Техническое решение относится к сохранению скоростного воздушного объекта при его движении в зоне возможного поражения. Техническое решение может быть использовано для сохранения ракеты управляемой, боевого скоростного летательного аппарата в зоне боевых действий и других активных и пассивных средств движения в воздушной среде с наведением внешним или самонаведением скоростного объекта.
Техническое решение может быть также использовано в управлении скоростными боевыми кораблями в зоне боевых действий.
Известны способы, которые используют для устранения возможности поражения летательных аппаратов, которые способны развивать скорость в несколько скоростей звука. Поражение такого летательного объекта происходит после его обнаружения радиолокационными установками, вычисления параметров движения и запуска ракет по результатам расчета. Так был поражен У-2 в шестидесятых годах, причем на значительной высоте. В Балканском конфликте впервые были использованы в боевых условиях самолеты - невидимки (F117), которые имеют покрытие, поглощающее импульсы излучателей радиолакационных установок. Однако и такое покрытие не спасло от поражения такого летательного аппарата (в марте 1999 года такой самолет был сбит в Югославии). Ракеты, которые обладают повышенной скоростью, также сбиваются с использованием регистрации параметров движения, вычисления пара метров встречных ракет пусковых комплексов для обеспечения встречного курса перед столкновением. Такие случаи имели место в конфликте на Балканах в марте 1999 года, когда были уничтожены крылатые ракеты с использованием Российских ракетных комплексов.
Даже при использовании различных факторов сокрытия подвижного объекта нельзя избежать его регистрацию, определения параметров, вычисления параметров наземного комплекса для уничтожения объекта. При этом могут быть использованы различные регистрируемые параметры подвижного объекта, например факел и инверсия от реактивных двигателей или температура объекта.
Аналогично обстоит положение и в боевых операциях на море, когда осуществляют операции по обнаружении и уничтожении стратегических подводных лодок типа, "Комсомолец", "Тайфун" и аналогичные подводные ракетные подводные лодки (техническая часть по обнаружению, преследованию, регистрации параметров с помощью гидролокации очень подробно описаны в "Охоте за "Красным октябрем", Том Клэнси, издательство "Новости", 1992 год и отзыве отмечена техническая часть труда). Скорости подводных кораблей соизмеримы со скоростями торпед, поэтому техническое решение может быть эффективно использовано и при ведении боевых действий на море на уровне более низких скоростей. Ближайшим аналогом может служить любой самолет, обязательно имеющий поверхности управления положением летательного аппарата в пространстве, которые определяют и изменяют положение посредством углового перемещения указанных поверхностей от исполнительного механизма по команде оператора или в автоматическом режиме (от автопилота), когда заданный курс выдерживается в автоматическом режиме с учетом ветра, скорости и других параметров (ТУ -104, БОИНГ и любые другие скоростные летательные аппараты).
К недостаткам описанного способа управления можно отнести:
1. Легко определяемые параметры движения с возможностью поражения ракетным комплексом наземным.
2. В зоне боевых действий после регистрации объекта (в дальнейшем под объектом понимается и скоростной летательный аппарат и ракета) легко поражается, т. к. его траектория движения предсказуема и позволяет вычислить с упреждением точку встречи ракеты и объекта.
3. Встречная скорость объекта и ракеты, которая суммируется, столь велика, что при визуальном обнаружении встречной ракеты предпринять ничего нельзя, да и визуальное наблюдение маловероятно (при суммарной скорости, допустим 1000 м/с, что составляет около 3 скоростей звука, и с учетом реакции человека, срабатывания исполнительного механизма и начальной замедленной фазы отклонения от курса, потребуется в несколько раз более значимый отрезок времени и это будет усугубляться массой объекта, которая определяет его инерционность).
4. Если ракета самонаводящаяся, то положение еще более усугубляется, т. к. она на подлете к точке встречи может совершать маневр для обеспечения контакта.
Целью технического решения является устранение или, по крайней мере, снижение вероятности контакта ракеты комплекса с объектом. Технический результат достигается тем, что после совмещения траектории движения объекта с заданным перемещают поверхности управления исполнительным механизмом от соответствующих генераторов случайных чисел по времени воздействия и по углу поворота указанных поверхностей при ограничении значений случайных чисел техническими возможностями объекта, а после временных отрезков для каждой поверхности управления и выполнения поворота каждой поверхностью управления отключают генератор случайных чисел и совмещают по сигналу рассогласования движение объекта с заданным, и в момент совмещения с заданной траекторией снова вводят числовые значения от генератора случайных чисел и повторяют цикл при движении в зоне возможного поражения объекта.
