Изобретение относится к способу управления коммутационным узлом, управляющим устройствам, программным модулям, а также коммутационному узлу и системе коммутации.
В системах коммутации известны два основных типа систем управления - централизованная и децентрализованная. Изобретение исходит как из одного, так и из другого типа систем коммутации.
В статье "Система 12 - структура системы" из журнала "Электришес нахрихтенвезен", т. 56, N 2/3, 1989 г., авторы Б. Бонами и др., описана, например, система коммутации с децентрализованной системой управления.
Коммутационный узел состоит при этом из множества вычислительных модулей и цифровой сети связи, которая служит как для речевых соединений между абонентами, так и для связи между вычислительными модулями. Задачи управления распределяются при этом на множество равноправных и однородных вычислительных модулей, взаимодействующих между собой для осуществления коммутационных функций.
Далее, например, в статье "Электронная цифровая система коммутации завтра - коммуникация с надежным будущим" из журнала "Тельком рипорт", т. 11, N 6, 1988 г. , автор Ник Скаперда, описан коммутационный узел с центральной системой управления. Коммутационный узел здесь также содержит цифровую сеть связи, к которой абоненты присоединены через абонентские вводы или присоединительные группы, выполняющие часть функций управления. Центральные функции управления осуществляются координационным процессором, который представляет собой многопроцессорную систему, работающую в реальном масштабе времени и снабженную базовым процессором для О&М-функций (О&М = Operation & Maintenance [работа и поддержка]), варьируемым числом коммутационных процессоров и общей памятью.
В обоих типах систем управления есть проблема, заключающаяся в том, что осуществляемые ими функции становятся все более комплексными (сложными), поскольку требуемые от коммутационного узла мощности постоянно растут. Это требует, во-первых, все больших затрат на разработку и строительство новых поколений коммутационных узлов, во-вторых, возрастают также требования к производительности вычислительных машин в коммутационных узлах. Это привело, например, у описанной выше системы коммутации с центральной системой управления к использованию многопроцессорной системы, с помощью которой можно разнообразно покрывать растущую потребность в емкости реального времени.
В основе изобретения лежит задача уменьшения затрат на управление системами коммутации.
Задача решается посредством способа согласно отличительной части п. 1 формулы, управляющих устройств согласно отличительным частям п.п. 7 и 9, программных модулей согласно отличительным частям п.п. 8 и 10, а также коммутационного узла и системы коммутации согласно отличительной части п. 11 и 14 соответственно.
В основе изобретения лежит тот факт, что затраты на разработку и тестирование управляющих программ, реализуемых в реальном масштабе времени, значительно выше, чем реализуемых в нереальном масштабе времени.
Основная мысль изобретения заключается в том, что для осуществления коммутационных функций между собой взаимодействуют два управляющих устройства, одно из которых посредством управляющих программ, реализуемых в реальном масштабе времени, выполняет стандартные коммутационные задачи, а другое посредством управляющих программ, реализуемых в нереальном масштабе времени, выполняет прочие коммутационные задачи. За счет этого для выполнения различных типов задач реализуются различные соответствующие управляющие программы.
Предпочтительные усовершенствования изобретения приведены в зависимых пунктах формулы.
Изобретение имеет то преимущество, что уменьшается сложность управляющих программ, поскольку для выполнения различных типов задач реализуются соответствующие управляющие программы. Это сокращает затраты как на тестирование и разработку, так и на затраты в отношении производительности вычислительной машины.
Другое преимущество изобретения в том, что выполнение стандартных коммутационных задач не зависит от мощности. Благодаря этому можно разделить циклы разработок этих обоих участков, что является предпочтительным, поскольку циклы разработок для стандартных коммутационных задач длиннее, чем для мощности (коммутационного узла).
Еще одно преимущество изобретения в том, что между обоими управляющими устройствами может быть предусмотрен центральный интерфейс, что обеспечивает возможность создания открытой системы.
Ниже изобретение более подробно поясняется с помощью примера его осуществления со ссылкой на прилагаемые чертежи, которые представляют:
- фиг. 1: блок-схему системы управления для коммутационного узла согласно изобретению;
- фиг. 2: блок-схему структуры системы коммутации согласно изобретению с коммутационным узлом согласно изобретению на фиг. 1.
