Изобретение относится к области определения координат точек и ориентации участков поверхности тела сложной формы.
Известен способ измерения деформаций изделий, заключающийся в том, что на поверхность исследуемого изделия до нагружения проецируют эталонную систему меток, затем отраженную от поверхности изделия эталонную систему меток фиксируют в плоскости регистрации изображения изделия, одновременно проецируют в плоскость регистрации изображения изделия эталонную систему меток и совмещают ее с отраженной от поверхности изделия эталонной системой меток до полного исчезновения образующихся в процессе совмещения интерференционных полос, нагружают изделие, регистрируют образующуюся интерференционную картину и по ней измеряют деформацию (см. патент РФ N 1245875, М. кл. G 01 B 11/16).
Основным недостатком описанного способа является повышенная трудоемкость подготовки поверхности изделия к измерениям его деформаций вследствие необходимости использования устройства для проецирования системы меток, а именно, проектора, плоскости регистрации изображения и отражающей поверхности на изделии.
Наиболее близким к предлагаемому изобретению по технической сущности и достигаемому результату (прототипом) является способ контроля профиля криволинейных поверхностей, заключающийся в том, что в контролируемых точках криволинейной поверхности размещают плоские метки, в качестве которых используют световые марки, путем последовательного формирования в каждой из указанных точек изображений световых марок посредством световых лучей с отличными одна от другой длинами волн, сканируют изображение световой марки, представляющее собой интерференционную картину, находят координаты контролируемой точки и определяют профиль поверхности (см. патент РФ N 1254292, М. кл. G 01 B 11/24).
Основным недостатком способа контроля профиля криволинейных поверхностей является низкая эффективность использования вследствие сложности анализа результатов измерений воспринимаемого изображения интерференционной картины, полученной посредством световых лучей с отличными одна от другой длинами волн.
Сущность изобретения заключается в том, что в способе определения координат точек и ориентации участков поверхности тела сложной формы, включающем размещение плоских меток на контролируемых участках поверхности тела сложной формы и получение изображения меток, в качестве меток используют элементы одинаковой формы и размеров и сравнивая изображения метки и эталонной метки, расположенной таким образом, что координаты всех точек метки известны, судят о координатах точек поверхности тела сложной формы, а также об ориентации участка этой поверхности, на котором расположена метка, учитывая угол его наклона.
Техническим результатом является повышение эффективности определения координат точек и ориентации участка поверхности тела сложной формы путем упрощения анализа результатов измерения воспринимаемого изображения этой поверхности.
Упрощение анализа результатов измерений воспринимаемого изображения поверхности тела сложной формы осуществляется за счет того, что в качестве меток, которые размещают в контролируемых точках этой поверхности, используют плоские элементы одинаковой формы и размеров, а также на основании сравнения размеров и формы меток, полученных при восприятии изображения поверхности тела сложной формы, с размерами и формой эталонной метки, размещенной на горизонтальной базовой поверхности, подобной метке. При этом по соотношению размеров метки, полученных при восприятии изображения поверхности тела сложной формы, и размеров эталонной метки определяют вертикальную координату точки поверхности тела относительно горизонтальной базовой поверхности, а по соотношению формы метки, полученной при восприятии изображения поверхности тела сложной формы, и формы эталонной метки определяют ориентацию участка поверхности этого тела; угол и направление наклона участка указанной поверхности к вертикальной базовой поверхности, перпендикулярной горизонтальной базовой поверхности. Следовательно, отпадает необходимость в анализе интерференционной картины, получаемой при использовании способа - прототипа посредством световых лучей с отличными одна от другой длинами волн.
