Изобретение относится к области авиации.
Известен автономный привязной летательный аппарат для дистанционного наблюдения за местностью, содержащий корпус в форме несущего крыла, контейнер с аппаратурой и швартовочный трос (Авторское свидетельство СССР N 759729, В 64 С 31/06,1992 [1]).
Длительность непрерывного использования этого аппарата ограничена емкостью источников энергии для питания аппаратуры.
Задачей изобретения является разработка аппарата, позволяющего в автономном режиме вести более длительный непрерывный контроль обстановки на определенном участке местности с передачей информации по системе радиосвязи на пункт приема и анализа данных.
Для решения указанной задачи предлагается автономный привязной летательный аппарат для дистанционного наблюдения за местностью, содержащий корпус в форме несущего крыла, контейнер с аппаратурой и швартовочный трос, а также снабженный ветроэнергетической установкой, имеющей ветроколесо и электрический генератор для упомянутой аппаратуры, а упомянутый корпус выполнен в виде заполненной газом оболочки, имеющей внутренний канал для упомянутой ветроэнергетической установки и подкрепленной стержневой силовой системой.
Оболочка может быть заполнена легким газом для получения дополнительной всплывной подъемной силы, позволяющей разместить аппарат на определенной высоте над уровнем моря.
Рабочая высота должна быть не ниже 200 м. Ограничение высоты обусловлено характером изменения скорости ветра по толщине пограничного слоя Земли. Воздушный поток при обтекании крыла аппарата создает аэродинамическую силу, которая в сумме со всплывной силой дает силу, вектор которой направлен вверх на увеличение высоты и снос по ветру. Сила тяжести от поднимаемой массы (масса аппарата и удерживающего троса) и реакция от натяжения троса дают силу, вектор которой направлен вниз и в сторону, противоположную сносу. Рабочая высота H определяется скоростью ветра и поднимаемой массой. В зависимости от требуемой продолжительности нахождения на высоте доля всплывной силы в создании подъемной силы будет различна. При продолжительном нахождении аппарата на рабочей высоте из-за газопроницаемости оболочки концентрация легкого газа уменьшается до нуля. Целесообразно габаритные размеры аппарата (размах, удлинение и т.п.) определять для условия отсутствия всплывной силы.
Корпус с несущим крылом выполнен по интегральной схеме, что позволяет уменьшать аэродинамическое сопротивление [2, 3].
Аппарат снабжен двумя эжекторными накладками, каждая из которых расположена у конечного участка упомянутого внутреннего канала и предназначена для ускорения потока воздуха.
Для наблюдения за местностью контейнер с аппаратурой подвешен в нижней части упомянутого корпуса.
На законцовках упомянутого крыла установлены концевые шайбы.
Аппарат снабжен обечайкой для ветроэнергетической установки, а также каркасом корпуса и силовыми наборами крыла, которые замкнуты на упомянутую обечайку. Корпус аппарата снабжен конфузорным и диффузорным кольцами, которые с упомянутой обечайкой ветроэнергетической установки составляют силовую систему, предназначенную для крепления упомянутой тросовой разводки.
Ветроколесо упомянутой ветроэнергетической установки имеет быстроходность Z больше 3,5 и соединено с упомянутым электрическим генератором посредством редуктора.
Контейнер аппарата снабжен стабилизирующими гироскопами, которые предназначены для парирования колебаний и вращения упомянутого корпуса. Аппарат может быть использован подразделениями пожарной охраны, пограничными войсками, организациями по охране леса, в частях гражданской обороны и т.д.
Перечень чертежей.
Фиг. 1 - общий вид летательного аппарата.
