Изобретение относится к электрорезонансным приводам и может быть использовано в электротехническом машиностроении для создания электрических машин.
Известен резонансный привод, содержащий основание, на котором установлены подвижное звено, кинематически связанное с двигателем, фиксаторы крайних положений подвижного звена, дополнительные упоры, упругие элементы, отличающийся тем, что упругие элементы выполнены в виде торсионов с возможностью регулировки угла закрутки, одни концы которых закреплены в колесах самотормозящихся червячных передач, жестко установленных на основании, другие - в смонтированных в основании зубчатых колесах, сопряженных с подвижными секторами, с установленными на них регулируемыми упорами, посредством которых осуществляют поочередное взаимодействие с подвижным звеном, а устройства расфиксации выполнены в виде электромагнитных защелок, при этом все фиксаторы, упоры и устройство расфиксации смонтированы с возможностью регулировочных радиальных перемещений, относительно друг друга. В этой системе подвижное звено привода кинематически связано с двигателем и имеет фиксаторы крайних положений. Упругие элементы выполнены в виде торсионов с возможностью регулировки угла закрутки. Одни концы их закреплены в колесах самотормозящихся червячных передач, жестко установленных на основании. Другие концы закреплены в смонтированных в основании зубчатых колесах, сопряженных с подвижными секторами и с установленными на них регулируемыми упорами. Посредством упоров осуществляют поочередное взаимодействие с подвижным звеном. Устройства расфиксации выполнены в виде электромагнитных защелок. Привод позволяет произвести переналадку по параметрам хода и накопления энергии при изменении хода подвижного звена и при изменении усилия воздействия на него (см. патент РФ №2162791, кл. B25J 9/10, 10.02.2001).
Недостатками данной системы являются ее большие массогабаритные показатели и энергетические затраты при функционировании привода и невозможность преобразования одного вида движения в другой (например, вращательного движения в колебательное и/или наоборот).
Также известен используемый в качестве электропривода поступательного или вращательного движения электродинамический двигатель неуравновешенной электродинамической подсистемы поступательного или вращательного движения, который содержит обмотку (катушку индуктивности), соединенную параллельно с ней емкостью. Причем колебательный контур, образованный индуктивностью и емкостью, находится в резонансе токов. Обмотка двигателя намотана на пластины, которые имеют для этого выступы и отверстия для пропускания проводов обмотки с одной пластины до другой. Кроме того, электродинамический двигатель состоит из равных по мощности половин, которые поворачиваются на валах на 90 и 180°, установленных на поворотном устройстве с осью вращения. Поступательное движение происходит, когда векторы сил обоих двигателей направлены в одну сторону, а вращательное, когда векторы сил направлены в разные стороны (см. патент РФ №2158464, кл. Н02К 57/00, 27.10.2000).
Недостатками данного устройства также являются его большие массогабаритные показатели и потребляемая мощность электропривода, что не позволяет преобразовывать один вид движения в другой.
Техническим результатом, на который направлено предлагаемое техническое решение, является снижение его массогабаритных показателей (т.е. создания компактной конструкции) и уменьшение потребляемой мощности, а также расширение функциональных возможностей за счет управления одной из электрических машин независимо от скорости движения движущихся магнитных систем в другой машине, а также за счет передачи энергии от одной электрической машины к другой электрической машине.
