Техническое решение относится к управлению средством перемещения в водной и воздушной средах, когда необходимо провести маневр транспортным средством для его торможения при посадке воздушного летательного аппарата или торможение в одной среде при возникновении аварийной ситуации или табельного положения.
Известны суда со значительной грузоподъемностью, например ледоколы "Арктика" и "Ленин", включающие элементы управления в виде поверхностей, которые взаимодействуют с массой набегающего потока воды (БСЭ, том 24, 1, стр. 287-288). Такие суда имеют усиленный корпус, реверсивный двигатель, который используют для разгона судна при движении в тяжелых льдах. Однако такое судно из-за значительной своей массы на чистой воде имеет значительный выбег, что может привести к аварийной ситуации из-за столкновения с каким-либо препятствием. И в этом случае используют реверсирование двигателя, чтобы на гребном винте создать водный поток противоположного инерционному движению судна направления. Такой способ торможения имеет следующие недостатки: при реверсировании все детали двигателя испытывают перегрузки, которые компенсируют повышением прочности и, следовательно, массы всех силовых деталей, которые участвуют в передаче крутящего момента. Кроме этого, мелкие суда и парусные вообще не имеют двигателя и торможение осуществляют маневром на площади водной среды с помощью последовательных разворотов управляющей поверхности элемента (руля) и опусканий парусов. Однако поверхность для маневра может быть очень ограничена, и тогда используют якорь с опасностью его обрыва.
Гораздо хуже обстоит дело со скоростными летательными аппаратами (именно скоростными), т.к. там более ясно проявляются опасности аварийного возникновения ситуации.
Все летательные аппараты имеют горизонтальные управляющие поверхности с приводами их перемещения в пространстве в вертикальные управляющие поверхности с приводами их перемещения вокруг вертикальной оси. К таким скоростным летательным аппаратам можно отнести F-17, который используется в Балканском конфликте, все летательные аппараты наземного базирования для боевого использования и базирования на авианосцах, "Мираж", СУ 17, ТУ 134 и многие другие (см. , например, патент США 5137193, кл. B 64 D 1/00). При маневре в свободном воздушном пространстве все действия по перемещению управляющих поверхностей своими приводами могут вызвать только перегрузку. Совсем иначе обстоит дело при посадке и вблизи посадочной площадки. Перед касанием необходимо сбросить скорость с одновременным сближением с посадочной площадкой. Для этого выпускают закрылки, сразу же возникает вертикальная составляющая силы, которая направлена вниз к посадочной площадке. Т.о., добиваясь тормозного усилия, т.к. возникает тормозная составляющая, направленная против движения летательного аппарата, получим и составляющую вертикальную, которая приводит к ударной нагрузке при начальной стадии контакта шасси с посадочной площадкой, а это опасно при осуществлении аварийной посадки, а при табельной посадке приведет к перегрузкам во всех деталях шасси с незначительной амортизацией. Положение еще более усугубляется в следующих случаях:
1. Посадочная площадка в плохом состоянии, допустим, в результате снегопада, обледенения, когда каждая неровность может привести к неконтролируемому броску.
2. При перегрузке летательного аппарата его посадка вообще опасна из-за перегрузки шасси. Такой случай имеет место при сохранении боекомплекта и всего горючего. В этих случаях стараются избавиться от излишка груза путем его сброса, а это большие экономические потери.
3. Во всех случаях происходит повышенный износ опорной поверхности летательного аппарата, и это обстоятельство приводит также к материальным затратам.
4. Особенно опасная ситуация возникает при снижении сцепления шасси своими колесами с посадочной площадкой и при неравномерном износе указанных элементов, т. к. в этом случае произойдет занос летательного аппарата и возникнет аварийная ситуация.
5. Особое значение имеет посадка на подвижную палубу авианосца, когда торможение осуществляется различными гибкими элементами (так устроены тормозные устройства по а.с. N 859677, 344618, 355785, 528859, кл. В 64 F 1/02, остальное - В 64 F 1/10).
Во всех случаях возникают перегрузки, которые зависят от состояния палубы и тормозного усилия, которое зависит от массы посадочной летательной машины.
Целью технического решения является устранение всех указанных недостатков, а именно:
осуществление контакта летательного аппарата с посадочной площадкой без перегрузки и без интенсивного перемещения летательного аппарата к посадочной поверхности, что позволит осуществлять посадку без перегрузки на шасси и при излишней массе летательного аппарата. Для водных транспортных средств техническое решение позволит дополнительно осуществить торможение судна без дополнительной затраты энергии и возможности осуществления маневра в сочетании с тормозным усилием.
