Изобретение относится космической технике, а именно к средствам обеспечения внекорабельной деятельности оператора.
Известна кисть манипулятора [1] в системе дистанционного управления для захвата объекта, включающая средство захвата объекта со средствами центровки, средства контроля момента, прилагаемого к средствам центровки, средства управления выходным сигналом привода.
Однако указанное устройство является механизмом дистанционного управления и требует для выполнения операций захвата груза применения электромеханических исполнительных механизмов и электрических устройств управления и контроля. Его применение требует расходования электрической энергии космического корабля, значительно удорожает конструкцию и может быть использовано только с устройствами типа "манипулятор".
Наиболее близким по технической сущности к заявляемому изобретению является устройство в виде кольца адаптера полезного груза [2], в который входит приемный узел, закрепляемый на корпусе космического корабля, устанавливаемый узел, поворотные рычаги и механизм управления.
Однако возможный ареал мест установки полезного груза, например на внешней поверхности орбитального космического корабля, ограничен тем, что для надежной фиксации груза с предупреждением его возможных колебаний относительно корпуса космического корабля необходима установка не менее трех механизмов крепления, для обеспечения крепления груза необходим расход электрической энергии корабля-носителя и наличие электрических соединений с кораблем-носителем, необходимы электрические устройства управления процессом крепления, расположенные на корабле-носителе или доставляемом грузе.
Техническим результатом, достигаемым с помощью заявляемого изобретения, является создание механического автономного малогабаритного устройства крепления полезных грузов, доставляемых, например, на находящийся на орбите космический корабль другим транспортным кораблем, или грузов, доставляемых, например, внутри космического корабля с последующей установкой и креплением на внешней поверхности корпуса орбитального корабля оператором без потребления электрической энергии корабля или полезного груза.
Технический результат достигается тем, что в устройстве крепления грузов, преимущественно за пределами находящегося на орбите космического корабля, содержащем приемный узел, устанавливаемый узел, поворотные рычаги, механизм управления, в отличие от прототипа приемный узел выполнен в виде полого цилиндра, снабженного внутренними заплечиками, внутренним приемным конусом и пазами ориентировки устанавливаемого узла, устанавливаемый узел выполнен в виде снабженного внешним заходным конусом полого цилиндра, сопрягаемым внешней поверхностью с внутренней поверхностью приемного узла, поворотные рычаги соединены тягами и размещены внутри устанавливаемого узла параллельно его дну, оси поворота рычагов расположены на окружности, соосной цилиндру устанавливаемого узла, а на конце каждого рычага внутри устанавливаемого узла размещены как минимум два ролика, оси вращения роликов перпендикулярны оси вращения рычага, один ролик размещен непосредственно на рычаге, а второй, соосный первому, размещен на конце консольного упругого стержня, противоположный конец которого закреплен на рычаге, сумма радиуса окружности размещения осей вращения рычагов и максимального расстояния от оси вращения рычага до внешней поверхности ролика, установленного непосредственно на рычаге, меньше внешнего диаметра устанавливаемого узла, а сумма радиуса окружности размещения осей вращения рычагов и максимального расстояния от оси вращения рычага до внешней поверхности ролика, установленного на упругом стержне, больше внешнего диаметра устанавливаемого узла, но меньше внутреннего диаметра приемного узла на величину зазора для свободного вращения рычага с роликами, радиус роликов, размещенных непосредственно на рычагах, равен расстоянию от дна устанавливаемого узла до оси вращения ролика, расстояние от плоскости сопряжения днищ устанавливаемого и приемного узлов до внутренней поверхности заплечиков приемного узла меньше максимального расстояния от указанной плоскости до внешней поверхности ролика, установленного на упругом стержне, на величину упругой деформации стрежня, на внешней поверхности устанавливаемого узла выполнены выступы, сопрягаемые с пазами приемного узла, механизм привода выполнен в виде рукоятки ручного управления, закрепленной на одном из поворотных рычагов, с фиксацией в двух положениях "открытом-закрыто", в положении рукоятки ручного управления "открыто" продольная ось каждого рычага смещена относительно линии, соединяющей ось устанавливаемого узла с осью вращения рычага, на угол, при котором ролики, установленные на рычаге, расположены внутри приемного узла.
