Изобретение относится к нанотехнологическому оборудованию, а более конкретно к устройствам, обеспечивающим наблюдение, измерение и модификацию поверхности объектов в туннельном и атомно-силовом режимах.
Известен сверхвысоковакуумный сканирующий туннельный микроскоп STM2000, содержащий фланец, платформу с амортизатором, привод с пьезосканером и держатель объекта [1].
Недостатки указанного устройства заключаются в ограниченных возможностях демпфирования в связи с горизонтальным расположением платформы и в отсутствии атомно-силового режима исследования.
Известен также сверхвысоковакуумный сканирующий зондовый микроскоп, содержащий первую и вторую вакуумные камеры, манипулятор, соединенный с первой вакуумной камерой, платформу, на которой закреплены привод со сканером, держатель зонда с зондом, а также источник света в виде световода, сопряженного с лазером, и фотоприемник, оптически сопряженные с зондом, плиту с держателем объекта, состыкованную с платформой посредством привода со сканером, состоящего из пьезоэлементов, сопряженных с клиновым механизмом, и установленную через систему подвеса на первой вакуумной камере [2].
Недостатки указанного устройства заключаются в том, что оно содержит две сверхвысоковакуумные камеры, что усложняет конструкцию и снижает ее надежность, Второй недостаток заключается в необходимости размещения привода, источника света (световода) и фотоприемника в первой сверхвысоковакуумной камере, что также усложняет конструкцию и процесс юстировки и может оказаться источником привносимой дефектности, приводящей к снижению разрешающей способности. Кроме того, использование световода снижает полезный сигнал вследствие потерь в нем энергии, что может снижать надежность устройства. Использование системы подвеса в виде элементов сжатия, расположенных в первой сверхвысоковакуумной камере, ограничивает выбор демпфирующих материалов и их размеры, что приводит к недостаточной виброизоляции и к снижению разрешающей способности. Выполнение привода и сканера на одних и тех же пьезоэлементах с использованием клинового механизма может приводить к сдвигу зонда относительно объекта в процессе сканирования и подвода, что снижает функциональные возможности устройства.
Задачей является создание многофункционального сверхвысоковакуумного сканирующего зондового микроскопа.
Технический результат изобретения заключается в упрощении конструкции, расширении функциональных возможностей, повышении надежности и разрешающей способности устройства.
Это достигается тем, что в сверхвысоковакуумный сканирующий зондовый микроскоп, содержащий первую и вторую вакуумные камеры, манипулятор, соединенный с первой вакуумной камерой, платформу, на которой закреплены привод со сканером, держатель зонда с зондом, а также источник света и фотоприемник, оптически сопряженные с зондом, плиту с держателем объекта, сопряженную с платформой посредством привода, и систему подвеса, введены фланец с крышкой и первый сильфон, причем фланец сопряжен с первой вакуумной камерой, вторая вакуумная камера образуется фланцем с крышкой, соединенным через сильфон с платформой, и представляет собой форвакуумную камеру, привод расположен в форвакуумной камере и содержит двигатель с линейно перемещающимся штоком, сопряженным через второй сильфон с плитой, а также два упора и пружины, сопряженные с платформой и плитой, источник света представляет собой лазер и расположен вместе с фотоприемником в форвакуумной камере, сканер выполнен в виде пьезотрубки, которая установлена на плите и сопряжена с держателем объекта, а система подвеса состоит из пружин, расположенных в форвакуумной камере и соединяющих фланец с платформой, фиксаторов, закрепленных на фланце и расположенных с возможностью взаимодействия с платформой, и магнитного гасителя, установленного на платформе и фланце.
