Изобретение относится к космической технике, а именно к средствам обеспечения внекорабельной деятельности оператора.
Известен аппарат по изобретению [1], содержащий узлы крепления за стержневую конструкцию космического корабля и узел фиксации ног оператора, преимущественно для установки на подвижных элементах конструкции типа манипулятор, при работах на наружных конструкциях космического корабля, а также площадку крепления оператора с фиксацией за ноги оператора.
Однако указанный аппарат не содержит узлов и средств установки грузов и управления положением грузов, манипулирование которыми, при необходимости, космонавт должен выполнять вне космического корабля.
Наиболее близким к изобретению по технической сущности является приспособление ручного управления положением грузов за пределами космического корабля [2], содержащее телескопическую балку, прикрепленную с возможностью поворота в двух перпендикулярных относительно друг друга осях к космическому кораблю, установочный замок, поворотную площадку с осью вращения, перпендикулярной установочной поверхности, узлы крепления оператора в виде разъемного приспособления для оператора, узел крепления груза, закрепленный на поворотной площадке с осью вращения, перпендикулярной оси вращения поворотной площадки, и приводной рычаг разворотов телескопической балки.
Приспособление обеспечивает ручное управление положением грузов без применения приводной системы, потребляющей электрическую энергию космического корабля, ему характерны незначительная подверженность помехам, им обеспечивается механический зажим при креплении на космическом корабле, отсутствует потребность в электрических соединителях с кораблем.
Однако размещение оси вращения подвижной площадки за спиной оператора, подвижное крепление телескопической балки внизу между ног оператора, фиксация спины оператора за стойку подвижной площадки и разворот телескопической балки с приложением усилий ног оператора создают ему серию неудобств:
зона свободных движений оператора резко ограничена;
осуществление поворота подвижной площадки в горизонтальной плоскости ногами оператора приводит к необходимости перебирать ногами с приложением усилий ног и спины для преодоления инерции груза, появляется возможность ушиба о балку телескопической руки, расположенную между ног оператора;
приведение в движение балки от рук оператора, при котором точка крепления балки, точка приложения усилий руки и точка нахождения груза создают рычаг 2-го рода, при котором резкое несанкционированное движение рук или ног оператора приводит к резкому перемещению груза с возможностью повреждения элементов конструкции космического корабля, расположенных в зоне действия балки;
необходимость в круговой опорной плоскости для ног оператора затрудняет доступ к установочному замку крепления к корпусу космического корабля;
устройство предполагает крепление груза только на конструкции типа "балка".
Техническим результатом данного изобретения является создание благоприятных условий для оператора при установке устройства на месте эксплуатации, например на внешней поверхности космического корабля и при работах с грузом.
Технический результат достигается тем, что в устройстве ручного управления положением грузов, преимущественно за пределами находящегося на орбите космического корабля, содержащего установочный замок, поворотную площадку с осью вращения, перпендикулярной установочной поверхности, узлы крепления оператора, узел крепления груза, закрепленный на поворотной площадке с осью вращения, перпендикулярной оси вращения поворотной площадки, узлы управления положением груза и оператора, узлы крепления оператора расположены на поворотной площадке, выполнены в виде элементов фиксации ног оператора и размещены по другую сторону относительно оси вращения поворотной площадки от узла крепления груза, узлы управления положением груза выполнены в виде механизмов ручного управления и расположены на поворотной площадке в зоне, доступной рукам оператора, установочный замок выполнен в виде рычажного механизма ручного управления.
