Изобретение относится к области туннельной и атомно-силовой микроскопии, а именно к устройствам, обеспечивающим градуировку сканирующего зондового микроскопа (СЗМ).
Известна тестовая структура для градуировки СЗМ [1], состоящая из монокристаллического основания с расположенными на нем микроструктурами с верхней горизонтальной поверхностью, обладающей четко заданными геометрическими параметрами. Такая структура позволяет проводить достаточно точную градуировку СЗМ в горизонтальной плоскости, однако наличие только одной разности высот между основанием и верхней поверхностью микроструктур не позволяет использовать ее для точной градуировки СЗМ в нормальном к основанию направлении. Действительно, для учета искажений, вносимых нелинейностью и гистерезисом отклоняющей механики в данные о высотах исследуемого рельефа, необходимо получить в процессе градуировки СЗМ как можно более детальную зависимость его показаний от перепадов высот на тестовой структуре. Такое требование явно не может быть удовлетворено с помощью тестовой структуры (ТС), описанной в [1] , так как она предполагает только одну контрольную точку, соответствующую разности высот между основанием и верхней горизонтальной поверхностью микроструктуры (МС).
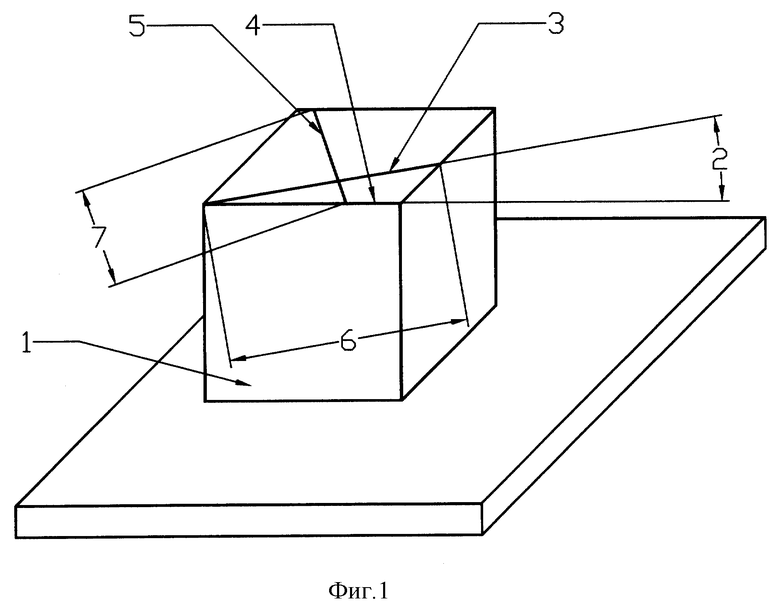
Необходимо отметить, что обычно сканирование поверхности с помощью СЗМ представляет собой быстрое смещение зонда в пределах границ сканирования вдоль одной из горизонтальных осей (быстрое направление сканирования) и одновременное медленное смещение зонда вдоль другой горизонтальной оси (медленное направление сканирования). Таким образом, получаемая информация о рельефе представляет собой группу профилей поверхности, покрывающих всю исследуемую площадку. Градуировка СЗМ заключается в сканировании с его помощью специальной ТС с известными геометрическими параметрами. В принципе, если точно задать угол между, например, быстрым направлением сканирования и ТС, то одного профиля может быть достаточно для градуировки СЗМ по этому направлению. Однако при каждой конкретной процедуре градуировки ориентацию тестовой структуры относительно направлений сканирования СЗМ трудно выдержать с достаточной точностью и обычно она является достаточно произвольной. Поэтому для проведения градуировки в горизонтальной плоскости необходимо провести подробное многопрофильное сканирование достаточно большой площади ТС так, чтобы в сосканированной площадке полностью помещалась хотя бы одна МС. Действительно, предположим (см. фиг. 1), что МС (1) представляют собой кубики. Обозначим как (2) угол между быстрым направлением сканирования (3) и направлением, заданным одной из граней (4) верхней поверхности МС. Проведем сканирование только по отрезку (3) и перпендикулярному ему (5), которые заданы соответственно быстрым и медленным направлениями сканирования. Так как угол (2) заранее неизвестен, то полученные в результате сканирования длины (6) и (7), определяемые соответственно пересечениями граней верхней поверхности МС с сосканированными отрезками (3) и (5), не могут позволить определить длину грани МС (4), и значит сканирование всего двух отрезков (3) и (5) не дает возможности отградуировать СЗМ. Для градуировки необходимо провести большое количество проходов сканирования по отрезкам, параллельным (3) так, чтобы восстановить вид всей верхней поверхности МС. Из этого вида можно получить длину грани (4) в относительных единицах и, так как эта длина в абсолютных единицах задана при изготовлении ТС, отградуировать СЗМ. Сам процесс такого многопроходного сканирования занимает относительно небольшое время (порядка нескольких секунд), однако математическая обработка такого большого объема данных и восстановление рельефа поверхности требует нескольких десятков минут, что является определенным неудобством особенно при промышленном применении СЗМ.
Наиболее близкой к заявляемой по технической сущности и достигаемому результату является тестовая структура [2], состоящая из основания и расположенных на нем выступающих микроструктур, имеющих одинаковые противоположные боковые поверхности с заданными геометрическими параметрами. Указанные боковые поверхности имеют микрорельеф, имеющий, в частности, в перпендикулярном к основанию сечении пилообразную форму с треугольными зубцами. Данная ТС позволяет проводить градуировку СЗМ в нормальном к основанию направлении, однако в связи с тем, что микрорельеф боковых поверхностей не имеет участков, параллельных основанию ТС, точность такой градуировки будет низка. Кроме того, как будет показано ниже, из-за отсутствия таких параллельных основанию участков процедура быстрой градуировки в горизонтальной плоскости с помощью предложенной в [2] ТС требует сканирования в условиях, когда искомый коэффициент масштабирования по горизонтальной оси не зависит от отклонения иглы СЗМ от основания ТС, что на практике является невыполнимым требованием.