Патентные исследования, проведенные на предмет поиска наиболее близкого к предлагаемому электрорезонансному приводу технического решения по патентным фондам ведущих стран мира, не выявили наиболее близкого аналога, что свидетельствует об отсутствии прототипа предлагаемого решения. В связи с этим следует указать на то, что указанный выше технический результат достигается за счет того, что электрорезонансный привод имеет первую электрическую машину, содержащую стационарные магнитные системы, размещенные на статоре, и движущиеся магнитные системы, расположенные на роторе, и вторую электрическую машину, содержащую стационарные магнитные системы, размещенные на основании и движущиеся магнитные системы, расположенные на перемещаемом относительно основания средстве, магнитопроводы стационарных и движущихся магнитных систем первой электрической машины выполнены невзаимодействующими и в виде навитых управляющих и рабочих обмоток, при этом выводы рабочих обмоток первых пар обмоток магнитопроводов стационарных и движущихся магнитных систем ротора первой электрической машины соединены с выводами встречно включенных рабочих обмоток движущихся магнитных систем второй электрической машины и выводами конденсаторов с возможностью образования резонансных контуров, функционирующих в режиме резонанса токов, выводы рабочих обмоток вторых пар обмоток магнитопроводов стационарных и движущихся магнитных систем ротора первой электрической машины соединены с выводами соответствующих встречно включенных рабочих обмоток стационарных магнитных систем второй электрической машины и выводами дополнительных конденсаторов с возможностью образования резонансных контуров, функционирующих в режиме резонанса токов, причем первые выводы управляющих обмоток стационарных и движущихся магнитных систем статора и ротора первой электрической машины, а также магнитопроводов стационарных и движущихся магнитных систем второй электрической машины подключены к выводам, по меньшей мере, одного блока формирования управляющих сигналов, вторые выводы управляющих обмоток первых пар обмоток магнитопроводов стационарных и движущихся магнитных систем первой электрической машины соединены со вторыми выводами встречно включенных управляющих обмоток движущихся магнитных систем ротора второй электрической машины, вторые выводы управляющих обмоток вторых пар обмоток магнитопроводов стационарных и движущихся магнитных систем первой электрической машины соединены со вторыми выводами соответствующих встречно включенных управляющих обмоток стационарных магнитных систем статора второй электрической машины. При этом, по меньшей мере, один блок формирования управляющих сигналов имеет, по меньшей мере, одну систему запуска, обеспечивающую генерирование сигналов тока заданной амплитуды в режиме резонанса второй электрической машины и/или, по меньшей мере, одну систему ограничения электрического тока в рабочих обмотках первой электрической машины и второй электрической машины и/или, по меньшей мере, одну систему синхронизации, обеспечивающую передачу заданного количества энергии между электрическими машинами, заданное значение скорости движения перемещаемого относительно основания средства второй электрической машины независимо от величины скорости вращения и направления вращения ротора первой электрической машины, и/или, по меньшей мере, одну систему ограничения напряжения электропитания, и/или, по меньшей мере, один блок электропитания. Магнитопроводы движущихся магнитных систем ротора первой электрической машины выполнены с возможностью вращения относительно магнитопроводов стационарных магнитных систем статора первой электрической машины по непересекающимся траекториям, при этом магнитопроводы движущихся магнитных систем второй электрической машины выполнены с возможностью перемещения относительно магнитопроводов стационарных магнитных систем второй электрической машины по непересекающимся траекториям. Кроме того, конденсаторы могут быть выполнены в виде электрических емкостей постоянной величины и/или электрических емкостей переменной величины и/или с использованием, по меньшей мере, одного магазина электрических емкостей, а, по меньшей мере, один блок электропитания выполнен с возможностью подключения к обмоткам магнитопроводов движущихся магнитных систем ротора первой электрической машины и обмоткам магнитопроводов движущихся магнитных систем второй электрической машины через электрические щетки и/или подвижные контакты.
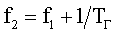
Сущность предложения поясняется на чертеже, где показана схема однофазного варианта конструкции электрорезонансного привода.
На чертеже показаны электрические элементы, входящие в конструкцию первой 1 и второй 2 электрических машин, каждая из которых может быть электрогенератором или электродвигателем, а также блок 3 формирования управляющих сигналов.
Электрическая машина 1 (электрогенератор или двигатель) включает в себя стационарные магнитные системы статора, состоящие из двух невзаимодействующих магнитным образом магнитопроводов, первый из которых имеет рабочую обмотку 4 и управляющую обмотку 6, второй - рабочую обмотку 5 и управляющую обмотку 7.
Движущиеся магнитные системы ротора электрической машины 1 (электрогенератора или двигатель) содержат два невзаимодействующих магнитным образом магнитопровода, первый из которых имеет рабочую обмотку 8 и управляющую обмотку 10, второй - рабочую обмотку 9 и управляющую обмотку 11.