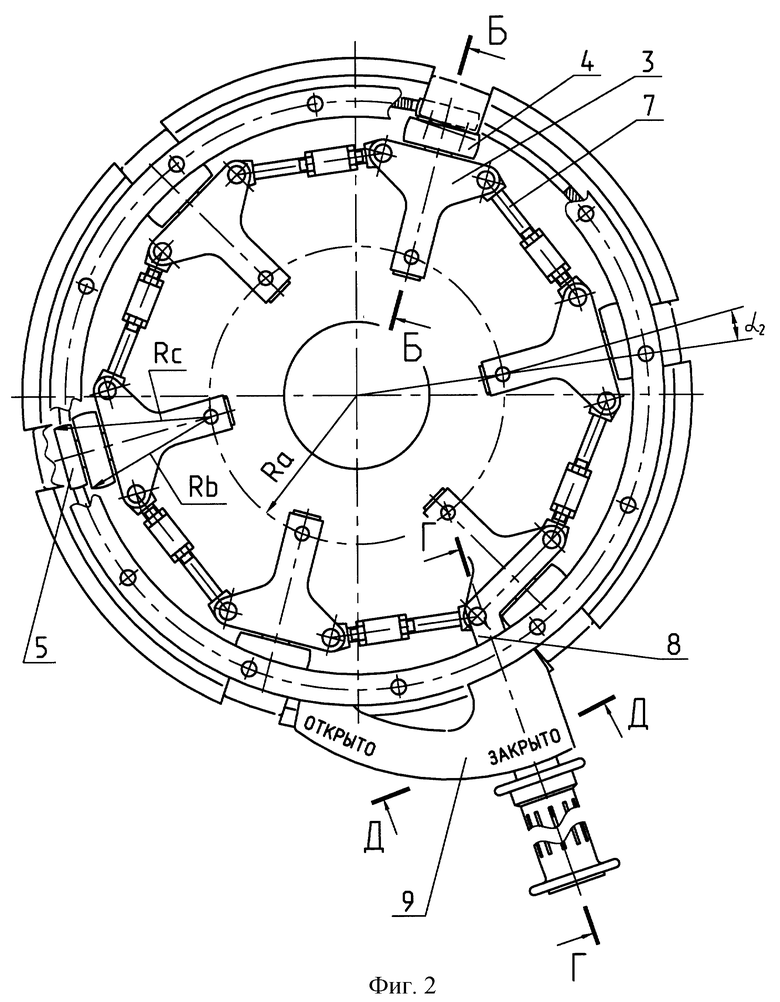
Угол поворота рукоятки от исходного положения "открыто" в положение "закрыто" соответствует положению, когда ролики, закрепленные на упругих стержнях, находятся вне устанавливаемого узла внутри приемного узла с опорой на его заплечики, а ролики, закрепленные непосредственно на поворотных рычагах, находятся внутри устанавливаемого узла с опорой на внутреннюю поверхность дна узла, что обеспечивает крепление устанавливаемого узла на приемном узле. За счет углового смещения продольной оси рычага относительно линии соединения оси цилиндра устанавливаемого узла с осью вращения рычага в положении "открыто" ролики, размещенные на поворотных рычагах (при указанных соотношениях величин радиусов размещения ролика), расположены внутри устанавливаемого узла, обеспечивая свободную установку устанавливаемого узла на приемный узел.
Реализацию устройства крепления грузов рассмотрим на примере конструкции, представленной на фиг.1-7.