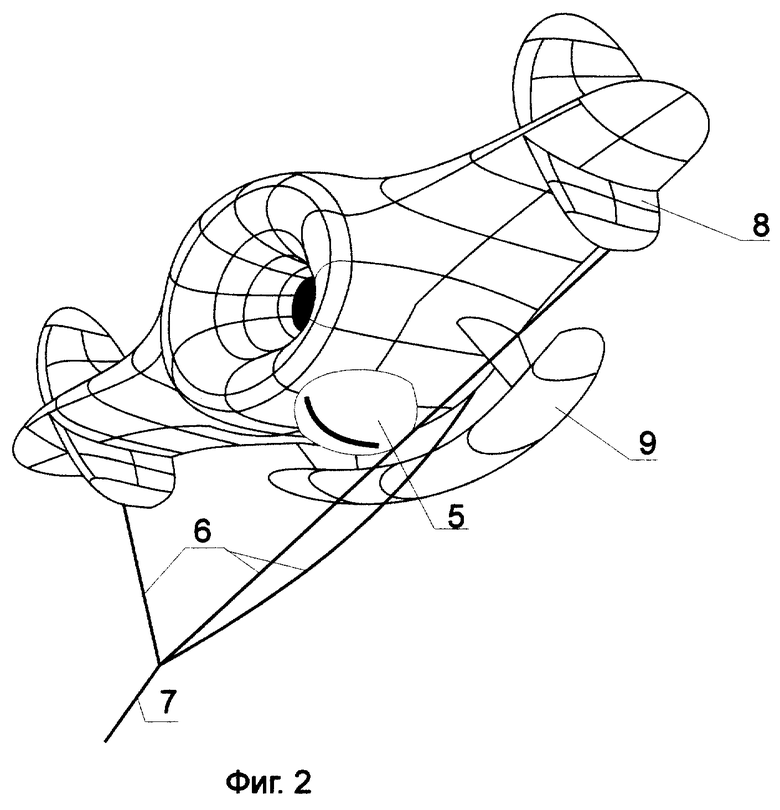
Фиг. 2 - схема расположения контейнера с аппаратурой.
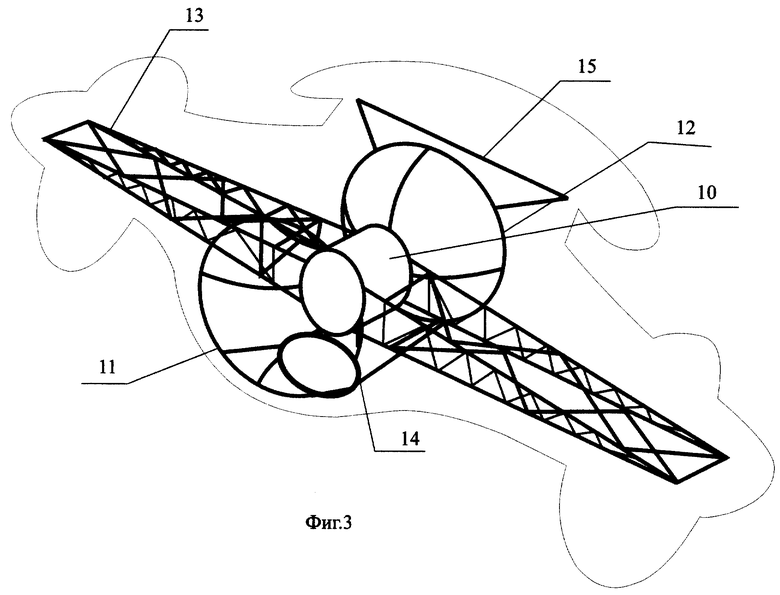
Фиг. 3 - силовая система летательного аппарата.