Электрическая машина 2 (электрогенератор или электродвигатель) включает в себя стационарные магнитные системы, состоящие из двух невзаимодействующих магнитным образом магнитопроводов, первый из которых имеет рабочую обмотку 12 и управляющую обмотку 14, второй имеет рабочую обмотку 13 и управляющую обмотку 15.
Движущиеся магнитные системы электрической машины 2 (электрогенератор или электродвигатель) содержат два невзаимодействующих магнитным образом магнитопровода, первый из которых имеет рабочую обмотку 16 и управляющую обмотку 18, второй имеет рабочую обмотку 17 и управляющую обмотку 19.
В состав данного устройства (см. чертеж) также входят конденсаторы 20, 21, 22 и 23, которые совместно с соответствующими рабочими обмотками электрических машин 1 и 2 образуют резонансные контуры. При этом управляющие обмотки магнитных систем электрической машины 1 и электрической машины 2 с помощью блока 3 формирования управляющих сигналов способствуют достижению резонанса токов в соответствующих резонансных контурах.
Рассмотрим работу предлагаемого электрорезонансного привода в случае однофазного варианта реализации данного устройства. При этом четыре рабочие обмотки 4, 5 и 8, 9 электрической машины 1, четыре рабочие обмотки 12, 13 и 16, 17 электрической машины 2, четыре конденсатора 20, 21, 22 и 23 образуют четыре резонансных контура (см. чертеж). Эти контуры образованы, соответственно, из следующих элементов: а) 4, 20, 13; б) 8, 22, 12; в) 9, 23, 16 и 4) 5, 21, 17.
При этом электрические элементы 4, 13 и 20 образуют первый резонансный контур, характеризующийся резонансной частотой f1.
Электрические элементы 8, 12 и 22 образуют второй резонансный контур, характеризующийся резонансной частотой f2.
Электрические элементы 9, 16 и 23 образуют третий резонансный контур, резонанс в котором наступает на частоте f3.
Электрические элементы 5, 17 и 21 образуют четвертый резонансный контур, характеризующийся резонансной частотой f4.
При этом частоты f1, f2, f3 и f4 могут управляться путем изменения индуктивности за счет изменения величины соответствующего управляющего тока, подаваемого с соответствующих выводов блока 3 формирования управляющих сигналов на управляющие обмотки электрических машин 1 и 2. Резонансную частоту в соответствующем резонансном контуре можно также получить, изменяя значения емкостей конденсаторов 20-23. Это может происходить в случаях, когда имевших место изменений значений индуктивностей в резонансных контурах недостаточно для возникновения резонанса. При этом можно воспользоваться магазином емкостей, с помощью которого изменять значения емкости соответствующего конденсатора. Это все следует делать в зависимости от следующих соотношений значений резонансных частот резонансных контуров:

где f1 - значение частоты резонансных колебаний первого резонансного контура;
f2 - значение частоты резонансных колебаний второго резонансного контура;
f3 - значение частоты резонансных колебаний третьего резонансного контура;
f4 - значение частоты резонансных колебаний четвертого резонансного контура;
ТГ - положительное значение увеличенного в два раза периода времени, в течение которого один из полюсов движущихся магнитных систем ротора электрической машины 1 перемещается от одного полюса к другому, в противоположную сторону за счет вращения магнитных полей, причем данные полюса находятся на стационарных магнитных системах статора электрической машины, или отрицательное значение увеличенного в два раза периода времени, в течение которого один из полюсов движущихся систем ротора электрической машины 1 перемещается от одного полюса к другому в сторону вращения магнитных полей, находящихся на стационарных магнитных системах статора электрической машины 1;
Тдв - положительное значение увеличенного в два раза периода времени, в течение которого один из полюсов движущихся магнитных систем электрической машины 2 перемещается от одного полюса к другому в противоположную сторону за счет движения магнитных полей, причем данные полюса находятся на стационарных магнитных системах статора электрической машины 2, или отрицательное значение, увеличенное в два раза периода времени, в течение которого один из полюсов движущихся систем электрической машины 2 перемещается в сторону движения магнитных полей от одного полюса к другому, находящихся на стационарных магнитных системах электрической машины 2.
