Изобретение относится к области навигации, а именно к интегрированной (комплексной) навигационной аппаратуре на основе аппаратуры счисления координат (одометрической) и позиционной навигационной аппаратуры (спутниковой).
По принципу определения координат объекта навигационную аппаратуру (НА) можно разделить на аппаратуру счисления координат (HACK), которая определяет координаты на основе измерения параметров движения (величин скорости или ускорения) и направления движения, и позиционную НА (ПНА), автоматически определяющую свои координаты по информации о своем положении относительно некоторых ориентиров (неподвижных или движущихся), координаты которых известны.
К первому типу относится НА на основе использования датчиков скорости относительно среды (датчики воздушной скорости летательных аппаратов и лаги судов), на основе использования датчиков скорости относительно поверхности Земли (доплеровские датчики скорости, корреляционные), а также на основе использования датчиков ускорения (акселерометров).
Ко второму типу относится НА, определяющая свои координаты на основе приема радиосигналов от наземных источников или от спутников (астроориентаторы, радиотехнические позиционные и спутниковые).
В настоящее время на наземных транспортных средствах (НТС) в нашей стране используются HACK с использованием механических и доплеровских датчиков скорости (МДС и ДДС) и начинает устанавливаться навигационная аппаратура пользователя спутниковых навигационных систем (Глонасс, GPS) типа "Бриз", "Грот".
Блок-схема HACK НТС представлена на фиг.1.
Эта аппаратура состоит из датчика величины скорости движения, называемого путевой системой (ПС1), датчика направления скорости движения, называемого курсовой системой (КС2), вычислителя координатных скоростей (ВКС3), интегратора (И4), сумматора (Σ5) и блока ввода начальных координат (БВНК6), соответствующие входы ВКС3 соединены с выходами ПС1 и КС2, а выходы - с соответствующими входами И4, выходы которого соединены с первыми входами Σ5, а вторые входы которого по начальным координатам соединены с выходами БВНК6, а выходы Σ5 являются выходами аппаратуры по координатам.
Алгоритм счисления координат, который реализуется в данной аппаратуре, выглядит так:
где  - комплексные координаты;
- комплексные координаты;
R - радиус-вектор (модуль) от начальной точки до текущей;
V - величина скорости движения;
αV - угол направления движения;
αR - направление текущего радиуса-вектора.
 - координаты точки в момент начала движения.
- координаты точки в момент начала движения.
Понятно, что при абсолютно точном определении V,  счисляемые координаты тоже будут без погрешностей. Однако реальные ПС и КС вырабатывают сигналы в виде V(1+δV) и (αV+Δα), где δV - относительная погрешность измерения величины скорости, а Δα - абсолютная погрешность определения направления движения.
счисляемые координаты тоже будут без погрешностей. Однако реальные ПС и КС вырабатывают сигналы в виде V(1+δV) и (αV+Δα), где δV - относительная погрешность измерения величины скорости, а Δα - абсолютная погрешность определения направления движения.
В этом случае счисляемые координаты будут равны:
где  - постоянная относительная погрешность датчика скорости движения,
- постоянная относительная погрешность датчика скорости движения, - постоянная абсолютная погрешность датчика направления скорости движения,
- постоянная абсолютная погрешность датчика направления скорости движения, - координатная погрешность от переменных составляющих погрешностей ПС и КС.
- координатная погрешность от переменных составляющих погрешностей ПС и КС.
Практика показывает, что постоянные погрешности ПС и КС дают подавляющий "вклад" в погрешность счисления координат, при этом часть их обусловлена допусками на изготовление и установку ДДС и КС, разворотом корпуса НТС на подвеске и т. п. , которые убираются специально производимой для этого калибровкой аппаратуры на мерном участке. Остальная часть по-прежнему обеспечивает основной "вклад" в погрешность счисления координат и уменьшается только при изменении конструкции ПС и КС.
Поэтому в практике навигации применяются варианты коррекции HACK [1], в том числе и с помощью ПНА.
