Изобретение относится к технике определения уровня сыпучих материалов и может быть использовано в строительной, энергетической, пищевой и др. отраслях промышленности.
Известны лотовые уровнемеры, содержащие электродвигатель, барабан, трос с грузом, устройство управления (авторские свидетельства СССР NN 349901, 750281). Существенным недостатком перечисленных устройств является сложность конструкции и, следовательно, низкая надежность работы в условиях высокой запыленности, например, в бункерах энергетических котлов теплоэлектроцентралей, а также при работе с мелкодисперсными материалами (цемент и т.п.). Объясняется это тем, что в условиях запыленности существенно снижается надежность работы таких узлов уровнемера, как ролик весового рычага, устройство натяжения, датчики выключения, так как из-за осевшей пыли происходит нарушение функционирования электрических контактов (нарушение проводимости) и подвижных механических частей.
Наиболее близким аналогом предлагаемого решения является "Уровнемер сыпучих сред", содержащий реверсивный электродвигатель, барабан, лот в виде троса с грузом, датчик угла поворота барабана, электромагнитную зацепку (авторское свидетельство СССР N 690303, МПК-6 G 01 F 23/04). Данное устройство также обладает сложной конструкцией и низкой надежностью работы в условиях запыленности, что усугубляется еще и наличием в нем дополнительно электромагнитного устройства установки нулевого уровня. По замыслу этого изобретения обеспечение установки нулевого уровня лота должно являться положительным фактом, повышающим точность определения уровня сыпучих материалов, однако, достигнуто это за счет усложнения конструкции и, следовательно, снижения надежности устройства, что сводит на нет указанный положительный фактор. Кроме того, стопорение троса электромагнитом приводит к быстрому износу троса.
Задачей изобретения является повышение надежности работы лотового уровнемера сыпучих материалов.
Сущность изобретения заключается в том, что лотовый уровнемер, содержащий электродвигатель с редуктором, барабан, лот в виде троса с грузом, датчик угла поворота барабана, электромагнитную защелку, введены контроллер, элементы нагрузки электродвигателя в виде последовательно соединенных резистора и диода, датчик тока электродвигателя, ограничитель движения груза, при этом, первый вход контроллера подключен к выходу датчика угла поворота барабана, второй вход контроллера соединен с датчиком тока, первый выход контроллера подключен через обмотку питания электродвигателя к датчику тока, второй выход контроллера подключен к входу электромагнитной защелки.
Кроме того, контроллер содержит счетчик импульсов, таймер, блок индикации, компаратор, блок управления, при этом первый выход блока управления соединен через обмотку электродвигателя с датчиком тока, второй выход блока управления соединен со вторыми входами счетчика импульсов и таймера, третий выход блока управления соединен с электромагнитной защелкой, четвертый выход блока управления соединен с первым входом компаратора, первый вход блока управления соединен с выходом компаратора, второй вход блока управления соединен с выходом таймера, причем первые входы счетчика импульсов и таймера являются входом контроллера, второй вход компаратора является вторым входом контроллера, первый выход блока управления является первым выходом контроллера, третий выход блока управления является вторым выходом контроллера, а выход счетчика импульсов подключен к блоку индикации.
Наличие отличительных признаков подтверждает новизну предлагаемого решения.
Изобретательский уровень предлагаемого решения подтверждается разрешением технического противоречия, заключенного между обеспечением требуемой точности определения уровня сыпучих материалов, традиционно достигаемой за счет усложнения устройства, с одной стороны, и обеспечением надежности, требующей упрощения устройства, с другой стороны. Указанное противоречие разрешено путем технических решений, позволяющих электродвигателю кроме его прямых функций, выполнять функцию динамического торможения для обеспечения равномерного вращения барабана при движении лота вниз, а также функцию датчика нулевого уровня при подъеме лота.
