Изобретение относится к области приборостроения и может быть использовано в приборах для определения координат подвижных наземных объектов, а также легких летательных аппаратов, катеров, яхт.
Известен способ определения местоположения, описанный в патенте Российской Федерации N 2082098, G 01 C 23/00, 20.06.97 "Способ комплексирования инерциальных навигационных систем и комбинированная навигационная система".
Способ включает коррекцию автономной навигационной системы по сигналам спутниковой навигационной системы. Способ отличается тем, что в качестве автономной навигационной системы используется инерциальная навигационная система, коррекция которой проводится от датчика базовой скорости (приемника спутниковой навигационной системы) путем воздействия корректирующими сигналами по угловой скорости на гироскопы горизонтальных каналов, сформированными фильтром коррекции по разности скоростей инерциальной навигационной системы и датчика базовой скорости, а также по разности сигналов с горизонтальных акселерометров, преобразованных через интегратор с обратной связью, и датчика базовой скорости.
Известное устройство содержит автономную навигационную систему, приемник спутниковой навигационной системы, первый, второй, третий сумматоры, фильтр коррекции. Кроме этого, устройство содержит интегратор, фильтр управления, а автономная навигационная система выполнена в виде инерциальной навигационной системы.
Известный способ и устройство отличаются сложностью, большой потребляемой мощностью и габаритами, что связано с использованием инерциальной навигационной системы. Поэтому такие системы не находят широкого применения для определения координат подвижных наземных объектов.
Наиболее близким по технической сущности к предлагаемому способу является способ, описанный в патенте Российской Федерации N 2098764, G 01 C 21/08, 1997г. "Способ определения местоположения подвижных объектов и устройство для его реализации".
Известный способ определения местоположения подвижных объектов заключается в следующем:
1) в калибровочном цикле осуществляют разворот подвижного объекта на угол не менее 360 градусов и проводят определение значений горизонтальных проекций суммарного вектора напряженности магнитного поля Земли (МПЗ) и магнитного поля объекта в четырех точках горизонтального эллипса магнитного годографа;
2) по контрольным значениям горизонтальных проекций определяют коэффициенты коррекции горизонтального эллипса магнитного годографа - смещение центра эллипса, малую и большую полуоси эллипса и угол поворота осей;
3) в каждом рабочем цикле измеряют усредненные за время 0,1..,2,0 с значения проекций суммарного вектора напряженности МПЗ и магнитного поля объекта и ускорения силы тяжести на оси приборной системы координат;
4) по измеренным значениям проекций с учетом коэффициентов коррекции, полученных в калибровочном цикле, определяют значения горизонтальных проекций вектора напряженности МПЗ на оси горизонтальной системы координат объекта;
5) по значениям горизонтальных проекций вектора напряженности МПЗ с учетом приращения пути и поправки направления определяют в рабочем цикле приращения координат и угол направления движения;
6) с учетом координат исходной точки определяют координаты объекта.
Для реализации известного способа используют устройство, описанное в приведенном выше патенте РФ N 2098764.
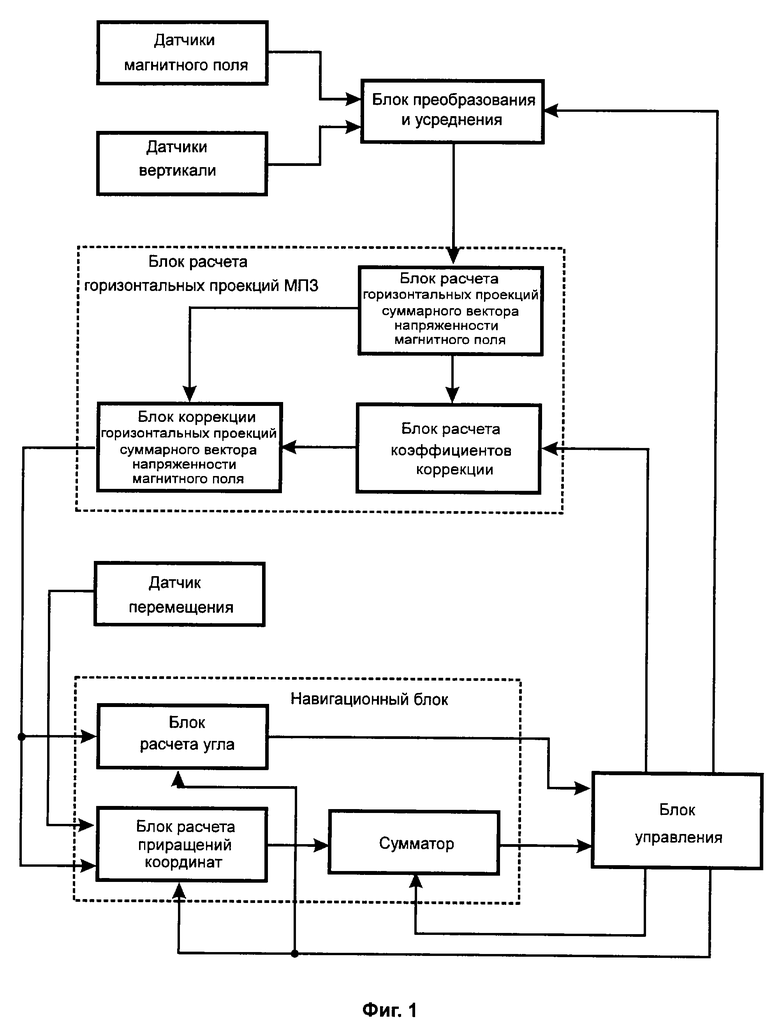
Устройство (фиг.1) содержит датчики магнитного поля, датчики вертикали, блок преобразования и усреднения, блок расчета горизонтальных проекций МПЗ, блок управления, датчик перемещения и навигационный блок. Блок расчета горизонтальных проекций МПЗ содержит блок расчета горизонтальных проекций суммарного вектора напряженности МПЗ и магнитного поля объекта, блок расчета коэффициентов коррекции горизонтального эллипса магнитного годографа и блок коррекции горизонтальных проекций суммарного вектора напряженности МПЗ и магнитного поля объекта, выходы которого являются выходами блока расчета горизонтальных проекций МПЗ, а первые входы соединены с первыми выходами блока расчета горизонтальных проекций суммарного вектора напряженности МПЗ и магнитного поля объекта, входы которого являются первыми входами блока расчета горизонтальных проекций МПЗ, а вторые выходы соединены с первыми входами блока расчета коэффициентов коррекции горизонтального эллипса магнитного годографа, вторые входы которого являются вторыми входами блока расчета горизонтальных проекций МПЗ, а выходы соединены со вторыми входами блока коррекции проекций суммарного вектора напряженности МПЗ и магнитного поля объекта. Навигационный блок содержит блок расчета приращений координат, блок расчета угла и сумматор. Выходы датчиков магнитного поля и датчиков вертикали соединены соответственно с первыми и вторыми входами блока преобразования и усреднения, выходы которого соединены с первыми входами блока расчета горизонтальных проекций МПЗ, выходы которого соединены с первыми входами блока расчета приращений координат и первыми входами блока расчета угла, выходы которого соединены с первыми входами блока управления, первые и вторые выходы которого соединены соответственно со вторыми входами блока расчета горизонтальных проекций МПЗ и третьими входами блока преобразования и усреднения, выходы сумматора соединены со вторыми входами блока управления.