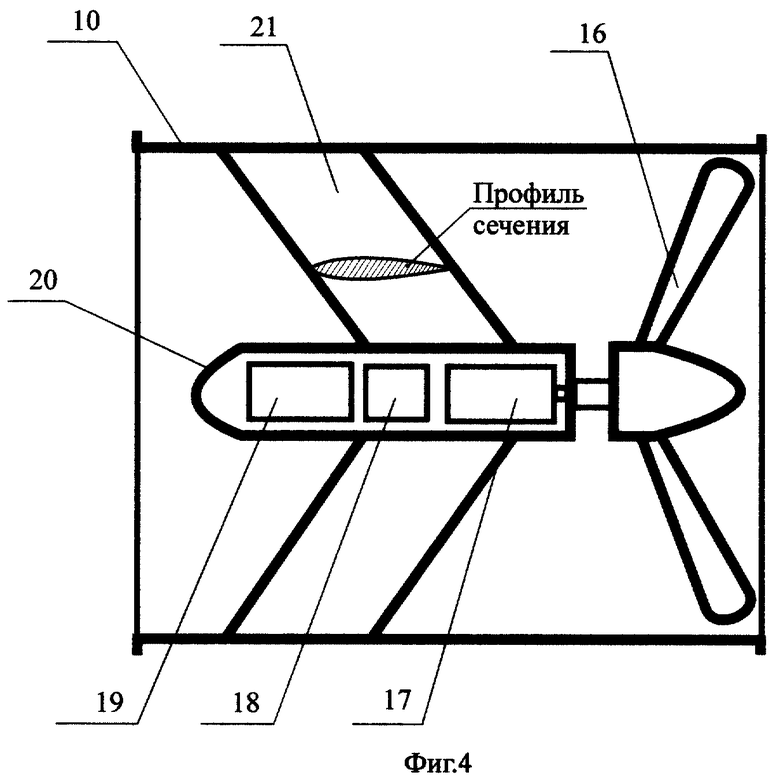
Фиг. 4 - схема энергетического узла.
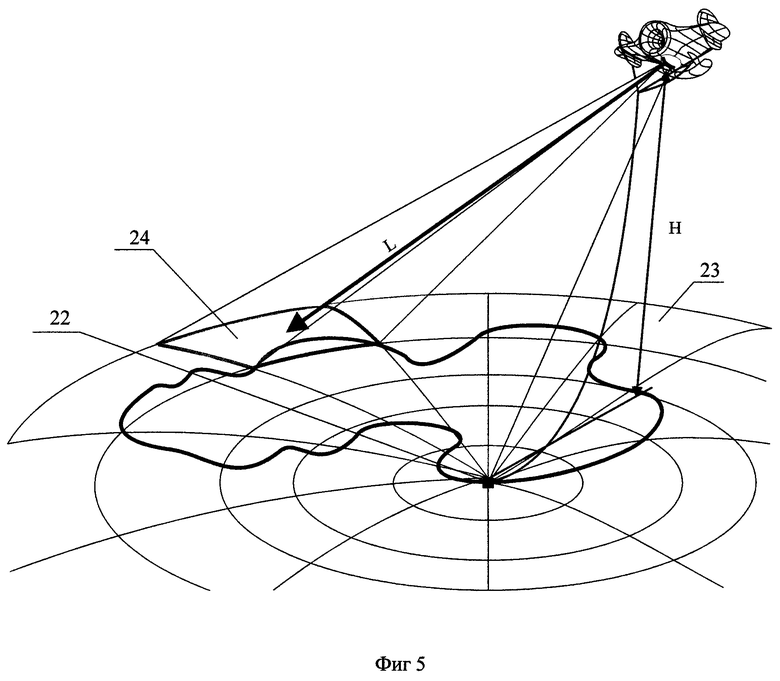
Фиг. 5 - схема наблюдения за обстановкой.
Фиг. 6 - схема установки датчика обзора поверхности.
Автономный привязной летательный аппарат (фиг. 1) для дистанционного наблюдения за местностью содержит корпус 1, несущее крыло 2, энергоузел 3 с ветроэнергетической установкой 4, контейнер 5 с аппаратурой (фиг. 2), тросовую разводку 6 и швартовочный трос 7.
Контейнер 5 с аппаратурой подвешен в нижней части упомянутого корпуса 1 (фиг. 1).
На законцовках упомянутого крыла 2 установлены концевые шайбы 8.
Энергоузел 3 расположен в центральной части корпуса 1, который представляет собой цилиндрическую оболочку, интегрированную в крыло 2.