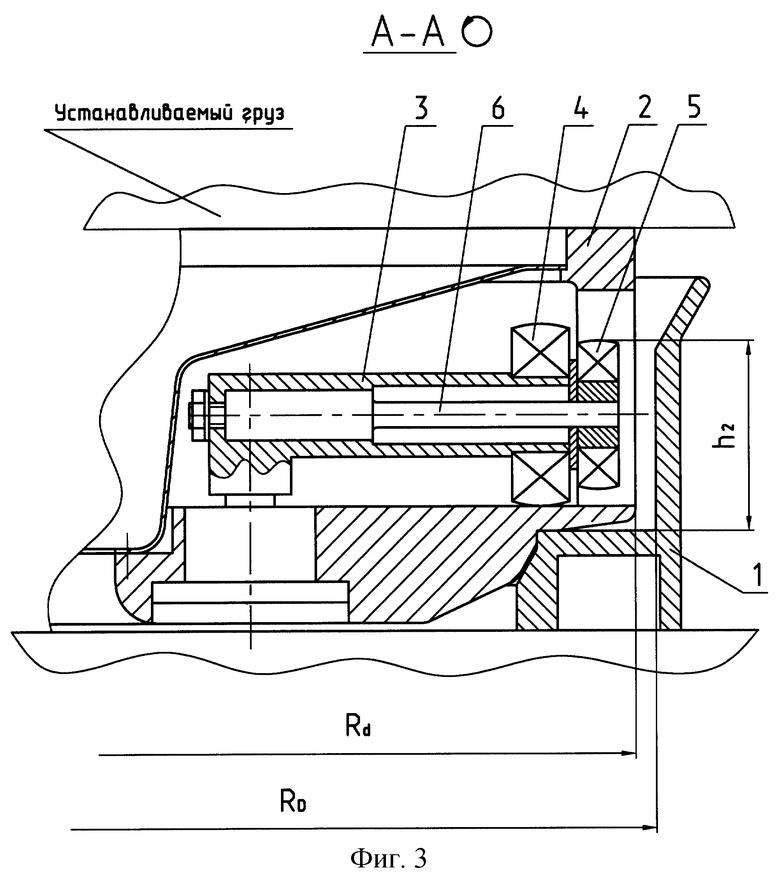
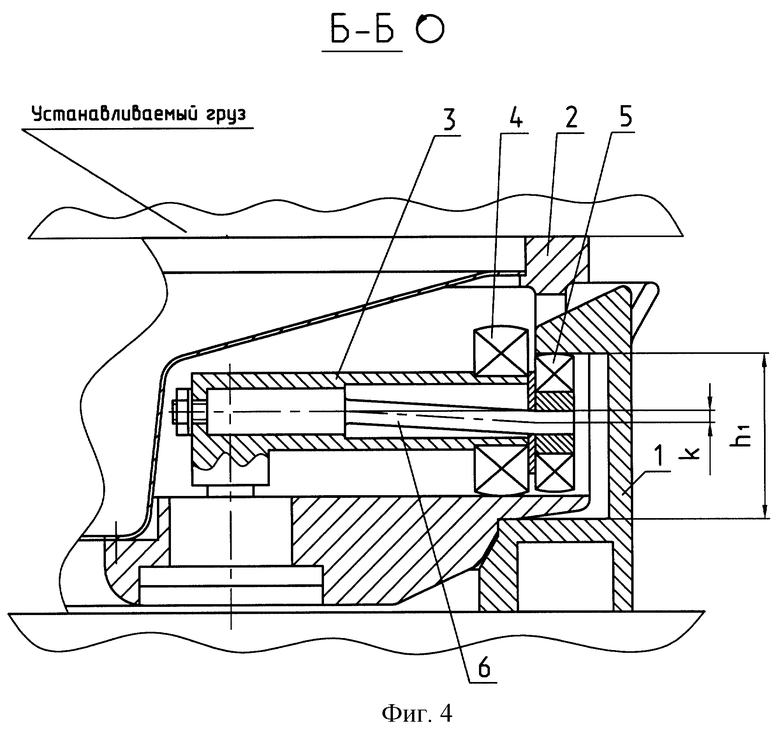
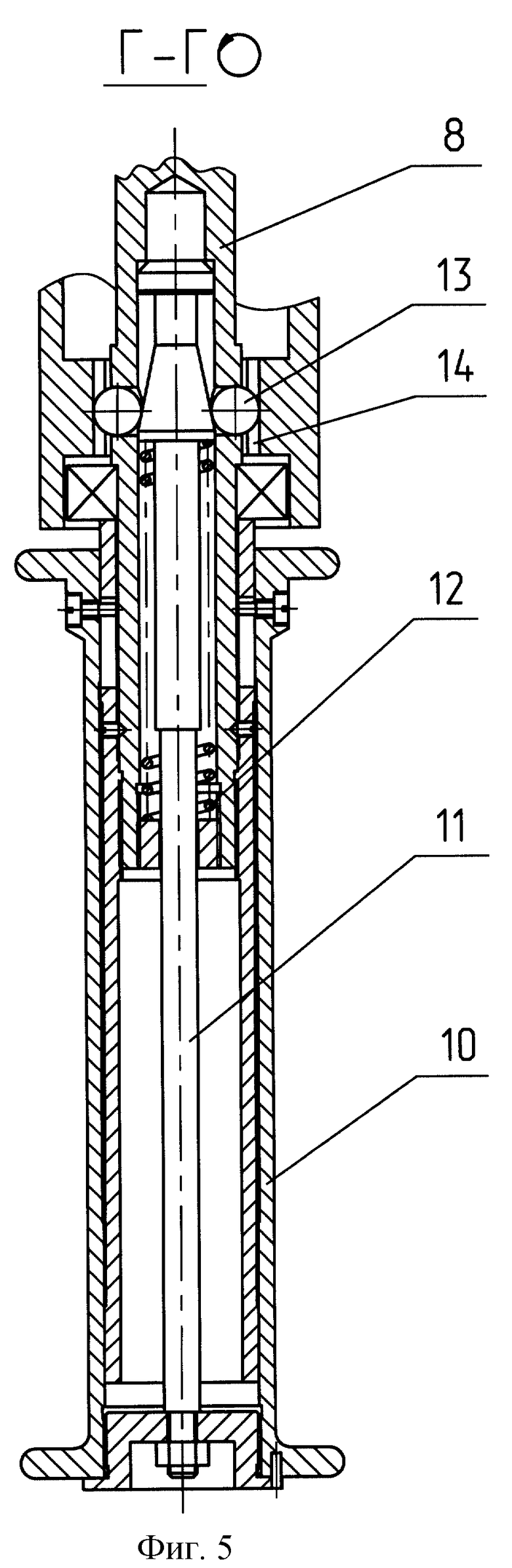
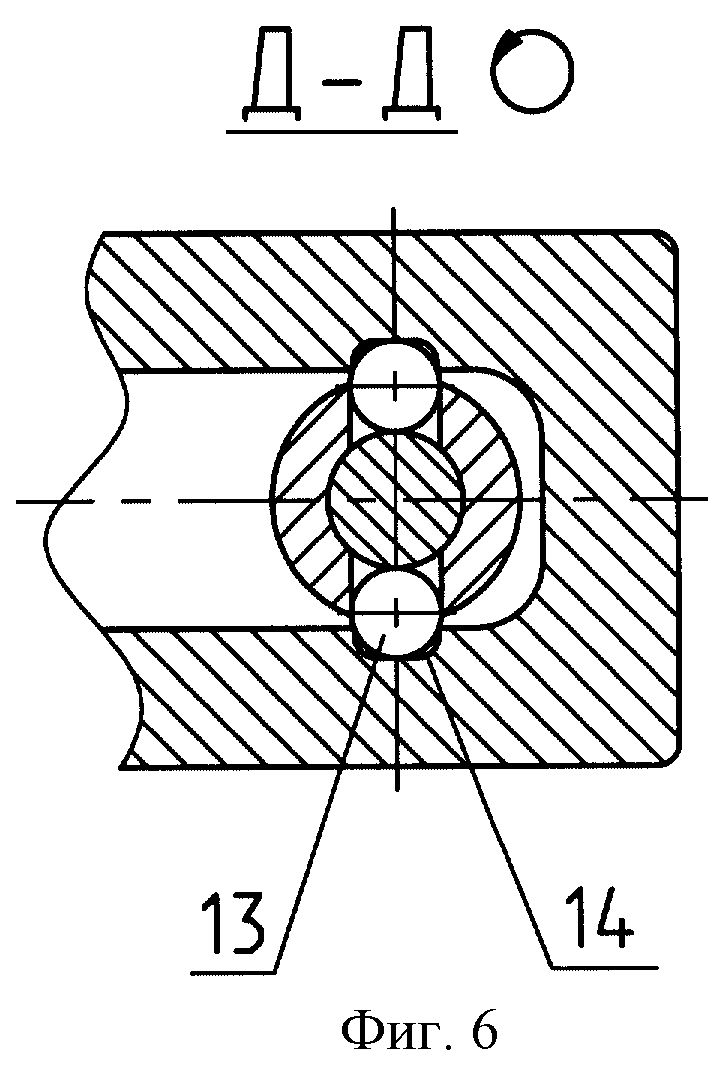
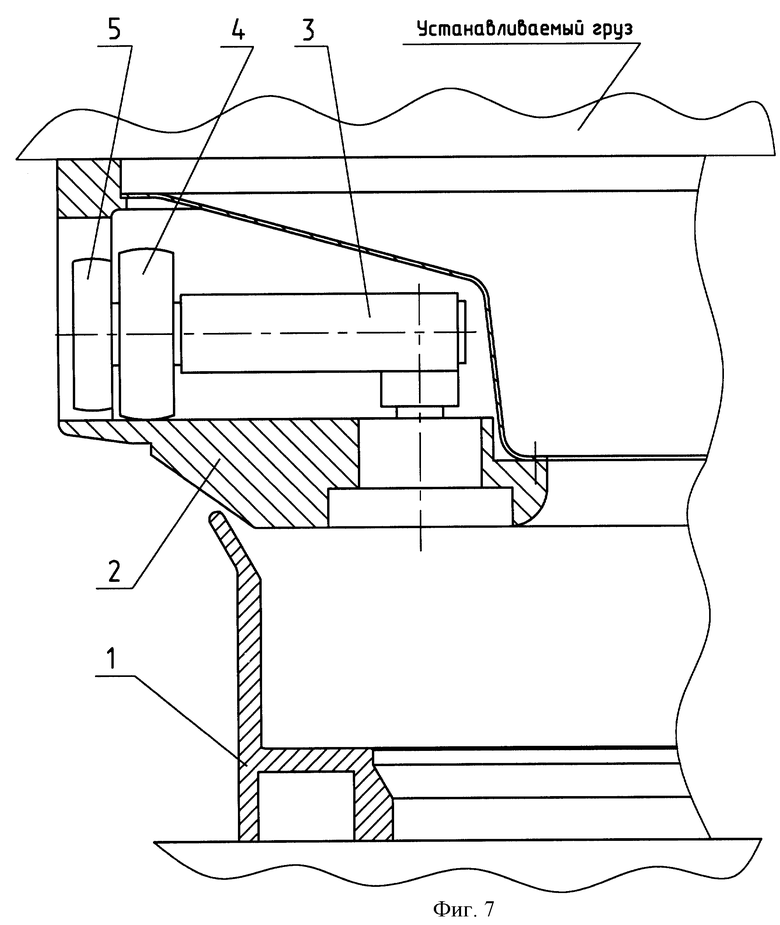
На фиг.1 представлен общий вид устройства при положении рукоятки управления "открыто"; на фиг.2 - общий вид устройства при положении рукоятки управления "закрыто"; на фиг.3 - поперечное сечение устройства при положении рукоятки управления "открыто"; на фиг.4 - поперечное сечение устройства при положении рукоятки управления "закрыто"; на фиг.5 - продольное сечение по оси рукоятки управления; на фиг.6 - сечение по шариковому замку рукоятки управления; на фиг.7 - поперечное сечение по приемному и устанавливаемому узлам во время их сближения.
