Изобретение относится к электротехнике и может быть использовано в качестве электропривода вращательного или поступательного движения.
Известен электродинамический двигатель (а.с. СССР n 469194, М. кл.3 H 02 K 1/02), якорь которого совершает возвратно-поступательные движения. При движении якоря в одну сторону статор, если он не закреплен, движется в противоположную и силы взаимно уравновешиваются.
Недостатком этого устройства является взаимное уравновешивание сил статора и ротора.
Наиболее близкими к изобретению является устройства, работающие на принципе неуравновешенных электродинамических подсистем, описанные в книге Сигалов Р. Г. и другие. Новые исследования движущих сил магнитного поля. Ташкент, "Фан", 1975, с. 65-67, рис. 13, 72-74, 18, 20-23.
Недостатком описанных устройств является то, что дано только теоретическое обоснование устройств и опытные исследования схем.
Целью изобретения является доведение указанных устройств до их практического применения.
Поставленная цель достигается тем, что в электродинамическом двигателе, основанном на использовании неуравновешенных электродинамических подсистем, содержащий обмотку, выполненную в виде секций, уложенных на выступы пластин, из которых собран якорь, параллельно обмотка включена емкость, образуя колебательный контур, находящийся в резонансе токов, двигатель разделен на две равные половины, объединенные в одном корпусе, установленные на валах поворотного устройства с осью вращения, способных поворачивать их в обе стороны на 180o или на 90o относительно нулевого положения, когда векторы сил обоих половин направлены по одной прямой в противоположные стороны так, что когда векторы сил обоих половин направлены в одну сторону, происходит поступательное перемещение, а когда в разные стороны - вращательное движение.
