Изобретение относится к нанотехнологическому оборудованию, а более конкретно к устройствам, обеспечивающим наблюдение, измерение и модификацию поверхности объектов в режиме сканирующего туннельного микроскопа (СТМ) или атомно-силового микроскопа (АСМ). Возможно также использование изобретения в устройствах, где необходимо точно поддерживать расстояние между объектами.
Известен сканирующий зондовый микроскоп, содержащий платформу с держателем зондов, привод и держатель объекта [1].
Недостатки указанного микроскопа заключаются в том, что значительное количество сопрягаемых деталей в цепочке объект-зонд увеличивает нефункциональные перемещения объект-зонд, что уменьшает точность измерения и надежность.
Известен также сканирующий зондовый микроскоп, содержащий платформу, сопряженную с держателем зондов с зондом, анализатором и опорами, сканер с держателем объекта, приводом и направляющими, сочлененными с опорами и блок управления [2].
Недостатки указанного микроскопа заключаются в том, что держатель зондов находится в постоянном соприкосновении с приводом, что увеличивает нефункциональные перемещения зонда относительно объекта и, соответственно, погрешность измерения. Второй недостаток заключается в невозможности при известных направляющих осуществить точный подвод по координатам X, Y зонда к объекту, а также осуществить отвод на расстояние, необходимое для удобной замены зондов и образцов (объектов). Третий недостаток связан с отсутствием закрепления держателя зонда на направляющих, что может привести к нефункциональному смещению зонда относительно объекта и, соответственно, снизить надежность измерения. Четвертый недостаток следует из объединения держателя зонда с анализатором, что усложняет конструкцию, особенно в условиях сверхвысокого вакуума.
Технический результат изобретения заключается в расширении функциональных возможностей, упрощении конструкции, повышении надежности и точности измерения.
Это достигается тем, что в сканирующем зондовом микроскопе, содержащем платформу, сопряженную с держателем зондов с зондом и стойками, анализатор, держатель объекта, установленный на сканере, сопряженном с приводом, держатель зондов снабжен упорами, привод выполнен в виде подвижной каретки с подпружиненными и неподвижными первыми опорами, установленной на плоских и V-образных первых направляющих и снабжен вторыми направляющими в виде двух плоских и одной V-образной с фасками, стойки держателя зондов выполнены в виде трех захватов, один из которых пружинный со вторыми опорами, и установлен на платформе с возможностью подвижки относительно платформы по координатам X, Y, Z и возможностью взаимодействия упорами с платформой, причем захваты сопряжены со вторыми направляющими привода, при этом величины X, Y подвижки держателя зондов больше осевого нефункционального смещения каретки относительно держателя зондов, а величина подвижки по координате Z больше перекоса сопряженных поверхностей платформы и упоров держателя зондов, при этом сила перемещения каретки больше силы трения между захватами и вторыми направляющими, а анализатор установлен на платформе.
На чертеже изображен сканирующий зондовый микроскоп (СЗМ).
СЗМ состоит из платформы 1, на которой установлен анализатор 2 (см. например [2, 3] и держатель 3 с зондом 4. Держатель 3 имеет отверстия 5, сопряженные со штоками 6 с выступами 7, закрепленными в платформе 1. На держателе 3 закреплены два захвата 8 (один не показан) с опорами 9 (вторыми), пружинный захват 10 с опорой 11 (второй) и три упора 12. На платформе 1 закреплены две колонны 13 (одна не показана) и колонна 14 с двумя плоскими направляющими 15 и V-образной направляющей 19 (I направляющие), на которых, в свою очередь, установлена каретка 17 с подпружиненными опорами 18 и неподвижными 16 (первыми), на каретке 17 установлены, также, две плоских 20 и одна V-образная 21 направляющая (II направляющие) с заходами 22 и 23. На каретке 17 закреплен пьезосканер 24 с держателем 25 объекта 26, каретка 17 сопряжена с двигателем 27 (ДШИ-200-1 - воздушный вариант, В23-1 - сверхвысоковакуумный вариант) через передачу 28 (см. например [4]), и толкатель 29 посредством фланца 30. Анализатор 2, пьезосканер 24 и двигатель 27 подключены к блоку управления 31. Блок управления 31 не является предметом изобретения и подробно не раскрыт, аналогичные блоки описаны, например, в [1, 3]. В случае сверхвысоковакуумного использования СЗМ в платформе 1 должно быть установлено разделительное окно 32. Возможно использование также для стабилизации контакта твердых вставок 33.