Пояснение к способу:
Фактически происходит постоянное смещение траектории движения относительно расчетной и заданной. Такое смещение не позволяет провести расчет параметров движения ракеты для обеспечения точки встречи. Это объясняется тем, что за временной отрезок подлета ракеты к объекту последний несколько раз изменит свое положение в пространстве, причем такое изменение положения в пространстве не поддается вычислению, т.к. все перемещения осуществляют по параметрам числовым, которые вырабатывают генераторы случайных чисел. Ограничение числовых значений вызвано тем, что могут возникнуть нежелательные перегрузки на конструкцию и экипаж, если это летательный аппарат. Ракеты наземных (и других систем) не рассчитаны на отслеживание многократных перемещений в плоскости, перпендикулярной расчетной траектории движения ракеты, и всегда будет наблюдаться несоответствие отклонения объекта и ракеты из-за значительно большей скорости движения ракеты, что не позволит осуществить одинаковое смещение от расчетной траектории ракеты. Это также объясняется значительно большей энергией движения ракеты, т.к. масса входит только в первой степени, а скорость - во второй. Еще хуже обстоит с энергетическими параметрами ракеты, т.к. затраты на отклонения от расчетного курса по энергии приведут и потерям энергетическим и перегрузкам в конструкции ракеты.
Для пояснения возможности использования способа рассмотрим все основные процессы и их техническое обеспечение на простейшем примере и с простейшими техническими средствами.
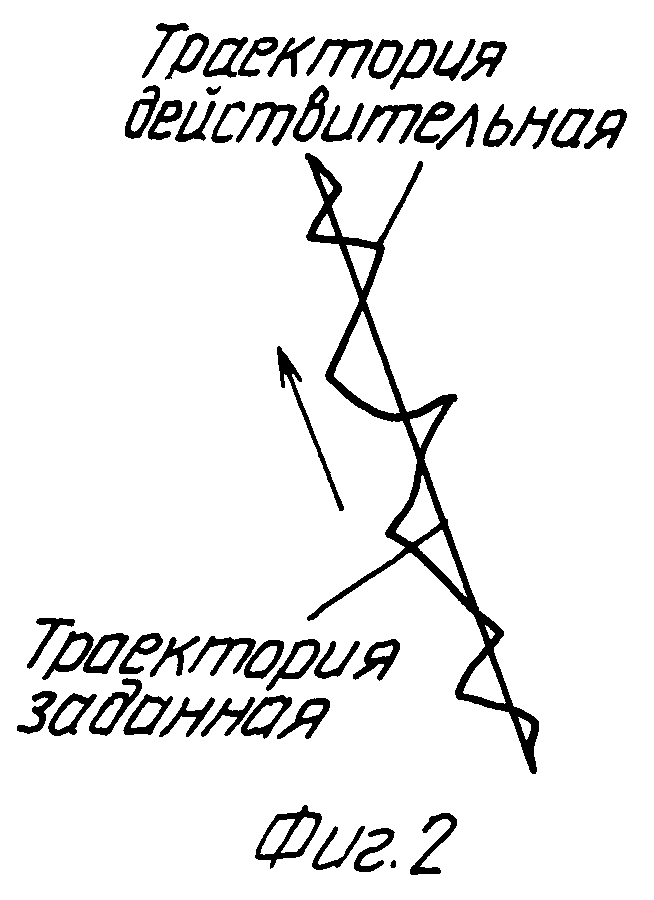
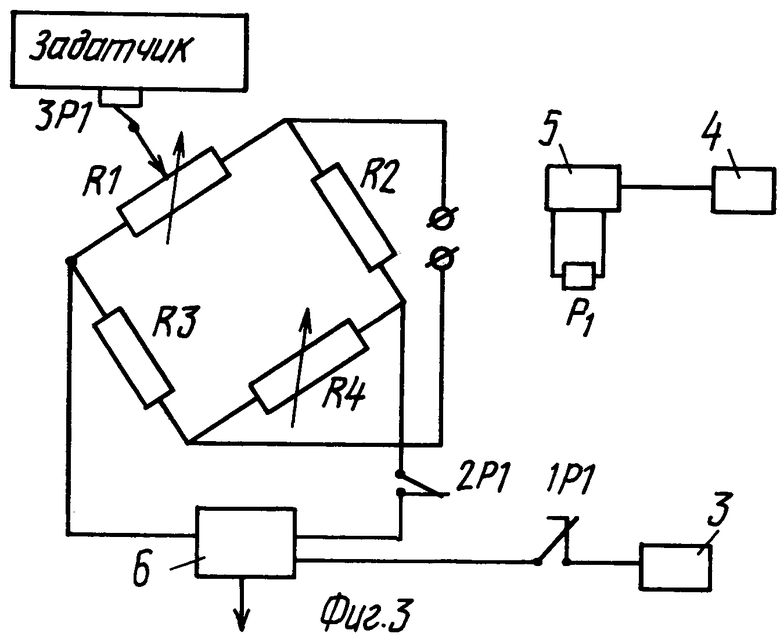
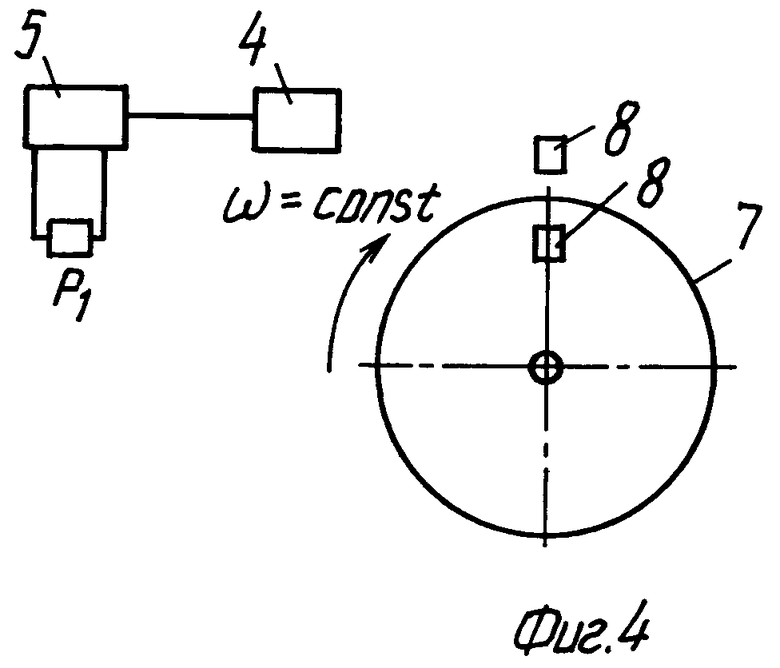
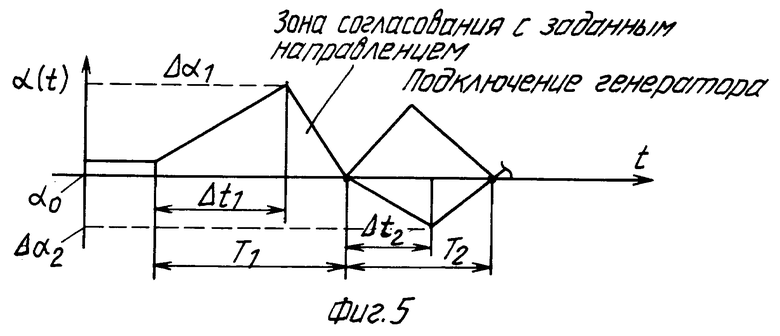
На чертежах представлены конструктивные схемы и структурная схема способа. На фиг. 1 представлен простейший задатчик расчетной траектории в виде магнитной стрелки, на фиг. 2 - расчетная траектория и действительная траектория движения объекта, на фиг. 3 - совмещенная структурная схема, на фиг. 4 - генератор случайных чисел, на фиг. 5 - графическое представление изменения одного параметра объекта во времени. Рассматриваем в качестве задатчика движения и траектории магнитную стрелку 1, которая соединена с подвижным контактом переменного сопротивления R1 моста. Естественно, что подвижный контакт 2 при исполнении конструктивном будет основан на отсчете угла бесконтактно, например с помощью фотопары, однако функционально этот элемент - подвижный контакт.