Устройство содержит приемный узел 1, закрепленный заранее на месте эксплуатации, например на внешней поверхности корпуса орбитального корабля, и устанавливаемый узел 2 с грузом, подлежащим установке на приемном узле. Приемный узел 1 представляет собой полую цилиндрическую конструкцию с дном и заплечиками, имеющую в верхней части внутренний заходный конус. Устанавливаемый узел 2 представляет собой полую цилиндрическую конструкцию с дном и внешним заходным конусом. Внутри устанавливаемого узла 2 на дне подвижно установлены поворотные рычаги 3. Рычаги 3 установлены в плоскости, параллельной дну устанавливаемого узла 2, на осях вращения, расположенных равномерно по окружности, соосной с осью устанавливаемого узла 2. На свободном конце каждого рычага 3 установлены вращающиеся ролики 4, 5. Ролики 4 установлены непосредственно на рычаге 3. Ролики 5 размещены соосно роликам 4, за роликами 4 от центра вращения рычагов 3, на свободном конце консольных упругих стержней 6. Стержни 6 закреплены вторым концом неподвижно на рычагах 3 и размещены внутри рычагов 3. Рычаги 3 подвижно соединены тягами 7. На одном из рычагов 3 подвижно закреплена рукоятка 8. Рукоятка 8 установлена с возможностью вращения от положения "открыто" до положения "закрыто" с опорой на сегмент 9, соосный с осью вращения рычага, на котором закреплена рукоятка. Сумма размеров радиуса Ra - окружности размещения осей вращения рычагов 3 и максимального размера Rb от оси вращения рычага 3 до внешней поверхности ролика 4 меньше радиуса Rd внешней поверхности цилиндра устанавливаемого узла 2:
Ra+Rb<Rd.