Цель изобретения - создание ТС для СЗМ, повышающей точность градуировки СЗМ по нормальной к основанию оси, а также позволяющей проводить градуировку СЗМ в горизонтальной плоскости в кратчайшее время за счет сканирования не всей площади, занимаемой МС на основании ТС, а лишь двух отрезков, параллельных соответственно быстрому и медленному направлениям сканирования, в условиях, когда искомый коэффициент масштабирования по горизонтальной оси зависит от отклонения иглы СЗМ от основания ТС.
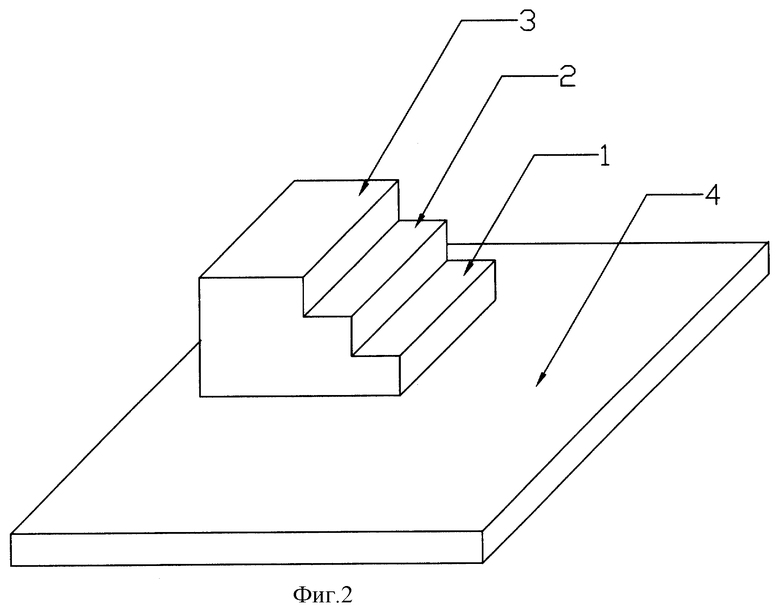
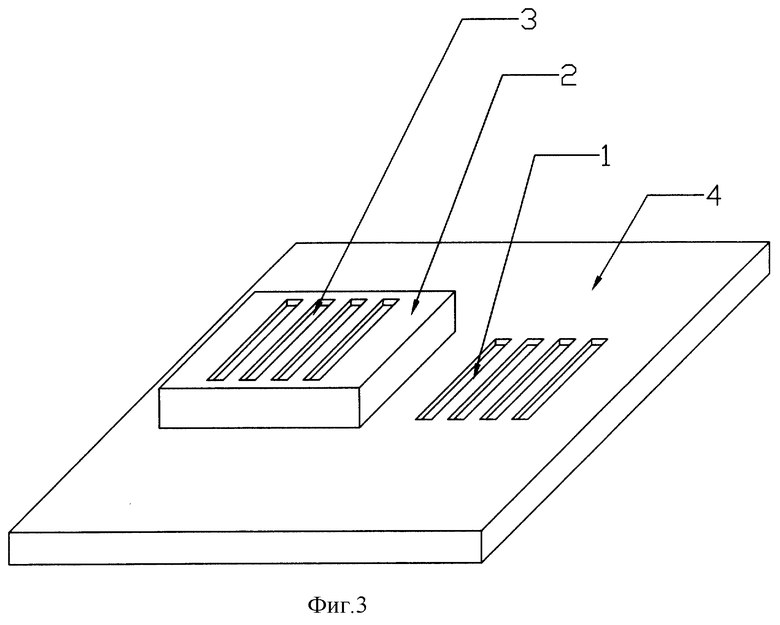
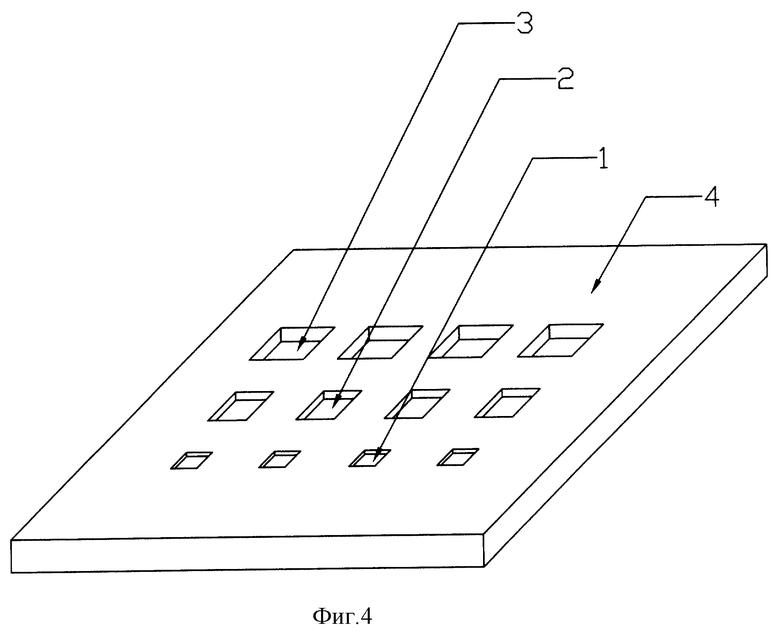
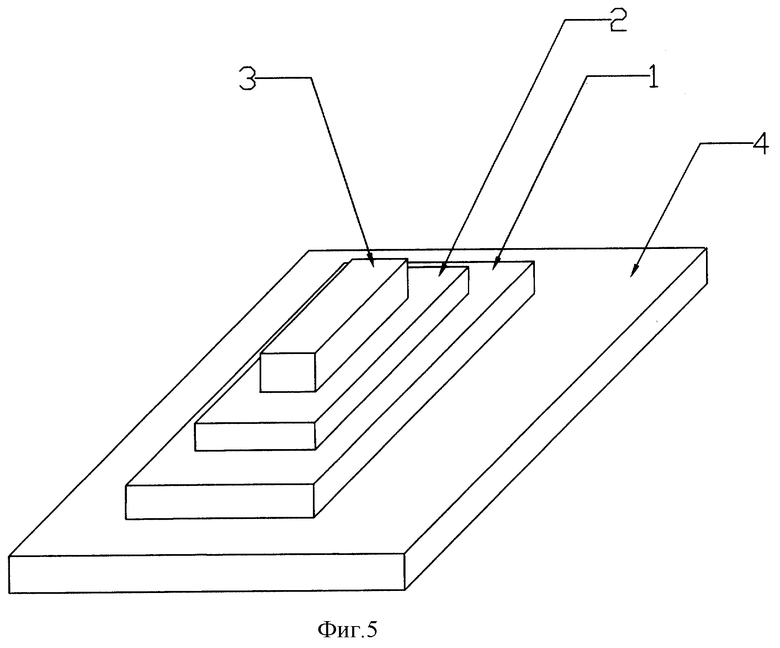
Это достигается тем, что в качестве ТС для градуировки СЗМ используют ТС, состоящую из основания и расположенных на нем МС, имеющих два или более параллельных основанию ТС участка, находящихся на разных точно определенных при изготовлении расстояниях от основания ТС. На фиг. 2-6 изображены некоторые из возможных вариантов предлагаемых МС. Вся же предлагаемая ТС представляет собой упорядоченную совокупность таких МС, расположенных на одном основании. Цифрами (1), (2) и (3) на фиг. 2-6 обозначены участки с различными заданными при изготовлении расстояниями от основания (4) ТС.