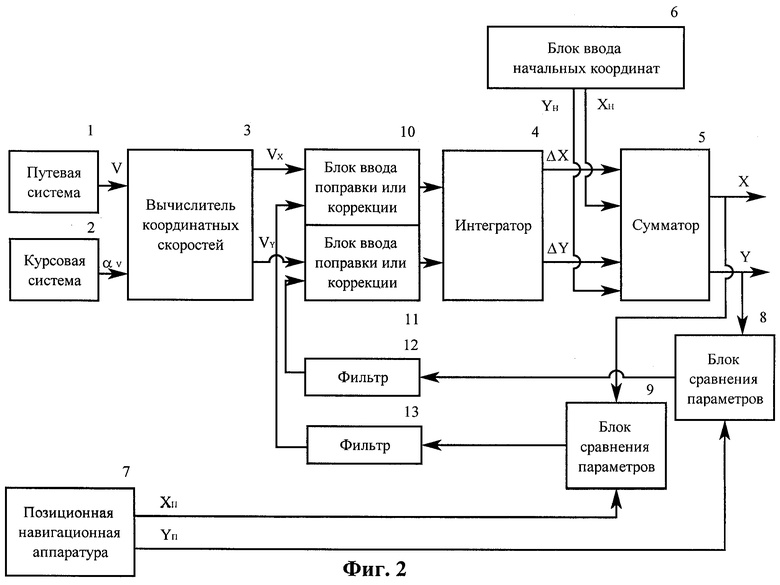
Блок-схема комплексной навигационной аппаратуры счисления координат (КАСК) на основе HACK и ПНА [1], которую можно взять за прототип, приведена на фиг.2.
Устройство-прототип включает в свой состав HACK (путевую систему (ПС1), курсовую систему (КС2), вычислитель координатных скоростей (ВКС3), интегратор (И4), сумматор (Σ5), блока ввода начальных координат (БВНК6), ПНА7, блоки сравнения параметров (БСП8, БСП9), блоки ввода поправок или коррекции (БВПК10, БВПК11) и фильтры Ф12, Ф13, при этом соответствующие входы ВКС3 соединены с выходами ПС1 и КС2, а выходы с первыми входами БВПК10 и БВПК11, выходы которых соединены с соответствующими входами И4, а выходы последнего соединены с соответствующими входами Σ5 по приращению координат, входы которого по начальным координатам соединены с соответствующими выходами БВНК6, а выходы являются выходами устройства по координатам и соединены с первыми входами соответствующих БСП8 и БСП9, вторые входы которых соединены с соответствующими выходами ПНА7, а выходы через Ф12 и Ф13 соединены со вторыми входами БВПК10 и БВПК11 соответственно.
Данная аппаратура реализует систему автоматического регулирования показаний HACK по показаниям ПНА, которые взяты за управляющие, причем поправки вводятся не в координаты, а в их производные (VХ и VУ), т.е. в устройстве реализован принцип И-регулятора.
Работа такого устройства по каждой координате описывается уравнением:
продифференцировав которое, получим:
X' = Х'с + (ХП - Х)Ф - дифференциальное уравнение работы И-регулятора (ФАПЧ), индекс "ф" означает, что величина профильтрована.
Свойства такой системы описаны в [2] и позволяют утверждать:
- средние выходные координаты КАСК равны средним координатам ПНА;
- переменные (флуктуирующие) погрешности равны погрешностям ПНА, пропущенным через фильтр.
Таким образом, комплексирование HACK с ПНА убрало погрешности HACK и подавило переменные погрешности ПНА, т.е. КАСК точнее наиболее точной НА из входящих в ее состав.
Недостатком аппаратуры-прототипа является необходимость непрерывной одновременной работы обоих составных частей КАСК: HACK и ПНА, т.к. в ней не предусмотрена калибровка HACK по ПНА, что сразу повышает требования к точности HACK и увеличивает погрешность при прекращении работы ПНА.
