
| СВЕРХВЫСОКОВАКУУМНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 1996 |
|
RU2161343C2 |
| УСТРОЙСТВО ПОДДЕРЖАНИЯ ТЕМПЕРАТУРЫ ОБЪЕКТА ДЛЯ СКАНИРУЮЩИХ ЗОНДОВЫХ МИКРОСКОПОВ | 2003 |
|
RU2244948C1 |
| УСТРОЙСТВО НАГРЕВА ДЛЯ СКАНИРУЮЩИХ ЗОНДОВЫХ МИКРОСКОПОВ | 2001 |
|
RU2218562C2 |
| МАЛОГАБАРИТНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2004 |
|
RU2258901C1 |
| НАНОТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС | 2006 |
|
RU2308782C1 |
| КРИОГЕННЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2004 |
|
RU2271583C1 |
| НАНОТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2522776C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 1999 |
|
RU2159454C1 |
Изобретение относится к вакуумной технике и предназначено для проведения операций по перемещению объектов внутри вакуумных систем. Изобретение может быть использовано для осуществления загрузки и выгрузки зондов и образцов в сканирующих зондовых микроскопах, эксплуатируемых в условиях вакуума с ограниченным визуальным доступом к зоне перегрузки. Сверхвысоковакуумная транспортная система содержит загрузочную камеру с установленными на ней первым манипулятором с захватом и вторым манипулятором с кассетой для носителей зондов и носителей образцов, в которой загрузочная камера состыкована с измерительной камерой, содержащей первый держатель носителей зондов и второй держатель носителей образцов, кассета для носителей зондов и носителей образцов выполнена линейной, а захват первого манипулятора сопряжен с первым держателем носителей зондов и вторым держателем носителей образцов. Подобное выполнение устройства повышает надежность его эксплуатации в условиях ограниченного визуального доступа. 5 з.п. ф-лы, 2 ил.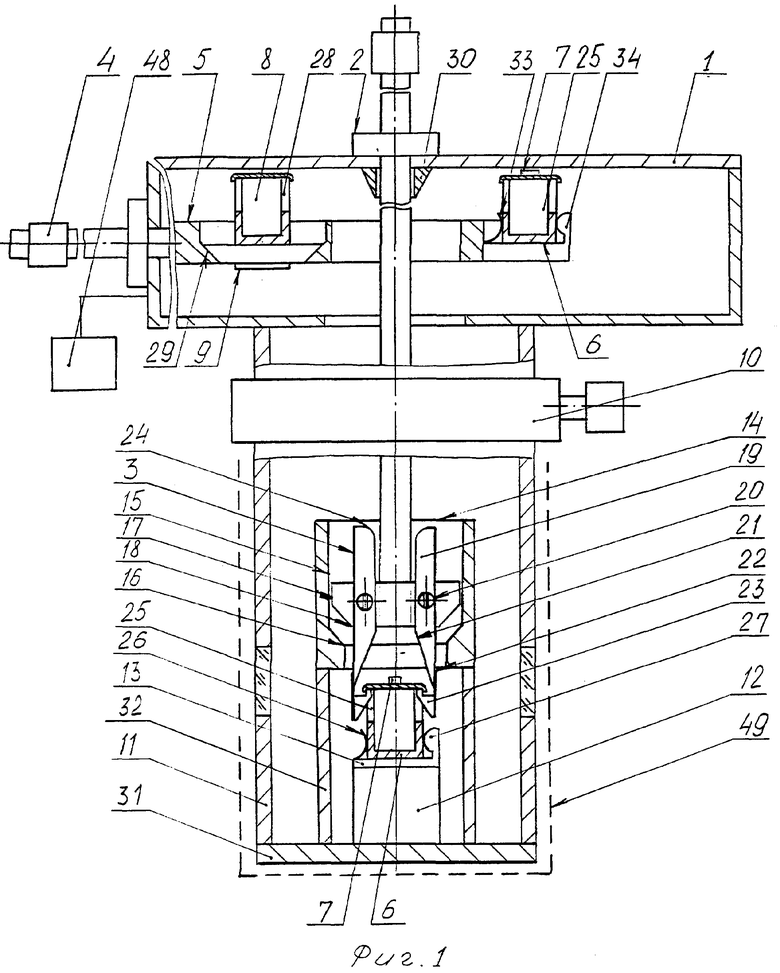
1. Сверхвысоковакуумная транспортная система, содержащая загрузочную камеру с установленными на ней первым манипулятором с захватом и вторым манипулятором с кассетой для носителей зондов и носителей образцов, при этом загрузочная камера состыкована с измерительной камерой, содержащей первый держатель носителей зондов и второй держатель носителей образцов, отличающаяся тем, что кассета для носителей зондов и носителей образцов выполнена линейной, а захват первого манипулятора сопряжен с первым держателем носителей зондов и вторым держателем носителей образцов.
2. Устройство по п.1, отличающееся тем, что захват содержит цилиндрическую поверхность с конусной образующей, второй держатель содержит цилиндрическую направляющую с конусным ловителем, при этом цилиндрическая поверхность расположена с возможностью взаимодействия с цилиндрической направляющей, а конусная образующая - с конусным ловителем.
3. Устройство по п.1, отличающееся тем, что захват содержит две планки, установленные на нем с возможностью фрикционной фиксации, при этом на планках установлены зацепы с возможностью пружинной подвижки относительно планок.
4. Устройство по п.3, отличающееся тем, что оно содержит возвратный механизм, захваты содержат первые выступы, носители зондов и образцов имеют крышки со вторыми выступами, а планки выполнены с клиньями, при этом первые выступы расположены с возможностью взаимодействия со вторыми выступами, клинья - с крышками, а возвратный механизм - с планками.
5. Устройство по п.2, отличающееся тем, что носитель образцов имеет конусную образующую, расположенную с возможностью взаимодействия с конусным ловителем.
6. Устройство по п.1, отличающееся тем, что носитель зондов имеет контактные площадки, а первый держатель - пружину и упор, установленные с возможностью взаимодействия с контактными площадками.
| СВЕРХВЫСОКОВАКУУМНАЯ ТРАНСПОРТНАЯ СИСТЕМА ДЛЯ СКАНИРУЮЩИХ ЗОНДОВЫХ МИКРОСКОПОВ | 1999 |
|
RU2158454C1 |
| ПЬЕЗОСКАНЕР С ТРЕХКООРДИНАТНЫМ ПЛОСКОПАРАЛЛЕЛЬНЫМ ПЕРЕМЕЩЕНИЕМ В ПЛОСКОСТИ ОБЪЕКТА | 2002 |
|
RU2227363C1 |
| КООРДИНАТНЫЙ СТОЛ | 2004 |
|
RU2254640C1 |
| US 5157256 A, 20.10.1992 | |||
| Главный желоб доменной печи | 1983 |
|
SU1216204A1 |