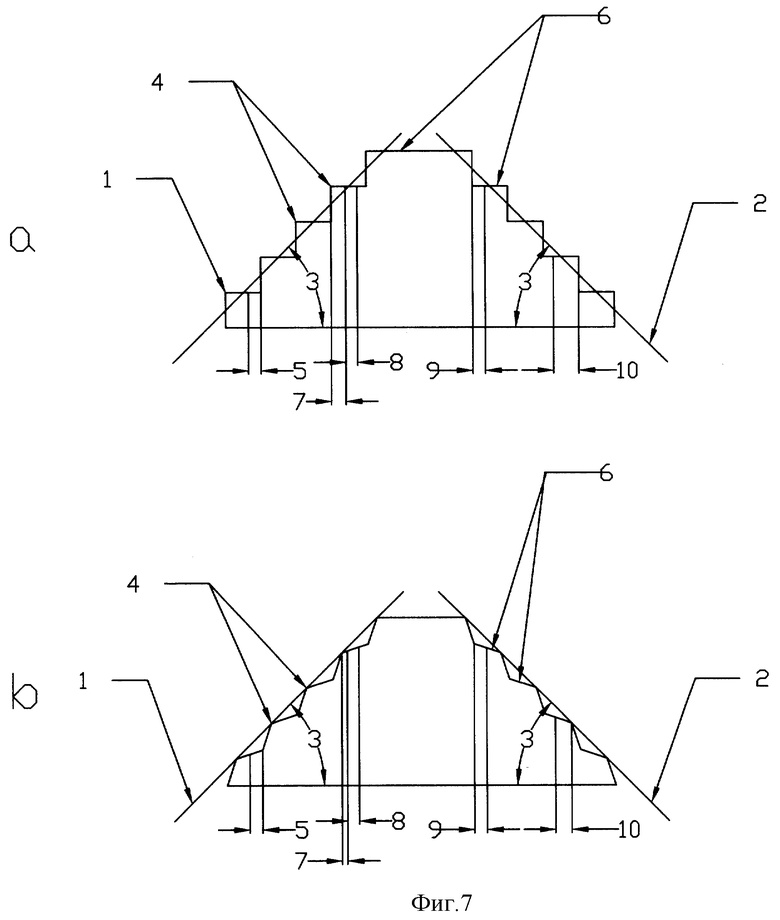
При использовании предлагаемых ТС становится возможным повышение точности градуировки СЗМ в нормальном к основанию направлении. Наиболее подходящим для такой градуировки типом МС является набор "ступенек" (см. фиг. 7), плоскости которых (1) и (2) лежат под углом β (3) к основанию ТС. Угол β при этом имеет значение 0 < β < π/2, т.к. при прочих его значениях игла СЗМ не попадает при сканировании на все "ступеньки".
На фиг. 7a изображен характерный профиль предлагаемой МС, а на фиг. 7b изображен характерный профиль МС из патента [2], в котором микрорельеф боковых граней представляет собой равнобедренные треугольники.
Предположим, что сканирование идет слева направо, то есть сначала игла СЗМ проходит, поднимаясь, "ступеньки", расположенные вдоль линии (1), а затем, спускаясь к уровню основания ТС, расположенные вдоль линии (2). При подходе слева иглы к ребрам (4), сигнал, получаемый с нее, искажается в связи с тем, что в контакт с МС вступает боковая поверхность иглы, имеющая, вообще говоря, случайную форму. Вследствие этого получаемое с СЗМ изображение участка (5) не может быть использовано для градуировки. При дальнейшем сканировании для прохождения ребра (4) отклоняющий элемент (ОЭ), изготовленный, например, из пьезокерамики, смещает весь кантилевер вдоль нормальной оси, однако практически любой ОЭ элемент имеет гистерезис.