Изобретение направлено на увеличение точности определения координат КАСК в паузах работы ПНА за счет введения калибровки HACK по показаниям навигационной аппаратуры потребителей спутниковых навигационных систем (НАП СНС).
Сущность изобретения состоит в том, что в КАСК, состоящую из путевой системы, курсовой системы, вычислителя координатных скоростей, интегратора, сумматора, блока ввода начальных координат и позиционной навигационной аппаратуры в виде навигационной аппаратуры потребителей спутниковой навигационной аппаратуры, а также двух каналов коррекции в виде последовательно соединенных блоков сравнения параметров, фильтра и блока ввода поправок или коррекции, в которой выходы путевой и курсовой систем соединены с соответствующими входами вычислителя координатных скоростей, а выходы блока ввода начальных координат соединены с соответствующими входами сумматора, чьи выходы являются выходами КАСК по координатам, а для увеличения точности определения координат введены два преобразователя приращений плановых координат в радиальные, один преобразователь радиальных координат в приращения плановых координат, формирователь приращений позиционных координат, блок режима начальной установки, блок дифференцирования и фильтр, причем соответствующие выходы вычислителя координатных скоростей через интегратор соединены с соответствующими входами первого преобразователя приращений плановых координат в радиальные, выходы которого по модулю и углу радиус-вектора соединены со вторыми входами соответствующих блоков ввода поправки или коррекции и первыми входами соответствующих блоков сравнения параметров, выходы блоков ввода поправки или коррекции соединены с соответствующими входами преобразователя радиальных координат в приращения плановых координат, выходы которого соединены с соответствующими входами сумматора по приращению плановых координат, выходы позиционной навигационной аппаратуры соединены с соответствующими входами формирователя приращений позиционных координат и блока ввода начальных координат, выходы формирователя приращений позиционных координат соединены с соответствующими входами второго преобразователя приращений плановых координат в радиальные, соответствующие выходы которого соединены со вторыми входами соответствующих блоков сравнения параметров по модулю и углу радиус-вектора, вторые входы формирователя приращений позиционных координат соединены с соответствующими выходами блока ввода начальных координат, выход позиционной навигационной аппаратуры по качеству работы соединен с управляющими входами обоих блоков сравнения параметров, выходы блока режима начальной установки соединены с управляющими входами формирователя приращений позиционных координат, интегратора и блока ввода начальных координат соответственно, а выход блока сравнения параметров, сравнивающего углы радиус-векторов, полученных из первого и второго преобразователей, соединен со входом блока дифференцирования, выход которого через введенный фильтр соединен с управляющим входом курсовой системы.
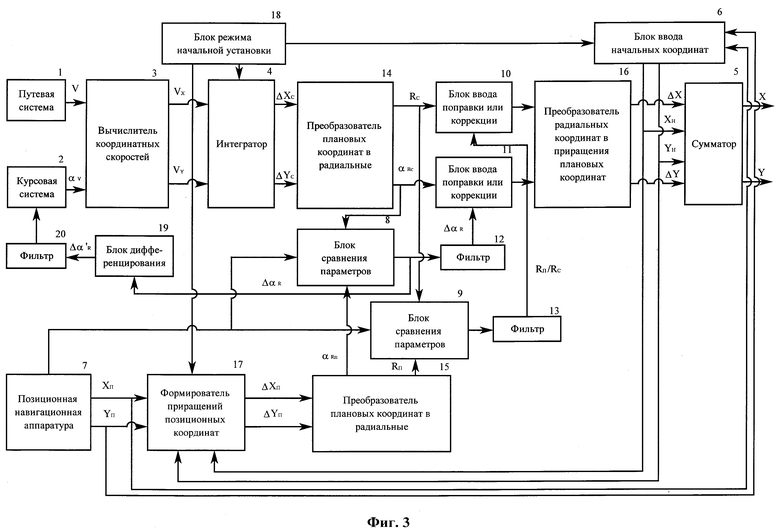
Сущность изобретения поясняется чертежами, где на фиг. 1 приведена блок-схема HACK, на фиг.2 - блок-схема КАСК-прототипа, на фиг.3 - блок-схема заявляемой КАСК.