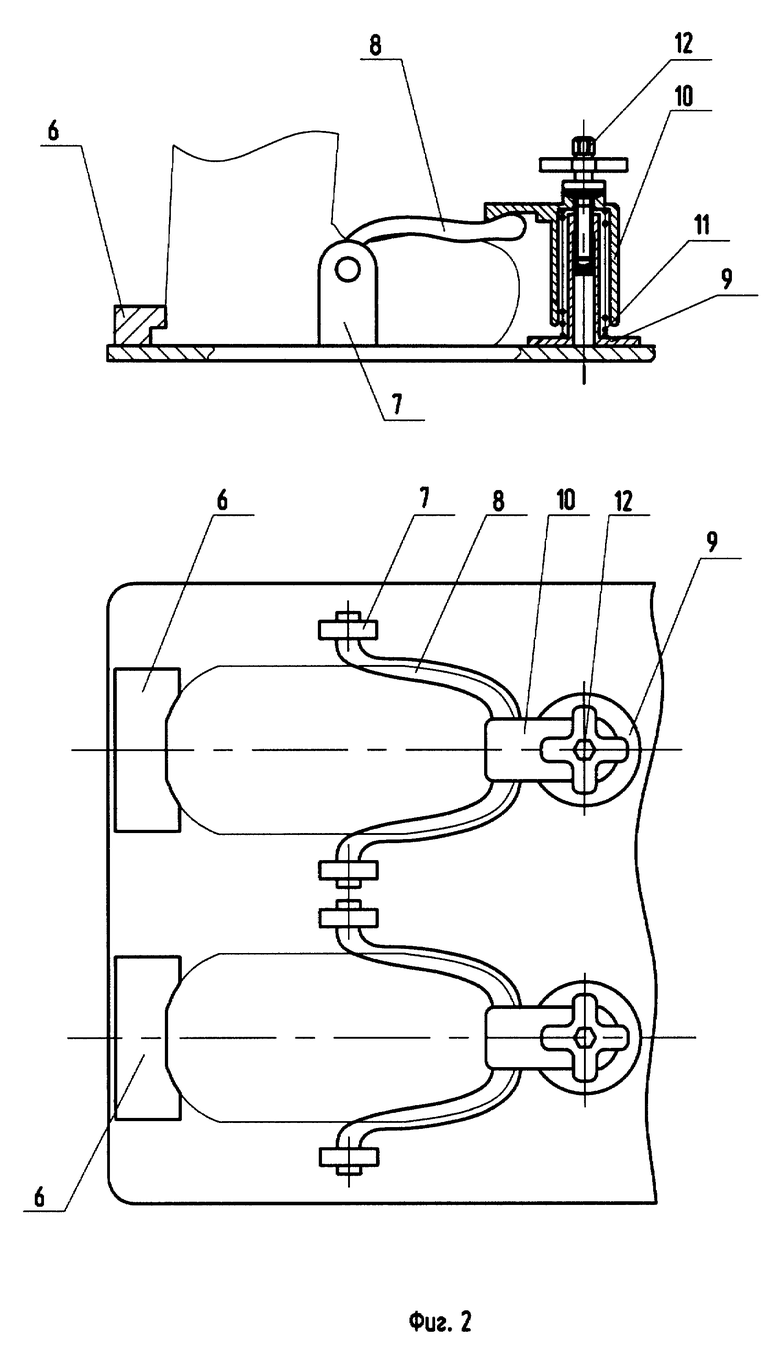
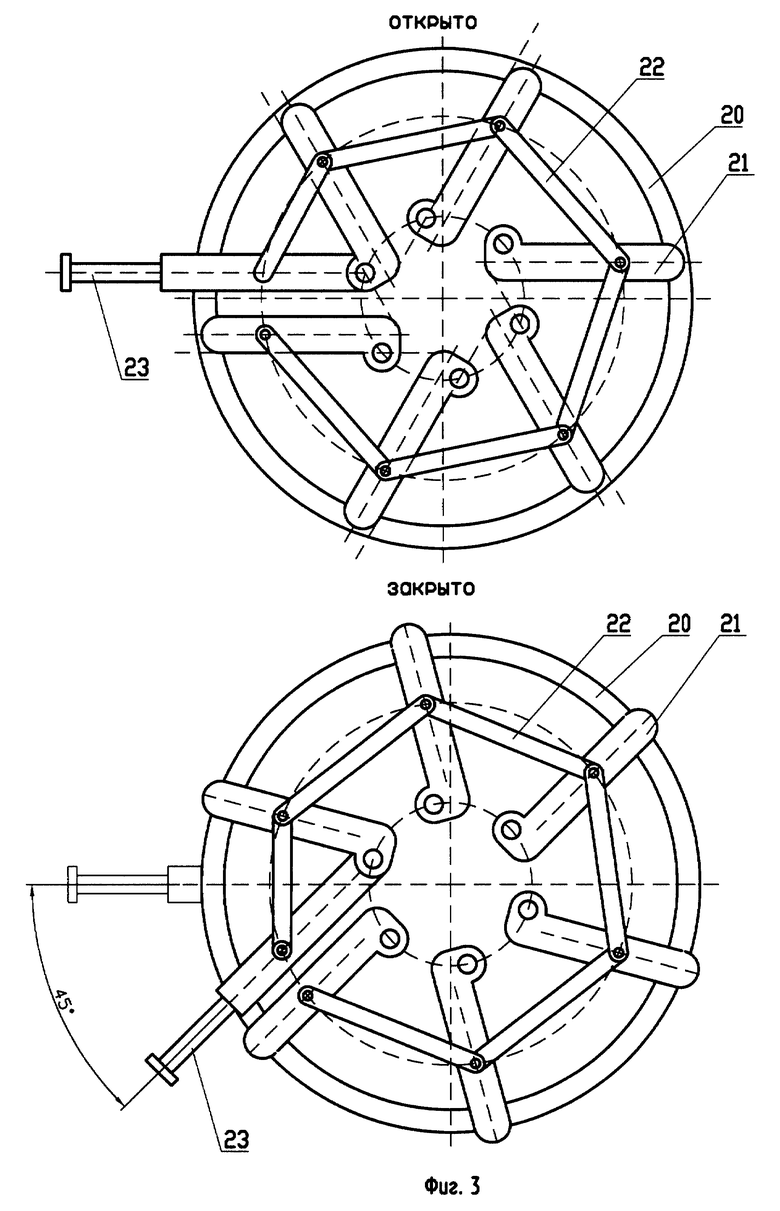
Устройство поясняется чертежами, где на фиг. 1 показана конструкция устройства; на фиг. 2 - конструкция узлов крепления оператора; на фиг. 3 - схема конструкции установочного замка.
Устройство содержит неподвижную опору 1, на которой закреплен установочный замок 2 и поворотная площадка 3. Поворотная площадка 3 установлена на подшипниках 4 подвижно относительно оси 5 опоры 1. На поворотной площадке 3 установлены два узла фиксации ног оператора. Каждый узел фиксации ног оператора предлагается выполнить в виде ограничителя движения пятки 6, стойки 7 и подвижной скобы крепления носка обуви 8, а также замка скобы, содержащего стойку 9, подвижной упор 10, пружину 11 и винт крепления скобы 12, оснащенной крестовиной и шестигранником. На верхнем конце поворотной площадки в зоне, доступной рукам оператора при фиксированном положении ног оператора, размещена рукоятка 13 управления разворотом поворотной площадки 3 вокруг оси 5. Рукоятка 13 механически соединена с шестеренчатым понижающим редуктором 14 передачи вращения от рукоятки к поворотной площадке. Входная шестерня редуктора 14 неподвижно закреплена на рукоятке 13 соосно с ней, выходная шестерня установлена на неподвижной оси 5. Узел крепления груза 15 расположен на поворотной площадке 3 в зоне, доступной рукам оператора, подвижно относительно оси 16, перпендикулярной оси 5, и содержит винты крепления груза 17, оснащенные крестовиной и шестигранником. Ось 16 крепления груза размещена перед узлами крепления оператора таким образом, что ось вращения 5 оказывается между узлами крепления оператора и груза.