Технический результат достигается тем, что элемент управления с плоскостью, которая взаимодействует с набегающим потоком массы аморфной среды, выполняют разрезным по его продольной плоскости и оснащают приводом перемещения относительно плоскости разреза.
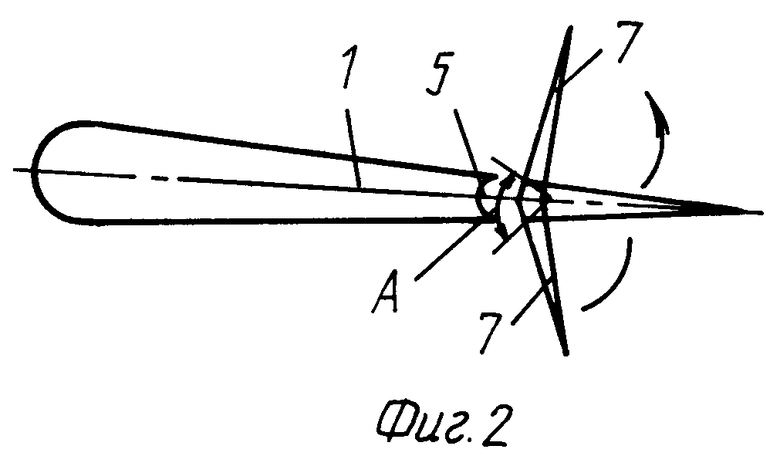
На фиг. 1 представлен вид в изометрии на закрылок летательного аппарата в виде конструктивной схемы. На фиг.2 представлена схема при торможении летательного аппарата без пояснения всех деталей технического решения, которые не определяют его для использования и могут быть выполнены различным образом.
В дальнейшем все пояснения и описание будут даны для летательного аппарата с крылом и закрылком. Однако следует иметь в виду, что точно также устроен и управляющий элемент с вертикальной плоскостью управления для водной среды и хвостового управления летательного аппарата.
Крыло 1 соединено с закрылком 2 поворотно посредством оси 3 с приводом 4 поворота закрылка 2. Оконечность крыла 1 имеет цилиндрическую поверхность 5, а обращенный к крылу закрылок 2 имеет скосы 6. Закрылок 2 разрезан вдоль его плоскости на две части, которые примыкают друг к другу там, где части сходятся, а примерно посредине части 7 имеют вырез 8, в котором размещена тяга 9 с рамкой 10 и приводом 11, который может быть выполнен гидравлическим двухсторонним. На оси 3 расположены проушины (не показаны, выполнены как на дверце любого шкафа), а на гибкой тяге 9 - выступ 12.
Действует устройство следующим образом.
Закрылок 2 может перемещаться в угловом направлении приводом 4 за ось 3. Замкнутое положение частей 7 закрылка 2 фиксируется пружиной, которая не показана, а тяга 9 выполнена гибкой. Именно такое выполнение позволяет частям 7 закрылка 2 перемещаться в угловом направлении. Если необходимо осуществить торможение приводом 11, перемещают рамку 10 с тягой 9 и выступом 12, который упирается в края выреза 8 и разводит части 7, как показано на фиг.2. При этом преодолевается сопротивление пружины, которая стягивает части 7. Можно и в разведенном положении частей 7 производить угловое перемещение закрылка 2, и тяга 9 будет изгибаться в вырезе 8.
Пояснения к устройству.
1. В общем случае закрылок является элементом управления, т.к. охватывает и водное и воздушное применение при одинаковом устройстве. Для водного использования крыло заменяется защитной частью, которая снижает сопротивление при движении.
2. В зависимости от величины частей 7 закрылка 2 и угла А будет осуществляться различная схема торможения и по величине и по направлению. Во всех случаях, если разведение частей 7 будет без поворота закрылка, будет наблюдаться только тормозное усилие, т.к. вертикальные силы будут симметричны и будут уравновешиваться, т.е. можно осуществить мягкое касание летательного аппарата даже при повороте закрылка вниз, т.к. угол будет много меньше и будет торможение за счет разведенных частей 7.
3. Торможение осуществляется от взаимодействия с воздушной (или водной) средой, что снижает и износ шасси и воздействие на тормозное устройство, как и перегрузки на экипаж. Устранение ударной нагрузки о поверхность посадки позволит ее осуществить с излишней массой.