Летательный аппарат снабжен верхней и нижней эжекторными накладками 9, которые расположены у конечного участка корпуса 1 и предназначены для ускорения воздушного потока, выходящего из внутреннего канала.
Корпус 1 и крыло 2 имеют оболочку, которая подкреплена (фиг. 3) стержневой силовой системой, состоящей из обечайки 10, конфузорного кольца 11 и диффузорного кольца 12, предназначенных для формирования во внутренней части корпуса 1 канала, имеющего сужающийся участок для разгона воздушного потока на выходе до скорости, в 3 раза превышающей скорость воздушного потока на входе.
Расширяющийся участок канала имеет профиль с учетом ограничения степени диффузорности по сечениям для исключения возможного отрыва воздушного потока.
Ветроэнергетическая установка 4 установлена в обечайке 10 канала корпуса 1. Полость оболочки корпуса 1 и крыла 2 заполнена легким газом для создания аэростатической подъемной силы.
Конфузорное кольцо 11 и диффузорное кольцо 12 с обечайкой 10 ветроэнергетической установки составляют силовую систему, предназначенную для крепления тросовой разводки 6.
В оболочке предусмотрены клапаны, предназначенные для заполнения полости наружным воздухом при продолжительном нахождении аппарата на рабочей высоте для поддержания заданного давления путем компенсации уменьшения концентрации легкого газа из-за газопроницаемости оболочки.
К обечайке 10 прикреплены силовые наборы 13 плоскостей крыла 2. В нижней части корпуса 1 при помощи дугообразных лонжеронов к кольцам 11 и 12 прикреплено силовое кольцо 14, являющееся основанием подвесного контейнера 5 с аппаратурой.
Профили верхней и нижней эжекторных накладок 9 для обеспечения жесткости имеют раму 15.
Таким образом, наружная обечайка 10 ветроэнергетической установки 5 является основным силовым элементом, предназначенным для уравновешивания всех сил и моментов, действующих на конструкцию летательного аппарата. Ветроэнергетическая установка 4 энергоузла 3 имеет (фиг.4) быстроходное (Z > 3,5) ветроколесо 16 и электрический генератор 17, которые соединены валом через редуктор, блок регулирования электрической энергии и защиты системы энергоснабжения 18 [4] и блок встроенного контроля 19 [5]. Генератор 17, блок регулирования электрической энергии и защиты системы энергоснабжения 18 и блок встроенного контроля 19 размещены в центральном теле 20, которое соединено с наружной обечайкой 10 при помощи силовых стоек 21.
Блок регулирования электрической энергии и защиты системы энергоснабжения 18 и блок встроенного контроля 19 предназначены для стабилизации напряжения питания аппаратуры в контейнере 5 и выполняются по рекомендациям [3, 4]. Редуктор между ветроколесом 16 и генератором 17 необходим в связи с тем, что максимальное значение частоты вращения якоря имеет ограничение по условиям прочности. Для электрического генератора мощностью 4 кВт с номинальной частотой вращения 3000.0 об/мин необходим редуктор с передаточным числом i= 1.6. В этом случае для условий: скорость потока V=20.0 м/с, мощность 4 кВт, Z=4, ветроколесо имеет следующие параметры:
- диаметр ветроколеса D = 1.02 м;
- длина лопасти L = 0.407 м;
- частота вращения n = 4708.2 об/мин.
Для дистанционного наблюдения за местностью летательный аппарат выводится (фиг. 5) на рабочую высоту H не ниже 200 м за счет собственной аэростатической всплывной силы, где удерживается швартовочным тросом 7 лебедки аэростатного удерживающего устройства 22, которое смонтировано на шасси автомобиля Урал-375.
Обозреваемая поверхность 23 разбивается на отдельные участки 24, имеющие форму, близкую к прямоугольной. Каждый участок имеет свой идентификационный номер, отражающий координаты участка (азимут, удаление L, границы) и степень приоритетности.