На верхнем конце поворотной площадки в зоне, доступной рукам оператора, размещена рукоятка 18 управления разворотом узла крепления груза 15 вокруг оси 16. Рукоятка 18 механически соединена с шестеренчатым понижающим редуктором 19 передачи вращения от рукоятки 18 к узлу крепления груза 15. Входная шестерня редуктора 19 неподвижно закреплена на рукоятке 18 соосно с ней, выходная шестерня - на узле крепления груза 15 соосно оси 16.
Установочный замок 2 содержит корпус 20, рычаги 21, подвижно установленные на корпусе 20, со смещенными осями поворота относительно оси корпуса 20, тяги 22 и рукоятку управления 23 с осью вращения соосной оси вращения одного из рычагов 21. Тяги 22 подвижно соединяют рукоятку 23 и рычаги 21.
Устройство работает следующим образом. Для установки устройства на рабочем месте эксплуатации, имеющем приемный цилиндр с заплечиками, предварительно рукоятка 23 переводится в положение "открыто", при этом рычаги 21 тягами 22 устанавливаются внутри установочного замка 2.
После установки устройства в приемный цилиндр рабочего места рукоятка 23 переводится в положение "закрыто". При этом за счет смещения центров вращения рычагов 21 относительно оси корпуса 20 под воздействием тяг 22 рычаги 21 выводятся за пределы корпуса 20, производя захват устройства за заплечики, имеющиеся на приемном цилиндре рабочего места, тем самым фиксируя установку устройства. При переводе рукоятки в положение "открыто" производится расфиксация.