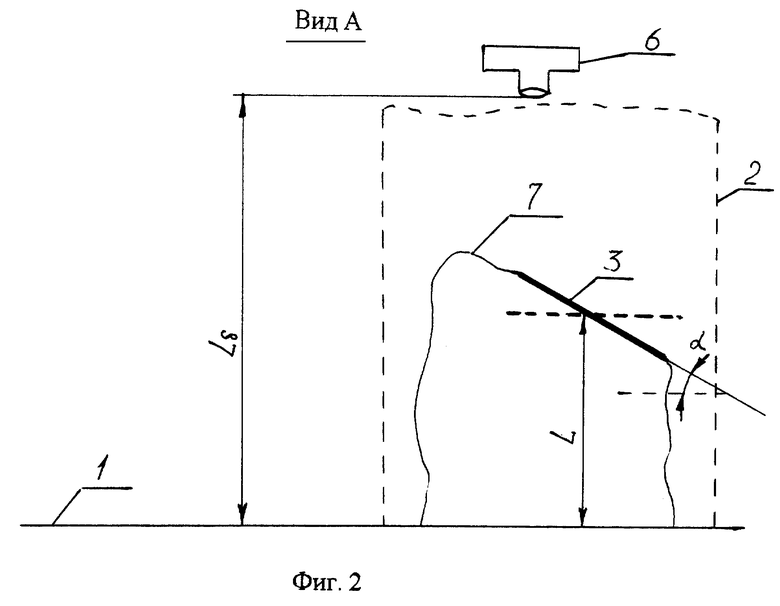
Предлагаемое изобретение поясняется чертежом, где на фиг. 1 изображена схема осуществления способа определения координат точек и ориентации участков поверхности тела сложной формы, на примере боковой поверхности модели автомобиля, вид сверху, на фиг. 2 - вид А фиг. 1.
Способ определения координат точек и ориентации участков поверхности тела сложной формы осуществляется при помощи горизонтальной 1 и перпендикулярной ей вертикальной 2 базовых поверхностей, метки, выполненной, например, в форме круга 3 (в проекции эллипса с большой 4 и малой 5 осями), а также с использованием оптического фиксирующего прибора 6. Метка размещается в контролируемой точке участка 7 поверхности тела сложной формы.
Кроме этого, на чертеже изображено:
α - угол наклона участка 7 поверхности тела сложной формы к горизонтальной 1 базовой поверхности;
β - угол наклона участка 7 поверхности тела сложной формы к вертикальной 2 базовой поверхности;
Lб - расстояние от объектива оптического фиксирующего прибора 6 до горизонтальной 1 базовой поверхности;
L - расстояние от участка 7 поверхности тела сложной формы до горизонтальной 1 базовой поверхности.
Способ определения координат точек и ориентации участков поверхности тела сложной формы осуществляется следующим образом.
В контролируемых точках поверхности тела сложной формы, например, на участке 7 поверхности тела сложной формы, размещают метки, пропорциональные размерам этой поверхности. В качестве меток используют плоские элементы одинаковой формы и размеров, высота которых достаточно мала по сравнению с их площадью, например, круги 3.
При большой площади поверхности тела метки распространяют по этой поверхности с помощью рассеивания. Рассеивание производят с устройства, находящегося над исследуемой поверхностью, например, с самолета, вертолета, из пневмопушки или из распылителя краски.
Восприятие изображения поверхности тела сложной формы осуществляют оптическим фиксирующим прибором 6, например, фото-, теле-, кино- или видеокамерой с устройства, расположенного над исследуемой поверхностью. Последующий анализ воспринимаемого изображения производят относительно горизонтальной 1 и перпендикулярной ей вертикальной 2 базовых поверхностей. При этом эталонную метку (на чертеже не показана), размещают на горизонтальной 1 базовой поверхности. Для тел сложной формы в качестве горизонтальной 1 базовой поверхности используют, например, стол, потолок или стенд.
Анализ результатов измерений воспринимаемого изображения поверхности тела сложной формы осуществляют на основе сравнения размеров и формы меток, полученных при восприятии изображения этой поверхности, с размерами и формой эталонной метки. Так, по соотношению размеров метки, полученных при восприятии изображения указанной поверхности, и размеров эталонной метки определяют удаление от поверхности тела сложной формы, т.е. вертикальную координату точки поверхности тела сложной формы относительно горизонтальной 1 базовой поверхности. А по соотношению формы метки, полученной при восприятии изображения поверхности тела сложной формы, и формы эталонной метки определяют угол и направление наклона участка этой поверхности относительно вертикальной 2 базовой поверхности.
Для определения остальных координат контролируемых точек поверхности тела сложной формы полученные данные по вертикальным координатам контролируемых точек, и направлению наклона участков этой поверхности относительно вертикальной базовой поверхности подвергают обработке на ЭВМ, в процессе которой вводят координатные оси.
Пример конкретного выполнения способа.
В контролируемых точках поверхности тела сложной формы, а именно, боковой поверхности модели автомобиля, размещают метки, пропорциональные размерам этой поверхности. В качестве меток используют плоские элементы одинаковой формы и размеров, представляющие собой капли краски, нанося их с помощью распылителя. В качестве горизонтальной 1 базовой поверхности используют горизонтальную плоскость стола. Восприятие изображения боковой поверхности модели автомобиля осуществляют посредством оптического фиксирующего прибора 6, а именно фотокамеры.