При положении рукоятки управления 8 "открыто" (исходном положении) продольная ось поворотного рычага 3 смещена относительно линии соединения оси цилиндра устанавливаемого узла 2 с осью вращения одного из рычагов на угол α1, при котором векторная сумма  и вектора максимального размера
и вектора максимального размера  от оси вращения рычага до внешней поверхности ролика 5 меньше радиуса
от оси вращения рычага до внешней поверхности ролика 5 меньше радиуса 
 - положение "открыто".
- положение "открыто".
Ролики 4, 5 в положении "открыто" размещены внутри узла 2. В положении рукоятки управления "закрыто" векторная сумма векторов  больше вектора
больше вектора  и меньше вектора
и меньше вектора  - радиуса внутренней поверхности цилиндра приемного узла 1 на величину зазора свободного вращения рычагов 3:
- радиуса внутренней поверхности цилиндра приемного узла 1 на величину зазора свободного вращения рычагов 3:
- положение "закрыто."
В положении рукоятки 8 "закрыто" при угле смещения продольной оси ролика относительно линии, соединяющий ось установочного узла с осью вращения ролика α2, ролики 4 расположены внутри узла 2 с опорой на дно, а ролики 5 - внутри узла 1 с опорой на его заплечики за счет упругой деформации стержня 7 на величину k (см. фиг.3, 4):
h2-h1=k,
где h1 - размер от дна приемного узла до заплечиков;
h2 - размер от дна приемного конуса до внешней поверхности ролика, установленного на упругом стержне, в состыкованном положении приемного и устанавливаемого узлов.
Положения рукоятки 8 - фиксированные. Фиксатор положения рукоятки 8 содержит, например, соосную рукоятке подвижную гильзу 10 с закрепленным на ней стержнем 11, пружину 12 с упором одним концом на рукоятку 8, а другим концом - на стержень 11 и шарики 13, размещенные на рукоятке 8 в отверстиях, перпендикулярных оси рукоятки. Стержень 11 содержит коническую поверхность, сопряженную с шариками 13. В положении рукоятки 8 "открыто" и "закрыто" в корпусе 2 выполнены пазы 14, образующие с шариками 13 и стержнем 11 фиксатор положения рукоятки 8. На корпусе 1 выполнен паз, сопряженный, например, с сегментом 9 корпуса 2, обеспечивающий в состыкованном положении корпусов 1, 2 предотвращение их взаимного кручения, а также необходимую ориентацию установленного груза относительно, например, корпуса орбитального корабля.
Устройство работает следующим образом. На внешней поверхности, например, орбитального космического корабля в местах предполагаемой установки доставляемых на орбиту грузов в наземных условиях крепятся приемные узлы 1. Полезный груз закрепляется на устанавливаемый узел 2 и доставляется на орбиту, например, на грузовом космическом аппарате или аппарате типа "Шаттл". Для обеспечения установки груза узел 2 с грузом доставляется вручную, например, оператором к узлу 1 для установки груза на узле 1 и соответственно на внешней поверхности корпуса орбитального корабля. Предварительная взаимная центровка узлов 1 и 2 производится, как показано на фиг.7, за счет взаимодействия внутренней конической поверхности узла 1 и внешней конической поверхности узла 2. В процессе сближения и стыковки узлов 1 и 2 рукоятка 8 зафиксирована в положении "открыто" и ролики 4, 5 размещены внутри узла 2. Стыковка узлов 1 и 2 выполняется до упора внешней поверхности дна узла 2 в дно узла 1. При взаимодействии сегмента 9 с пазом в узле 1 выполняется пространственная ориентация узла 2 относительно узла 1 и соответственно ориентация груза относительно, например, орбитального космического корабля.
Кроме того, при сопряжении паза в узле 1 с сегментом 9 предотвращается взаимное кручение узлов 1 и 2. В положении рукоятки 8 "открыто", как и в положении "закрыто", в узле 2 выполнены пазы 14, в которые частично западают шарики 13 под воздействием конической поверхности подпружиненного стержня 11. В результате рукоятка 8 фиксируется относительно узла 2. Для закрепления узла 2 с грузом на узле 1 гильза 10 с закрепленным на ней стрежнем 11 вручную оттягивается вдоль оси рукоятки 8 от корпуса 2. При этом коническая часть стержня освобождает шарики 13, что позволяет перевести рукоятку 8 из положения "открыто" в положение "закрыто". При снятии усилия оттягивания с рукоятки 8 стержень 11 под воздействием пружины 12 автоматически воздействует конической поверхностью на шарики 13, перемещает их частично в соответствующий паз 14 в узле 2 и осуществляет фиксацию рукоятки в положение "закрыто". При перемещении рукоятки 8 в положение "закрыто" она через тяги 7 вызывает вращение рычагов 3 вокруг их осей вращения.