Идея изобретения состоит в том, что одновременно с равномерно движущимся грузом лота формируется последовательность импульсов с периодом, пропорциональным заранее выбранному отрезку пройденного грузом пути, а факт достижения грузом поверхности сыпучего материала при опускании и начальной точки отсчета при подъеме лота устанавливают по значительному (например, в два раза) увеличению периода следования импульсов, при этом перемещение лота вниз осуществляется за счет кинетической энергии груза, закрепленного на конце троса, а скорость и равномерность движения груза, а следовательно, и барабана устанавливается и регулируется за счет моментных сил электродвигателя постоянного тока, работающего в режиме динамического торможения, при принудительном, за счет веса груза, вращении вала электродвигателя через редуктор, подъем груза производится за счет принудительного вращения барабана электродвигателем.
На чертеже представлена функциональная схема предлагаемого устройства.
Лотовый уровнемер сыпучих материалов содержит электродвигатель 1 постоянного тока с редуктором 2, на выходном валу которого жестко установлен барабан 3 (на торцевой поверхности которого со стороны электромагнитной защелки 7 нанесены пазы (не показаны) пилообразного профиля) с намотанным на него тросом 4, на конце которого закреплен груз 5, ограничитель 6 (выполненный в виде шайбы, внутренний диаметр которой больше диаметра троса 4, но меньше диаметра груза 5 и закрепленный в начальной точке отсчета, "нулевое" положение) движения груза 5, электромагнитную защелку 7, выполненную в виде стержня (не обозначен), подпружиненного с противоположной барабану 3 стороны и расположенного внутри обмотки (не показана) питания электромагнитной защелки 7, в исходном состоянии, при отсутствии питания на обмотке питания стержень выступает за торец защелки 7, датчик 8 (например, индукционный) угла поворота барабана 3, на боковой поверхности которого расположены металлические площадки 9 с шагом, определенным погрешностью измерения устройства, элементы нагрузки электродвигателя 1, выполненные в виде последовательно соединенных диода 10 и резистора 11, сопротивление которого выбирается в зависимости от веса груза 5, датчик 12 (выполненный, например, в виде резистора) тока электродвигателя 1, контроллер 13. При этом контроллер 13 имеет первый (дискретный) вход, соединенный с выходом датчика 8, второй (аналоговый) вход, соединенный с датчиком 12 тока, первый управляющий выход, соединенный через обмотку питания (не показана) электродвигателя 1 с датчиком 12 тока, и второй управляющий выход, соединенный с обмоткой питания (не показана) электромагнитной защелки 7, по которому подается напряжение питания на электромагнитную защелку 7. Контроллер 13 может быть выполнен из счетчика 14 импульсов, таймера 15, блока 16 индикации, компаратора 17, блока 18 управления. При этом первый выход блока 18 управления соединен через обмотку электродвигателя с датчиком 12 тока, второй выход блока 18 управления соединен со вторым входом счетчика 14 импульсов и таймера 15, третий выход блока 18 управления соединен с электромагнитной защелкой 7, четвертый выход блока 18 управления соединен с первым входом компаратора 17, первый вход блока 18 управления соединен с выходом компаратора 17, второй вход блока 18 управления соединен с выходом таймера 15, причем первые входы счетчика 14 импульсов и таймера 15 является первым входом контроллера 13, второй вход компаратора 17 является вторым входом контроллера 13, первый выход блока 18 управления является первым выходом контроллера 13, третий выход блока 18 управления является вторым выходом контроллера 13, а выход счетчика 14 импульсов подключен к блоку 16 индикации.
Лотовый уровнемер работает следующим образом. В исходном положении груз 5 находится в "нулевом" положении возле ограничителя 6 движения 5. Трос 4 намотан на барабан 3. Электромагнитная защелка 7 фиксирует барабан 3, предотвращая его самопроизвольное вращение. Электродвигатель 1 и электромагнитная защелка 7 обесточены, счетчик 14 и таймер 15 обнулены, блок 16 индикации информирует о нулевом показании счетчика 14.
По команде оператора, либо автоматически, с периодом, заложенным в программу блока 18 управления, с его третьего выхода поступает сигнал на электромагнитную защелку 7, вследствие чего фиксация барабана 3 снимается.