Кроме этого, третьи выходы блока управления соединены со вторыми входами блока расчета угла и со вторыми входами блока расчета приращений координат, а четвертый выход блока управления соединен с первыми входами сумматора, выходы датчика перемещения соединены с третьими входами блока расчета приращений координат, выходы которого соединены со вторыми входами сумматора.
Известный способ и устройство предназначены для определения координат местоположения и угла направления движения, в первую очередь, подвижных наземных объектов. Способ и устройство относятся к автономным навигационным системам магнитного типа, использующим магнитное поле Земли для определения направления движения и одометрическую систему счисления пути для определения приращений пути.
Недостатками известного способа и устройства являются низкая точность измерения координат и угла направления движения и сложность их использования. Это связано с тем, что для автономных навигационных систем магнитного типа ошибки определения координат с течением времени (в зависимости от величины пройденного пути) возрастают, что требует периодической коррекции определяемых координат с помощью топографических карт, информации о координатах известных ориентиров и т.п. Точность известного способа и устройства снижается также в условиях воздействия внешних паразитных полей от линий электропередач постоянного тока, в зонах магнитных аномалий и т.п. Сложность их использования заключается, во-первых, в том, что требуется начальная привязка, т.е. ввод координат в исходной точке маршрута движения. Во-вторых, для таких систем необходима периодическая коррекция настраиваемых параметров навигационной системы. Для автономной навигационной системы магнитного типа такими параметрами являются поправка направления для курсовой системы и коэффициент пути для путевой системы. Поправка направления зависит от магнитного склонения (и сближения меридианов) в данной местности и рассогласования измерительной оси датчиков и продольной оси подвижного объекта. На подвижных объектах широко используются одометрические системы счисления пути, основанные на подсчете числа оборотов колеса или привода гусеницы. Коэффициент пути, определяющий пересчет числа оборотов в пройденном пути, зависит от состояния ходовой части: типа шин, давления в них и т.п. и характера местности. Определение поправки направления и коэффициента пути периодически проводят на контрольном участке с известными координатами начальной и конечной точек. Все это усложняет использование известного способа и устройства и ограничивает область их применения.
Задача, на решение которой направлено заявляемое изобретение, заключается в расширении области применения предлагаемого способа и устройства за счет повышения точности и достоверности измерений и автоматизации проведения калибровки и начальной привязки.
Технический результат, который может быть получен при осуществлении предлагаемого способа и устройства, заключается в повышении точности измерения координат и направления движения подвижного объекта и упрощении порядка проведения калибровки устройства и начальной привязки.
Для решения поставленной задачи предлагается способ, который заключается в следующем:
1) в калибровочном цикле осуществляют разворот подвижного объекта на угол не менее 270 градусов и определяют с помощью автономной навигационной системы значения горизонтальных проекций суммарного вектора напряженности МПЗ и магнитного поля объекта в четырех точках горизонтального эллипса магнитного годографа;
2) по контрольным значениям горизонтальных проекций определяют коэффициенты коррекции горизонтального эллипса магнитного годографа - смещение центра эллипса, малую и большую полуоси эллипса;
3) в каждом рабочем цикле автономной навигационной системы измеряют усредненные за время цикла значения проекций суммарного вектора напряженности МПЗ и магнитного поля объекта и ускорения силы тяжести на оси приборной системы координат;
4) по измеренным значениям проекций с учетом коэффициентов коррекции, полученных в калибровочном цикле, определяют значения горизонтальных проекций вектора напряженности МПЗ на оси горизонтальной системы координат объекта;
5) по значениям горизонтальных проекций вектора напряженности МПЗ с учетом поправки направления определяют угол направления движения и с учетом приращения пути определяют приращения координат за время рабочего цикла;
6) определяют с учетом координат исходной точки координаты подвижного объекта.
Кроме этого, предлагаемый способ включает следующее:
1) дополнительно определяют относительные координаты суммированием приращений координат, измеренных в каждом рабочем цикле;
2) определяют координаты объекта суммированием относительных координат и координат начальной точки;
3) дополнительно измеряют с помощью приемника спутниковой навигационной системы координаты объекта, с учетом которых проводят коррекцию относительных координат и координат начальной точки;
4) в процессе движения объекта на участках пути, превышающих не менее чем в три раза ошибку измерения координат приемником спутниковой навигационной системы, определяют приращения координат с помощью автономной навигационной системы и приемника спутниковой навигационной системы, по которым определяют корректирующие коэффициенты, с учетом которых в каждом рабочем цикле проводят коррекцию угла направления движения и приращения пути.