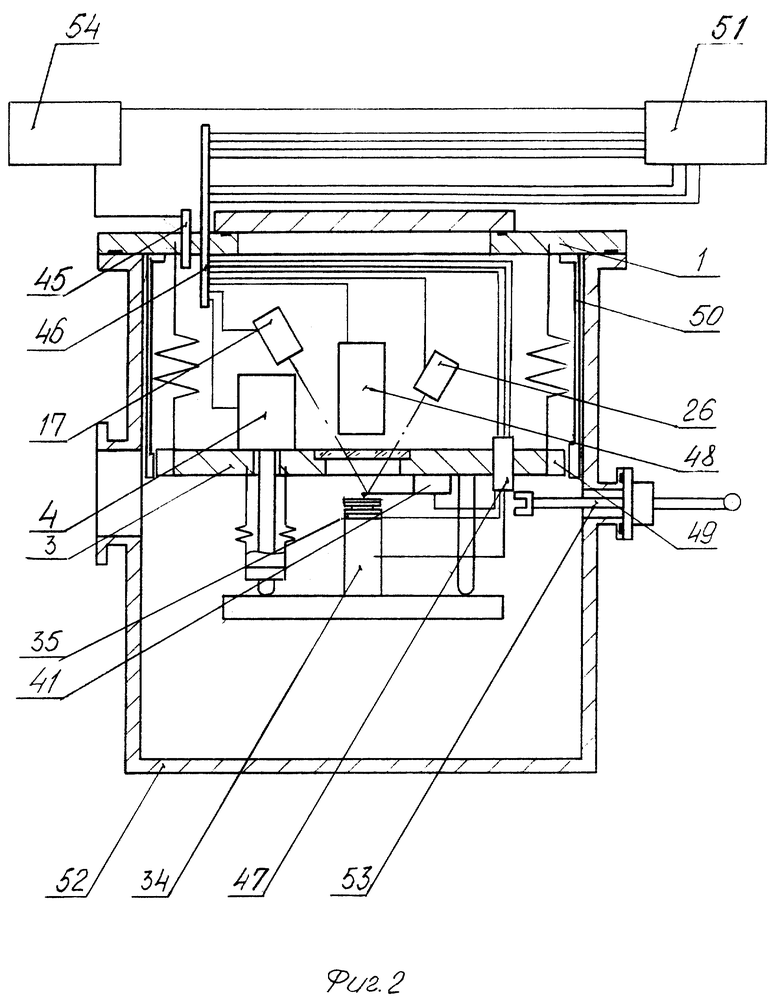
На фиг.1 изображен ССЗМ;
на фиг.2 - ССЗМ в совокупности с вакуумной камерой.
ССЗМ состоит из фланца 1 (фиг.1) с закрепленным на нем сильфоном 2 с внутренним эластичным покрытием, который в свою очередь соединен с платформой 3. На платформе 3 установлен привод, представляющий собой двигатель 4 с валом 5 и штифтом 6, который сопряжен с передачей, винт 7-гайка 8. Винт 7 имеет паз и находится во взаимодействии с направляющей втулкой 10. Винт 7 расположен внутри сильфона 11 и сферической поверхностью 12 находится во взаимодействии с упором 13 с шариком 14, который в свою очередь сопряжен с вставкой 15, изготовленной, например, из сапфира или поликора. Таким образом, винт 7 в совокупности с элементами 8,9,10 представляет собой линейно-перемещающийся шток, сопряженный через второй сильфон 11 посредством элементов 12, 13, 14 и 15 с плитой 33. На платформе 3 установлены также держатель 16 с лазером 17, сопряженный с толкателями 18 и 19, которые в свою очередь находятся во взаимодействии со вставками 20 (вторая вставка не показана).
Держатель 16 со вставкой 21 сопряжен также с прижимом 22 и может быть установлен на платформе 3 посредством шариков 23 и опор 24. Держатель 25 фотоприемника 26 установлен на платформе 3 аналогично держателю 16. Платформа 3 содержит стекло 27, ловитель 28, держатель 29 зонда 30, например, кантилевера. В качестве зонда может быть использована также игла туннельного микроскопа. На платформе 3 закреплены под углом 120o два упора 31, находящиеся во взаимодействии с опорами 32. Замыкает конструкцию плита 33 с пьезосканером 34 с ловителем 35 держателя 36 объекта 37. Плита 33 поджата к платформе 3 тремя пружинами 38. Платформа 3 подвешена на фланце 1 на пружинах 39 и расположена с возможностью взаимодействия посредством втулок 40 с тремя фиксаторами 41, закрепленными на фланце 1. На плите 33 установлены кассета 42 с держателями зондов и кассета 43 с держателями объектов. На фланце 1 закреплены крышка 44, штуцер 45 (фиг.2) и разъем 46. Разъем 47 установлен соответственно на платформе 3. На платформе 3 установлены также устройство наблюдения 48, которое может быть, например, видиконом или микроскопом, и система магнитов 49, сопряженная с медными планками 50, закрепленными на фланце 1 и образующими вместе с ними магнитный гаситель. Устройство наблюдения 48 может быть установлено с возможностью поворота для непосредственного наблюдения зоны измерения. Привод 4 (фиг.2), лазер 17, фотоприемник 26, ловитель 28 (для туннельного режима), пьезосканер 34, ловитель 35, устройство наблюдения 48 подсоединены к блоку управления 51. Толкатели 18 и 19, ловитель 35 и кассеты 42 и 43 предмета изобретения не представляют и подробнее не показаны. Блок управления 51 в данном случае также не представляет предмет изобретения и показан условно (подробнее см., например, [3],[4]).