Опоры 9 и 11 выполнены из материалов с различными коэффициентами трения, с целью выравнивания сил трения, по плоским 20 и V-образной 21 направляющим. Вообще говоря, выравнивать силы трения можно меняя материалы направляющих II, качество обработки сопрягаемых поверхностей, подбирая покрытия и т.п. Каждая V-образная направляющая 19 и 21 представляют собой пару плоских, например, поликоровых пластин, расположенных под углом, например 90o, друг к другу.
Устройство работает следующим образом.
Устанавливают объект 26 на держатель 25, а зонд 4 в держатель 3 (способы закрепления не показаны, это могут быть пружины, клей, припой и т.п.). В случае сверхвысоковакуумного варианта установку осуществляют с помощью сверхвысоковакуумных манипуляторов (см. например [2]). Включают двигатель 27 и осуществляют сближение объекта 26 с зондом 4. При этом начинается перемещение держателя 3 по координатам X, Y и Z относительно платформы 1, т.к. до начала перемещения возможно было нефункциональное смещение каретки 17 относительно держателя 3 по координатам X и Y. При этом держатель 3 оказывается кинематически разомкнутым по координатам X и Y относительно платформы 1. Соответственно перемещение по координате Z, учитывая, что зазор между упорами 12 держателя зондов и сопряженных поверхностей платформы 1 больше перекоса между ними, который возникает при контакте вторых опор 9 и 11 с фланцами 22 и 28 и приводит к размыканию по координате Z. При этом сила перемещения 17, которая может возникать со стороны каретки 17 на захваты 8 и 10 должна быть больше силы трения между захватами 8 и 10 и направляющими 20 и 21. После осуществления контакта опор 9 и 11 с направляющими 20 и 21 и после контакта упоров 12 с платформой 1 (твердыми вставками 33) производят настройку анализатора 2 на зонд 4 (кантилевер, в случае режима АСМ см. [2]), и продолжают сближение. При достижении необходимого зазора объект-зонд происходит остановка двигателя. После этого включают двигатель в обратном направлении до размыкания упоров 12 с платформой 1. Величина размыкания в несколько мкм, что достаточно, обычно на настройку не влияет.
При этом держатель 3 жестко связывается с кареткой 17 и можно производить измерение объекта. Подробнее процесс измерения описан в указанной литературе.
Использование захватов позволяет производить расстыковку системы зонд-объект с приводом, что уменьшает погрешность измерения. Использование первых и вторых направляющих с опорами позволяет осуществлять точный подвод в достаточном диапазоне по координатам X, Y объекта к зонду, что расширяет функциональные возможности. Фиксация держателя зондов захватами увеличивает надежность измерения. Размещение анализатора на платформе упрощает конструкцию и обслуживание СЗМ, особенно в условиях сверхвысокого вакуума.
ЛИТЕРАТУРА
1. G.E.Poirier et.al. A new ultra-high vacuum scanning microscope design for surface science studies. Rev. Sci. lnstrum. 60(10), October 1989, P. 3113-3118.
2. Q. Dai et.al. A variable temperature ultra-high vacuum atomic force microscope. Rev. Sci. Instrum. 66(11), November 1995, p. 5266-5271.
3. Заявка N 96122357/28 (029037), МКИ: H 01 J 37/28, G 11 B 11/08, 1996.