Решение задачи достигается также тем, что в устройство для определения местоположения подвижных объектов, содержащее датчики магнитного поля, датчики вертикали, блок преобразования и усреднения, блок расчета горизонтальных проекций МПЗ, блок управления, датчик перемещения, блок расчета угла, первый блок расчета приращений координат, первый сумматор, выходы датчиков магнитного поля и датчиков вертикали соединены соответственно с первыми и вторыми входами блока преобразования и усреднения, выходы которого соединены с первыми входами блока расчета горизонтальных проекций МПЗ, выходы которого соединены с первыми входами первого блока расчета приращений координат и первыми входами блока расчета угла, выходы которого соединены с первыми входами блока управления, первые и вторые выходы которого соединены соответственно со вторыми входами блока расчета горизонтальных проекций МПЗ и третьими входами блока преобразования и усреднения, выходы первого сумматора соединены со вторыми входами блока управления, введены второй блок расчета приращений координат, блок коррекции, блок расчета корректирующих коэффициентов, блок умножения, второй сумматор и приемник спутниковой навигационной системы, выходы которого соединены с первыми входами блока коррекции и первыми входами второго блока расчета приращений координат, вторые входы которого соединены с выходами первого блока расчета приращений координат и первыми входами второго сумматора, а выходы второго блока расчета приращений координат соединены с первыми входами блока расчета корректирующих коэффициентов, первые выходы которого соединены с первыми входами блока умножения, вторые входы которого соединены с выходами датчика перемещения, а выходы блока умножения соединены со вторыми входами блока коррекции и вторыми входами первого блока расчета приращений координат, третьи входы которого соединены со вторыми входами блока расчета угла и вторыми выходами блока расчета корректирующих коэффициентов, вторые входы которого соединены с третьими выходами блока управления, четвертые выходы которого соединены с третьими входами блока коррекции, четвертые входы которого соединены с выходами второго сумматора, а первые и вторые выходы блока коррекции соединены соответственно с входами первого сумматора и вторыми входами второго сумматора.
Введение в известный способ операции определения относительных координат суммированием приращений координат, измеренных в каждом рабочем цикле, определения координат объекта суммированием относительных координат и координат начальной точки, измерения с помощью приемника спутниковой навигационной системы координат объекта, с учетом которых проводят коррекцию относительных координат и координат начальной точки, обеспечивает повышенную точность и достоверность определения координат объекта в сравнении с известным способом. Это достигается, во-первых, тем, что определение относительных координат фактически проводится на основе комплексной обработки информации (с учетом ее достоверности), поступающей от автономной навигационной системы и приемника спутниковой навигационной системы. При этом, с одной стороны, обеспечивается учет систематических погрешностей автономной навигационной системы, с другой стороны, автономная навигационная система позволяет легко обнаруживать и исключать случайные некоррелированные между собой ошибки измерения приемника спутниковой навигационной системы. Во-вторых, повышенная точность измерения достигается также тем, что корректируются значения координат начальной точки в случаях низкой достоверности, например при неточном их определении по карте, а также при определении значений координат начальной точки с помощью приемника спутниковой навигационной системы в зонах неустойчивого приема радиосигналов. В этих случаях постепенно во время движения происходит их уточнение, что в конечном итоге с учетом скорректированных значений относительных координат обеспечивает повышенную точность определения координат объекта.
Определение в предлагаемом способе на участках пути заданной длины приращений координат с помощью автономной навигационной системы и приемника спутниковой системы, по которым определяют корректирующие коэффициенты, с учетом которых в каждом рабочем цикле проводят коррекцию угла направления движения и приращения пути, обеспечивает повышенную точность определения угла направления движения и приращений пути. В сравнении с известным способом, который требует периодической коррекции указанных параметров на контрольном участке, предлагаемый способ обеспечивает непрерывную коррекцию поправки направления и коэффициента пути во время движения объекта. В конечном итоге это приводит к повышению точности определения координат местоположения объекта и упрощению порядка проведения калибровки.
Введение в известное устройство приемника спутниковой навигационной системы, второго сумматора и блока коррекции обеспечивает повышенную точность определения координат объекта в сравнении с известным устройством. Это достигается за счет обеспечения возможности коррекции относительных координат и координат начальной точки по информации, поступающей от приемника спутниковой навигационной системы. Кроме повышения точности следует отметить более высокую устойчивость работы предлагаемого устройства, особенно в условиях воздействия помех, например в районах магнитных аномалий, в зонах неустойчивого приема сигналов спутниковой навигационной системы и т.п. Приемник спутниковой навигационной системы обеспечивает также начальную привязку без участия оператора.
Введение в известное устройство второго блока расчета приращений координат, блока расчета корректирующих коэффициентов, блока умножения обеспечивает проведение коррекции угла направления движения и приращений пути, что в конечном итоге обеспечивает повышенную точность определения координат объекта. Кроме этого, это упрощает порядок проведения калибровки, т.к. указанные параметры определяются автоматически, без участия оператора, в процессе движения объекта.
Все это обеспечивает решение задачи, на которое направлено заявляемое изобретение.
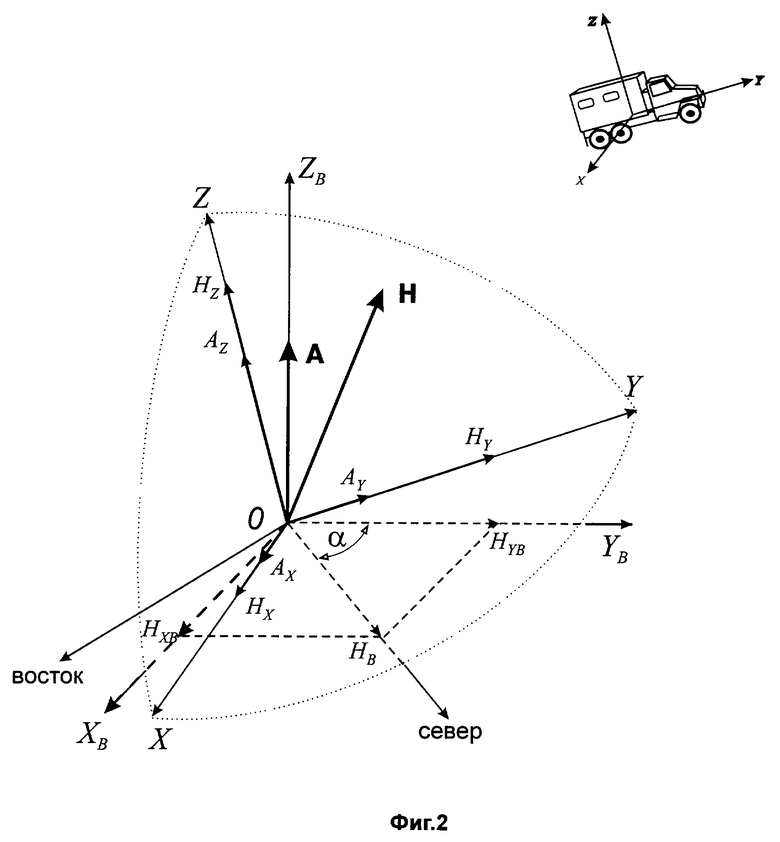
На фиг. 2 представлена система координат подвижного объекта, на фиг.3 - структурная схема устройства для определения местоположения подвижных объектов.