Следует также обратить внимание на то, что в электрической машине 1 магнитопроводы движущихся магнитных систем ротора перемещаются относительно магнитопроводов стационарных магнитных систем статора один против одного, другой против другого, при этом траектории их перемещения не пересекаются.
В электрической машине 2 магнитопроводы движущихся магнитных систем перемещаются относительно стационарных магнитных систем один против одного, другой против другого, при этом их траектории не пересекаются.
Полюса одной движущейся системы ротора электрической машины 1 сдвинуты по фазе на 90° относительно полюсов другой движущейся системы ротора электрической машины 1, в то время как полюса стационарных магнитных систем находятся в одной фазе.
Полюса одной движущейся системы электрической машины 2 сдвинуты по фазе на 90° относительно полюсов другой движущейся системы электрической машины 2, в то время как полюса стационарных магнитных систем находятся в одной фазе.
В электрической машине 2 количество полюсов его стационарных и движущихся магнитных систем может не совпадать.
Кроме того, при работе электрорезонансного привода в случае рассмотрения работы всех резонансных контуров ЭДС (электродвижущая сила), наводимая в управляющих обмотках электрической машины 1, должна совпадать с ЭДС, наводимой в соответствующей образующей контур управляющей обмотке электрической машины 2, причем входящие в данный резонансный контур рабочие обмотки образуют вместе с указанными выше управляющими обмоткам соответствующие магнитопроводы.
При этом, на указанных выше управляющих обмотках наводимые ЭДС имеют такие количественные значения с учетом их векторных направлений, что их суммарная ЭДС равна нулю.
При подаче крутящего момента (т.е. вращения на ротор электрической машины 1) и подаче тока подмагничивания с блока 3 формирования управляющих сигналов в управляющие обмотки магнитных систем электрической машины 1 и электрической машины 2 в соотношении, приводящим к вышеуказанному соотношению резонансных частот и при ТГ, стремящемуся при положительном значении к "∞", а при отрицательном значении - к "-∞" (т.е. к торможению) приводит к генерации резонансного тока в магнитных системах электрической машины 1. При достижении резонансным током амплитуды определенного значения путем изменения токов подмагничивания, ведущих к изменению значений резонансных частот в вышеуказанном соотношении, ведущим к изменению Тдв до требуемого значения (т.е. разгону в требуемом направлении и требуемом значении скорости перемещаемого средства относительно основания в электрической машине 2) в процессе работы, если Тдв при положительном значении стремится к "∞", а при отрицательном значении к "-∞" (т.е. к торможению перемещаемого средства, движущегося относительно основания электрической машине 2, когда данная машина переходит в режим генерации резонансных токов) ТГ - должно стремится к "0" (т.е. разгону ротора электрической машине 1, когда данная машина входит в режим электродвигателя). В целом, данный режим работы обеспечивает переход поступательного движения в крутящий момент (т.е. обратную передачу энергии с электрической машины 2 в электрическую машину 1). Одновременное функционирование блоков 1 и 2 с учетом указанных выше частот резонансных контуров и возможного изменения их индуктивных и емкостных свойств по заданной программе блоком 3 дает возможность использовать данную конструкцию для заданной передачи энергии от электрической машины 1 к электрической машине 2 или, наоборот, от электрической машины 2 к электрической машине 1 и преобразования движения одного вида в другой и обратно (из вращательного в прямолинейное или колебательное и, наоборот, из прямолинейного движения или колебательного во вращательное). Заданные параметры движения (скорость, ход и направление движения) электрической машины 2 не зависят от параметров скорости вращения ротора (частота и направление вращения) электрической машины 1 изготовления электрических обмоток электрических машин 1 и 2 в компактных объемах снижает массогабаритные показатели электрорезонансного привода.
При этом все параметры данного устройства могут находиться в заранее полученных расчетных пределах.
В данном устройстве блок 3 состоит из системы запуска, обеспечивающей возникновение генерации резонансного тока в электрической машине, системы ограничения электрического тока в рабочих обмотках электрических машин (электрогенераторе или электродвигателе) (превышение которого вызовет самопроизвольное перемещение полюсов магнитных систем в электрической машине 2 или электрической машине 1, при этом следствием превышения электрического тока является превышение расчетной механической нагрузки электрической машины 2).