Рассмотрим как проявляет себя явление гистерезиса в отклоняющей механике СЗМ. Известно, что любое изменение входного напряжения на ОЭ не сразу, а с некоторой задержкой приводит к изменению механических параметров отклоняющей системы. При использовании МС, изображенной на фиг. 7a, сканирование вдоль параллельных основанию граней (6) не требует изменения напряжения на ОЭ, обеспечивающем нормальное отклонение иглы. В то время как сканирование вдоль наклонных по отношению к основанию граней (6) МС, изображенной на фиг. 7b, требует постоянного изменения напряжения на ОЭ, что может привести к неточности передачи рельефа поверхности; однако такие возможные неточности невелики пока рельеф представляет собой плоскость и производная по времени значения напряжения на ОЭ равна константе. Указанные неточности передачи рельефа, связанные с гистерезисом ОЭ, становятся значительными, если рельеф имеет кривизну и производная становится зависящей от времени, как например при прохождении ребер (4). Здесь можно отметить, что возможно существенное искажение в передаче рельефа и при сканировании наклонных участков (6) МС, изображенной на фиг. 7b, в случае, если имеет место существенная нелинейность градуировочного коэффициента масштабирования по горизонтальной оси. Грубой иллюстрацией такого случая является маятник, скорость движения которого различна в разных участках траектории. В этом случае вместо линейного по времени изменения напряжения на ОЭ имеет место нелинейное, связанное с изменением скорости сканирования, что приводит к появлению гистерезиса. При сканировании параллельных основанию участков (6) МС, изображенной на фиг. 7a, в аналогичных условиях гистерезиса в ОЭ, отвечающем за перемещение иглы вдоль нормальной оси, не наблюдается.
Итак, участки (7) также не позволяют проводить градуировку в связи с явлением гистерезиса при подъеме со "ступеньки" на "ступеньку". Таким образом, при подъеме для градуировки доступны только неискаженные участки (8), однако место их расположения на "ступеньках" (6) не известно, в связи с чем при использовании МС, изображенной на фиг. 7b, неизвестна их высота от основания ТС, что приводит к невозможности градуировки по нормальной оси. При использовании же МС, изображенной на фиг. 7a, такая градуировка, очевидно, возможна, так как вся "ступенька" (6), включая рабочий отрезок (8), имеет одинаковую высоту.
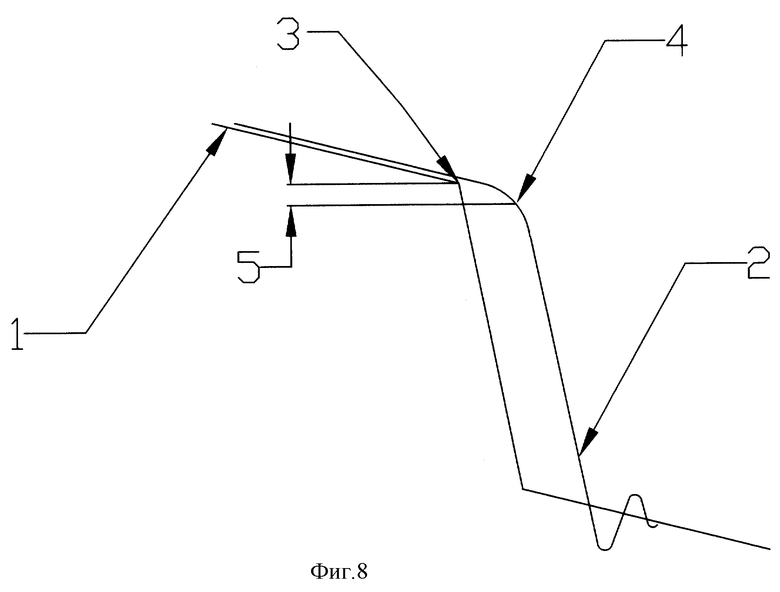
При сканировании "спуска " вдоль линии (2) по причине наличия гистерезиса ОЭ, аналогичного описанному выше, не подходит для градуировки область (9), однако и сканирование рабочей области (10) не даст достаточно информации для проведения градуировки в случае использования МС, изображенной на фиг. 7b. Действительно, для градуировки по нормальной оси с помощью этой МС необходимо точно знать место расположения на полученном рельефе ребра (6), высота над основанием которого известна и является одним из заданных параметров ТС. Однако после прохождения ребра (6) из-за гистерезиса ОЭ игла некоторое время сохраняет предшествующее направление и скорость движения по нормальной оси. Фиг. 8 иллюстрирует прохождение иглой СЗМ грани "ступеньки" ТС в направлении "спуска". Линия (1) обозначает рельеф МС. Линия (2) - траекторию движения иглы СЗМ. Видно, что вместо реального расположения грани (3) анализ движения иглы, не учитывающий гистерезис, даст точку (4), что приведет к ошибке (5) в градуировке СЗМ по нормальной к основанию ТС оси. Как было указано выше, градуировка с помощью МС, изображенной на фиг. 7a, не требует определения по траектории движения иглы СЗМ места расположения ребер "ступенек" ТС и, значит, позволяет не только повысить точность градуировки СЗМ в нормальном направлении при сканировании группы "нисходящих" "ступенек" МС, но и проводить такую градуировку при сканировании группы "восходящих" "ступенек".