За счет расположения осей вращения рычагов 3 на окружности, соосной узлу 2, и размещения роликов на размерах, указанных в описании конструкции, при вращении рычагов 3 в положение "закрыто" происходит выдвижение роликов 5 за пределы узла 2 внутрь узла 1. Ролик 4 обкатывается по дну узла 2, не выходя за его пределы. В положениях роликов 5 "закрыто" на узле 1 выполнены заплечики, их внутренняя поверхность расположена ниже верхней точки поверхности ролика 5. Поэтому при закатывании роликов 5 под соответствующие заплечики происходит упругая деформация стержней 7, которая создает усилия фиксации узла 2 на узле 1 путем взаимодействия роликов 4, 5 с заплечиками узла 1 и дном узла 2. Для снятия ранее установленного груза рукоятка 8 переводится в положение "открыто". При этом ролики 4, 5 занимают исходное положение внутри узла 2, и узел 2 свободно вручную снимается вместе с закрепленным на нем грузом с узла 1, соответственно с внешней поверхности корпуса, например, орбитального корабля.
Источники информации
1. Патент США 4955654, 1990.
2. Патент США 5040748, 1991.
3. Патента США 4177964, 1979.
4. Патент Японии 2825278, 1998.
5. Патент США 4664344, 1987.
6. Патент США 5335881.
7. Патент Франции 8813028.
8. Сыромятников B.C. Стыковочные устройства космических аппаратов. - М.: Машиностроение, 1984.
Изобретение относится к космической технике, а именно к средствам обеспечения внекорабельной деятельности оператора. Приемный (ПУ) и устанавливаемый (УУ) узлы устройства выполнены в виде полых цилиндров, сопрягающимися между собой внутренней и внешней поверхностями соответственно. ПУ содержит внутренние заплечики и пазы ориентировки УУ. Поворотные рычаги размещены внутри УУ параллельно его дну и соединены тягами. Оси поворота рычагов расположены на окружности, соосной цилиндру УУ. На концах рычагов установлены ролики, оси вращения которых перпендикулярны осям вращения рычагов. Один ролик установлен непосредственно на рычаге, а второй - на конце консольного упругого стержня, закрепленного на рычаге. В положении рукоятки ручного управления "открыто" ролики рычагов - внутри УУ, а в положении "закрыто" - выдвинуты за пределы УУ внутрь ПУ, при этом ролики, установленные на консолях, закатываются под заплечики ПУ. Изобретение позволяет закреплять полезный груз на внешней поверхности корабля оператором без потребления электрической энергии. 7 ил.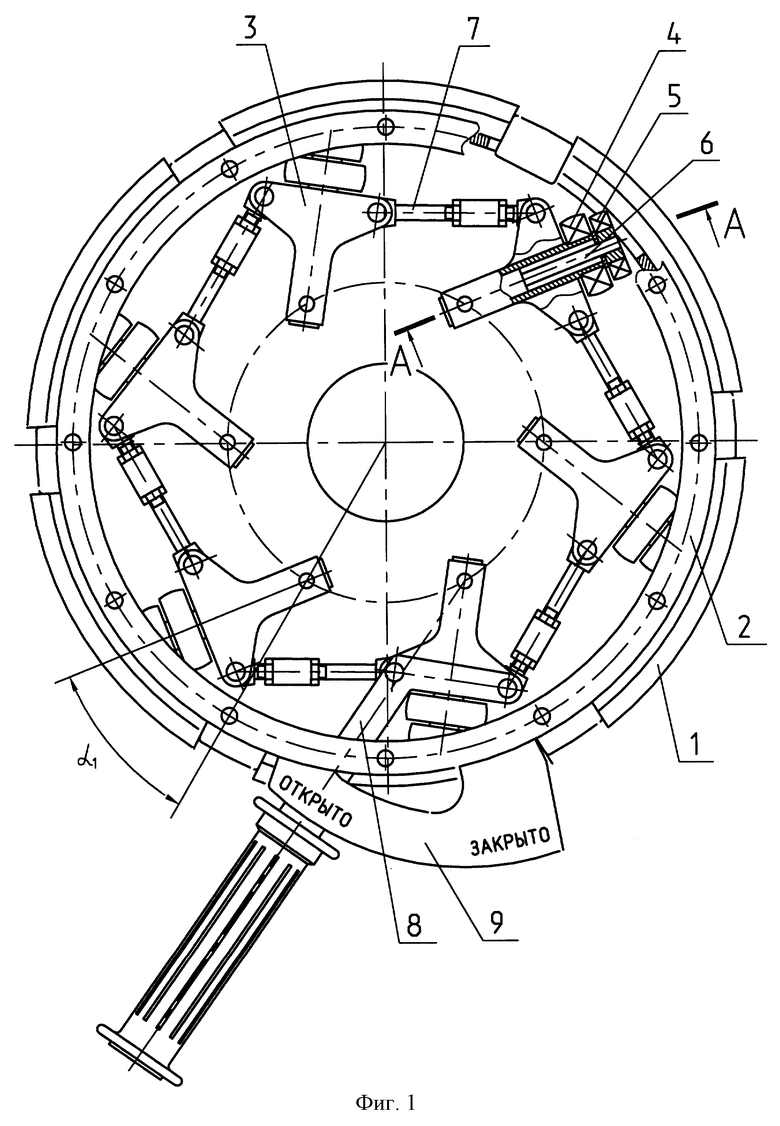