В примере исполнения описано применение способа согласно изобретению в коммутационном узле согласно изобретению, который является частью системы коммутации согласно изобретению и содержит управляющие устройства согласно изобретению, управляемые программными модулями согласно изобретению.
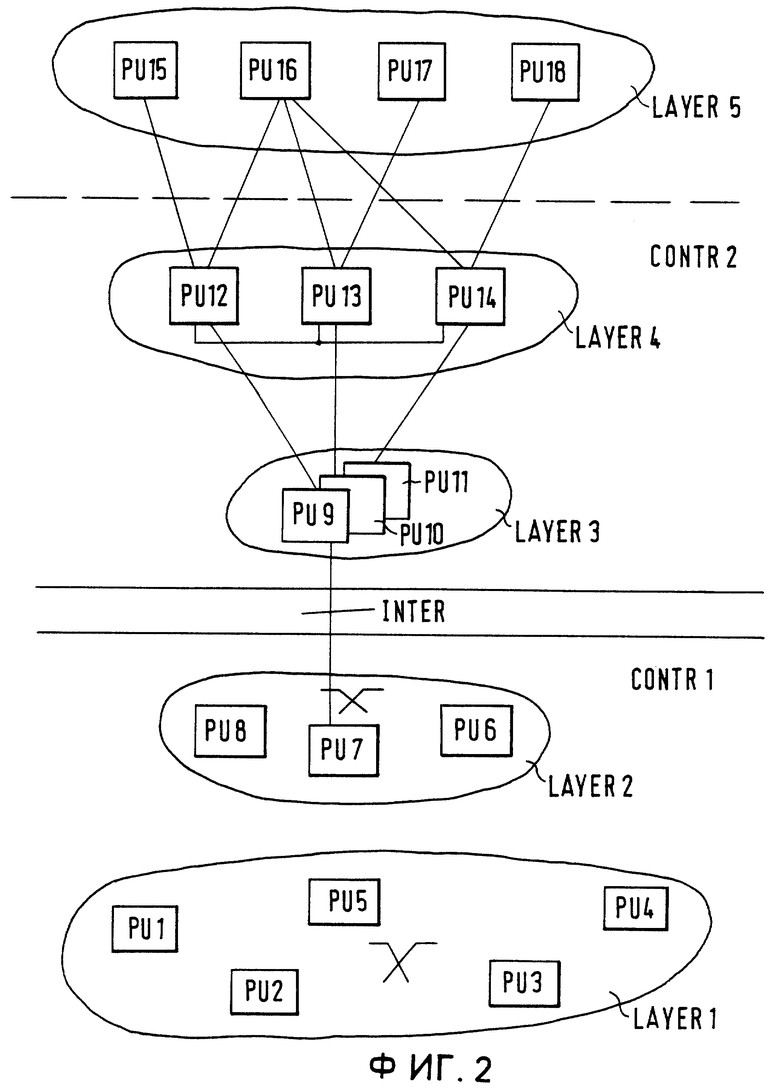
На фиг. 1 изображена система управления системы коммутации согласно изобретению. Система управления содержит два управляющих устройства CONTR1 и CONTR2, обменивающихся между собой данными. Коммутационный узел содержит как эти системы, так и сети связи.
Система управления содержит два управляющих устройства CONTR1 и CONTR2, которые обмениваются данными через интерфейс INTER. Интерфейс INTER является центральным логическим интерфейсом, через которой осуществляется связь между управляющими устройствами CONTR1 и CONTR2 (см. фиг.1 и п.1 формулы).
Каждый из вычислительных модулей M1-M8 состоит из вычислительной машины и периферийных компонентов, которые, помимо прочего, обеспечивают обмен данными с другими вычислительными модулями через сеть связи KN. Вычислительный модуль M7 содержит дополнительные периферийные компоненты, обеспечивающие обмен данными а управляющим устройством CONTR2. Каждый из вычислительных модулей М1-М8, которым управляет одна или несколько управляющих программ, реализуемых в реальном масштабе времени, выполняет по отдельности или вместе основные коммутационные задачи в реальном масштабе временя. Подробная конструкция управляющих модулей М1-М8 описана, например, в статье "Структура аппаратных средств", журнал "Электришес нахрихтенвезен", т. 58, N 2/3, 1981 г., стр. 135 - 147, и других статьях из этого тома.