Причем к одному источнику питания может быть подключено n электродинамических двигателей.
Обмотка двигателя может охлаждаться низкотемпературными жидкостями, например жидким азотом.
Обмотка двигателя, провода, соединяющие обмотку с емкостью и обкладки конденсаторов емкости могут быть выполнены из сверхпроводящих материалов, которые охлаждены до критических температур и находятся в сверхпроводящем состоянии.
Сущность предлагаемого электродинамического двигателя неуравновешенной электродинамической подсистемы представлена на фиг. 1-11.
На фиг. 1 представлена схема включения обмотки с индуктивностью L электродинамического двигателя с емкостью C, причем образованный при этом колебательный контур находится в резонансе токов.
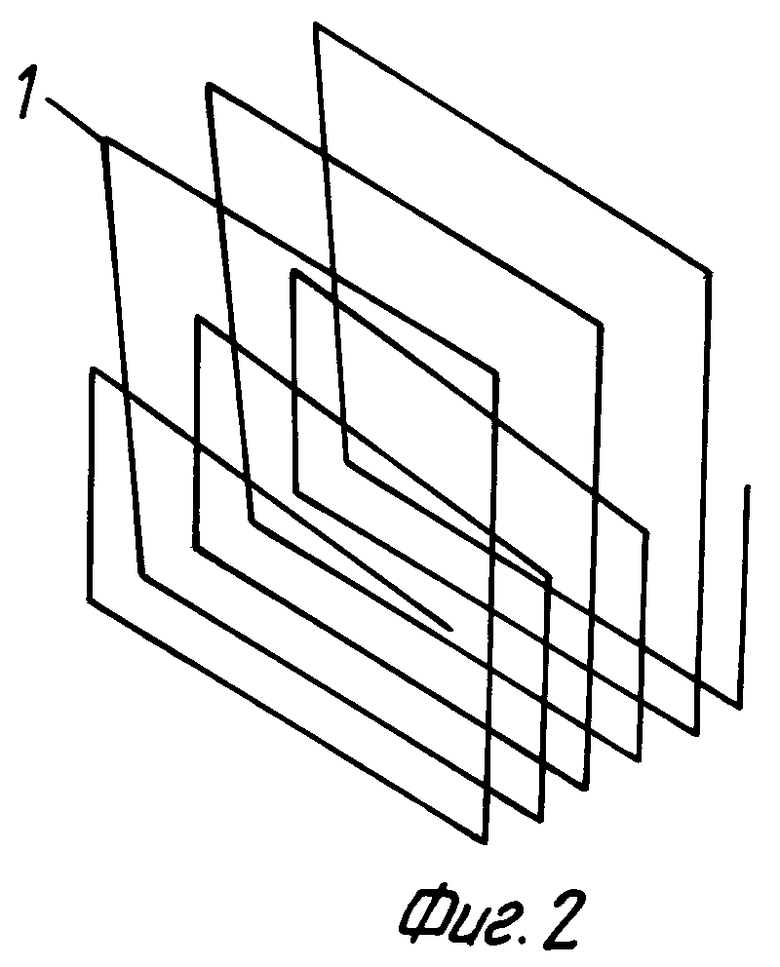
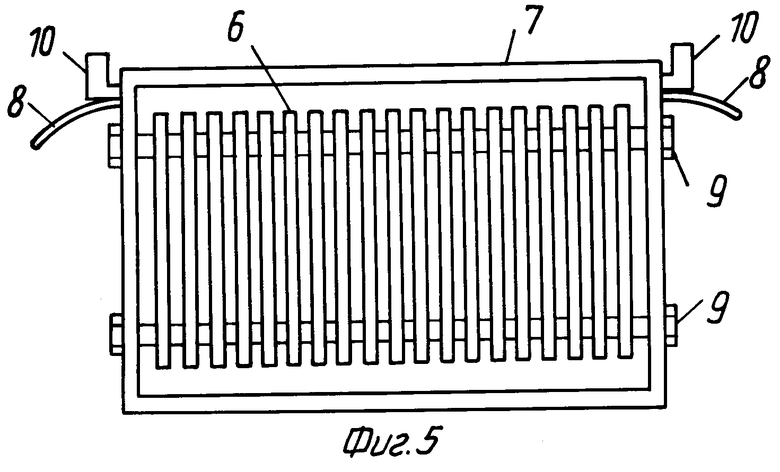
На фиг. 2-5 изображен электродинамический двигатель поступательного движения.
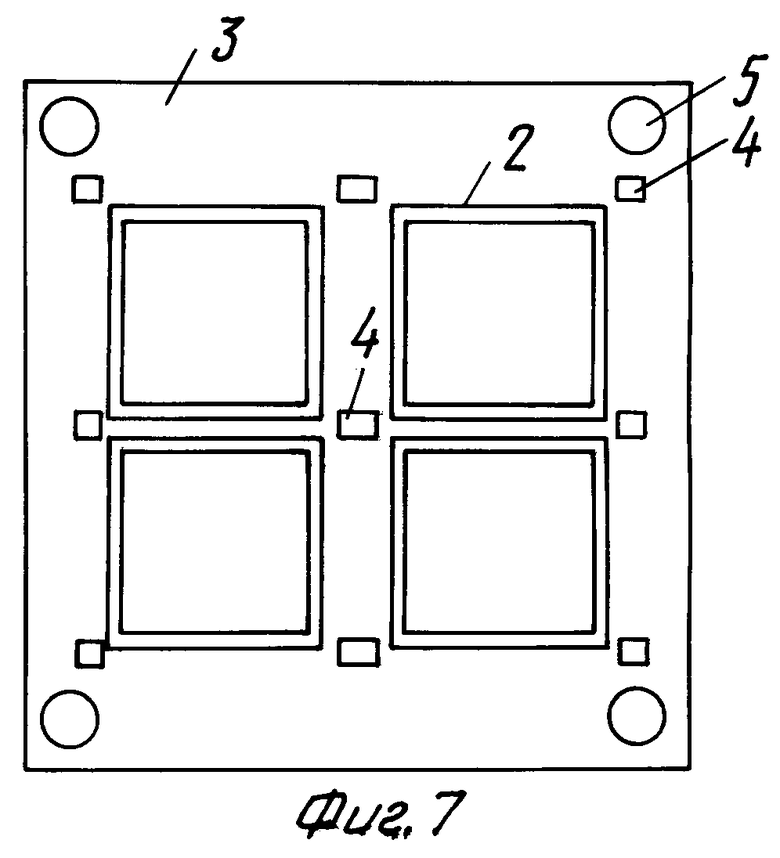
На фиг. 1 представлено несколько витков 1 обмотки двигателя. Витки наматываются на выступы 2 (фиг. 3) пластины 3 якоря и провода одной секции, пропускаются через отверстия 4 к другой секции. Отверстия 5 служат для болтов, скрепляющих пластины 3 в пакет, изображенный на фиг. 4, который образует якорь двигателя. Если провода не изолированы, то изолируются выступы 2 пластины 3 и вставляются изолирующие втулки в отверстия 4. На фиг. 3 не показаны. На фиг. 5 представлен электродинамический двигатель поступательного движения в сборе. Якорь 6 двигателя соединен с корпусом 7 при помощи болтов 9. Подача электрического тока на обмотку двигателя осуществляется с помощью щеточных токосъемников 10. Емкость соединена с обмоткой при помощи проводов 8.
