Изобретение относится к системам автоматического управления существенно нестационарными объектами, в частности к системам управления космическим аппаратом на режимах разворотов.
Наиболее близким техническим решением является система автоматического управления космическим аппаратом, содержащая последовательно соединенные первый усилитель, элемент сравнения, релейный элемент с зоной нечувствительности, блок управляющих двигателей, космический аппарат, датчик угла и второй усилитель, второй выход космического аппарата через последовательно соединенные датчик угловой скорости и третий усилитель соединен с инвертирующим входом элемента сравнения [1].
Недостатком известной системы управления является то, что в условиях высокой степени нестационарности эффективности управляющих двигателей и параметров собственно космического аппарата ( например, при значительных неконтролируемых разбросах тяги двигателей, изменении массы космического аппарата при выгорании топлива на основном маршевом двигателе) переходные процессы в режимах разворотов космического аппарата не являются оптимальными по быстродействию, что приводит к перерасходу топлива.
Техническим результатом предлагаемого изобретения является повышение быстродействия режимов разворотов космического аппарата и уменьшение расхода топлива.
Указанный технический результат достигается тем, что в известную систему управления, имеющую последовательно соединенные первый усилитель, элемент сравнения, релейный элемент с зоной нечувствительности, блок управляющих двигателей, космический аппарат, датчик угла и второй усилитель, второй выход космического аппарата через последовательно соединенные датчик угловой скорости и третий усилитель соединен с инвертирующим входом элемента сравнения, дополнительно введены задатчик угла, блок определения модуля, задатчик минимального ускорения, первый умножитель, блок определения квадратного корня, блок выбора минимального сигнала, задатчик допустимой угловой скорости, функциональный усилитель, нелинейный элемент с ограничением и блок памяти, выход задатчика угла соединен с первым входом второго усилителя и через последовательно соединенные блок памяти, блок определения модуля, первый умножитель, блок определения квадратного корня, блок выбора минимального сигнала, функциональный усилитель и нелинейный элемент с ограничением со входом первого усилителя, выход задатчика минимального ускорения соединен со вторыми входами первого умножителя и функционального усилителя, выход задатчика допустимой угловой скорости - со вторым входом блока выбора минимального сигнала, а выход второго усилителя подключен к третьему входу функционального усилителя, при этом функциональный усилитель имеет второй умножитель, четвертый усилитель и два блока деления, первый вход функционального усилителя соединен с первым входом первого блока деления и через последовательно соединенные второй блок деления, первый блок деления и второй умножитель с выходом функционального усилителя, второй вход функционального усилителя подключен ко второму входу второго блока деления, а третий вход через четвертый усилитель подключен ко второму входу второго умножителя.
На фиг.1 представлена функциональная схема системы управления разворотами космического аппарата, на фиг.2 - структура функционального усилителя, на фиг.3 и 4 представлены статические характеристики соответственно нелинейного элемента с ограничением и релейного элемента с зоной нечувствительности, на фиг. 5 и 6 изображены переходные процессы соответственно с выходом на максимальную допустимую угловую скорость и с выходом на максимальную потребную (без ограничений) скорость.
Система управления разворотами космического аппарата (фиг.1) содержит блок определения модуля 1 (БОМ), последовательно соединенные задатчик минимального ускорения 2 (ЗМУ), первый умножитель 3, блок определения квадратного корня 4 (БОКК), блок выбора минимального сигнала 5 (БВМС), задатчик допустимой угловой скорости 6 (ЗДУС), выход которого соединен со вторым входом блока выбора минимального сигнала 5, последовательно соединенные второй усилитель 7, функциональный усилитель 8, нелинейный элемент с ограничением 9 (НЭСО), первый усилитель 10, элемент сравнения 11, релейный элемент с зоной нечувствительности 12 (РЭСЗН), блок управляющих двигателей 13 (БУД) и космический аппарат 14 (КА), а также блок памяти 15 (БП), третий усилитель 16, датчик угловой скорости 17 (ДУС), датчик угла 18 (ДУ) и задатчик угла 19 (ЗУ), первый выход космического аппарата 14 через датчик угла 18 соединен с входом второго усилителя 7 и задатчик угла 19 через последовательно соединенные блок памяти 15 и блок определения модуля 1 - с первым входом первого умножителя 3, второй выход космического аппарата 14 через последовательно соединенные датчик угловой скорости 17 и третий усилитель 16 - со вторым входом элемента сравнения 11, выход блока выбора минимального сигнала 5 соединен с первым входом функционального усилителя 8, а выход задатчика минимального ускорения 2 соединен со вторым входом функционального усилителя 8.