ССЗМ сопряжен с вакуумной камерой 52, на которой установлен манипулятор 53 (см., например, [4]). Штуцер 45 подключен к устройству форвакуумной откачки 54. Вакуумная камера 52 может быть специальной камерой для ССЗМ, состыкованной с технологической вакуумной системой, манипулятор 53 при этом должен осуществлять перехват держателя объекта с основного манипулятора (не показан) технологической вакуумной системы.
Вместе с этим вакуумная камера 52 сама может быть технологической вакуумной камерой, при этом манипулятор 53 должен иметь возможность осуществлять необходимые технологические операции. Как в первом, так и во втором случае необходимо обеспечить возможность наблюдения манипуляций. Подробнее вакуумные камеры и манипулятор не описаны, т.к. не составляют предмета изобретения.
ССЗМ работает следующим образом. После установки ССЗМ в вакуумную камеру 52 осуществляют ее откачку, в результате чего при открытой крышке 44 происходит ориентация платформы 3 на фиксаторах 41. После этого при крайнем нижнем положении винта 7 производят необходимые замены объектов и зондов. Ориентацию лазера 17 и фотоприемника 26 относительно кантилевера 30 осуществляют посредством толкателей 18 и 19. Закрепляют крышку 44 на фланце 1 и включают устройство откачки 54, в результате чего платформа 3 оказывается подвешенной на пружинах 39 и сильфоне 2 и тем самым виброразвязанной от фланца 1. Используя привод 4, осуществляют подвод объекта 37 к зонду 30. После этого посредством пьезосканера 34 и зонда 30 осуществляют анализ или модификацию поверхности объекта 37.
Таким образом, использование форвакуумной камеры, позволяет размещать в ней источник света (лазер 17), фотоприемник 26 и привод 4, что упрощает конструкцию и процесс юстировки, уменьшает привносимую дефектность, а следовательно, повышает надежность подвеса в виде пружин растяжения 39, размещенных в форвакуумной камере, расширяет возможность выбора материала для них, повышает виброизоляцию и соответственно разрешающую способность. Разделение функций привода и сканера, а также использование привода 4 с угловым отклонением образца расширяет функциональные возможности микроскопа. Использование магнитного гасителя в совокупности с сильфоном улучшает виброизоляцию и повышает разрешающую способность.
Литература
1. STM2000, Scanning tunnelling for atomic resolution surface studies, VG Microtech. tel. (0825) 761077, telex 957603, fax (0825) 768343.
2. Q.Dai et.al. A variable temperature ultrahigh vacuum atomic force microscope. Rev. Sci. Imstrum. 66 (II), November 1995, p.5266-5271 (прототип).
3. Y.Kuh et.al. Scanning tunneling microscope instrumentation. Rev. Sci. lustrum. 60 (1989). N 20, p.165-180.
4. W. Gary et.al. The use of a linear piezoelectric actuator for coarce motion in a vacuum conpatible scanning tunneling microscope. J.Vac. Sci, Technol. A 7(4). Jul./Aug. 1989, p.2895-2897.
| название | год | авторы | номер документа |
|---|---|---|---|
| СВЕРХВЫСОКОВАКУУМНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 1996 |
|
RU2152103C1 |
| МАЛОГАБАРИТНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2004 |
|
RU2258901C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С ЖИДКОСТНОЙ ЯЧЕЙКОЙ | 2001 |
|