Угол αo- заданное направление движения объекта на отрезке или он связывает конечные пункты движения объекта. Углы Δα1,Δα2 являются отклонением от заданного угла движения и они получены от генератора случайных чисел 3. Одновременно генератор случайных чисел 4 задает временной отрезок выдержки объекта на отклонении от расчетной траектории. Генератор 4 соединен с реле времени 5, которое имеет реле P1 со своими контактами в эл. цепи для переключения на проведение операций. Электрический мост соединен одной диагональю с источником питания, а другой - с исполнительным механизмом 6. Генератор случайных чисел выполнен в виде барабана 7 с постоянной скоростью вращения и фотопары 8, которая может считывать число с прозрачного барабана 7. Действует управление одним параметром следующим образом:
При отсутствии опасности движение осуществляется с выдерживанием угла αo При движении объекта к зоне возможного поражения подключается система управления. Включаются генераторы 3, 4 и снимаются показания числовые фотопарой 8 на реле времени 5 и на числовое изменение угла от генератора 3, одновременно отключается задатчик, определяющий угол αo , подключается исполнительный механизм 6 к генератору 3. Это приводит к повороту поверхности управления на угол Δα1 и осуществление поворота в течение заданного времени Δt1 По истечении заданного отрезка времени реле времени 5 отключается и на переменное сопротивление R1 поступает сигнал рассогласования, т.к. переменное сопротивление R1 разбалансировало мост и на исполнительный механизм 6 поступает сигнал рассогласования и объект начинает разворачиваться, т.к. указанный сигнал вызвал перемещение поверхности управления. Как только объект займет заданное направление через отрезок времени Т1, снова включаются генераторы 3, 4 и отключаются задатчик и мост контактом 2P1, поступают случайные числа изменения угла на Δα2 и Δt2 - времени, в течение которого установленный угол должен выдерживаться. Второй период будет иметь временной отрезок T2. Случайное число может быть получено включением фотопары 8 в момент совпадения расчетной траектории с действительной: на графике это окончание периодов T1, T2. Характер движения объекта относительно заданной траектории будет выглядеть так, как показано на фиг. 2: колебания и отклонения от расчетной траектории будут компенсироваться по закону больших чисел, средняя траектория будет совпадать с расчетной, хотя это не играет особой роли. Представленная система позволяет дополнить пояснение к способу: 1. Представлена система изменения одного параметра в пространстве; угла в плоскости движения объекта. Однако положение в пространстве будет определяться и высотой над поверхностью земной. Там будут происходить такие же отклонения со своими случайными числами и временными отрезками. Возможно и изменение скорости движения так же по такому же алгоритму. В результате будет получено такое сложное движение в пространстве, которое не способен осуществить человек самой высокой летной квалификации. Отследить такое движение с помощью регистрации и исполнительными механизмами на ракете поражающего комплекса невозможно ни по использованию большого числа переменных параметров движения, ни по перемене положения объекта в пространстве, причем и во временной четвертой координате, которая связана с изменением скорости.
2. Рассмотрена прямолинейная траектория движения для простоты, однако угол αo может иметь место на отрезке траектории, а полная траектория может быть составлена из большого числа таких отрезков. Т.е. можно дистанционно задавать на каждом отрезке свой угол и осуществлять все действия со случайными числами по изменению параметров движения объекта. Такое наложенное движение в пространстве вообще создаст непреодолимые сложности для ракет комплекса уничтожения объекта, т.е. сделает объект неуязвимым для расчетных траекторий ракетных комплексов поражения цели и для самонаводящихся ракет.
3. Элементная база выбрана наипростейшая, однако существуют более совершенные задатчики, электронные системы рассогласования и все может быть объединено в бортовом компьютере. Навигационные приборы могут включать и спутники и системы наведения.
4. Для более сложной аппаратуры может быть вариант, когда все составляющие системы по всем возможным изменениям параметров и приборное обеспечение располагается на пункте управления, а на объект передаются только исполнительные команды в кодовом виде. Это позволит на множество объектов, которые перемещаются в зоне возможного поражения, иметь единую вычислительную часть и генератор случайных чисел или, по крайней мере, резко сократить число систем при усложнении траектории движения.