Функциональный усилитель 8 (фиг. 2) содержит четвертый усилитель 20, второй умножитель 21 и первый 22 и второй 23 блоки деления, первый вход функционального усилителя 8 соединен с первым входом первого блока деления 22 и через последовательно соединенные второй блок деления 23, первый блок деления 22 и второй умножитель 21 с выходом функционального усилителя 8, второй вход функционального усилителя 8 подключен ко второму входу второго блока деления 23, а третий вход через четвертый усилитель 20 подключен ко второму входу второго умножителя 21.
Система управления разворотами космического аппарата работает следующим образом.
Из блока 19 поступает сигнал задающего воздействия ϕзад для разворота космического аппарата 14.
Основной контур управления (блоки 7, 8, 9, 10, 11, 12, 13, 14, 16, 17, 18 и 19) осуществляет в режиме разворота космического аппарата относительно определенной связанной его оси отработку сигнала задающего воздействия ϕзад.
Блоки основного контура управления выполняют следующие функции.
Второй усилитель 7 формирует сигнал рассогласования Δϕ между ϕзад и выходом датчика угла 18:
Δϕ = ϕзад-ϕд,
где ϕд - измеренное датчиком угла угловое положение космического аппарата, ϕд = ϕ, а ϕзад задается блоком 19.
Функциональный усилитель 8 обеспечивает усиление сигнала рассогласования:
Δσ = KFΔϕ,
где KF - коэффициент усиления функционального усилителя 8.
Нелинейный элемент с ограничением 9 имеет характеристику, показанную на фиг.3 с двухсторонним ограничением ±Fm.
Первый усилитель 10 осуществляет усиление выходного сигнала  нелинейного элемента с ограничением 9:
нелинейного элемента с ограничением 9:
где Kϕ - коэффициент усиления первого усилителя 10.
Его выходной сигнал σ0 является компонентой позиционного сигнала.
Элемент сравнения 11 формирует сигнал управления U на основе сигнала σ0 и компоненты скоростного сигнала σд - сигнала с выхода третьего усилителя 16:
U = σ0-σд (1)
Релейный элемент с зоной нечувствительности 12 формирует командный сигнал А= А0 на включение блока управляющих двигателей 13 и имеет статическую характеристику, приведенную на фиг.4.
Зона нечувствительности ρ0 релейного элемента обеспечивает исключение "дребезга" в окрестности нуля. Его величина ограничена сверху требуемой статической точностью контура управления Δϕст:
ΔϕстKFKϕ≥ρ0, (2)
то есть
ρ0≤KFKϕΔϕст, (3)
отсюда
Блок управляющих двигателей 13 - это комплект (один или несколько реактивных управляющих двигателей) для обеспечения разворотов космического аппарата, создающих текущее ускорение εT.
Космический аппарат 14 - собственно объект управления, выходными координатами которого являются угол ϕ и угловая скорость ω.
Датчик угловой скорости 17 - измеритель угловой скорости ω космического аппарата, выходной сигнал которого ωд = ω.
Третий усилитель 16 обеспечивает усиление сигнала угловой скорости, сигнал с его выхода σд равен
σд = Kωωд, (5)
где Kω - коэффициент усиления третьего усилителя 16.
Задатчик минимального ускорения 2 - задатчик минимально возможного априорно рассчитанного ускорения εmin, сообщаемого управляющими двигателями космическому аппарату в условиях нестационарности, определенной разбросами характеристик и параметров управляющих двигателей и космического аппарата и допустимых отказов управляющих двигателей.
Задатчик допустимой угловой скорости 6 - задатчик максимально допустимой угловой скорости разворота космического аппарата ωдоп.
Блок определения модуля 1, первый умножитель 3, блок определения квадратного корня 4 и блок выбора минимального сигнала 5 предназначены для обеспечения функционирования системы управления, и их назначение следует из дальнейшего описания непосредственно работы системы.
В системе управления сформированы два режима движений:
1) с выходом на максимально допустимую угловую скорость разворота космического аппарата ωmax = ωдоп;
2) без выхода на максимально допустимую угловую скорость разворота космического аппарата ωmax<ωдоп.
Обеспечение первого и второго режимов движений космического аппарата осуществляется следующим образом.
Блок памяти 15 запоминает значение сигнала задающего воздействия ϕзад.
Блок определения модуля 1 формирует модуль сигнала |ϕзад|.
В первом умножителе 3 перемножаются сигналы |ϕзад| и εmin.