RU2210731C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 1999 |
|
RU2159454C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С ЖИДКОСТНОЙ ЯЧЕЙКОЙ | 2001 |
|
RU2210818C2 |
| СВЕРХВЫСОКОВАКУУМНАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2006 |
|
RU2380785C2 |
| СКАНЕР ТЕРМОКОМПЕНСИРОВАННЫЙ | 1999 |
|
RU2169401C2 |
| КРИОГЕННЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2004 |
|
RU2271583C1 |
| МНОГОЗОНДОВЫЙ МОДУЛЬ ДЛЯ СКАНИРУЮЩЕГО МИКРОСКОПА | 2006 |
|
RU2306524C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С КОНТРОЛИРУЕМОЙ СРЕДОЙ ИЗМЕРЕНИЯ | 2008 |
|
RU2401983C2 |
Изобретение относится к нанотехнологическому оборудованию, к устройствам, обеспечивающим наблюдение, измерение и модификацию поверхности объектов в туннельном и атомно-силовом режимах. Микроскоп содержит первую и вторую вакуумные камеры, манипулятор, платформу, на которой закреплены привод со сканером, держатель зонда с зондом, а также источник света и фотоприемник, оптически сопряженные с зондом, плиту с держателем объекта, сопряженную с платформой посредством привода, систему подвеса, фланец с крышкой и первый сильфон, причем вторая вакуумная камера образуется фланцем с крышкой, который соединен через первый сильфон с платформой, и представляет собой форвакуумную камеру, привод расположен в форвакуумной камере и содержит двигатель с линейно перемещающимся штоком, а также два упора и пружины, сканер выполнен в виде пьезотрубки, а система подвеса состоит из пружин, фиксаторов и магнитного гасителя, установленного на платформе и фланце. Технический результат - упрощение конструкции и юстировки, расширение функциональных возможностей, повышение надежности и разрешающей способности устройства. 2 ил.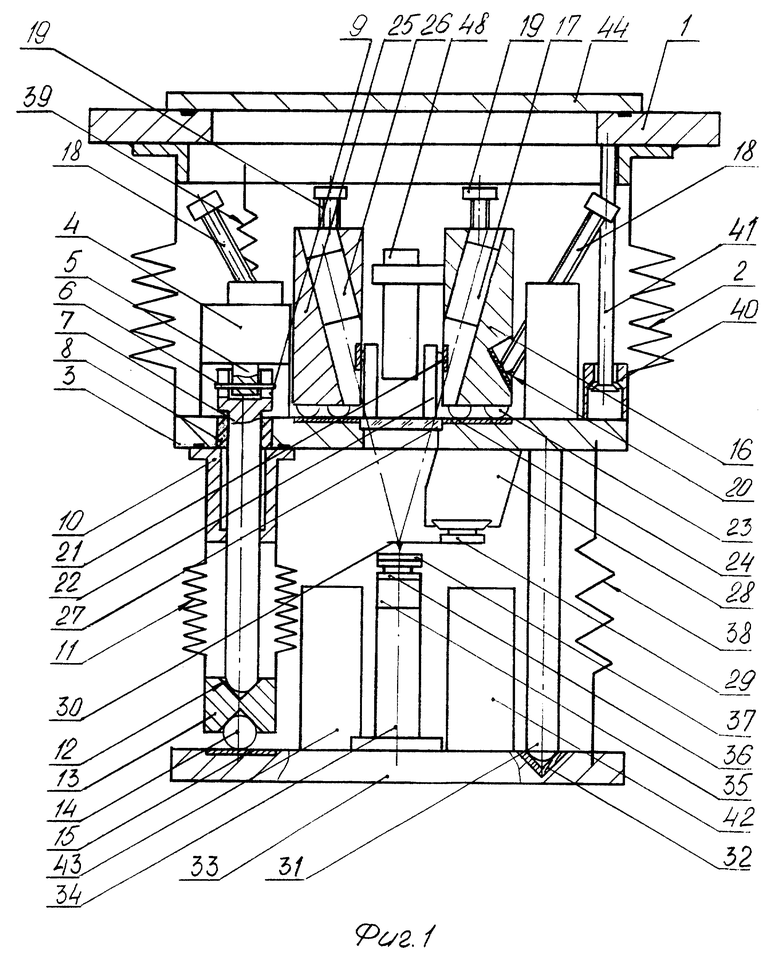
Сверхвысоковакуумный сканирующий зондовый микроскоп, содержащий первую и вторую вакуумную камеры, манипулятор, соединенный с первой вакуумной камерой, платформу, на которой закреплены привод со сканером, держатель зонда с зондом, а также источник света и фотоприемник, оптически сопряженные с зондом, плиту с держателем объекта, сопряженную с платформой посредством привода, и систему подвеса, отличающийся тем, что в него введены фланец с крышкой и первый сильфон, причем фланец сопряжен с первой вакуумной камерой, вторая вакуумная камера образуется фланцем с крышкой, соединенным через первый сильфон с платформой, и представляет собой форвакуумную камеру, привод расположен в форвакуумной камере и содержит двигатель с линейно перемещающимся штоком, сопряженным через второй сильфон с плитой, а также два упора и пружины, сопряженные с платформой и плитой, источник света представляет собой лазер и расположен вместе с фотоприемником в форвакуумной камере, сканер выполнен в виде пьезотрубки, которая установлена на плите и сопряжена с держателем объекта, а система подвеса состоит из пружин, расположенных в форвакуумной камере и соединяющих фланец с платформой, фиксаторов, закрепленных на фланце и расположенных с возможностью взаимодействия с платформой, и магнитного гасителя, установленного на платформе и фланце.
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| КЛАВИШНЫЙ МЕХАНИЗМ ПИАНИНО | 1998 |
|
RU2197752C2 |
| КАТУШЕЧНО-ЩЕТОЧНЫЙ ВЫСЕВАЮЩИЙ АППАРАТ | 1998 |
|
RU2134502C1 |