Различие между реализациями управляющей программы в реальном и нереальном масштабах времени известно любому специалисту, см., например, гл. 12.8. "Системы реального времени" из книги Г.-Й. Зигерта "Эксплуатационные системы: введение", серия "Справочник по информатике", выпущенной в 1991 г. издательством Р. Ольденбург Ферлаг Мюнхен/Вена. Этим различием является прежде всего вид используемых эксплуатационных систем и управляющих программ. Так, например, использование концепций программирования, опирающихся на изображение посредством так называемых автоматов состояния, является заметным показателем реализации управляющей программы в реальном масштабе времени.
Сеть связи KN представляет собой цифровую сеть связи, используемую в коммутационном узле также для соединения между абонентами. Можно также использовать собственную сеть связи для обмена данными между вычислительными модулями М1-М8.
Число восемь вычислительных модулей М1-М8 выбрано здесь в качестве примера. Кроме того, возможно также, чтобы управляющее устройство CONTR1 состояло не из множества распределенных вычислительных модулей, а было образовано центральной производительной вычислительной машиной, выполняющей задачи вычислительных модулей М1-М8. Эта вычислительная машина выполняла бы эти задачи также посредством управляющих программ, реализуемых в реальном масштабе времени.
Управляющее устройство CONTR2 образовано центральной вычислительной машиной с периферийными компонентами, которое, помимо прочего, обеспечивают обмен данными с вычислительным модулем М7 и присоединение устройств для связи человека с машиной. Центральная вычислительная машина может выполнять несколько логических процессов. Управляющее устройство CONTR2 выполняет прочие коммутационные задачи посредством управляющих программ, реализуемых в нереальном масштабе времени.
Возможно также, чтобы управляющее устройство CONTR2 было образовано не центральной вычислительной машиной, а несколькими вычислительными машинами, которые соединены между собой через сеть связи и взаимодействуют для выполнения задач управляющего устройства CONTR2.
Для осуществления коммутационных функций оба управляющих устройства CONTR1 и CONTR2 взаимодействуют между собой. Управляющее устройство CONTR1 выполняет основные коммутационные задачи в реальном масштабе времени и прибегает, в случае необходимости, к услугам управляющего устройства CONTR2. Управляющее устройство CONTR2 осуществляет более комплексные коммутационные задачи, выполняя при этом контроль над вычислительными модулями М1-М8.
Распределение различных коммутационных задач по управляющим устройствам CONTR1 и CONTR2 и вид их выполнения показаны на фиг. 2, поясняющей структуру системы коммутации согласно изобретению.
На фиг. 2 изображены пять уровней управления LAYER1-LAYER5.
Уровни управления LAYER1-LAYER5 содержат восемнадцать блоков обработки PU1-PU18. Каждый из этих блоков обработки PU1-PU18 выполняет при этом определенную задачу и представляет, таким образом, либо вычислительный модуль, либо процесс, протекающий в вычислительной машине.
Уровни управления LAYER1 и LAYER2 из CONTR1 и уровни управления LAYER3 и LAYER4 из CONTR2 централизуют задачи в направлении интерфейса INTER и децентрализуют их в направлении от него.
Уровни управления LAYER1 и LAYER2 размещены в управляющем устройстве CONTR1, а уровни управления LAYER3 и LAYER4 - в управляющем устройстве CONTR2. Уровень управления LAYER5 размещен в одной или нескольких, отключенных коммутационным узлом вычислительных системах. Такие вычислительные системы могут предоставлять функции для нескольких коммутационных узлов. Можно также отказаться от уровня управления LAYER5 или разместить его также в управляющем устройстве CONTR2.
Уровень управления LAYER1 содержит блоки обработки PU1- PU5, уровень управления LAYER2 - блоки обработки PU6-PU8, уровень управления LAYER3 - блоки обработки PU9-PU11, уровень управления LAYER4 - блоки обработки PU12-PU14, а уровень управления LAYER5 - блоки обработки PU15-PU18. Блоки обработки PU1-PU8 уровней управления LAYER1 и LAYER2 соединены между собой через цифровую сеть связи. Блок обработки РU7 соединен с блоками обработки PU9-PU11 через интерфейс INTER. Блоки обработки PU9-PU11 уровня управления LAYER3 соединены с блоками обработки PU12-PU14 уровня управления LAYER4. Блоки обработки PU12-PU14 уровня управления LAYER4 соединены между собой и соответственно с блоками обработки PU15 и PU16, PU16 и PU17, а также PU16 и PU18 уровня управления LAYER5.