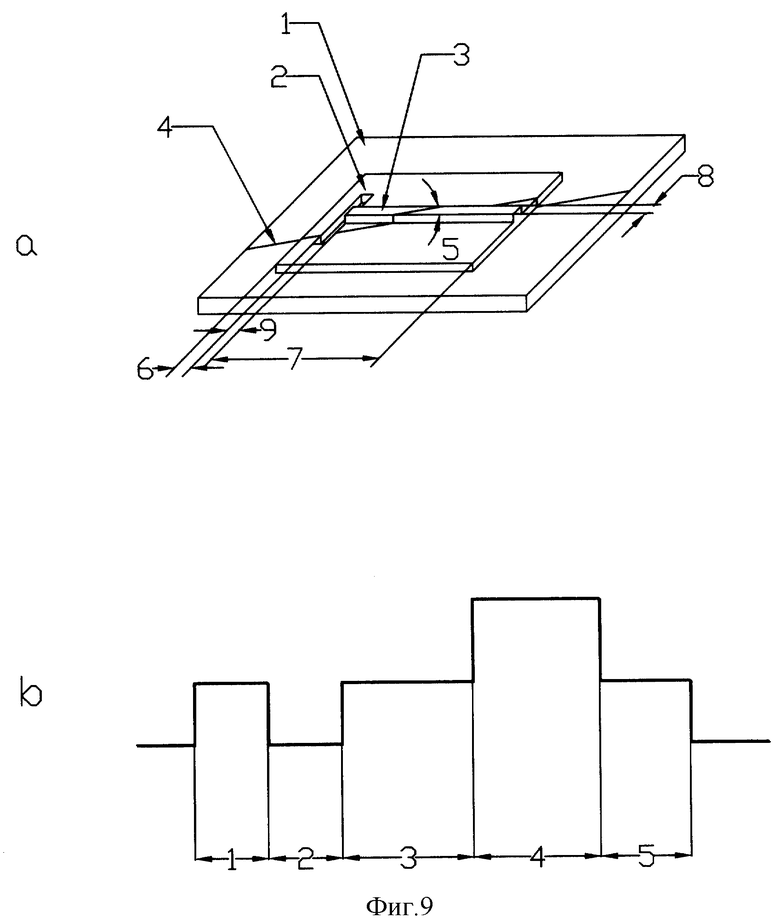
Опишем процедуру быстрой градуировки по быстрому и медленному направлениям сканирования. На фиг. 9a приведен вариант МС с двумя параллельными основанию (1) участками (2) и (3), находящимися на разных расстояниях от основания. Покажем, что ТС, состоящая из таких МС, позволяет проводить градуировку СЗМ в горизонтальном направлении на одном проходе сканирования в условиях, когда искомый коэффициент масштабирования по горизонтальной оси зависит от отклонения иглы СЗМ от основания ТС. Цифрой (4) на фиг. 9a обозначена траектория движения иглы СЗМ, а цифрой (5) - угол α между этой траекторией и выделенным направлением, заданным ориентацией ТС. Данная МС имеет несколько заданных размеров (6), (7), (8) и (9), которые в дальнейшем будем обозначать как соответственно a, b, c и d. На фиг. 9b показан сигнал, получаемый в результате сканирования по вышеуказанной траектории. Вообще говоря, описанное выше явление гистерезиса будет влиять на форму этого сигнала вблизи перепадов высот, однако этим влиянием можно пренебречь в связи с тем, что в дальнейших выкладках мы будем использовать длины отрезков траектории, не ставя перед собой задачи выяснить их точное положение на ТС. Действительно, в таком случае достаточно считать, что отрезок ограничен одинаковыми характерными точками, такими как, например, точка (4) на фиг. 8, с обоих концов. При этом систематическое отклонение точки (4) от точки (5) на фиг. 8, которое присутствует и в конце отрезка и в его начале, не влияет на полученную длину отрезка.
Необходимо отметить, что существуют два требования к траектории движения иглы СЗМ, разделяющие траектории на пригодные и непригодные к проведению процедуры быстрой градуировки (далее будем называть их соответственно рабочие и нерабочие траектории). Во-первых, траектория должна пересечь МС так, чтобы была известна проекция расстояния между входной и выходной точкой хотя бы на одну прямую, параллельную основанию, например ось X. Во-вторых, траектория должна так пересечь некий участок МС с некоторой выделенной высотой от основания, чтобы была известна проекция отрезка траектории, лежащего на этом участке, на другую прямую, параллельную основанию, но перпендикулярную первой прямой, например ось Y. Данные условия обычно легко выполнимы на практике, так как требуют ориентации ТС на столике СЗМ с точностью до нескольких десятков градусов, а такая ошибка в ориентации обнаружима даже визуально.
Цифрами (1), (2), (3), (4) и (5) на фиг. 9b обозначены длины отрезков траектории, на которых отклонение иглы СЗМ в нормальном направлении было постоянным. В дальнейшем мы будем обозначать эти длины как соответственно l1, l2, l3, l4 и l5. Значения этих длин получены в результате сканирования в некоторых приборных единицах. Найти коэффициент масштабирования для перевода их значений в системные единицы длины и есть задача процесса градуировки. Еще раз надо отметить, что эти коэффициенты в общем случае зависят от отклонения иглы СЗМ в нормальном направлении и, значит, для МС, изображенной на фиг. 9a, нам необходимо ввести три коэффициента масштабирования: k1 для уровня основания и длины l2; k2 для длин l1, l3, и l5; k5 для длины l4. Запишем систему уравнений, связывающих все вышеприведенные величины: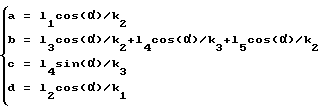
a - длина грани (6) МС (см. фиг. 9a);
l1 - расстояние (1) прохода через первый участок МС с фиксированным расстоянием от основания (см. фиг. 9b);
α - угол (5) между траекторией (4) движения иглы СЗМ и выделенным направлением, заданным ориентацией ТС (см. фиг. 9a);
k2 - коэффициент масштабирования при нормальном отклонении иглы СЗМ, равном высоте участка (2) МС (см. фиг. 9a);
b - длина грани (7) МС (см. фиг. 9a);
l3 - расстояние (3) прохода через третий участок МС с фиксированным расстоянием от основания (см. фиг. 9b);
l4 - расстояние (4) прохода через четвертый участок МС с фиксированным расстоянием от основания (см. фиг. 9b);
k3 - коэффициент масштабирования при нормальном отклонении иглы СЗМ, равном высоте участка (3) МС (см. фиг. 9a);
l5 - расстояние (5) прохода через пятый участок МС с фиксированным расстоянием от основания (см. фиг. 9b);
c - длина грани (8) МС (см. фиг. 9a);
d - длина грани (9) МС (см. фиг. 9a);
l2 - расстояние (2) прохода через первый участок МС с фиксированным расстоянием от основания (см. фиг. 9b);
k1 - коэффициент масштабирования при нормальном отклонении иглы СЗМ, равном высоте основания (1) ТС (см. фиг. 9a).