Предлагаемый способ заключается в следующем.
С помощью датчиков вертикали (трех датчиков линейного ускорения) и трех датчиков магнитного поля проводится измерение значений проекций АX, АY, АZ ускорения силы тяжести и значений проекций HX, HY, HZ суммарного вектора напряженности МПЗ и паразитного магнитного поля подвижного объекта по трем взаимно ортогональным направлениям на оси приборной системы координат. Определим приборную систему координат OXYZ (фиг.2) следующим образом: ось OY направим вдоль продольной оси подвижного объекта в направлении движения, ось OZ - вдоль вертикальной оси объекта, а ось ОХ - вдоль поперечной оси объекта. Введем горизонтальную систему координат ОXBYBZB следующим образом: ось OZB направим вертикально вверх, ось ОYB - в направлении движения в горизонтальной плоскости, ось ОХB - перпендикулярно направлению движения. В этом случае горизонтальные проекции НXB, НYB вектора магнитного поля в системе координат OXBYBZB определяются в соответствии с выражениями
где 

В идеальном случае при отсутствии паразитных магнитных полей значения НXB, HYB, определенные в соответствии с (1), могут быть использованы для определения азимутального угла направления движения. На практике идеальный магнитный годограф горизонтальной составляющей магнитного поля, имеющий форму окружности, смещен относительно начала координат из-за постоянного магнитного поля, создаваемого подвижным объектом, и принимает форму эллипса из-за индуцированного магнитного поля, формируемого подвижным объектом. Таким образом, в реальной ситуации множество значений Hi XB, Hi YB, определенных в соответствии с (1), принимают форму эллипса, оси которого, в общем случае, не параллельны осям чувствительности датчиков, и, следовательно, необходимо провести преобразование координат, которые переводили бы эллипс в окружность. На практике для подвижных объектов угол поворота осей эллипса, особенно при расположении датчиков на внешней части корпуса объекта в продольной плоскости симметрии, можно не учитывать.
В калибровочном цикле предварительно измеряют значения магнитного поля в четырех точках эллипса магнитного годографа горизонтальной составляющей магнитного поля, соответствующих направлениям 0, 90, 180 и 270 градусов, - Hmax XB, Hmin XB, Hmax YB, Hmin YB. Кроме этого, измеряют значение вертикальной проекции НZB.
По этим значениям определяют смещение центра эллипса и полуоси эллипса годографа горизонтальной составляющей магнитного поля из выражений
δHX=(Hmax XB+Hmin XB)/2,
δHY=(Hmax YB+Hmin YB)/2,
δHZ=HZB-HZO,
a=(Hmax XB-Hmin XB)/2,
b=(Hmax YB-Hmin YB)/2,
где НZO - значение вертикальной составляющей напряженности МПЗ для данного района. НZO может быть определена с помощью магнитных карт или измерена (при отсутствии паразитных магнитных полей).
Определенные в калибровочном цикле корректирующие коэффициенты магнитного поля δНX, δНY, δHZ, a, b хранятся в запоминающем устройстве и используются в каждом цикле для коррекции (учета) паразитного магнитного поля, создаваемого подвижным объектом.
Движение транспортного средства характеризуется наличием вибраций в широком диапазоне частот, которые воздействуют на датчики магнитного поля и линейного ускорения, что приводит к снижению точности измерения. Поэтому в каждом цикле измерения проводят усреднение в течение 0,1...2,0 с измеряемых значений магнитного поля и ускорения и затем, с учетом корректирующих коэффициентов, полученных в калибровочном цикле, проводят коррекцию измеренных значений путем учета смещения центра эллипса магнитного годографа и сжатия его осей
H'Z=HZ-δHZ.
Скорректированные значения Н'X, Н'Y, Н'Z используют для расчета горизонтальных проекций магнитного поля Земли в соответствии с (1).
В каждом рабочем цикле определяют приращения δХ, δY прямоугольных координат
где δS - приращение пройденного пути за рабочий цикл; - горизонтальная составляющая МПЗ;
- горизонтальная составляющая МПЗ; - косинус угла наклона подвижного объекта в продольной плоскости,
- косинус угла наклона подвижного объекта в продольной плоскости,
Δα - поправка направления.
Определяют относительные координаты ΔХ, ΔY объекта
Значения прямоугольных координат Х, Y подвижного объекта определяют из выражений
где XO, YO - координаты начальной точки.
Магнитный азимут αm направления движения может быть определен по значениям горизонтальных проекций МПЗ следующим образом:
Для определения дирекционного угла α направления движения необходимо учесть поправку направления Δα
α = αm+Δα. (8)
Погрешность определения координат автономной навигационной системой (ΔSA) складывается из путевой и угловой составляющих. В обоих случаях ошибку следует считать систематической, линейно увеличивающейся на каждом шаге вычислений. При нормальной работе навигационной системы величина ΔSA принимается равной 1,5-2,0% от пути, пройденного в автономном режиме.