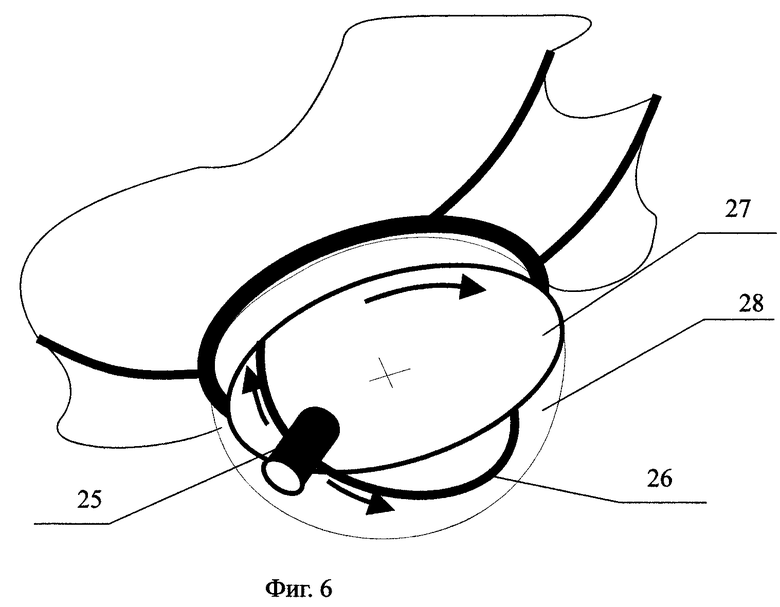
В состав аппаратуры контейнера 5 входит (фиг. 6) датчик 25 для получения информации о происходящих событиях (пожар, движение объекта и т.п.), который установлен на раме 26 с возможностью возвратно-поступательного движения в вертикальной плоскости. Рама 26 прикреплена к платформе 27, которая установлена на силовое кольцо 14 с возможностью вращения относительно него.
Таким образом, платформа 27 позволяет изменять азимутальную координату, а рама 26 - радиальную координату сектора на обозреваемой поверхности.
Платформа 27 с датчиком 25 закрыта прозрачным защитным колпаком 28, который герметично с помощью уплотнителя неподвижно прикреплен к силовому кольцу 14. Дополнительно в контейнере 5 установлены стабилизирующие гироскопы, позволяющие автоматически парировать перемещение аппарата относительно удерживающего устройства 22, а также короткопериодические колебания и вращение корпуса 1 аппарата как твердого тела относительно скоростной системы координат.
Считываемая с участков 24 за один полный оборот платформы 27 информация при помощи радиопередатчика передается на пункт приема и анализа информации для определения координат происходящего события и прогнозирования его дальнейшего развития.
Расстояние от пункта приема и анализа информации до аппарата определяется возможностями системы радиосвязи.
Источники информации
1. Авторское свидетельство СССР N 759729, В 64 С 31/06, 1992.
2. Н. А.Гриценко, E.Д.Икрянников. Расчет аэродинамических характеристик самолета. Учебное пособие. М.: ВИА им. Н.Е. Жуковского, 1994 г.
3. Ray Whitford. Design for combat. Jane's Publishing inc. London, 1987.
4. Д.Э.Брускин, И.М.Синдеев. Электроснабжение летательных аппаратов: Учеб. для энергет. и авиац. спец. вузов. - М.:Высшая школа, 1988 г.