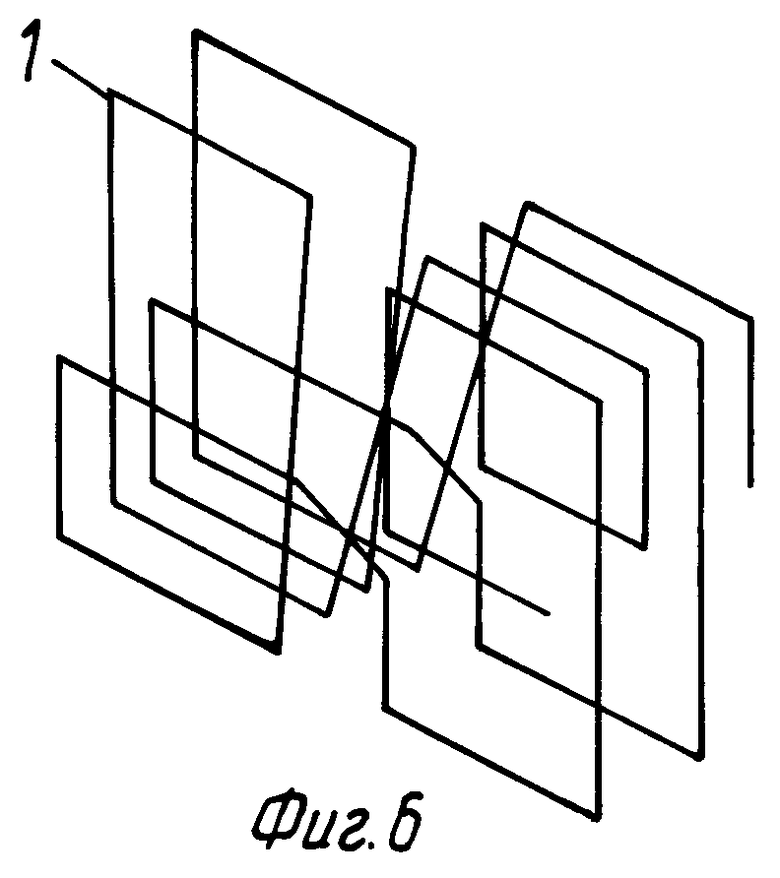
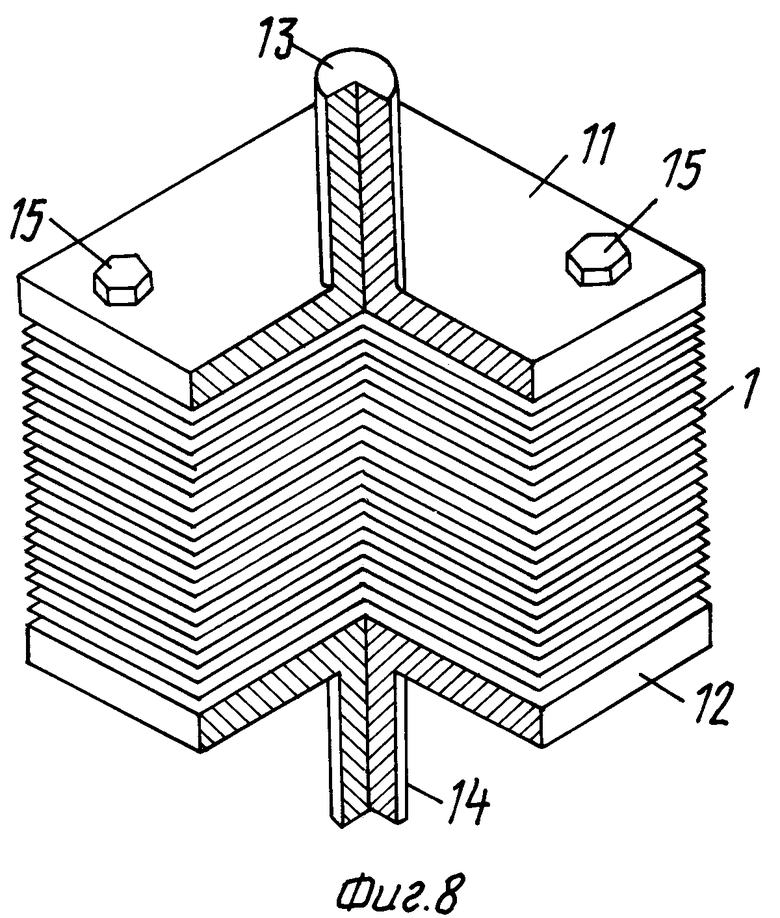
На фиг. 6-9 представлен электродинамический двигатель вращательного движения.
