Изобретение относится к области автоматики и вычислительной техники и может быть использовано для управления технологическими процессами в различных отраслях промышленности, в том числе паровых и водогрейных котлов.
Известен многоцелевой контроллер (Плескач Н.В., Марков, С.К" Макаров В. Н. , "Многоцелевой контроллер КР-300 серии КОНТРАСТ", ж-л "Приборы и системы управления", 1998, N6, стр. 26), содержащий модуль процессора, устройство связи с объектом, пульт и блок преобразования.
Недостатками такого устройства являются ограниченные функциональные возможности.
Известна также АСУТП, содержащая блок дискретно-цифрового преобразования (БДЦП), цифровую вычислительную машину (ЦВМ), блок цифродискретного преобразования (БЦДП), устройство связи с объектом и пульт управления, причем первый вход и выход пульта управления соединены соответственно со вторым выходом и третьим входом БДЦП, информационные входы которого соединены с датчиками объекта управления, а первый выход соединен с первым входом ЦВМ, второй выход которой соединен со входом БЦДП, выход которого соединен со входом устройства связи с объектом (Ларин А.С., Малаховский Е.И. "АСУТП с самоконтролем для турбомашинных объектов", ж-л "Приборы и системы управления" 1993, N9, стр.31).
Это устройство, как наиболее близкое по технической сущности и достигаемому результату, принято за ближайший аналог (прототип).
Недостатками этой системы являются низкая эксплуатационная надежность и малая достоверность контроля, так как самоконтроль проводится в определенные заданные временные интервалы, при которых происходит прерывание управляющей программы и переключение ее на режим контроля. Кроме того, в указанном устройстве не выявляются отказы, связанные с обрывами линий связи с нагрузкой и короткими замыканиями в нагрузке и не контролируется прохождение команд управления на объект управления. В промежутках между циклами самоконтроля исправность системы не контролируется, более того в процессе контроля происходит выход системы из режима управления техпроцессом, что для некоторых техпроцессов недопустимо.
Задачей заявляемого изобретения является повышение эксплуатационной надежности системы и достоверности контроля, а также расширение функциональных возможностей.
Для достижения указанного результата в систему управления, содержащую блок дискретно-цифрового преобразования (БДЦП), цифровую вычислительную машину (ЦВМ), блок цифродискретного преобразования (БЦДП), устройство связи с объектом и пульт управления, причем первый вход и выход пульта управления соединены соответственно со вторым выходом и третьим входом БДЦП, информационные входы которого соединены с датчиками объекта управления, а первый выход соединен с первым входом ЦВМ, второй выход которой соединен со входом БЦДП, выход которого соединен со входом устройства связи с объектом, введен блок диагностики, первый и второй входы которого соединены соответственно с выходом устройства связи с объектом и первым выходом ЦВМ, первый и второй выходы блока диагностики соединены соответственно со вторым входом ЦВМ и четвертым входом БДЦП, третий выход соединен с объектом управления, а четвертый выход - со вторым входом пульта управления.
Для оперативного определения характера и места отказа и быстрого его устранения четвертый выход блока диагностики соединен с системой управления верхнего уровня.
На чертеже представлена структурная схема автоматизированной системы управления с самоконтролем.
АСУ с самоконтролем состоит из блока 1 дискретно-цифрового преобразования, выполненного на базе микросхем коммутаторов и аналогоцифровых преобразователей, ЦВМ 2, блока 3 дискретно-цифрового преобразования, устройства 4 связи с объектом, которое, в частности, может быть выполнено на базе тиристорных и симисторных ключей с опторазвязкой, пульта 5 управления, выполненного на базе микропроцессора и светодиодных индикаторов, блока 6 диагностики, который может быть построен на базе цифроаналоговых преобразователей для формирования аналоговых тестовых сигналов, транзисторных ключей для формирования разовых тестовых сигналов, токовых трансформаторов или датчиков Холла в качестве датчиков тока.
АСУ с самоконтролем работает следующим образом.
Информация, поступающая от датчиков объекта управления на информационные входы БДЦП 1, преобразуется в нем в единую цифровую форму и передается с первого выхода БДЦП 1 на первый вход ЦВМ 2. Далее на основании заданных алгоритмов управления в ЦВМ 2 вырабатываются управляющие воздействия, которые со второго выхода ЦВМ 2 через БЦДП 3 поступают на вход устройства 4 связи с объектом. Одновременно с первого выхода ЦВМ 2 информация о выработанных воздействиях поступает на второй вход блока 6 диагностики. В устройстве 4 формируются команды управления требуемого уровня, которые с его выхода поступают на первый вход блока 6 диагностики и далее с третьего выхода блока 6 диагностики на объект управления.
В блоке 6 диагностики на основании информации, поступившей от ЦВМ 2, осуществляется контроль команд управления, поступающих на объект управления. При отсутствии токов в одной из заданных цепей либо при превышении ими заданных уровней принимается решение об отказе данной цепи и формировании сигнала отказа. Информация об отказе в этих цепях и характере отказа с первого выхода блока 6 диагностики поступает на второй вход ЦВМ 2, в которой на основании алгоритмов работы принимается решение о снятии команды управления, либо, при необходимости, о включении резервного канала.
Сигнал отказа с четвертого выхода блока 6 диагностики поступает на второй вход пульта 5 управления и на систему управления верхнего уровня для информации обслуживающему персоналу. На первый вход пульта 5 управления от ЦВМ 2 со второго выхода БДЦП 1 поступает информация о номере отказавшей цепи и характере отказа. Поступившая информация отображается на индикаторах пульта 5 управления.
Это позволяет обслуживающему персоналу оперативно определять характер и место отказа и быстро устранять отказ.