Барабан 3 под действием моментных сил, создаваемых весом груза 5, начинает вращаться, трос 4 разматывается, груз 5 опускается вниз. Вращение барабана 3 через редуктор 2 передается валу электродвигателя 1, который вырабатывает напряжение, пропорциональное скорости вращения вала электродвигателя 1. Таким образом, электродвигатель 1 работает в режиме генератора. Протекающий через нагрузку (диод 10 и резистор 11) электродвигателя 1 ток создает момент сопротивления, пропорциональный величине указанного тока. Возникающее равновесие моментных сил обеспечивает равномерную скорость опускания груза 5, а величина скорости опускания определяется величиной резистора 11.
Датчик 8 угла при прохождении мимо него металлических площадок 9, (нанесенных на барабан 3) количество которых определяется выбранной точностью измерения, формирует последовательность импульсов, период которых определяется угловой скоростью барабана 3 и количеством металлических площадок 9.
Импульсы с выхода датчика 8 угла поступают на первый вход счетчика 14 импульсов и первый вход таймера 15. Счетчик 14 определяет количество импульсов, поступающих с выхода датчика 8. Таймер 15 запускается задним фронтом импульса, поступающего с датчика 8 на его первый вход, и по истечению времени, равному τ3(τ3 равняется времени, в течение которого с выхода датчика 8 при равномерном движении груза 5 поступает на вход таймера 15, например, два импульса), с его выхода на второй вход блока 18 управления поступает сигнал. В исходное состояние таймер 16 устанавливается сигналом, поступающим со второго выхода блока 18 управления, или передним фронтом импульса, поступающего с датчика 8, поэтому таймер 15 в течение времени движения груза 5, а следовательно, генерации последовательности импульсов находится в исходном состоянии.
При достижении грузом 5 поверхности материала, барабан 3 остановится практически мгновенно, что обеспечивается соответствующим подбором параметров элементов 10 и 11 нагрузки электродвигателя 1. Импульсы с выхода датчика 8 угла прекращают поступать на счетчик 14 и таймер 15. Последний импульс, поступающий с датчика 8, запустит задним фронтом таймер 15, с выхода которого по истечению времени τ3 на второй вход блока 18 управления поступает сигнал, по которому с первого выхода блока 18 управления поступает напряжение питания на обмотку (не показана) электродвигателя 1 и датчика 12 тока. Одновременно с четвертого выхода блока 18 управления на первый вход компаратора 17 поступает опорный ток.
Электродвигатель 1 через редуктор 2 приводит во вращение барабан 3, трос 4 наматывается на барабан 3, груз 5 поднимается. При вращении барабана 3 импульсы с датчика 8 угла вновь поступают на первые входы счетчика 14 и таймера 15. При этом таймер 15 передним фронтом импульса, поступающего с датчика 8 угла, устанавливается в исходное положение. При достижении грузом 5 упора 6 барабан 3 останавливается, сигналы с выхода датчика 8 угла перестают поступать на счетчик 14 и таймер 15. Одновременно, через редуктор 2 на вал электродвигателя 1 прикладывается тормозящее усилие, вызванное упором 6. Это приводит к резкому увеличению тока, протекающего через обмотку электродвигателя 1, и следовательно, через датчик 12 тока, соединенного со вторым входом компаратора 17. При достижении величины тока, протекающего через обмотку электродвигателя 1, порогового значения, установленного блоком 18 управления и поданного через его четвертый выход на первый вход компаратора 17, последний срабатывает, и с его выхода на первый вход блока 18 управления поступает сигнал. По истечение времени, равного τ3, с выхода таймера 15 на второй вход блока 18 управления поступает сигнал. При одновременном наличии сигналов на первом втором входах блока 18 управления с его первого и третьего выходов снимаются питающие напряжения соответственно для двигателя 1 и электромагнитной защелки 7, последняя фиксирует барабан 3, а со второго выхода блока 18 управления поступает сигнал на второй вход счетчика 14 и второй вход таймера 15, вследствие чего информация со счетчика 14 переписывается в блок 16 индикации в виде половины значения показания счетчика 14, что равняется значению измеряемого лотом уровня сыпучего материала, а таймер 15 устанавливается в исходное состояние.