Заявляемая комплексная аппаратура счисления координат (КАСК), блок-схема которой приведена на фиг.3, включает в свой состав путевую систему (ПС1), курсовую систему (КС2), вычислитель координатных скоростей (ВКС3), интегратор (И4), сумматор (Σ5), блок ввода начальных координат (БВНК6), позиционную навигационную аппаратуру (ПНА7) в виде НАП СНС, блоки сравнения параметров (БСП8, БСП9), блоки ввода поправки или коррекции (БВПК10, БВПК11) и фильтры (Ф12, Ф13), причем входы ВКС3 соединены с выходами ПС1 и КС2 соответственно, а выходы - с соответствующими входами И4, выходы БВНК6 соединены с входами Σ5 по начальным координатам, а выходы последнего являются выходами аппаратуры по координатам, выходы БСП8, БСП9 соединены с соответствующими входами БВПК10, БВПК11 через фильтры Ф12, Ф13 соответственно, а для обеспечения точной работы устройства в паузах работы ПНА7 в него введены преобразователи плановых координат в радиальные (ППКР14, ППКР15), преобразователь радиальных координат в приращения плановых координат (ПРКППК16), формирователь приращений позиционных координат (ФППК17) ПНА, блок режима начальной установки (БРНУ18) и блок дифференцирования (БД19) с фильтром (Ф20), причем входы ППКР14 соединены с соответствующими выходами И4, а выходы по радиальным координатам - с соответствующими входами соответствующих БВПК10, БВПК11 и с соответствующими входами соответствующих БСП8, БСП9, выходы БВПК10, БВПК11 соединены с соответствующими входами ПРКППК16, выходы которого соединены с входами Σ5 по приращениям плановых координат, выходы ПНА7 соединены с соответствующими входами БВНК6 и ФППК17, вторые входы которого соединены с соответствующими выходами БВНК6, а выходы - с соответствующими входами ППКР15, выходы которого соединены с соответствующими входами БСП8, БСП9, а выход ПНА7 (НАП СНС) по сигналу качества работы соединен с управляющими входами БСП8, БСП9, соответствующие выходы БРНУ18 соединены с соответствующими входами БВНК6, ФППК17 и И4, кроме того, выход БСП8 через БД19 и его Ф20 соединен с входом КС2 для управления прецессией гироскопа, компенсирующей его уход.
Принцип работы КАСК требует совершения марша НТС из некоторой начальной точки маршрута (НТМ). При этом возможны два режима:
1. Если координаты НТМ известны и оперативная обстановка позволяет провести определение начального угла движения, то в НТМ делается остановка, определяют начальное направление движения НТС (гирокомпасирование), вводят в БВНК6 координаты НТМ и оператор нажатием кнопки 1 на БРНУ18 посылает сигналы на БВНК6 и И4 для обнуления последнего и разрешения использовать в Σ5 и ФППК17 координат НТМ из БВНК6.
2. Если координаты неизвестны или оперативная обстановка не позволяет проводить гирокомпасирование, то оператор в момент нахождения НТС на НТМ нажимает на БРНУ18 кнопку 2, что приведет к обнулению И4 и вводу в БВНК6 координат НТМ из ПНА7. При этом НТМ может служить точка включения КАСК.
При дальнейшем движении в КАСК вычисляются (при обоих режимах ввода начальных данных) 2 набора приращения координат: от HACK и ПНА, из которых вычисляются текущий радиус-вектор точки положения на маршруте и угол направления его в используемой системе координат. Одинаковые величины (RП и RС, αRC и αRП) поступают на БСП8, БСП9, где определяются величины:  которые поступают в БВПК10, БВПК11 и исправляют вырабатываемые в HACK R и αR по правилу: R=RC•RП/RС=RП и
которые поступают в БВПК10, БВПК11 и исправляют вырабатываемые в HACK R и αR по правилу: R=RC•RП/RС=RП и  а также в БД19, откуда
а также в БД19, откуда  через Ф20 поступает в КС1 для создания компенсирующей уход прецессии.