В блоке определения квадратного корня 4 выделяется текущее значение угловой скорости ωmт:
В блоке выбора минимального сигнала выделяется минимальный сигнал из двух входящих в него:
ωm = min{ωдоп;ωmт} (7)
Функциональный усилитель 8 формирует коэффициент усиления
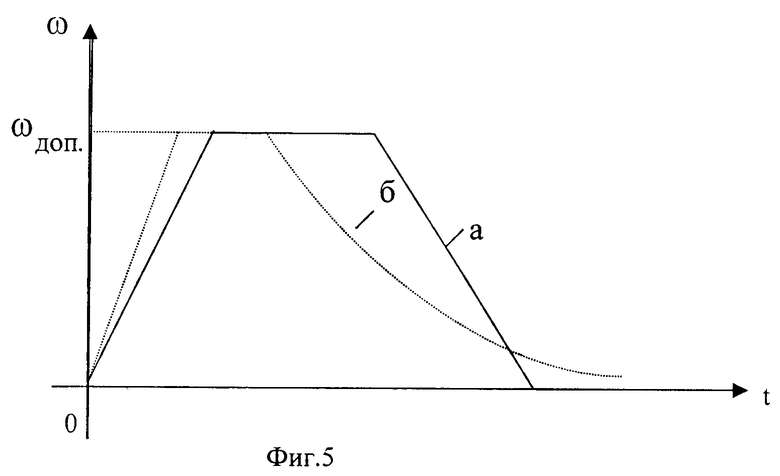
На фиг.5 показан переходный процесс с выходом на максимально-допустимую угловую скорость ωдоп разворота космического аппарата.
Ограничение угловой скорости ωд достигается при сигнале управления U=0 на выходе элемента сравнения 11, при этом
U = FmKϕ-Kωωд = 0. (9)
Из соотношения (9) получаем уровень ограничения Fm:
и при ωд = ωдоп (11)
При этом параметры Kω и Kϕ рассчитываются, исходя из требований устойчивости и статической точности контура управления, определенных по соотношению (3) или (4).
Кривая а на фиг.5 показывает переходный процесс ω(t) для условий работы управляющих двигателей с текущей эффективностью |εт| = εmin, где εт - текущее значение ускорения.
Кривая б на фиг.5 показывает переходный процесс ω(t) для условий работы управляющих двигателей с текущей эффективностью |εт|>εmin.
Коэффициент усиления КF функционального усилителя 8 формируется по соотношению (8) и для первого режима движений при ωm = ωдоп составляет
На фиг. 6 показан переходный процесс с выходом на максимально потребную (без ограничения) угловую скорость разворота космического аппарата ωm<ωдоп.
Кривая а на фиг.6 показывает переходный процесс ω(t) при |εт| = εmin, который имеет идеальный треугольный вид.
Кривая 6 на фиг.6 показывает переходный процесс ω(t) при |εт|>εmin.
Выбор КF по формулам (8) и (13) для указанных выше режимов обеспечивает переходные процессы либо идеальные (трапецеидальные или треугольные), либо затухающие на фазе снижения угловой скорости космического аппарата. Отсутствие такого выбора приводит к колебательности переходных процессов при снижении угловой скорости космического аппарата и, соответственно, к их затягиванию и перерасходу топлива.
Функциональный усилитель 8 формирует коэффициент усиления следующим образом.
Сигнал Δϕ поступает на четвертый усилитель 20 и усиливается с передаточным числом К=2Fm, где Fm определено по формуле (12).
С выхода четвертого усилителя 20 сигнал  поступает на второй умножитель 21.
поступает на второй умножитель 21.
На второй блок деления 23 поступают сигналы ωm и εmin, деление сигналов  определяет сигнал К1, который поступает на первый блок деления 22, на второй вход которого поступает сигнал ωm.
определяет сигнал К1, который поступает на первый блок деления 22, на второй вход которого поступает сигнал ωm.
Сигнал  с выхода первого блока деления 22 поступает на второй умножитель 21, с выхода которого снимается сигнал
с выхода первого блока деления 22 поступает на второй умножитель 21, с выхода которого снимается сигнал
то есть в целом параметр
соответствует формуле (8).
Реализация блока выбора минимального сигнала 5 приведена в [2].
Остальные составные звенья и блоки системы управления выполняются на стандартных элементах автоматики и вычислительной техники, а также могут быть реализованы в бортовой ЦВМ.
Результаты математического моделирования показали высокую эффективность предлагаемой системы управления при изменении в широком диапазоне массы космического аппарата и тяги двигателей.
Источники информации
1. Разыграев А.П. Основы управления полетом космических аппаратов. - М.: Машиностроение, 1990, с.109.