Для повышения точности определения координат используется информация, поступающая от приемника спутниковой навигационной системы. Результаты комплексной обработки получаются с использованием калмановской фильтрации элементов вектора состояний автономной навигационной аппаратуры по координатам, поступающим от приемника спутниковой навигационной системы. В соответствии с особенностями работы автономной навигационной системы (непосредственно вычисляются не координаты, а их приращения) в качестве элементов вектора состояния следует выбрать относительные координаты и координаты исходной точки. Кроме того, в число оцениваемых параметров необходимо включить поправку направления Δα и коэффициент пути KS.
В отсутствие радионавигационных сигналов для расчета координат в каждом рабочем цикле используются формулы (4), (5), (6). При получении координат от приемника спутниковой навигационной системы рассчитанные ранее относительные координаты и координаты начальной точки уточняются в соответствии с формулами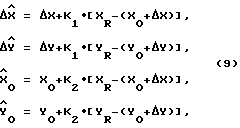
где ΔХ, ΔY - относительные координаты,
XO, YO - координаты начальной точки;
XR, YR - координаты, измеренные приемником спутниковой навигационной системы,
символом^ обозначена оценка соответствующей величины с учетом координат ХR, YR.
Элементы К1, К2 матрицы усиления вычисляются следующим образом: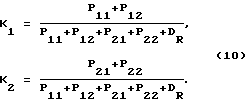
Здесь Pij - элементы корреляционной матрицы Р ошибок экстраполяции, которая обновляется при поступлении координат ХR, YR в соответствии с формулой
Дисперсия DA приращений координат, измеренных автономной системой, в период между последними двумя посылками от приемника спутниковой навигационной системы определяется как (ΔSA)2, после чего величина ΔSA обнуляется. В процессе фильтрации элементы Р21 и Р22 матрицы Р постепенно уменьшаются, что приводит к соответствующему уменьшению параметра К2. В результате спустя некоторое время оценка координат начальной точки практически не меняется и можно ограничиться лишь фильтрацией приращений координат.
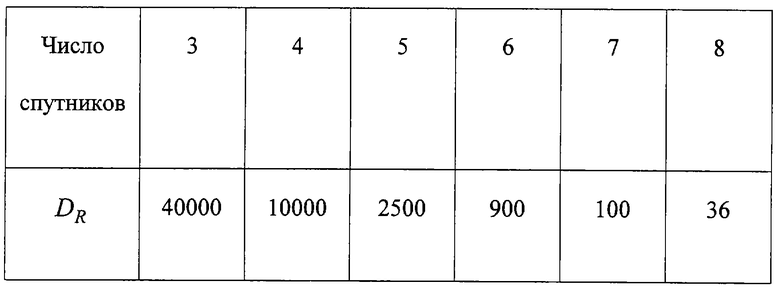
Учитывая, что точность определения координат приемником спутниковой навигационной системы явно не зависит от времени, следует считать, что соответствующая ошибка имеет некоррелированный случайный характер с дисперсией DR, зависящей от геометрического фактора выбранного созвездия спутников. О величине DR можно судить также по количеству спутников, находящихся в зоне радиовидимости. Для системы GPS ориентировочно можно руководствоваться таблицей (см. в конце описания).
Для вычислений по формуле (11) необходимо задать матрицу Р в начальный момент времени. Начальное значение Р=Р0 определяется величиной дисперсии d0 координат начальной точки в момент старта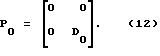
Эта дисперсия зависит от условий начала движения. Если при включении аппаратуры начальная точка не вводится оператором с пульта, а вычисляется в процессе движения по показаниям спутниковой навигационной системы, то значение d0 должно быть выбрано достаточно большим, например 1020 (процесс фильтрации слабо зависит от конкретной величины этого параметра). Если же начальные координаты X0, Y0 вводятся оператором, то величина D0 определяется возможной ошибкой при этом. По умолчанию в этом случае она может быть выбрана в диапазоне 102÷104, что соответствует ошибке ввода координат начальной точки от 10 до 100 м.
Если сигналы от приемника спутниковой навигационной системы не поступают, координаты рассчитываются автономной навигационной системой в соответствии с (4), (5), (6) с постепенным накоплением ошибок ΔSA. При поступлении координат ХR, YR от спутниковой системы, даже после длительного периода работы в автономном режиме, как следует из (9)-(11), происходит довольно быстрое уточнение относительных координат ΔХ, ΔY и координат начальной точки X0, Y0, скорректированные значения которых используются в (5), (6) для последующих расчетов координат объекта. При дальнейшей совместной работе автономной и спутниковой навигационных систем фактически осуществляется сглаживание в динамическом режиме измеряемых координат, тем самым делая их более точными. Отдельные заведомо ложные грубые скачки координат, поступающие от спутниковой системы, в таком режиме будут просто отброшены. Собственная же ошибка автономной навигационной системы в этом случае (за время нескольких рабочих циклов) является совсем незначительной.
Погрешности определения координат при длительной работе аппаратуры в автономном режиме (при отсутствии приема координат от спутниковой системы) в основном зависят от ошибок измерения приращений пройденного пути и угла направления движения. Информация от приемника спутниковой навигационной системы позволяет проводить непрерывную коррекцию этих параметров во время движения. Для этого на участке пути определяют приращения координат, измеренных автономной навигационной системой и приемником спутниковой навигационной системы. Длина участка, на котором проводится сравнение приращений координат, должна значительно превышать ошибку измерений координат спутниковой навигационной системой и составлять не менее 200 м. Обозначим LA и LR расстояния между первой и последней точками участка, полученные по результатам измерений автономной и спутниковой навигационных систем. Если разность расстояний LA и LR по абсолютной величине не превосходит возможной ошибки (3-5% от длины участка), то проводят уточнение на n-м шаге корректирующих коэффициентов автономной системы - коэффициента пути KS и поправки направления Δα по формулам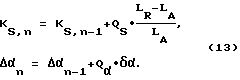
Здесь δα - угол между направлениями от первой до последней точек участка соответственно для измерений спутниковой и автономной навигационных систем. Параметры фильтрации QS и Qα выбирают из диапазона 0,001...0,01.
В каждом рабочем цикле определяют приращение δS пути и угол α направления движения в соответствии с выражениями
где δW - показания датчика перемещения.