через Ф20 поступает в КС1 для создания компенсирующей уход прецессии.
В материалах заявки показано, что постоянные погрешности RC и αRC равны соответствующим погрешностям ПС и КС, поэтому возможно эквивалентное исполнение КАСК с установкой БВПК на выходах ПС и КС соответственно. Исправленные (подстроенные) радиальные координаты поступают в ПРКППК16, с выхода которого исправленные приращения плановых координат поступают в Σ5, где суммируются с начальными координатами и формируют текущие координаты (X, У) точки местонахождения НТС.
Так КАСК работает при прерывной работе ПНА (НАП СНС).
При пропадании информации от НАП СНС выработка поправок и корректур останавливается и выходные координаты определяются HACK по последним их значениям.
Техническая идея КАСК была экспериментально проверена на аппаратуре, реализованной в виде совокупности датчиков: механического датчика величины скорости, гироскопического датчика угла направления скорости, позиционного датчика координат (НАП СНС типа "Бриз-К") и вычислительной машины "Багет-21".
С такой аппаратурой было совершено несколько маршей на разных трассах. Результаты испытаний подтверждают выводы авторов относительно эффективности работы заявляемой КАСК.
Проведенный анализ работы КАСК и результаты испытаний показывают, что заявляемая КАСК обеспечивает не только повышение точности выработки координат по сравнению с одной HACK, но одновременно обеспечивает:
- снижение требования по точности к HACK (а значит и снижение трудоемкости ее изготовления и стоимости);
- снижение времени готовности навигационной аппаратуры и возможность обеспечения стрельбы НТС "сходу";
- эксплуатацию КАСК без калибровки на специально подготовленной трассе (мерном участке);
- эксплуатацию КАСК без начального ориентирования (исключения прибора определения начального азимута НТС);
- снижение требований к квалификации обслуживающего персонала.
Источники информации
1. В.П.Селезнев. Навигационные устройства. М.: Машиностроение, 1974.
2. Г.И.Тузов. Выделение и обработка информации в доплеровских системах. М.: Сов. радио, 1967.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ С КОНТРОЛЕМ ЦЕЛОСТНОСТИ НАВИГАЦИОННЫХ ДАННЫХ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2014 |
|
RU2565834C1 |
| Автоматизированная система навигации с контролем целостности навигационных данных спутниковых радионавигационных систем по информации механического и доплеровского датчиков скорости | 2016 |
|
RU2640312C2 |
| Автоматизированная система навигации с контролем целостности навигационных данных спутниковых радионавигационных систем по информации бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2642151C2 |
| Автоматизированная система навигации с контролем аномальных измерений координат от спутниковых радионавигационных систем | 2022 |
|
RU2783480C1 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ С КОМПЕНСАЦИЕЙ ПОГРЕШНОСТИ ОТ ВРАЩЕНИЯ АГРЕГАТА | 2000 |
|
RU2173834C1 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ С АВТОМАТИЧЕСКОЙ КОРРЕКЦИЕЙ ПОКАЗАНИЙ | 2000 |
|
RU2184349C1 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ ПО ДВУМ СОСТАВЛЯЮЩИМ СКОРОСТИ | 2000 |
|
RU2184348C2 |
| КОМПЛЕКСНАЯ СПУТНИКОВАЯ НАВИГАЦИОННАЯ АППАРАТУРА | 2005 |
|
RU2294527C1 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ ШИРОКОГО ПРИМЕНЕНИЯ | 2001 |
|
RU2193755C1 |
| КОМПЛЕКСНАЯ АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ | 2013 |
|
RU2545490C1 |