Откуда для коэффициентов масштабирования и угла α получим следующие выражения: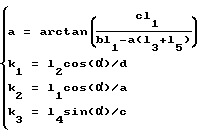
α - угол (5) между траекторией (4) движения иглы СЗМ и выделенным направлением, заданным ориентацией ТС (см. фиг. 9a);
c - длина грани (8) МС (см. фиг. 9a);
l1 - расстояние (1) прохода через первый участок МС с фиксированным расстоянием от основания (см. фиг. 9b);
b - длина грани (7) МС (см. фиг. 9a);
a - длина грани (6) МС (см. фиг. 9a);
l3 - расстояние (3) прохода через третий участок МС с фиксированным расстоянием от основания (см. фиг. 9b);
l5 - расстояние (5) прохода через пятый участок МС с фиксированным расстоянием от основания (см. фиг. 9b);
k1 - коэффициент масштабирования при нормальном отклонении иглы СЗМ, равном высоте основания (1) ТС (см. фиг. 9a);
l2 - расстояние (2) прохода через первый участок МС с фиксированным расстоянием от основания (см. фиг. 9b);
d - длина грани (9) МС (см. фиг. 9a);
k2 - коэффициент масштабирования при нормальном отклонении иглы СЗМ, равном высоте участка (2) МС (см. фиг. 9a);
k3 - коэффициент масштабирования при нормальном отклонении иглы СЗМ, равном высоте участка (3) МС (см. фиг. 9a);
l4 - расстояние (4) прохода через четвертый участок МС с фиксированным расстоянием от основания (см. фиг. 9b).
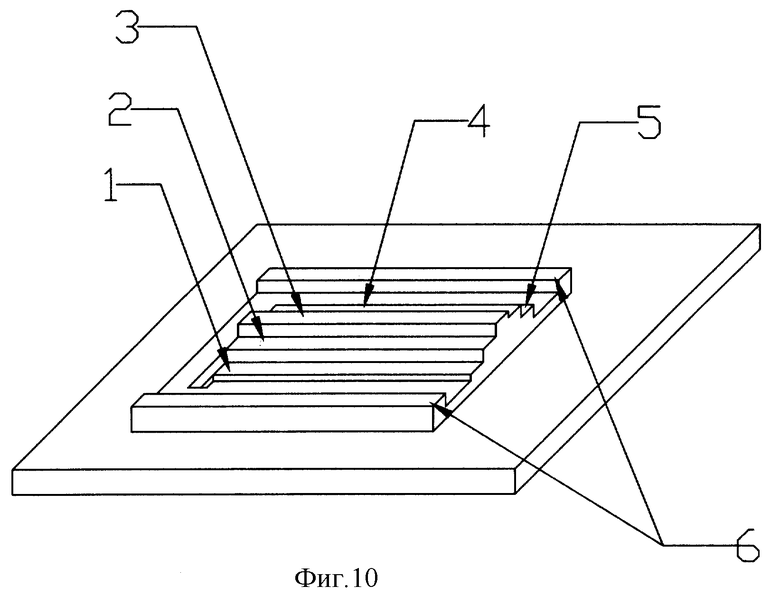
Таким образом, мы получили все коэффициенты масштабирования для данной МС. При этом полученные выражения так просты, что представляется возможным проводить такую градуировку в автоматическом режиме в реальном времени. Если необходимо измерить коэффициенты масштабирования для большего количества высот, то можно усложнить МС, включив в нее дополнительные участки, параллельные основанию ТС и лежащие на разном расстоянии от него, как например изображено на фиг. 10. Если в МС, изображенной на фиг. 9a, присутствует всего одна "ступенька", обозначенная как (3), то МС, изображенная на фиг. 10, включает в себя уже пять "ступенек", обозначенных цифрами (1), (2), (3), (4) и (5). Вообще при наличии (n-4) "ступенек" в МС, аналогичной изображенной на фиг. 10, система уравнений, аналогичная вышеприведенной для структуры с одной "ступенькой", будет содержать (n-1) уравнение и (n-1) неизвестную и запишется следующим образом: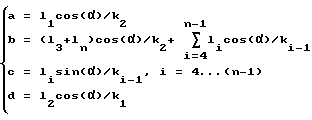
a - длина грани многоступенчатой МС, аналогичной грани (6) (см. фиг. 9a);
l1 - расстояние прохода через первый участок многоступенчатой МС с фиксированным расстоянием от основания, аналогичное расстоянию (1) (см. фиг. 9b);
α - угол между траекторией движения иглы СЗМ через многоступенчатую МС и выделенным направлением, заданным ориентацией ТС, аналогичный углу (8) (см. фиг. 9a);
k2 - коэффициент масштабирования при нормальном отклонении иглы СЗМ, равном высоте участка многоступенчатой МС, аналогичного участку (2) (см. фиг. 9a);
b - длина грани многоступенчатой МС, аналогичной грани (7) (см. фиг. 9a);
l3 - расстояние прохода через участок многоступенчатой МС с фиксированным расстоянием от основания, аналогичное расстоянию (3) (см. фиг. 9b);
ln - расстояние прохода через последний участок многоступенчатой МС с фиксированным расстоянием от основания, аналогичное расстоянию (5) (см. фиг. 9b);
n - число на четыре большее, чем число "ступенек" в многоступенчатой МС;
i - индекс, принимающий значение от 4 до (n-1) включительно;
li - расстояние прохода через участок с номером (i-1) многоступенчатой МС с фиксированным расстоянием от основания, аналогичное расстоянию (4) (см. фиг. 9b), которое соответствует участку (3) МС (см. фиг. 9a);
ki-1 - коэффициент масштабирования при нормальном отклонении иглы СЗМ, равном высоте участка с номером (i-1) многоступенчатой МС, аналогичного участку (3) (см. фиг. 9a);
c - длина грани многоступенчатой МС, аналогичная длине грани (8) (см. фиг. 9a);
d - длина грани многоступенчатой МС, аналогичная длине грани (9) (см. фиг. 9a);
l2 - расстояние прохода через участок многоступенчатой МС с фиксированным расстоянием от основания, аналогичное расстоянию (2) (см. фиг. 9b);
k1 - коэффициент масштабирования при нормальном отклонении иглы СЗМ, равном высоте основания (1) ТС (см. фиг. 9a).