Таким образом, в процессе движения производится автоматическая, без участия оператора, плавная коррекция приращений пути и поправки направления, значения которых используются в выражениях (4) и (8).
Использование скорректированных в соответствии с (13) и (14) параметров повышает точность работы автономной навигационной системы, особенно при последующей работе в автономном режиме (при прекращении приема сигналов спутниковой навигационной системы).
Устройство для определения местоположения подвижных объектов представлено на фиг.3 и содержит три датчика магнитного поля 1, три датчика линейного ускорения 2 (датчики вертикали), блок преобразования и усреднения 3, блок расчета горизонтальных проекций МПЗ 4, блок управления 5, датчик перемещения 6, блок расчета угла 7, первый блок расчета приращений координат 8, первый сумматор 9, выходы датчиков магнитного поля 1 и датчиков линейного ускорения 2 соединены соответственно с первыми и вторыми входами блока преобразования и усреднения 3, выходы которого соединены с первыми входами блока расчета горизонтальных проекций МПЗ 4, выходы которого соединены с первыми входами первого блока расчета приращений координат 8 и первыми входами блока расчета угла 7, выходы которого соединены с первыми входами блока управления 5, первые и вторые выходы которого соединены соответственно со вторыми входами блока расчета горизонтальных проекций МПЗ 4 и третьими входами блока преобразования и усреднения 3, выходы первого сумматора 9 соединены со вторыми входами блока управления 5.
Устройство содержит также второй блок расчета приращений координат 10, блок коррекции 11, блок расчета корректирующих коэффициентов 12, блок умножения 13, второй сумматор 14 и приемник спутниковой навигационной системы 15, выходы которого соединены с первыми входами блока коррекции 11 и первыми входами второго блока расчета приращений координат 10, вторые входы которого соединены с выходами первого блока расчета приращений координат 8 и первыми входами второго сумматора 14, а выходы второго блока расчета приращений координат 10 соединены с первыми входами блока расчета корректирующих коэффициентов 12, первые выходы которого соединены с первыми входами блока умножения 13, вторые входы которого соединены с выходами датчика перемещения 6, а выходы блока умножения 13 соединены со вторыми входами блока коррекции 11 и со вторыми входами первого блока расчета приращений координат 8, третьи входы которого соединены со вторыми входами блока расчета угла 7 и вторыми выходами блока расчета корректирующих коэффициентов 12, вторые входы которого соединены с третьими выходами блока управления 5, четвертые выходы которого соединены с третьими входами блока коррекции 11, четвертые входы которого соединены с выходами второго сумматора 14, а первые и вторые выходы блока коррекции соединены соответственно с входами первого сумматора и вторыми входами второго сумматора.
Кроме этого, на фиг.3 показаны пульт управления 16 и блок индикации 17. Работа устройства основана на комплексной обработке информации, поступающей от автономной навигационной системы магнитного типа и приемника спутниковой навигационной системы, входящих в состав устройства.
При отсутствии приема сигналов спутниковой навигационной системы в исходной точке маршрута движения оператор с пульта управления 16 вводит в блок управления 5 исходные данные: координаты начальной точки X0, Y0 и значение магнитного склонения (поправки направления Δα) для данной местности, которые поступают соответственно на третьи входы блока коррекции 11 и вторые входы блока расчета корректирующих коэффициентов 12. В режиме измерения три ортогонально расположенных датчика магнитного поля 1 и три датчика линейного ускорения 2 непрерывно формируют на своих выходах аналоговые сигналы, пропорциональные значениям проекций НX, НY, НZ магнитного поля и проекций АX, АY, АZ ускорения силы тяжести на оси приборной системы координат OXYZ (фиг. 2). Аналоговые сигналы датчиков поступают на первые и вторые входы блока преобразования и усреднения 3, который обеспечивает преобразование аналоговых сигналов в цифровой код и их усреднение в каждом рабочем цикле за период 0,1. ..2,0 с. Длительность периода усреднения сигналов датчиков определяется блоком управления 5 по информации, поступающей с его вторых выходов на третьи входы блока преобразования и усреднения 3.
Усредненные значения АX, АY, АZ, НX, НY, НZ поступают на блок расчета горизонтальных проекций МПЗ 4, в котором проводится коррекция значений НX, НY, НZ в соответствии с (3) с учетом коэффициентов коррекции, полученных в калибровочном цикле.
По скорректированным значениям Н'X, Н'Y, Н'Z и значениям АX, АY, АZ блок расчета горизонтальных проекций МПЗ 4 в соответствии с (1) проводит расчет горизонтальных проекций МПЗ НXB, НYB, которые поступают на первые входы первого блока расчета приращений координат 8. Первый блок расчета приращений координат 8 по значениям HXB, НYB и по значению приращения пройденного пути δS, поступающим на его вторые входы с датчика перемещения через блок умножения 13, и с учетом поправки направления Δα, поступающей с третьих выходов блока управления через блок расчета корректирующих коэффициентов 12 на его третьи входы, проводит расчет приращений координат в соответствии с (4). Блок умножения обеспечивает определение приращений пройденного пути δS за каждый рабочий цикл в соответствии с (14). Коэффициент пути KS, используемый в (14), зависит от типа транспортного средства, характера местности и т.п. Начальное значение КS= 1 хранится в блоке умножения и уточняется при поступлении координат от приемника спутниковой навигационной системы 15.
Второй сумматор 14 по значениям приращений координат, измеренных в каждом рабочем цикле, определяет относительные координаты ΔХ, ΔY в соответствии с (5), которые поступают на четвертые входы блока коррекции 11, на третьи входы которого поступают с выходов блока управления 5 значения координат начальной точки X0, Y0. При отсутствии приема сигналов спутниковой навигационной системы значения относительных координат и координат начальной точки без изменений через блок коррекции 11 поступают на первый сумматор 9, который обеспечивает определение координат объекта в соответствии с (6) и выдачу этих значений на блок управления 5.
Кроме этого, в каждом рабочем цикле блок расчета угла 7 по значениям горизонтальных проекций HXB, HYB, поступающих на его первые входы, и значению поправки направления Δα, поступающей с блока управления 5 через блок расчета корректирующих коэффициентов 12, проводит в соответствии с (7) и (8) расчет дирекционного угла α направления движения, значение которого поступает на первые входы блока управления 5. Блок индикации 18 предназначен для визуального отображения измеряемых параметров.