Цикл измерения закончен, в блоке 16 индикации сохраняется значение измеренного уровня сыпучего материала. Повторный цикл измерения инициируется, как указано выше, оператором или по заданной программе.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ВЫГРУЗКИ СЫПУЧЕГО МАТЕРИАЛА | 2005 |
|
RU2289793C2 |
| УРОВНЕМЕР ДЛЯ СЫПУЧИХ МАТЕРИАЛОВ | 2003 |
|
RU2301407C2 |
| Фотоэлектрический дистанционный уровнемер | 1990 |
|
SU1789873A1 |
| Лотовый уровнемер | 1986 |
|
SU1381338A1 |
| Электромеханический уровнемер | 1975 |
|
SU609058A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УРОВНЯ СЫПУЧИХ МАТЕРИАЛОВ | 1996 |
|
RU2105269C1 |
| Способ контроля уточной нити на ткацком станке с челноком-захватом и устройство для его осуществления | 1990 |
|
SU1784684A1 |
| Устройство для обработки проб сыпучих материалов (его варианты) | 1982 |
|
SU1074992A1 |
| Устройство для автоматического контроля растворов и провалов контактов коммутационного электроаппарата | 1989 |
|
SU1709415A1 |
| СИСТЕМА ОХРАННОЙ СИГНАЛИЗАЦИИ | 1993 |
|
RU2092903C1 |
Изобретение относится к измерению сыпучих материалов в строительной, энергетической, пищевой и др. отраслях промышленности. Уровнемер содержит электродвигатель с редуктором, барабан, лот в виде троса с грузом, датчик угла поворота барабана, электромагнитную защелку, контроллер, элементы нагрузки электродвигателя в виде последовательно соединенных резистора и диода, подключенных параллельно обмотке электродвигателя, датчик тока электродвигателя и ограничитель движения груза. Первый вход контроллера подключен к выходу датчика угла поворота барабана, второй вход контроллера соединен с датчиком тока, первый выход контроллера подключен через обмотку электродвигателя к датчику тока, второй выход контроллера подключен к электромагнитной защелке. Контроллер содержит счетчик импульсов, таймер, блок индикации, компаратор, блок управления. Обеспечено повышение надежности. 1 з.п. ф-лы, 1 ил.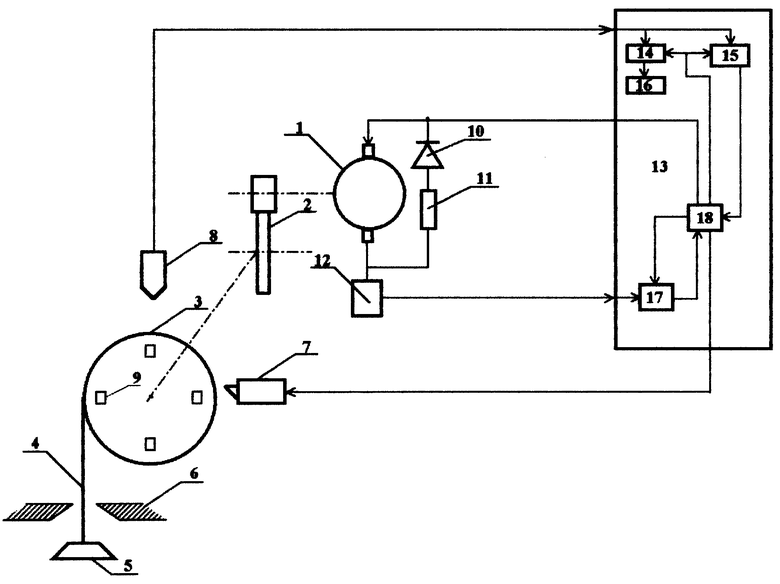
| Уровнемер сыпучих сред | 1977 |
|
SU690303A1 |
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| US 4219133 A, 26.08.1980 | |||
| Сигнализатор уровня сыпучих материалов | 1989 |
|
SU1749714A1 |