Решение такой системы уравнений очевидно также возможно в автоматическом режиме в реальном времени.
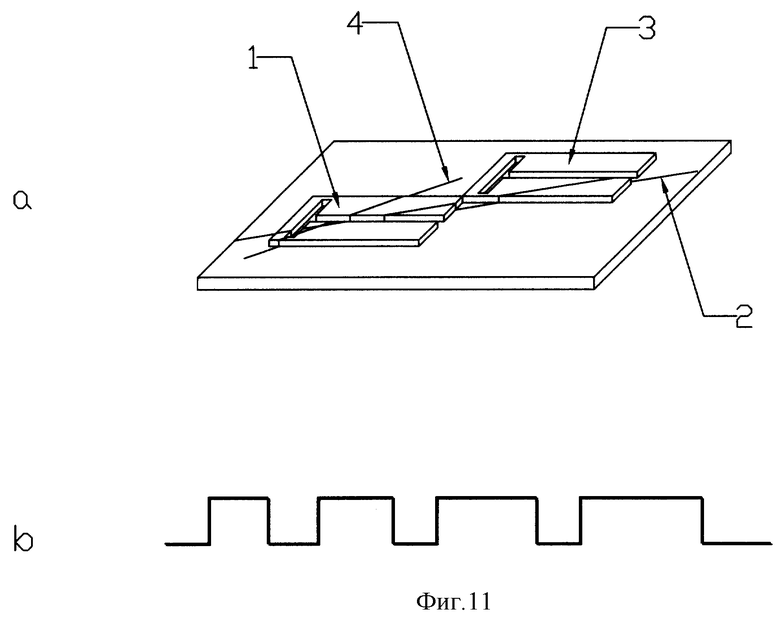
Рассмотрим, кроме того, вопрос почему МС, изображенная на фиг. 9a, должна иметь хотя бы два параллельных основанию участка, расположенных на разном расстоянии от основания. Казалось бы, если не ставить целью нахождение зависимости коэффициента масштабирования в горизонтальном направлении от нормального отклонения иглы СЗМ, то МС (1), изображенная на фиг. 11a, аналогичная МС, изображенной на фиг. 9a, но имеющая всего один параллельный основанию ТС участок, позволяет повести быструю градуировку в горизонтальном направлении. Однако в случае применения МС, изображенной на фиг. 11a, становится тяжело разделить участки траектории (2), относящиеся к МС (1) и МС (3). Действительно, ведь все МС должны иметь одинаковые параметры, в том числе и высоту от основания ТС, так как рабочее поле СЗМ ограничено и нельзя сказать, какие именно МС попали в него. Казалось бы, сигнал от двух соседних МС, полученный при сканировании по траектории (2), изображенный на фиг. 11b, можно разделить, если они будут лежать друг от друга на расстоянии большем, чем максимальный размер МС; но мало того, что такое решение приведет к неоправданному расходу площади ТС, ситуация осложнена тем, что в полученном при сканировании сигнале длины отрезков зависят от нормального отклонения иглы и короткие участки МС могут, например, давать более протяженный сигнал, чем длинные расположенные между микроструктурами участки, соответствующие основанию ТС. Также можно отметить, что в случае применения МС, изображенной на фиг. 11a, становится сложной задачей различение рабочей траектории сканирования (2) и нерабочей (4), в то время как применение МС, аналогичной изображенной на фиг. 10 с боковыми участками (6), позволяет легко отделить рабочие и непригодные для вышеописанного процесса градуировки траекторий иглы. Решение вышеуказанных проблем становится особенно сложным в автоматическом режиме в реальном времени.
Все предыдущие выкладки базировались на том, что в пределах одной "ступеньки" игла СЗМ не испытывает отклонения в нормальном к основанию направлении, а значит коэффициент масштабирования является константой. Если же верхние грани "ступеней" будут не параллельны основанию, то, в связи с тем, что зависимость коэффициента масштабирования по горизонтальному направлению сканирования от нормального отклонения иглы СЗМ заранее неизвестна и, по сути, ее нахождение и является задачей процесса градуировки, вывод уравнений, аналогичных приведенным выше, невозможен. Таким образом, только применение МС с двумя и более параллельными основанию ТС участками, находящимися на разных расстояниях от основания, позволяет проводить градуировку СЗМ в горизонтальном направлении в условиях существенной зависимости коэффициента масштабирования в горизонтальном направлении от нормального отклонения иглы СЗМ от основания ТС.
Подобным же образом проводится градуировка СЗМ в перпендикулярном направлении. Для этого необходимо лишь, чтобы в ТС присутствовала МС, аналогичная описанной, но повернутая относительно первой на угол π/2. Однако можно отметить, что при вышеописанном сканировании разделение в полученном рельефе поверхности МС, предназначенных для градуировки по быстрому и медленному направлениям может оказаться затруднительным, поэтому высоты участков, служащих для градуировки в этих двух видах МС, не должны совпадать.
Можно отметить, что градуировка СЗМ с помощью предложенных ТС возможна в полностью автоматическом режиме. Действительно, распознавание образа МС на изображении целой площадки, полученном в результате традиционного процесса градуировки, является достаточно сложной математической задачей и имеет существенную погрешность; в то время как автоматическая обработка профиля, аналогичного фиг. 9b, и получение с помощью вышеприведенных формул коэффициентов масштабирования не представляет собой существенного затруднения.