Система синхронизации, которая входит в блок 3 формирования управляющих сигналов, обеспечивает заданную в этот момент времени скорость и направление движения движущейся магнитной системы относительно стационарной в электрической машине 2 и адаптации в случае изменения скорости и направления вращения движущейся магнитной системы ротора относительно стационарной в электрической машине 1 путем изменения тока, подаваемого на управляющие обмотки электрических машин 1 и 2.
Вследствие этого изменяются индуктивность рабочих обмоток магнитных систем блоков 1 и 2, что приводит к изменению частоты резонансных контуров с возможностью достижения состояния резонанса. Входящая в блок 3 система ограничения напряжения резонансного тока обеспечивает невозможность его превышения некоторого заданного значения, что не дает вызвать пробой изоляции рабочих обмоток и конденсаторов 20-23.
Таким образом, использование данного устройства позволяет снизить массогабаритные показатели и уменьшить потребляемую мощность.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНДУКТИВНЫЙ ДАТЧИК ПОЛОЖЕНИЯ РОТОРА БЕСКОЛЛЕКТОРНОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2176846C1 |
| Электротрансформатор для работы в резонансном режиме, а также в составе статора электрогенератора | 2021 |
|
RU2770049C1 |
| ПАЗОННЫЙ СПОСОБ МОДЕЛИРОВАНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2137286C1 |
| БЕСКОЛЛЕКТОРНАЯ УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 1998 |
|
RU2130682C1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2003 |
|
RU2303536C2 |
| ТРЕХФАЗНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1993 |
|
RU2088027C1 |
| БЕСКОЛЛЕКТОРНАЯ УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 2007 |
|
RU2320065C1 |
| Транспортное средство с гибридной силовой установкой | 2018 |
|
RU2701282C1 |
| УНИВЕРСАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА БЕЛАШОВА | 1996 |
|
RU2096898C1 |
| Вентильный электродвигатель | 1974 |
|
SU561257A1 |
Изобретение относится к электротехнике и может быть использовано в электротехническом машиностроении для создания электрических машин. Технический результат заключается в снижении массогабаритных показателей и уменьшении потребляемой мощности, а также расширении функциональных возможностей за счет управления одной из электрических машин независимо от скорости движения движущихся магнитных систем в другой машине, а также за счет передачи энергии от одной электрической машины к другой электрической машине. Электрорезонансный привод имеет первую электрическую машину, содержащую стационарные магнитные системы, размещенные на статоре, и движущиеся магнитные системы, расположенные на роторе. Вторая электрическая машина содержит стационарные магнитные системы, размещенные на основании и движущиеся магнитные системы, расположенные на перемещаемом относительно основания средстве. Выводы рабочих обмоток первых пар обмоток магнитопроводов стационарных и движущихся магнитных систем ротора первой электрической машины соединены с выводами встречно включенных рабочих обмоток движущихся магнитных систем второй электрической машины и выводами конденсаторов с возможностью образования резонансных контуров, функционирующих в режиме резонанса токов. Выводы рабочих обмоток вторых пар обмоток магнитопроводов стационарных и движущихся магнитных систем ротора первой электрической машины соединены с выводами соответствующих встречно включенных рабочих обмоток стационарных магнитных систем второй электрической машины и выводами дополнительных конденсаторов с возможностью образования резонансных контуров, функционирующих в режиме резонанса токов. Первые выводы управляющих обмоток стационарных и движущихся магнитных систем статора и ротора первой электрической машины, а также магнитопроводов стационарных и движущихся магнитных систем второй электрической машины подключены к выводам, по меньшей мере, одного блока формирования управляющих сигналов. 1 ил.
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ДВИГАТЕЛЬ | 1997 |
|
RU2158464C2 |
| РЕЗОНАНСНЫЙ ПРИВОД | 1999 |
|
RU2162791C2 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД РЕЗОНАНСНОГО ВИБРАТОРА | 1998 |
|
RU2146412C1 |
| Способ управления приводом резонансного манипулятора | 1988 |
|
SU1593946A1 |
| Фронтальный агрегат | 1984 |
|
SU1211413A1 |
| FR 2005057 A, 05.12.1969. | |||