4. Передача с длинными роликами РВПД-12-0,1-20. Вузы России - машиностроению. М., 1993.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПОДВИЖКИ ОБРАЗЦА | 2005 |
|
RU2377620C2 |
| КООРДИНАТНЫЙ СТОЛ | 2004 |
|
RU2254640C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2005 |
|
RU2282257C1 |
| ИНЕРЦИОННЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2008 |
|
RU2465712C2 |
| УСТРОЙСТВО НАГРЕВА ДЛЯ СКАНИРУЮЩИХ ЗОНДОВЫХ МИКРОСКОПОВ | 2001 |
|
RU2218562C2 |
| СВЕРХВЫСОКОВАКУУМНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 1996 |
|
RU2152103C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2010 |
|
RU2498321C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С ЖИДКОСТНОЙ ЯЧЕЙКОЙ | 2001 |
|
RU2210731C2 |
| КООРДИНАТНЫЙ СТОЛ | 2003 |
|
RU2255321C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2012 |
|
RU2572522C2 |
Изобретение относится к нанотехнологическому оборудованию, к устройствам, обеспечивающим наблюдение, измерение и модификацию поверхности объектов в режиме сканирующего туннельного микроскопа (СТМ) или атомно-силового микроскопа (АСМ). Возможно также использование изобретения в устройствах, где необходимо точно поддерживать расстояние между объектами. В сканирующем зондовом микроскопе, содержащем платформу, сопряженную с держателем зондов и со стойками, анализатор, держатель объекта, установленный на сканере, сопряженном с приводом, держатель зондов снабжен упорами, привод выполнен в виде подвижной каретки с подпружиненными и неподвижными первыми опорами, установленной на плоских и V-образных первых направляющих, и снабжен вторыми направляющими в виде двух плоских и одной V-образной с фасками, стойки держателя зондов выполнены в виде трех захватов, один из которых пружинный и содержит вторые опоры, держатель установлен на платформе с возможностью подвижки относительно платформы по координатам X, У, Z и возможностью взаимодействия упорами с платформой, причем захваты сопряжены с вторыми направляющими привода. Подобное выполнение сканирующего зондового микроскопа позволяет расширить функциональные возможности, упростить конструкцию, повысить надежность и точность измерения. 1 ил.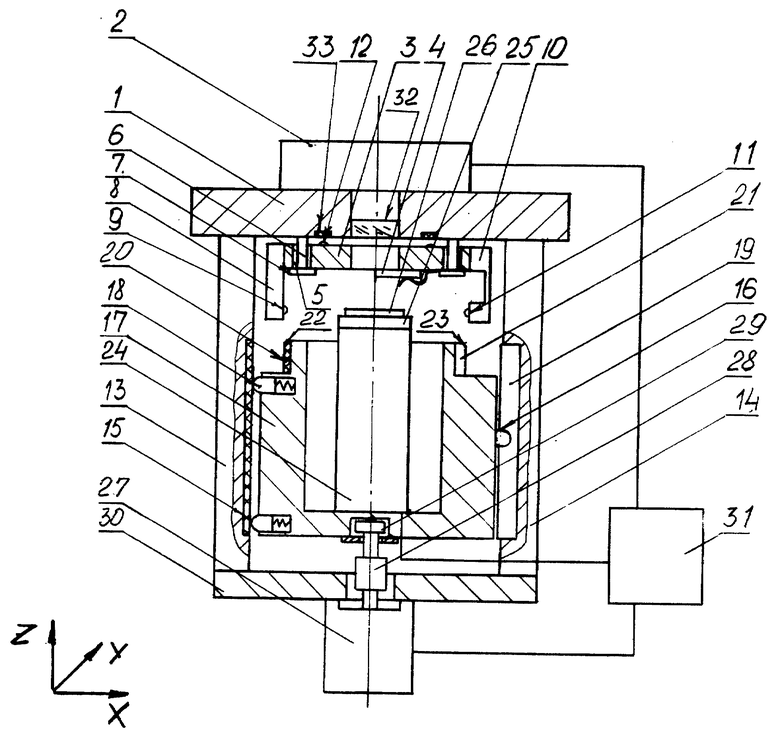
Сканирующий зондовый микроскоп, содержащий платформу, сопряженную с держателем зондов с зондом и со стойками, анализатор, держатель объекта, установленный на сканере, сопряженном с приводом, отличающийся тем, что держатель зонда снабжен упорами, привод выполнен в виде подвижной каретки с подпружиненными и неподвижными первыми опорами, установленной на плоских и V-образных первых направляющих, и снабжен вторыми направляющими в виде двух плоских и одной V-образной с фасками, стойки держателя зондов выполнены в виде трех захватов, один из которых выполнен пружинным и содержит вторые опоры, причем держатель установлен на платформе с возможностью подвижки относительно платформы по координатам X, Y, Z и возможностью взаимодействия упорами с платформой, причем захваты сопряжены с вторыми направляющими привода, при этом величины X, Y подвижки держателя зондов больше осевого нефункционального смещения каретки относительно держателя зондов, а величина подвижки по координате больше перекоса сопряженных поверхностей платформы и упоров держателя зондов, при этом сила перемещения каретки больше силы трения между захватами и вторыми направляющими, а анализатор установлен на платформе.
| REV | |||
| SEI | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Топка с качающимися колосниковыми элементами | 1921 |
|
SU1995A1 |
| 5266-5271 | |||
| DE 4405292 C1, 22.06.1995 | |||
| Устройство для измерения углов наклона обьектов | 1973 |
|
SU487300A1 |
| Камера объектов электронно-зондового анализатора | 1978 |
|
SU974456A1 |