5. Авиационные цифровые системы контроля и управления. Под ред. д-ра техн. наук В.А. Мясникова. Л.: Машиностроение, 1976 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНАЯ ВЕТРОЭНЕРГЕТИЧЕСКАЯ СТАНЦИЯ ВОЗДУШНОГО РАЗМЕЩЕНИЯ | 1998 |
|
RU2159356C2 |
| Разведывательный летательный аппарат | 2023 |
|
RU2800213C1 |
| СПОСОБ НАБЛЮДЕНИЯ ОБЪЕКТОВ С ДИСТАНЦИОННО ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА, ДИСТАНЦИОННО ПИЛОТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И ОБЗОРНАЯ КАДРОВАЯ СИСТЕМА ДИСТАНЦИОННО ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2279999C2 |
| ПРИВЯЗНОЙ АЭРОСТАТ | 2018 |
|
RU2688115C1 |
| ПРИВЯЗНОЙ ВОЗДУШНЫЙ ИМИТАТОР ВЕРТОЛЁТА | 2016 |
|
RU2622583C1 |
| УСТРОЙСТВО ДЛЯ АЭРОГЕОФИЗИЧЕСКОЙ РАЗВЕДКИ (ВАРИАНТЫ) | 2002 |
|
RU2201603C1 |
| Гибридная аэромобильная система воздушного наблюдения | 2023 |
|
RU2827131C1 |
| КОМБИНИРОВАННАЯ АВИАЦИОННАЯ ТРАНСПОРТНАЯ СИСТЕМА ДЛЯ ПЕРЕВОЗКИ СЖАТЫХ ГАЗОВ | 2002 |
|
RU2244639C2 |
| ПРИВЯЗНОЙ АЭРОСТАТ | 2018 |
|
RU2702935C2 |
| Эжекторная установка ускорения воздушного потока и ее применение (варианты) | 2022 |
|
RU2792494C1 |
Изобретение относится к летательным аппаратам, предназначенным для непрерывного наблюдения с воздуха за отдельными участками местности при решении природоохранных, пожароохранных и военных задач. Аппарат содержит корпус 1, крыло 2, энергоузел 3 с быстроходной ветроэнергетической установкой 4, контейнер с аппаратурой для наблюдения за местностью. Аппарат имеет силовую систему, предназначенную для крепления тросовой разводки. Изобретение направлено на повышение надежности получения данных об обстановке на просматриваемой территории. 10. з.п. ф-лы, 6 ил.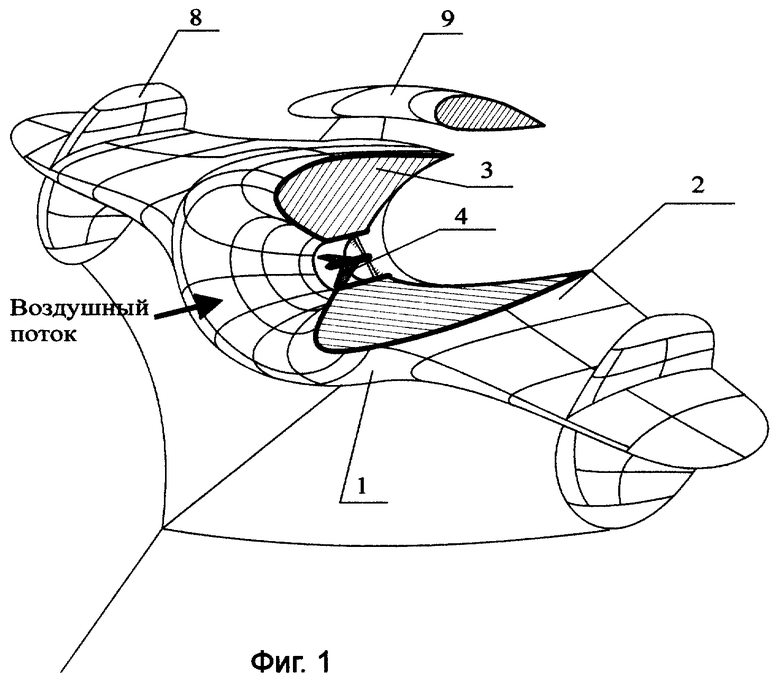
| Воздушный грузовой змей | 1990 |
|
SU1759729A1 |
| :НА-Й | 0 |
|
SU378340A1 |
| US 4285481 A, 25.08.1981 | |||
| DE 2907187 A1, 28.08.1980. | |||