Предварительно, до начала режима навигационных измерений, проводится калибровочный цикл, в котором измеряют значения горизонтальных проекций магнитного поля НXB, НYB в четырех ориентациях объекта, соответствующих направлениям 0, 90, 180 и 270 градусов. Кроме этого, измеряют значение вертикальной проекции НZB. По измеренным значениям блок расчета горизонтальных проекций МПЗ обеспечивает определение коэффициентов коррекции магнитного поля в соответствии с (2). Команда на проведение коррекции поступает с первых выходов блока управления 5 на вторые входы блока расчета горизонтальных проекций 4.
Ошибка определения координат в рассмотренном выше случае складывается из путевой и угловой составляющих и линейно увеличивается на каждом шаге вычислений, т. е. при работе в автономном режиме требуется коррекция измеряемых координат. В предлагаемом устройстве обеспечивается автоматическая коррекция координат с помощью приемника спутниковой навигационной системы 15, входящего в состав устройства. В зонах, в которых обеспечивается прием сигналов спутниковой навигационной системы, при поступлении координат ХR, YR от приемника 15 рассчитанные ранее в соответствии с (5) относительные координаты ΔX, ΔY и введенные оператором координаты начальной точки X0, Y0 уточняются в блоке коррекции 11 в соответствии с (9). Такая коррекция осуществляется постепенно, при каждом поступлении значений ХR, YR, при этом скорость уточнения координат, как следует из (9), зависит от достоверности измеряемых координат автономной навигационной системой и приемником спутниковой навигационной системы, входящих в состав устройства.
Дисперсия значений DR определяется блоком коррекции 11 в зависимости от геометрического фактора и(или) от количества спутников, находящихся в зоне радиовидимости. Информация о геометрическом факторе и количестве спутников поступает совместно с координатами ХR, YR на блок коррекции 11 с приемника спутниковой навигационной системы 15. Дисперсия DA автономных координат определяется блоком коррекции 11 как (ΔSA)2 по величине пройденного пути в период между двумя последними измерениями координат с помощью приемника спутниковой навигационной системы 15. Информация о приращениях пути за каждый рабочий цикл поступает на вторые входы блока коррекции 11 с выходов блока умножения 13.
Скорректированные значения координат начальной точки Х0, Y0 сохраняются в блоке коррекции 11, а скорректированные значения относительных координат ΔХ, ΔY поступают с его вторых выходов на вторые входы второго сумматора и используются в соответствии с (5), (6) в последующих рабочих циклах.
В общем случае для работы устройства не требуется ввод координат X0, Y0 начальной точки. В этом случае в качестве координат начальной точки используются первые значения XR, YR, поступившие от приемника 15, которые в дальнейшем уточняются в соответствии с (9).
Устройство обеспечивает проведение коррекции параметров автономной навигационной системы. Начальное значение КS=1 хранится в блоке умножения 13. Значение поправки направления Δα при необходимости вводится оператором с помощью пульта управления 16 через блок управления 5 в блок расчета корректирующих коэффициентов 12. Указанные значения уточняются в процессе измерений. При поступлении от приемника спутниковой навигационной системы 15 координат ХR, YR они фиксируются во втором блоке расчета приращений координат 10, который, начиная с этого момента времени, обеспечивает на участке пути величиной не менее 200 м определение приращений координат путем суммирования приращений координат, измеренных в каждом рабочем цикле первым блоком расчета приращений координат 8. После того как хотя бы одно из приращений координат на данном участке превысит 200 м, то при поступлении с приемника 15 очередных значений ХR, YR они фиксируются во втором блоке расчета приращений координат 10. Таким образом, второй блок расчета приращений координат 10 обеспечивает определение приращений координат, измеренных с помощью автономной навигационной системы и приемника спутниковой навигационной системы. Эти приращения поступают на блок расчета корректирующих коэффициентов 12, по которым вначале определяются LR и LA - расстояния между первой и последней точками участка, и δα - угол между направлениями от первой до последней точки участка, полученные по результатам измерений автономной и спутниковой навигационных систем. Затем в соответствии с (13) уточняются значения KS и Δα, которые поступают соответственно на первые входы блока умножения 13 и третьи входы первого блока расчета приращений координат 8. Кроме этого, значение Δα поступает на второй вход блока расчета угла 7. Скорректированные значения коэффициентов используются в соответствии с (14) и (4) для расчета приращений координат и угла направления движения в последующих рабочих циклах. Циклы коррекции повторяются аналогичным образом на последующих участках. Это обеспечивает плавную коррекцию коэффициента пути KS и поправки направления Δα при изменении условий движения и магнитного склонения. Следует отметить, что при такой коррекции в значении поправки направления Δα учитывается также ошибка установки датчиков на подвижном объекте - рассогласование по углу измерительной оси датчиков и продольной оси объекта. Все это обеспечивает повышенную точность работы автономной навигационной системы, особенно после прекращения приема сигналов спутниковой навигационной системы.
В предлагаемом устройстве вновь введенные блоки - второй блок расчета приращений координат 10, блок коррекции 11, блок расчета корректирующих коэффициентов 12, блок умножения 13, второй сумматор 14 могут быть выполнены на основе однокристальной ОЭВМ типа 1821ВМ85.
Технический результат от использования предлагаемого способа и устройства заключается в повышении достоверности и точности измерения координат подвижного объекта и угла направления движения, особенно в условиях воздействия внешних паразитных магнитных полей, например, при движении в районах магнитных аномалий. При этом ошибки определения координат не возрастают с течением времени. В общем случае в предлагаемом способе и устройстве достигается точность определения координат подвижного объекта выше, чем точность любой из используемых навигационных систем - автономной или спутниковой. Кроме этого, предлагаемый способ и устройство позволяют упростить порядок начальной привязки и калибровки путем проведения определения в автоматическом режиме координат начальной точки и коррекции настраиваемых параметров навигационной системы - коэффициента пути и поправки направления.