Блоки обработки PU1-PU5 уровня управления LAYER1 образованы вычислительными модулями М1-М5. Они осуществляют децентрализованные функции, такие как транспортные и служебные функции, в реальном масштабе времени. Это означает, что несколько блоков обработки PU1-PU5 выполняют одновременно одну и ту же задачу.
Блоки обработки PU6-PU8 уровня управления LAYER2 образованы вычислительными модулями М6-М8. Они выполняют частично централизованные задачи, например задачи, касающиеся установления соединения абонентов или сбора данных. Для выполнения этих задач они включаются блоками обработки PU1-PU5 уровня управления LAYER1 и, в свою очередь, воздействуют на эти блоки обработки, управляя ими. При этом возможно, чтобы одна группа блоков обработки уровня управления LAYER1 постоянно соответствовала блоку обработки уровня управления LAYER2 (централизованное управление) или же не соответствовала ему (децентрализованное управление).
Посредством блока обработки PU7 блоки обработки уровня LAYER2 могут быть связаны с блоками обработки PU9-PU11 уровня управления LAYER3 через интерфейс INTER. Возможно также, чтобы несколько блоков обработки были выполнены, как блок обработки PU7, и таким образом связывали блоки обработки уровня управления LAYER2 через несколько соединительных линий идущих через интерфейс INTER, с блоками обработки уровня управления LAYER3.
Блоки обработки PU9-PU11 уровня управления LAYER3 представляют процессы, протекающие в вычислительной машине, на которой базируется управляющее устройство CONTR2. Они получают запросы от уровня управления LAYER2, на котором задачи выполняются в реальном масштабе времени, и от уровня управления LAYER4, на котором выполняются задачи в нереальном масштабе времени. Блоки управления PU9-PU11 обрабатывают эти запросы централизованно и координируют их. Далее оно предоставляет блокам обработки уровня управления LAYER2 и блокам обработки уровня управления LAYER4 служебную информацию, которая позволяет им обмениваться данными. Обмен данными осуществляется при этом, например, посредством механизмов загрузки вверх/вниз. Кроме того, блоки обработки PU9-PU11 воздействуют посредством управляющих команд на блоки обработки уровня управления LAYER2 или передают задания или сообщения блокам обработки уровня управления LAYER4. Уровень управления LAYER3 представляет собой таким образом собственно интерфейс между выполнением задач в реальном масштабе времени, как они выполняются уровнями управления LAYER1 и LAYER2, и выполнением задач в нереальном масштабе времени, как они выполняются уровнями управления LAYER4 и LAYER5.
Блоки обработки PU12-PU14 уровня управления LAYER4 также представляют процессы, протекающие в вычислительной машине, на которой базируется управляющее устройство CONTR2. Они выполняют задачи соответственно по управляющим программам, реализуемым в нереальном масштабе времени, и запускаются блоками обработки уровня управления LAYER3 или уровня управления LAYER5. Блоки управления PU12-PU14 уровня управления LAYER выполняют более комплексные коммутационные задачи, служебные задачи и O&M-задачи (О&М = Operation & Maintenance [работа и поддержка]). Такие задачи касаются, например, мощности интегральной цифровой сети связи, абонентов, центрекс-услуг, регистрации отдельных разговоров, служебных сообщений и применений для передвижной радиосети или "интеллигентных" сетей.
Возможно, чтобы уровень управления LAYER4 был подразделен и состоял из двух или более подуровней. Блоки обработки более высокого подуровня могут при этом предоставлять, например, одному или более блоков обработки более низкого подуровня услуги, а блоки обработки более низкого подуровня могли бы давать частичные задания для обработки таким блокам обработки более высокого подуровня.