Если на участке боковой поверхности модели автомобиля воспринимаемое изображение метки имеет форму круга, то определяют расстояние L от участка исследуемой поверхности до горизонтальной 1 базовой поверхности по следующей формуле:
где D - диаметр воспринимаемого изображения метки в форме круга;
k - коэффициент пропорциональности.
Коэффициент пропорциональности определяют из следующей зависимости:
k = LбDб,
где Lб - расстояние от объектива оптического фиксирующего прибора 6 до горизонтальной 1 базовой поверхности;
Dб - диаметр эталонной метки на горизонтальной 1 базовой поверхности, подобной метке.
Величина расстояния L характеризует вертикальную координату контролируемой точки боковой поверхности модели автомобиля относительно горизонтальной 1 базовой поверхности.
Если на участке 7 боковой поверхности модели автомобиля воспринимаемое изображение метки имеет форму эллипса, то участок 7 этой поверхности расположен под углом к горизонтальной 1 базовой поверхности.
Угол наклона α участка 7 исследуемой поверхности к горизонтальной 1 базовой поверхности определяют по формуле:
где dН - длина малой оси 5 эллипса;
dб - длина большой оси 4 эллипса.
Направление наклона участка 7 исследуемой поверхности определяют углом наклона β к вертикальной 2 базовой поверхности. Этот угол определяется уже в процессе машинной обработки изображения.
Таким образом, использование предлагаемого изобретения обеспечивает повышение эффективности определения координат точек и ориентации участков поверхности тела сложной формы путем упрощения анализа результатов измерений воспринимаемого изображения этой поверхности.
Использование: определение координат точек и ориентации участков поверхности тела сложной формы. Сущность изобретения: на контролируемых участках поверхности тела сложной формы размещают метки, пропорциональные размерам этой поверхности. В качестве меток используют плоские элементы одинаковой формы и размеров. Восприятие изображения поверхности тела сложной формы осуществляют оптическим фиксирующим прибором, например видеокамерой. Сравнивая изображения метки и эталонной метки, расположенной таким образом, что координаты всех точек метки известны, судят о координатах точек поверхности тела сложной формы, а также об ориентации участка поверхности, на котором расположена метка, учитывая угол его наклона. Технический результат: повышение эффективности определения координат точек и ориентации участков поверхности тела сложной формы путем упрощения анализа результатов измерений воспринимаемого изображения этой поверхности. 2 ил.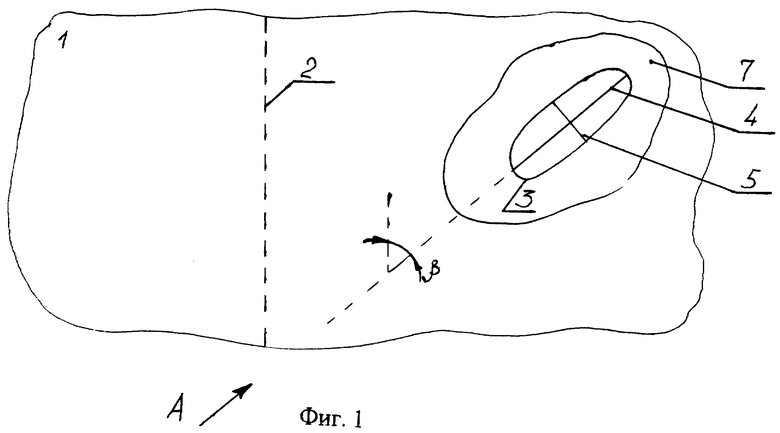
Способ определения координат точек и ориентации участков поверхности тела сложной формы, включающий размещение плоских меток на контролируемых участках поверхности тела сложной формы и получение изображения меток, отличающийся тем, что в качестве меток используют элементы одинаковой формы и размеров и, сравнивая изображения метки и эталонной метки, расположенной таким образом, что координаты всех точек метки известны, судят о координатах точек поверхности тела сложной формы, а также об ориентации участка этой поверхности, учитывая угол его наклона.
| Способ контроля профиля криволинейных поверхностей | 1984 |
|
SU1254292A1 |
| Способ измерения деформаций изделий | 1984 |
|
SU1245875A1 |
| Способ измерения упругих деформаций | 1987 |
|
SU1610254A1 |
| Устройство для измерения деформаций объектов | 1991 |
|
SU1796894A1 |