Устройство крепления грузов, преимущественно за пределами находящегося на орбите космического корабля, содержащее приемный узел, устанавливаемый узел, поворотные рычаги, механизм управления, отличающееся тем, что приемный узел выполнен в виде полого цилиндра, снабженного внутренними заплечиками, внутренним приемным конусом и пазами ориентировки устанавливаемого узла, устанавливаемый узел выполнен в виде снабженного внешним заходным конусом полого цилиндра, сопрягаемым внешней поверхностью с внутренней поверхностью приемного узла, поворотные рычаги соединены тягами и размещены внутри устанавливаемого узла параллельно его дну, оси поворота рычагов расположены на окружности, соосной цилиндру устанавливаемого узла, а на конце каждого рычага внутри устанавливаемого узла размещены как минимум два ролика, оси вращения роликов перпендикулярны оси вращения рычага, один ролик размещен непосредственно на рычаге, а второй, соосный первому, размещен на конце консольного упругого стержня, противоположный конец которого закреплен на рычаге, сумма радиуса окружности размещения осей вращения рычагов и максимального расстояния от оси вращения рычага до внешней поверхности ролика, установленного непосредственно на рычаге, меньше внешнего диаметра устанавливаемого узла, а сумма радиуса окружности размещения осей вращения рычагов и максимального расстояния от оси вращения рычага до внешней поверхности ролика, установленного на упругом стержне, больше внешнего диаметра устанавливаемого узла, но меньше внутреннего диаметра приемного узла на величину зазора для свободного вращения рычага с роликами, радиус роликов, размещенных непосредственно на рычагах, равен расстоянию от дна устанавливаемого узла до оси вращения ролика, расстояние от плоскости сопряжения днищ устанавливаемого и приемного узлов до внутренней поверхности заплечиков приемного узла меньше максимального расстояния от указанной плоскости до внешней поверхности ролика, установленного на упругом стержне, на величину упругой деформации стержня, на внешней поверхности устанавливаемого узла выполнены выступы, сопрягаемые с пазами приемного узла, механизм привода выполнен в виде рукоятки ручного управления, закрепленной на одном из поворотных рычагов, с фиксацией в двух положениях "открыто"-"закрыто", в положении рукоятки ручного управления "открыто" продольная ось каждого рычага смещена относительно линии, соединяющей ось устанавливаемого узла с осью вращения рычага, на угол, при котором ролики, установленные на рычаге, расположены внутри устанавливаемого узла.
| US 5040748 А, 20.08.1991 | |||
| US 4955654 А, 11.09.1990 | |||
| US 4177964 А, 11.12.1979 | |||
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ И ОТДЕЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ ОТ КОСМИЧЕСКОГО ОБЪЕКТА | 1999 |
|
RU2151086C1 |
| RU 94021369 A1, 27.06.1996 | |||
| УСТРОЙСТВО РУЧНОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ГРУЗОВ, ПРЕИМУЩЕСТВЕННО ЗА ПРЕДЕЛАМИ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2165381C1 |