Далее возможно, чтобы блоки обработки уровня управления LAYER4 давали частичные задания для обработки блокам обработки уровня управления LAYER5. Эти блоки обработки уровня управления LAYER5 могут при этом находиться наготове также для нескольких блоков обработки уровня управления LAYER4 того же или разных коммутационных узлов.
Предпочтительно осуществлять посредством блоков обработки уровня управления LAYER4 следующие функции:
- функции управления ошибками, например предоставление мониторинга ошибок для коммутационного узла, локализация ошибок, корреляция сигналов тревоги или отображение сигналов тревоги на моделях объектов;
- предварительная и окончательная обработка несрочных данных. Такими данными являются, например, данные измерений, данные о тарифной оплате, данные об абонентах или данные о каналах связи;
- предоставление Q3-адаптера для присоединения к центральной станции управления сетью);
- предоставление и обработка статистических данных;,
- функции по графическому изображению состояния коммутационного узла.
Предпочтительно также осуществление отнесенных к управлению сетью коммутационных функций или частей функций посредством блоков обработки уровня управления LAYER4, если эти функции касаются только локальных данных и механизмов коммутационного узла. Такие функции заключаются, например, в управлении поиском канала или анализом номера, управлении тарифной оплатой и тарификацией, управлении доступом абонента, управлении потоком информационного обмена или управлении общей системой сигнализации. Кроме того, посредством блоков обработки уровня управления LAYER4 можно осуществлять функции, отнесенные к управлению сетью, например управление абонентами или управление переходной сетью, или же функции, касающиеся безопасности системы.
Блоки обработки PU15-PU18 уровня управления LAYER5 предоставляют функции управления для работы коммутационного узла и предлагаемых им услуг. Они выполняют таким образом задачи служебного управления и управления сетью. Для этого они связаны с блоками обработки уровня управления LAYER4, от которых они запрашивают данные или которым они подают управляющие команды. Блоки обработки РU15 и РU16 осуществляют тем самым функции, обычно свойственные центральной станции управления сетью. Таким образом возможно, чтобы блоки обработки PU15-PU18 уровня управления LAYER5 взаимодействовали с несколькими коммутационными узлами системы коммутации или со всеми коммутационными узлами.
Изобретение относится к области обработки информации и может быть использовано в централизованных и децентрализованных системах управления. Техническим результатом является уменьшение затрат на управление системами коммутации. Изобретение основано на выполнении коммутационных задач посредством управляющих программ, реализуемых в реальном и нереальном масштабах времени. 6 с. и 6 з.п.ф- лы, 2 ил.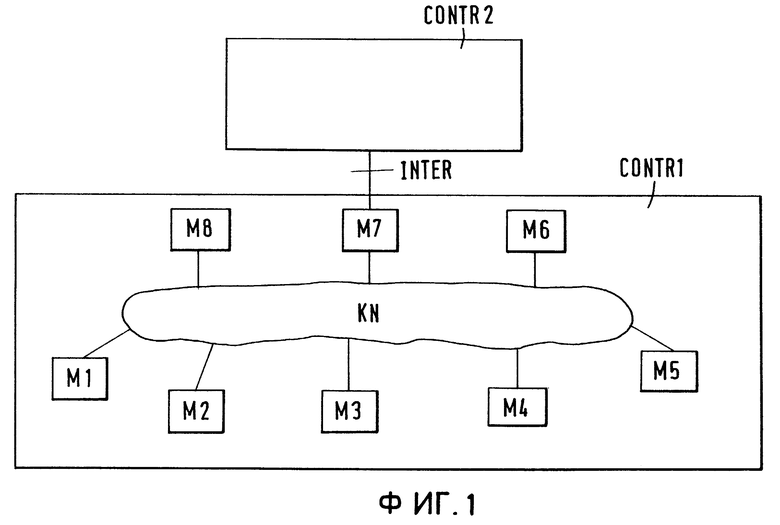
| БОНАМИ Б | |||
| И др | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| ЭЛЕКТРИШЕС НАХРИХТЕНВЕЗЕН | |||
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
| СКАПЕРДА НИК | |||
| Электронная цифровая система коммутации завтра - коммутация с надежным будущим | |||
| ТЕЛЬКОМ РИПОРТ | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Устройство для управления подпрограммами | 1976 |
|
SU634278A1 |
| US 3665416 А, 23.05.1972. | |||