На фиг. 8 показан ротор двигателя в сборе. Пластины 1, фланцы 11 и 12, которые соединены с валами вращения 13 и 14, собраны в пакет и стянуты болтами 15, образуя при этом якорь двигателя. На фиг. 9 представлен электродинамический двигатель в сборе. Якорь 16 двигателя вращается на валах 13 и 14. Корпус 7 двигателя с торцов закрыт подшипниковыми щитами 17 с помощью болтов 18. Электрический ток подается на двигатель по проводам 19 на щетки 20, которые прикреплены к неподвижному держателю 21. Щетки 20 лежат на токосъемных кольцах 22. С токосъемных колец 22 ток по проводам 19 подается на обмотку двигателя. Емкость соединена с обмоткой с помощью проводов 8.
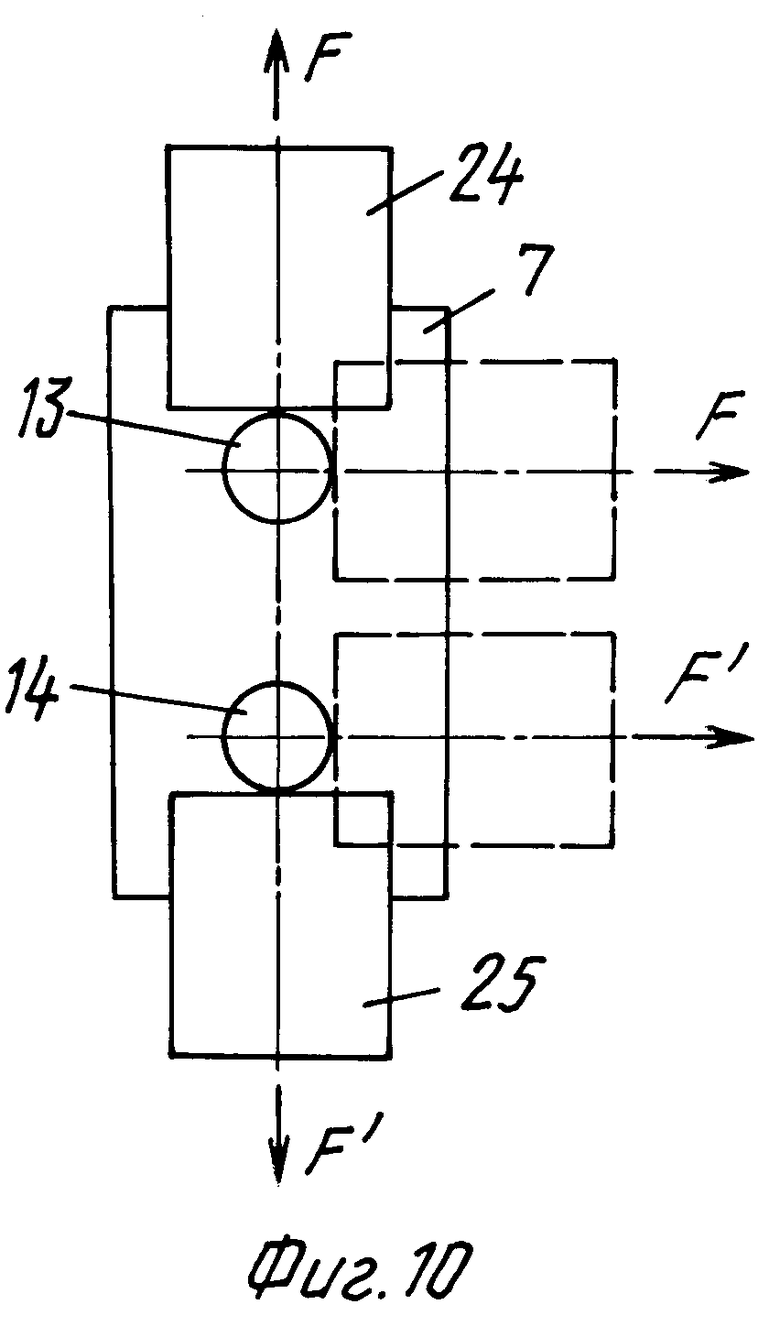
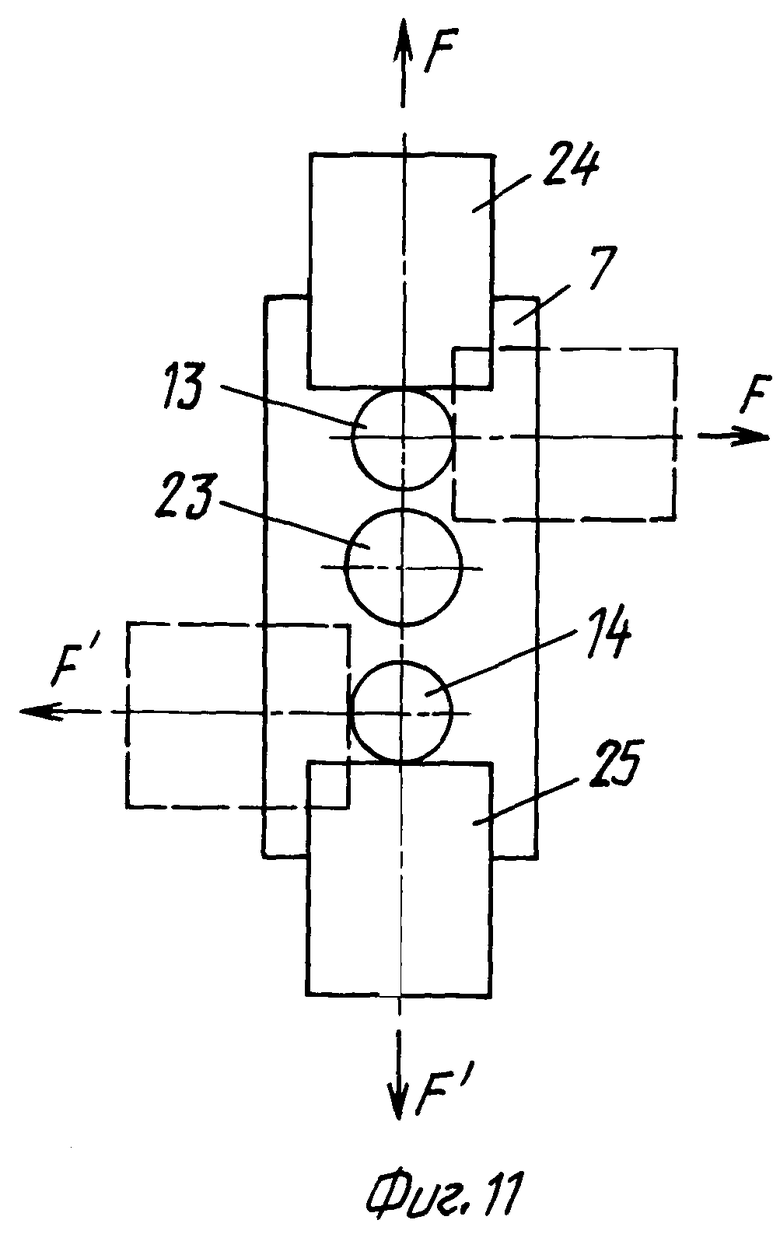
На фиг. 10 и 11 представлены электродинамические двигатели поступательного и вращательного движения.
На фиг. 10 представлен электродинамический двигатель поступательного движения. Двигатель состоит из двух равных половин 24, 25. половины 24 и 25 установлены на валах поворота 13 и 14, которые способны поворачивать половины 24 и 25 на 180o или на 90o относительно нулевого положения. Механизм поворота расположен в корпусе 7 и на фиг. 10 не показан.