Изобретение относится к области навигации наземных транспортных средств, а именно к интегрированной (комплексной) навигационной аппаратуре на основе аппаратуры счисления координат (одометрической) и позиционной навигационной аппаратуры (спутниковой). В частности, в данном изобретении применяется совместная обработка показаний аппаратуры счисления координат и навигационной аппаратуры потребителя спутниковой навигационной системы на основе автоматической регулировки первых по вторым. Изобретение позволяет увеличить точность определения координат, а также обеспечивает возможность работы без ручного ввода начальных координат, без определения начального азимута и без калибровки курсовой и путевой систем. 3 ил.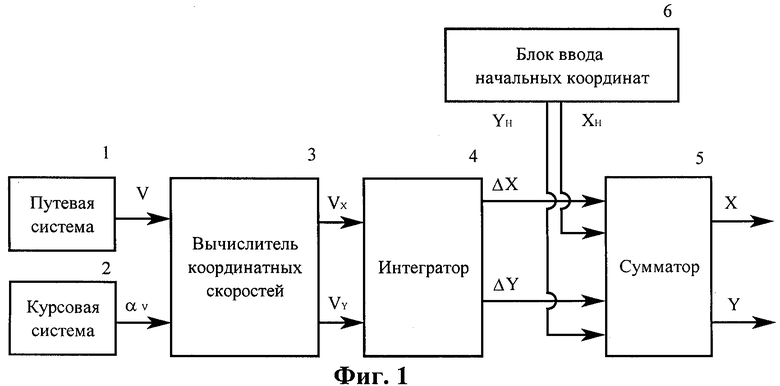
Комплексная аппаратура счисления координат, включающая в свой состав путевую систему, курсовую систему, вычислитель координатных скоростей, интегратор, сумматор, блок ввода начальных координат и позиционную навигационную аппаратуру в виде навигационной аппаратуры потребителей спутниковой навигационной системы, а также два блока сравнения параметров, два фильтра и два блока ввода поправки или коррекции, причем входы вычислителя координатных скоростей соединены с выходами путевой и курсовой систем соответственно, а выходы - с соответствующими входами интегратора, выход каждого блока сравнения параметров через соответствующий фильтр соединен с первым входом соответствующего блока ввода поправки или коррекции, выходы блока ввода начальных координат соединены с соответствующими входами сумматора, выходы которого являются выходами аппаратуры, отличающаяся тем, что в нее введены три преобразователя координат, формирователь приращений позиционных координат, блок режима начальной установки и блок дифференцирования с фильтром, причем выходы интегратора соединены с соответствующими входами первого преобразователя, выходы которого соединены со вторыми входами соответствующих блоков ввода поправки или коррекции, выходы позиционной навигационной аппаратуры по координатам соединены с соответствующими входами формирователя приращения позиционных координат и блока ввода начальных координат, а выходы формирователя соединены с соответствующими входами второго преобразователя, выходы которого соединены с первыми входами соответствующих блоков сравнения параметров, вторые входы которых соединены с соответствующими выходами первого преобразователя, выходы блоков ввода поправки или коррекции соединены с соответствующими входами третьего преобразователя, выходы которого соединены с соответствующими входами сумматора по приращению плановых координат, выходы блока ввода начальных координат соединены с соответствующими входами формирователя приращений позиционных координат, третий выход позиционной навигационной аппаратуры соединен с управляющими входами обоих блоков сравнения параметров, а соответствующие выходы блока режима начальной установки соединены с управляющими входами блока ввода начальных координат, формирователя приращений позиционных координат и интегратора соответственно, кроме того, выход блока сравнения параметров по углу радиус-вектора соединен с входом блока дифференцирования, выход которого через соответствующий фильтр соединен с входом курсовой системы по управлению прецессией.
| Селезнев В.П | |||
| Навигационные устройства | |||
| - М.: Машиностроение, 1974 | |||
| СПОСОБ КОМПЛЕКСИРОВАНИЯ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И КОМБИНИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2082098C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1998 |
|
RU2146803C1 |
| ПЕРЕДВИЖНОЙ ОПЕРАЦИОННО-ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 1995 |
|
RU2111733C1 |
| US 3630079 А, 28.12.1971. | |||