Кроме того, тестовые сигналы со второго выхода блока 6 диагностики поступают на четвертый вход БДЦП 1, в котором происходит их преобразование одновременно с информацией от датчиков (в паузах между опросами датчиков). При этом управление техпроцессом не прекращается. Преобразованная информация поступает в ЦВМ 2, где происходит ее сравнение с информацией о величине тестовых сигналов в цифровом коде. По результатам сравнения формируется признак отказа, который поступает с выхода ЦВМ 2 через БДЦП 1 на первый вход пульта 5 управления для отображения на индикаторах. Одновременно в ЦВМ 2 в соответствии с алгоритмами работы происходит корректировка работы АСУ, например, задействование других типов датчиков, использование алгоритмов косвенного определения параметра и т.п.
Программное обеспечение АСУ позволяет на основании результатов тестирования в процессе управления непрерывно следить за состоянием системы, своевременно выявлять отклонения от нормы и в соответствии с этим принимать меры для локализации неисправности и корректировки хода техпроцесса. Кроме того, контроль токов, протекающих в цепях нагрузки АСУ, позволяет реализовать специальные алгоритмы управления технологическими процессами, в частности, пуск электродвигателей с ограничением пускового тока, ускоренный пуск электродвигателей, быстрый реверс, что позволяет расширить функциональные возможности системы.
Таким образом, введение блока 6 диагностики и новых связей между блоками позволило повысить достоверность контроля и создать систему, более надежную в эксплуатации и с широкими функциональными возможностями.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕНИЯ ЦИФРОВОЙ ВЫЧИСЛИТЕЛЬНОЙ МАШИНЫ С КАНАЛАМИ СВЯЗИ | 1992 |
|
RU2032938C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ НАПРЯЖЕНИЯ ПЕРЕМЕННОГО ТОКА В КОД | 2001 |
|
RU2195767C1 |
| УСТРОЙСТВО СБОРА ДАННЫХ | 2002 |
|
RU2218596C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ | 1999 |
|
RU2156493C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАЗВОРОТАМИ КОСМИЧЕСКОГО АППАРАТА | 2002 |
|
RU2213029C1 |
| СПОСОБ КАЛИБРОВКИ МАТРИЧНОГО ФОТОПРИЕМНИКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1985 |
|
RU1314800C |
| СИСТЕМА РЕГИСТРАЦИИ ДАННЫХ | 2000 |
|
RU2173835C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА ИЗОБРАЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1987 |
|
RU1612956C |
| МАЛОГАБАРИТНЫЙ РАДИОЛОКАТОР ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2117964C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАЗВОРОТАМИ КОСМИЧЕСКОГО АППАРАТА | 2002 |
|
RU2213681C1 |
Изобретение относится к области автоматики и вычислительной техники и может быть использовано для управления технологичными процессами в различных отраслях промышленности, в том числе паровых и водогрейных котлов. Технический результат заключается в повышении эксплуатационной надежности системы и достоверности контроля, а также расширении функциональных возможностей. Технический результат достигается за счет того, что в автоматизированную систему управления с самоконтролем, содержащую блок дискретно-цифрового преобразования (БДЦП), цифровую вычислительную машину (ЦВМ), блок цифродискретного преобразования (БЦДП), устройство связи с объектом и пульт управления, введен блок диагностики, первый и второй входы которого соединены соответственно с выходом устройства связи с объектом и первым выходом ЦВМ, первый и второй выходы блока диагностики соединены соответственно со вторым входом ЦВМ и четвертым входом БДЦП, третий выход соединен с объектом управления, а четвертый выход - со вторым входом пульта управления. 1 з.п. ф-лы, 1 ил.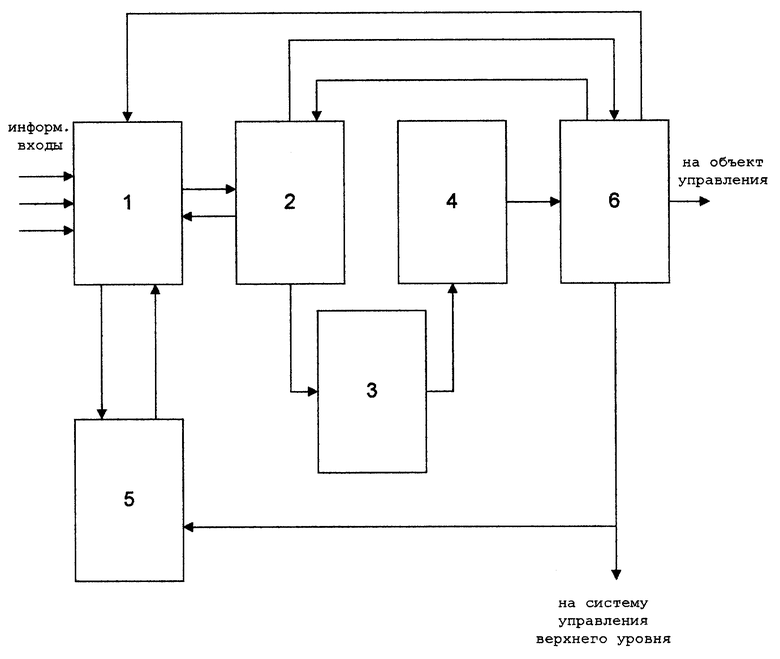
| ЛАРИН А.С | |||
| и др | |||
| АСУТП с самоконтролем для турбомашинных объектов | |||
| В: "Приборы и системы управления", 1993, № 9, с | |||
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
| RU 94026017 A1, 27.05.1996 | |||
| Устройство для программного управления с самоконтролем | 1986 |
|
SU1368858A1 |
| Устройство для программного управления с самоконтролем | 1984 |
|
SU1208533A1 |
| US 5453674 A, 26.09.1995. | |||