На фиг. 11 представлен электродинамический двигатель вращательного движения. Двигатель состоит из двух равных половин 24, 25. Половины 24 и 25 установлены на валах 13 и 14 поворотного устройства. С их помощью половины 24 и 25 могут поворачиваться на 180o или на 90o в обе стороны от нулевого положения. Поворотное устройство смонтировано в корпусе 7 двигателя вращательного движения. На фиг. 11 оно не показано. Двигатель вращается на валу 23.
Электродинамический двигатель неуравновешенной электродинамической подсистемы работает следующим образом.
При включении тока в колебательном контуре, образованном обмоткой с индуктивностью L и включенной параллельно ей емкостью C, электродинамического двигателя возникают электромагнитные колебания с резонансной частотой, определяемой по формуле
где L - индуктивность катушки (обмотки) электродинамического двигателя;
C - емкость конденсаторов.
Если активные сопротивления параллельных ветвей равны нулю, то емкостный ток равен
а индуктивный IL = Uвx/(ωL). Индуктивный и емкостный токи противоположны по фазе и равны по амплитуде, а по отношению к источнику тока они взаимно компенсируются. Реактивный ток замыкается в кольцо, образуемое индуктивностью и емкостью, а провода, соединяющие колебательный контур с источником энергии, и самый источник энергии полностью разгружаются от реактивного тока. Поэтому к одному источнику тока можно подключить n-е количество электродинамических двигателей, колебательный контур которых находится в резонансе токов.
В самой обмотке электродинамического двигателя при резонансе токов возникает ток, определяемый по формуле. При соответствующем подборе входного напряжения Uвх, частоты и индуктивности обмотки двигателя реактивный ток может достигать сотен тысяч ампер. Электрический ток такой силы, проходя по обмотке электродинамического двигателя неуравновешенной электродинамической подсистемы, создает в витках обмотки (катушки) силу, равную сотням и даже тысячам килограмм на один виток. Под действием такой силы якорь начинает двигаться, а ротор вращаться.
Управление скоростью движения электродинамического двигателя осуществляется с помощью изменения входного напряжения, а также отключением части витков катушки или части конденсаторов емкости. В последнем случае колебательный контур выходит из резонанса токов, ток в обмотке двигателя уменьшается - уменьшается и электродвижущая сила в обмотке якоря (ротора) электродинамического двигателя.
Электродинамический двигатель поступательного или вращательного движения состоит из двух объединенных в одном корпусе равных половин. Электродинамические двигатели поступательного движения соединены с поворотным устройством, способным поворачивать эти двигатели на 180o вокруг оси или на 90o в обе стороны от нулевого положения. Нулевым положением является положение, при котором векторы сил обоих половин направлены в противоположные стороны по прямой линии, т.е. между их направлением 180o. При этом результирующая сила равна нулю.
Двигатель поступательного движения начинает двигаться при повороте обоих половин в одну сторону. Сила, с которой будет двигаться двигатель зависит от угла поворота обоих половин. Максимальную силу двигатель получает, когда направления векторов сил обоих половин параллельны друг другу. В этом случае результирующая сила равна сумме сил обоих половин. При повороте половин в противоположную сторону направление движения изменяется на 180o.
Двигатель вращательного движения имеет ось вращения. Он начинает вращаться, когда векторы сил половин направлены в разные стороны.
Охлаждение электродинамического двигателя может осуществляться через корпус, также принудительно путем пропускания охлажденного газа через якорь двигателя. Кроме того, можно охлаждать двигатель криогенными жидкостями, например жидким азотом.
При выполнении проводов обмотки двигателя, соединительных проводов и обкладок конденсатора из сверхпроводящего материала и охлаждении их до критических температур проводники переходят в сверхпроводящее состояние. В этом случае образуется практически идеальный колебательный контур, в котором электромагнитные колебания будут мало затухать.