Все это позволяет расширить область применения способа и устройства.
Наиболее успешно предлагаемый способ и устройство могут быть использованы в навигационной аппаратуре для транспортных средств.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2443978C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2395061C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2010 |
|
RU2436045C1 |
| СПОСОБ КОНТРОЛЯ МАРШРУТОВ СЛЕДОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2001 |
|
RU2194250C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2098764C1 |
| КОМПЛЕКСНАЯ АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ | 2001 |
|
RU2195632C2 |
| НАВИГАЦИОННЫЙ ПРИБОР | 1999 |
|
RU2160431C2 |
| КОМПЛЕКСНАЯ СПУТНИКОВАЯ НАВИГАЦИОННАЯ АППАРАТУРА | 2005 |
|
RU2294527C1 |
| Комплексный способ навигации летательных аппаратов | 2016 |
|
RU2646957C1 |
| Способ определения и компенсации девиации магнитометрических датчиков и устройство для его осуществления | 2015 |
|
RU2607305C1 |
Способ и устройство предназначены для определения координат подвижных наземных объектов, легких летательных аппаратов, катеров, яхт. Способ включает измерение в калибровочном цикле контрольных значений горизонтальных проекций суммарного вектора напряженности магнитного поля Земли и магнитного поля объекта, измерение за время рабочего цикла усредненных значений проекций ускорения силы тяжести и проекций суммарного вектора напряженности поля Земли и магнитного поля объекта. С учетом коэффициентов коррекции определяют значения горизонтальных проекций вектора напряженности поля Земли. Определяют угол направления движения. Определяют приращения координат за время рабочего цикла. Определяют относительные координаты суммированием приращений координат. Определяют координаты объекта суммированием относительных координат и координат начальной точки. Измеряют с помощью приемника спутниковой навигационной системы координаты объекта, с учетом которых проводят коррекцию относительных координат и координат начальной точки. Определяют корректирующие коэффициенты, с учетом которых в каждом рабочем цикле проводят коррекцию угла направления движения и приращения пути. Обеспечивается повышение точности измерения направления движения и координат объекта и упрощение калибровки устройства. 2 с. и 2 з.п. ф-лы, 3 ил., 1 табл.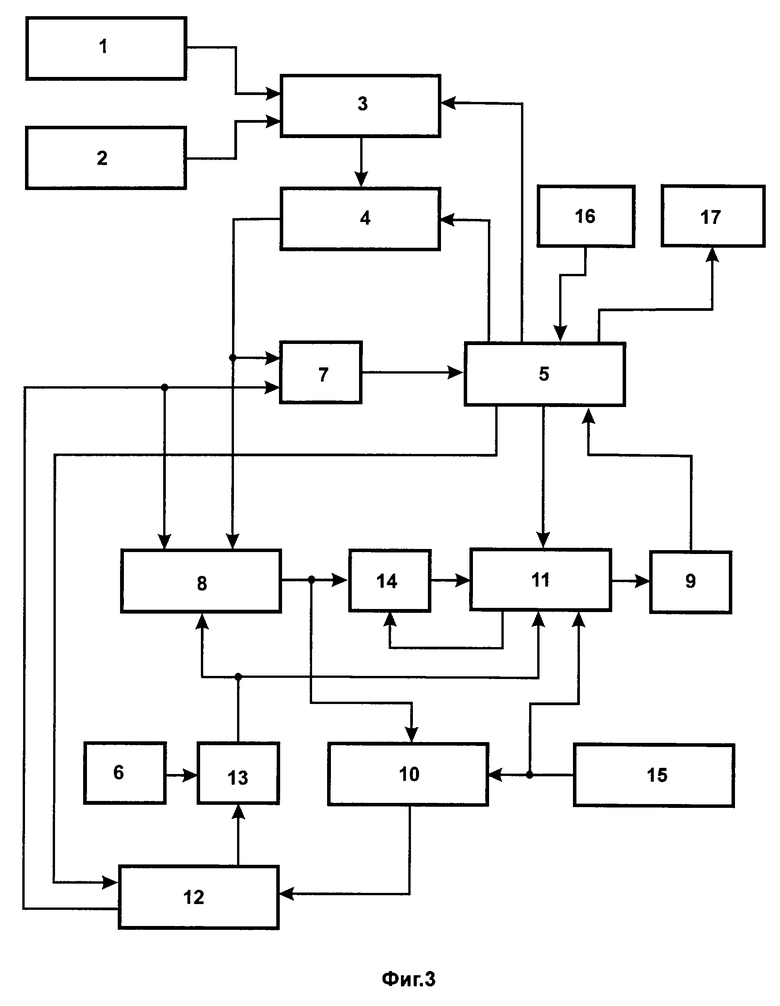




где ΔХ, ΔY - относительные координаты;
Х0, Y0 - координаты начальной точки;
XR, YR - координаты, измеренные приемником спутниковой навигационной системы;
символом^ обозначена оценка соответствующей величины с учетом координат ХR, YR;
К1, К2 - элементы матрицы усиления, определяемые из выражений
где Pij - элементы корреляционной матрицы Р ошибок экстраполяции, которая обновляется при поступлении координат в соответствии с выражением
при начальном значении
где DA - ожидаемая дисперсия приращений координат, измеряемых автономной навигационной системой в период между двумя последними измерениями координат с помощью приемника спутниковой навигационной системы;
D0 - ожидаемая дисперсия координат начальной точки в начальный момент времени;
DR - ожидаемая дисперсия координат, измеряемых приемником спутниковой навигационной системы.
Δαn ==Δαn-1+Qα•δα,
где параметры фильтрации QS и  выбирают из диапазона 0,001...0,01,
выбирают из диапазона 0,001...0,01,
определяют в каждом рабочем цикле приращение δS пути и угол α направления движения в соответствии с выражениями
δS = KS•δW,
α = αm+Δα,
где δW - показания датчика перемещения;
αm - магнитный азимут направления движения.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2098764C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2077028C1 |
| Способ прикрепления лезвий к орудиям для обработки почвы | 1929 |
|
SU15604A1 |
| US 3630079, 28.12.1971. | |||