2. А. У. Ялышев, О.И. Разоренов. Многофункциональные аналоговые регулирующие устройства автоматики. М.: Машиностроение, 1981, с.126-128.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ РАЗВОРОТАМИ КОСМИЧЕСКОГО АППАРАТА | 2002 |
|
RU2213681C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАЗВОРОТАМИ КОСМИЧЕСКОГО АППАРАТА | 2002 |
|
RU2211787C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАЗВОРОТАМИ КОСМИЧЕСКОГО АППАРАТА | 2002 |
|
RU2211788C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ СИСТЕМЫ КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2003 |
|
RU2237269C1 |
| БОРТОВАЯ СИСТЕМА УГЛОВОЙ СТАБИЛИЗАЦИИ ДЛЯ УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2338236C1 |
| СИСТЕМА ИДЕНТИФИКАЦИИ УСЛОВНОГО ВРЕМЕНИ СГОРАНИЯ МАССЫ РАЗГОННОГО БЛОКА | 2001 |
|
RU2209157C1 |
| АДАПТИВНОЕ УСТРОЙСТВО КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2008 |
|
RU2367993C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ УСЛОВНОГО ВРЕМЕНИ СГОРАНИЯ МАССЫ РАЗГОННОГО БЛОКА | 2001 |
|
RU2209158C1 |
| УСТРОЙСТВО КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2008 |
|
RU2367992C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕИСПРАВНОСТЕЙ ГИРОСКОПИЧЕСКОГО ИЗМЕРИТЕЛЯ ВЕКТОРА УГЛОВОЙ СКОРОСТИ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2495379C2 |




Изобретение относится к системам автоматического управления нестационарными, преимущественно космическими, объектами. Предлагаемая система служит для разворота космического аппарата в заданное угловое положение. Она содержит блок управляющих реактивных двигателей, а также соответствующим образом связанные задатчики угла разворота, допустимой угловой скорости и минимального ускорения, блок определения модуля, умножители, вычислительные блоки. Имеются блоки выбора минимального сигнала угловой скорости аппарата, памяти и задания времени разворота, а также функциональный усилитель, нелинейный элемент с ограничением и др. Система управления оптимизирует по быстродействию переходные процессы в условиях высокой степени нестационарности эффективности управляющих двигателей и параметров собственно космического аппарата. Последние обусловлены, например, отказами этих двигателей, изменением массы космического аппарата при выгорании топлива на основном маршевом двигателе и т. д. Изобретение позволяет уменьшить расход топлива при оптимально-высоком быстродействии разворотов космического аппарата. 1 з.п.ф-лы, 6 ил.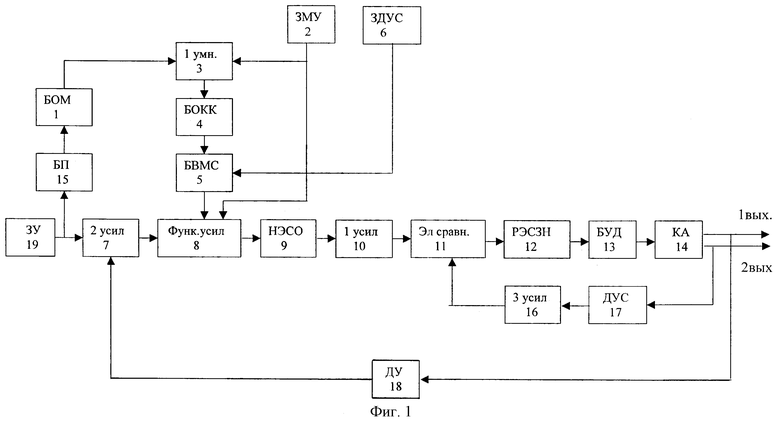
| РАЗЫГРАЕВ А.П | |||
| Основы управления полетом космических аппаратов | |||
| - М: | |||
| Машиностроение, 1990, с.109 | |||
| СПОСОБ УПРАВЛЕНИЯ РАЗВОРОТОМ КОСМИЧЕСКОГО АППАРАТА | 1998 |
|
RU2131832C1 |
| СПОСОБ УПРАВЛЕНИЯ РАЗВОРОТОМ КОСМИЧЕСКОГО АППАРАТА | 1996 |
|
RU2104232C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ РАЗВОРОТОМ КОСМИЧЕСКОГО АППАРАТА | 1996 |
|
RU2115597C1 |
| US 5433402 А, 18.07.1995 | |||
| US 5452869 А, 26.09.1995 | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