Таким образом, с помощью предлагаемых ТС становится возможной быстрая градуировка СЗМ по любому направлению сканирования в условиях существенной зависимости коэффициента масштабирования в горизонтальном направлении от нормального отклонения иглы СЗМ от основания ТС. Для широкого круга задач, решаемых с помощью СЗМ, таких, например, как контроль над гладкостью поверхности или за размерами элементов микросхем, вполне достаточно провести сканирование не целой площадки, а лишь отдельного отрезка на исследуемой поверхности. Такие измерения могут проводиться упрощенным вариантом СЗМ, имеющим отклоняющую пьезокерамику только для одной горизонтальной оси. Такой прибор дешевле и точнее обычного СЗМ с двумя направлениями сканирования в силу отсутствия дополнительной пьезокерамики, вносящей нелинейные искажения в результаты. Прежде невозможность использования упрощенных СЗМ обусловливалась трудностью их градуировки. Использование предлагаемых ТС снимает эту проблему, кроме того, низкая длительность градуировки и возможность полной ее автоматизации открывают широкие возможности для использования таких упрощенных СЗМ в промышленности.
Список иллюстраций
Фиг. 1. Демонстрация невозможности быстрой градуировки с использованием существующих тестовых структур с одним участком с заданным расстоянием от основания.
Фиг. 2-6. Различные варианты предлагаемых микроструктур для тестовой структуры, имеющих по три параллельных основанию участка, находящихся на разных расстояниях от основания.
Фиг. 7. Демонстрация процедуры градуировки по нормальной к основанию тестовой структуры оси:
a) характерный профиль предлагаемой микроструктуры;
b) характерный профиль микроструктуры, представленной в патенте RU N2121656.
Фиг. 8. Прохождение иглой СЗМ грани "ступеньки" тестовой структуры в направлении "спуска".
Фиг. 9. Демонстрация способа быстрой градуировки с использованием предлагаемой тестовой структуры:
a) микроструктура, имеющая два параллельных основанию участка, находящихся на разных расстояниях от основания, и ее быстрое сканирование;
b) профиль микроструктуры, полученный в результате быстрого сканирования.
Фиг. 10. Микроструктура, имеющая пять параллельных основанию участков, находящихся на разных расстояниях от основания, и имеющая боковые участки для разделения рабочих и непригодных для процесса быстрой градуировки траекторий иглы.
Фиг. 11. Демонстрация невозможности быстрой градуировки с использованием тестовой структуры, аналогичной предложенной, но лишь с одним участком с заданным расстоянием от основания:
a) микроструктура, имеющая один параллельный основанию участок с заданным расстоянием от основания, и ее быстрое сканирование;
b) профиль микроструктуры, полученный в результате быстрого сканирования.
Источники информации
1. Патент ЕПВ N 0676614, кл. G 01 В 1/00, 1995.
2. Патент RU N 2121656, кл. G 01 В 15/00, 1997.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАНТИЛЕВЕР ДЛЯ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 1999 |
|
RU2161344C1 |
| КАНТИЛЕВЕР ДЛЯ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 1999 |
|
RU2153731C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ КОМПОЗИТНЫХ КАНТИЛЕВЕРОВ ДЛЯ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 2004 |
|
RU2340963C2 |
| МОНОКРИСТАЛЛИЧЕСКИЙ КРЕМНИЕВЫЙ РЕЖУЩИЙ ИНСТРУМЕНТ (ВАРИАНТЫ) | 2000 |
|
RU2194464C2 |
| КАНТИЛЕВЕР С КРЕМНЕВОЙ ИГЛОЙ КОМПЛЕКСНОЙ ФОРМЫ | 2020 |
|
RU2759415C1 |
| ТЕСТОВАЯ СТРУКТУРА ДЛЯ ГРАДУИРОВКИ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 1997 |
|
RU2121656C1 |
| ТЕСТОВАЯ СТРУКТУРА ДЛЯ ГРАДУИРОВКИ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 2003 |
|
RU2244254C2 |
| ТЕСТОВАЯ СТРУКТУРА ДЛЯ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ РАЗМЕРОВ ОСТРИЯ ИГЛЫ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 2006 |
|
RU2308414C1 |
| ЭПИРЕТИНАЛЬНЫЙ ИМПЛАНТАТ | 2004 |
|
RU2282420C2 |
| ТЕСТОВАЯ СТРУКТУРА ДЛЯ ГРАДУИРОВКИ СКАНИРУЮЩИХ ЗОНДОВЫХ МИКРОСКОПОВ | 2009 |
|
RU2402021C1 |

Изобретение относится к области туннельной и атомно-силовой микроскопии, а именно к устройствам, обеспечивающим градуировку сканирующего зондового микроскопа. Предлагается тестовая структура для градуировки сканирующего зондового микроскопа, состоящая из снования и расположенных на нем микроструктур. Микроструктуры имеют два или более параллельных основанию участка. Участки находятся на разных расстояниях от основания. Структура обеспечивает градуировку сканирующего зондового микроскопа не только в горизонтальной плоскости, но и по нормальной к основанию оси, а также позволяет производить градуировку сканирующего зондового микроскопа в горизонтальной плоскости в кратчайшее время за счет сканирования не всей площади, занимаемой микроструктурой на основании тестовой структуры, а лишь двух отрезков, параллельных соответственно быстрому и медленному направлениям сканирования, в условиях, когда искомый коэффициент масштабирования по горизонтальной оси зависит от отклонения иглы сканирующего зондового микроскопа от основания тестовой структуры. 11 ил.
Тестовая структура для градуировки сканирующего зондового микроскопа, состоящая из основания и расположенных на нем микроструктур, отличающаяся тем, что микроструктуры имеют два или более параллельных основанию участка, находящихся на разных расстояниях от основания.
| ТЕСТОВАЯ СТРУКТУРА ДЛЯ ГРАДУИРОВКИ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 1997 |
|
RU2121656C1 |
| Устройство для обесцвечивания сиропов | 1976 |
|
SU676614A1 |
| ВЕРТОЛЕТ | 2018 |
|
RU2704643C1 |
| ТЕСТОВАЯ СТРУКТУРА ДЛЯ ГРАДУИРОВКИ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 1997 |
|
RU2121131C1 |
| ТЕСТОВАЯ СТРУКТУРА ДЛЯ ОПРЕДЕЛЕНИЯ ФОРМЫ И ГЕОМЕТРИЧЕСКИХ РАЗМЕРОВ ИГЛЫ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 1997 |
|
RU2121130C1 |