4. Конструктивно можно выполнить вместо гибкой тяги 9 другой вариант, но более сложный.
5. Следует иметь в виду, что щель явная между крылом и закрылком (соответственно позиции 1, 2) показана условно для проявления всех элементов конструкции. В действительности такого зазора быть не должно, т.к. можно получить вихри и разрывы воздушного потока, который обтекает крыло и создает подъемную силу. Видимый зазор должен быть перекрыт гибкой пластиной, которая изгибается, оставляя зазор перекрытым при разведении элементов (частей) 7. Можно гибкую пластину совместить с пружиной, которая удерживает части 7 в прилегающем положении на правом конце закрылка.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1998 |
|
RU2135398C1 |
| СКОРОСТНОЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1995 |
|
RU2114030C1 |
| СКОРОСТНОЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1997 |
|
RU2125522C1 |
| СКОРОСТНОЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1997 |
|
RU2130859C1 |
| СПОСОБ АВАРИЙНОГО ТОРМОЖЕНИЯ СКОРОСТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1996 |
|
RU2110449C1 |
| РЕАКТИВНЫЙ ДВИЖИТЕЛЬ | 1999 |
|
RU2160208C2 |
| ВОЗДУШНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС | 1998 |
|
RU2130868C1 |
| СКОРОСТНОЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С УСТРОЙСТВОМ ДЛЯ АВАРИЙНОЙ ПОСАДКИ НА ВОДНУЮ ПОВЕРХНОСТЬ | 1998 |
|
RU2130860C1 |
| СПОСОБ СПАСЕНИЯ СКОРОСТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1996 |
|
RU2096272C1 |
| СПОСОБ СПУСКА ОБЪЕКТА С ЛЕТАТЕЛЬНОГО АППАРАТА | 1997 |
|
RU2130870C1 |
Изобретение относится к средствам для управления транспортом в водной и воздушной средах. Элемент управления транспортным средством для аморфной среды включает привод перемещения поверхности управления в пространстве, взаимодействующей с набегающим потоком массы аморфной среды. Он выполнен с разрезом вдоль поверхности управления и перпендикулярно его угловому перемещению приводом и содержит дополнительный привод для перемещения частей элемента относительно разреза. Изобретение позволяет осуществлять посадку летательного аппарата без перегрузки на шасси и осуществлять торможение водного транспорта без дополнительной затраты энергии. 2 ил.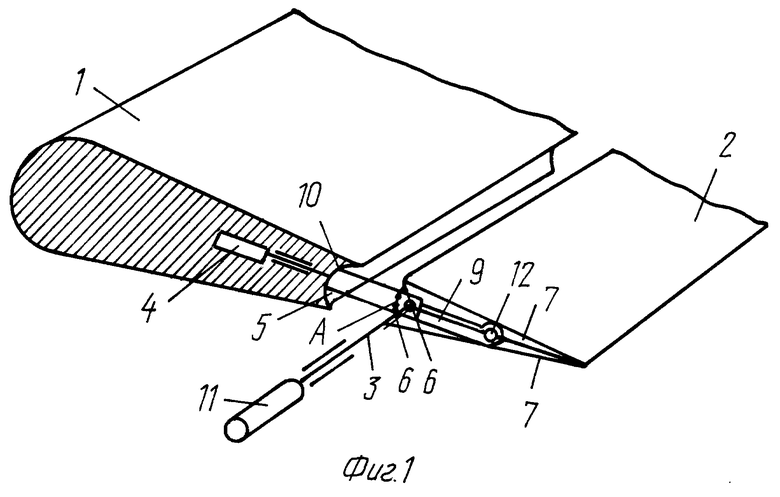
Элемент управления транспортным средством для аморфной среды, включающий привод перемещения поверхности управления в пространстве, взаимодействующей с набегающим потоком массы аморфной среды, отличающийся тем, что указанный элемент выполнен с разрезом вдоль поверхности управления и перпендикулярно его угловому перемещению приводом его и снабжен дополнительным приводом перемещения частей элемента относительно разреза.
| Судовой руль | 1972 |
|
SU639437A3 |
| Устройство для соединение поворотного закрылка с профилем гидродинамического сечения | 1973 |
|
SU483297A1 |
| Устройство для автоматизированного контроля радиоэлектронной аппаратуры | 1988 |
|
SU1589405A1 |
| US 4605187 A, 12.08.1986. | |||