Таким образом, достигаются все поставленные цели, которые были сформулированы выше, а именно объект при его движении в зоне возможного поражения практически полностью устраняет такую возможность. При массовом использовании и централизованном управлении возможно получение результата при незначительных затратах (крылатая ракета стоит миллион долларов).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОРАЖЕНИЯ БОЕВОГО НАДВОДНОГО СУДНА | 1999 |
|
RU2160212C1 |
| СПОСОБ СНИЖЕНИЯ ВОЗМОЖНОСТИ ПОРАЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1998 |
|
RU2150663C1 |
| СПОСОБ ПОРАЖЕНИЯ БАЛЛИСТИЧЕСКОЙ РАКЕТЫ | 1999 |
|
RU2155316C1 |
| СПОСОБ ПОРАЖЕНИЯ СКОРОСТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2162997C1 |
| УСТАНОВКА ПОРАЖЕНИЯ РАСПРЕДЕЛЕННОЙ В ПРОСТРАНСТВЕ ЦЕЛИ | 1999 |
|
RU2162198C2 |
| СПОСОБ ПОРАЖЕНИЯ ОБЪЕКТА С ЛЕТАТЕЛЬНОГО АППАРАТА | 1997 |
|
RU2122513C1 |
| СПОСОБ ПОРАЖЕНИЯ ОБЪЕКТА С ЛЕТАТЕЛЬНОГО АППАРАТА | 1998 |
|
RU2143382C1 |
| ГОЛОВНАЯ ЧАСТЬ СНАРЯДА | 1999 |
|
RU2149344C1 |
| СПОСОБ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ ПОРАЖЕНИЯ ОБЪЕКТОВ ИЗ ЛЕТАТЕЛЬНОГО АППАРАТА | 1997 |
|
RU2130865C1 |
| СПОСОБ ПОРАЖЕНИЯ БАЛЛИСТИЧЕСКОЙ РАКЕТЫ | 1999 |
|
RU2162589C1 |
Изобретение относится к сохранению летательных аппаратов. Способ включает совмещение траектории движения в пространстве с заданной траекторией путем перемещения поверхностей управления исполнительными механизмами и взаимодействие указанных поверхностей с набегающим потоком окружающей среды. Затем перемещают поверхности управления исполнительными механизмами на величину перемещения и на время воздействия указанного перемещения на числовые значения от соответствующих генераторов случайных чисел при ограничении их числовых значений техническими возможностями объекта. После истечения временных отрезков для изменения каждого параметра отключают генератор случайных чисел и совмещают по сигналу рассогласования траекторию движения с заданной. В момент совмещения заданной траектории и существующей повторяют введение числовых параметров от генераторов случайных чисел и повторяют цикл при движении в зоне возможного поражения. Раскрытое изобретение позволит снизить вероятность поражения летательного аппарата. 5 ил.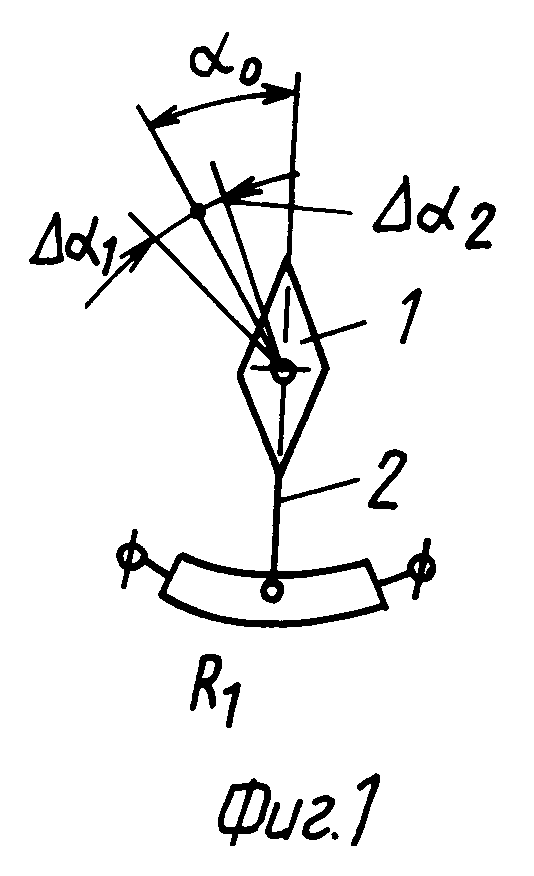
Способ управления скоростным воздушным объектом в зоне опасности поражения, включающий совмещение траектории движения в пространстве с заданной траекторией путем перемещения поверхностей управления исполнительными механизмами и взаимодействие указанных поверхностей с набегающим потоком окружающей среды, отличающийся тем, что после совмещения траектории движения объекта с заданной траекторией перемещают поверхности управления исполнительными механизмами на величину перемещения и на время воздействия указанного перемещения на числовые значения от соответствующих генераторов случайных чисел при ограничении их числовых значений техническими возможностями объекта, а после истечения временных отрезков для изменения каждого параметра отключают генератор случайных чисел и совмещают по сигналу рассогласования траекторию движения с заданной, в момент совмещения заданной траектории и существующей снова вводят числовые параметры от генераторов случайных чисел и повторяют цикл при движении в зоне возможного поражения.
| БОДНЕР В.А | |||
| Системы управления летательными аппаратами | |||
| - М.: Машиностроение, 1973, с.241,242 | |||
| СПОСОБ УМЕНЬШЕНИЯ ВЕРОЯТНОСТИ ПОРАЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА СРЕДСТВАМИ ПРОТИВОВОЗДУШНОЙ ОБОРОНЫ | 1995 |
|
RU2095737C1 |