Питание двигателей осуществляется переменным током, а также постоянным, преобразуя его в переменной стабилизированной частоты. Последняя схема питания двигателей предпочтительна, т. к. нестабильность частоты внешнего источника не будет влиять на работу двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛУЧЕНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 1997 |
|
RU2158053C2 |
| ЭЛЕКТРОРЕЗОНАНСНЫЙ ПРИВОД | 2005 |
|
RU2310264C2 |
| ГЕНЕРАТОР ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 1995 |
|
RU2097902C1 |
| СПОСОБ ХИМИКО-ТЕРМИЧЕСКОЙ ОБРАБОТКИ МЕТАЛЛОВ | 1995 |
|
RU2107111C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЭЛЕКТРОПРОВОДНОСТИ ГРУНТОВ | 1992 |
|
RU2044308C1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ПРИВОД КЛАПАНОВ | 1998 |
|
RU2140034C1 |
| ДВИГАТЕЛЬНАЯ УСТАНОВКА ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2601690C2 |
| Электромагнитный двигатель | 1946 |
|
SU69780A1 |
| ПЛАЗМЕННО-РЕАКТИВНЫЙ ЭЛЕКТРОДИНАМИЧЕСКИЙ ДВИГАТЕЛЬ | 2011 |
|
RU2472964C1 |
| ЭЛЕКТРОДИНАМИЧЕСКАЯ ПУШКА | 1997 |
|
RU2116604C1 |



Использование: в качестве электропривода поступательного или вращательного движения. Электродинамический двигатель неуравновешенной электродинамической подсистемы поступательного или вращательного движения содержит обмотку (катушку индуктивности), соединенную параллельно с ней емкостью. Причем колебательный контур, образованный индуктивностью и емкостью, находится в резонансе токов. Обмотка двигателя намотана на пластины, которые имеют для этого выступы и отверстия для пропускания проводов обмотки с одной пластины до другой. Кроме того, электродинамический двигатель состоит из равных по мощности половин, которые поворачиваются на валах на 90 и 180°, установленных на поворотном устройстве с осью вращения. Поступательное движение происходит, когда векторы сил обоих двигателей направлены в одну сторону, а вращательное, когда векторы сил направлены в разные стороны. Технический результат заключается в доведении до практического применения. 3 з.п. ф-лы, 11 ил.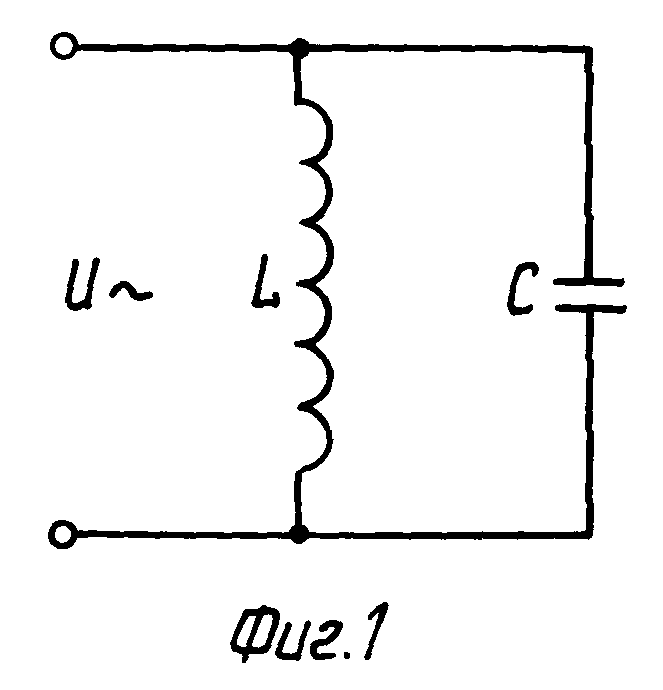
| СИГАЛОВ Р.Г | |||
| и др | |||
| Новые исследования движущихся сил магнитного поля | |||
| - Ташкент: Фан, 1975, с.65-67, рис.13, с.72-74, рис.18, 20-23 | |||
| Индуктор линейного цилиндрического электродвигателя | 1980 |
|
SU892595A1 |
| Электрическая машина переменного тока | 1982 |
|
SU1128344A1 |
| Шланговое соединение | 0 |
|
SU88A1 |
| ПАРАМЕТРИЧЕСКАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1992 |
|
RU2044397C1 |
| Фронтальный агрегат | 1984 |
|
SU1211413A1 |
| FR 2005057 А, 05.12.1969. | |||