Оператор, например космонавт, устанавливает ноги с упором в ограничители движения пятки 6, разворотом скобы крепления носка обуви 8 вокруг оси стойки 7 обжимает носок обуви и крепит скобу подвижным упором 10 посредством винта 12. При отворачивании винта 12 под действием пружины 11 подвижной упор 10 освобождает скобу 12, в этом случае скоба может быть развернута, освобождая ногу оператора. Винт 12 содержит крестовину и внешний шестигранник для обеспечения фиксации оператора вручную или гаечным ключом.
Посредством применения винтов крепления груза 17, оснащенных крестовиной и шестигранником, осуществляется крепление полезного груза на узле крепления груза 15 вручную или гаечным ключом.
Вращением рукой рукоятки 13 через понижающий шестеренчатый редуктор 14 оператор осуществляет разворот поворотной площадки с грузом вокруг оси 5. При этом оператор всегда остается лицом к грузу. Вращая рукой рукоятку 18, оператор осуществляет разворот груза вокруг перпендикулярной оси 16 через понижающий шестеренчатый редуктор 19. Имея свободные руки, оператор, при необходимости, осуществляет оба разворота одновременно. Понижающие шестеренчатые редукторы 14 и 19 передачи вращения от рукояток управления к исполнительным механизмам обеспечивают плавное перемещение грузов.
Литература
1. Патент США N 5335881.
2. Заявка Германии DE 19525359 C1.
3. Патент США N 4079904.
4. Патент США N 5501114.
5. Патент США N 4373690.
6. Патент США N 4955654.
7. Патент США N 4177964.
8. Патент США N 5813632.
9. Патент США N 4664344.
10. Патент EP 0858946 A1.
11. Патент EP 0481888 A1.
12. Сыромятников B.C. Стыковочные устройства космических аппаратов, М., Машиностроение, 1984.
13. Справочник по кранам, под ред. Гохберга М.М., Машиностроение. Ленинградское отделение, т. 2, 1998.
14. Петухов П.З., Ксюнин Г.П., Сермин Л.Г. Специальные раны, М., Машиностроение, 1985.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ, ПРЕИМУЩЕСТВЕННО ЗА ПРЕДЕЛАМИ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2167083C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ, ПРЕИМУЩЕСТВЕННО ЗА ПРЕДЕЛАМИ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2167085C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ, ПРЕИМУЩЕСТВЕННО ЗА ПРЕДЕЛАМИ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2167084C1 |
| ИНСТРУМЕНТ ДЛЯ ЗАЖИМА, ПРЕИМУЩЕСТВЕННО ДЛЯ РАБОТЫ В ТРУДНОДОСТУПНЫХ МЕСТАХ | 2003 |
|
RU2243082C2 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ И ОТДЕЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ ОТ КОСМИЧЕСКОГО ОБЪЕКТА | 1999 |
|
RU2151086C1 |
| ЭЛЕКТРИЧЕСКИЙ СОЕДИНИТЕЛЬ | 2003 |
|
RU2256267C2 |
| УСТРОЙСТВО КРЕПЛЕНИЯ, ПРЕИМУЩЕСТВЕННО К КОРПУСУ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2193995C2 |
| ТРАНСФОРМИРУЕМАЯ КОНСТРУКЦИЯ | 2000 |
|
RU2167789C1 |
| УСТРОЙСТВО СТЫКОВКИ КОСМИЧЕСКИХ МОДУЛЕЙ | 2003 |
|
RU2269462C2 |
| ЗАЖИМ ДЛЯ КРЕПЛЕНИЯ ИЗДЕЛИЯ | 1999 |
|
RU2177567C2 |
Изобретение относится к космической технике, а именно к средствам обеспечения внекорабельной деятельности оператора. Предлагаемое устройство содержит установочный замок в виде рычажного механизма ручного управления, поворотную площадку с осью вращения, узел крепления груза, расположенный на поворотной площадке, с осью вращения, перпендикулярной оси вращения этой площадки. Расположенные на поворотной площадке узлы крепления оператора выполнены в виде элементов фиксации ног оператора и размещены по другую сторону от узла крепления груза относительно оси вращения поворотной площадки. Узлы управления положением груза на площадке выполнены в виде механизмов ручного управления и расположены в зоне, доступной рукам оператора. Изобретение обеспечивает создание благоприятных условий для оператора при установке устройства на месте эксплуатации, например на внешней поверхности космического корабля и при работах с грузом. 3 ил.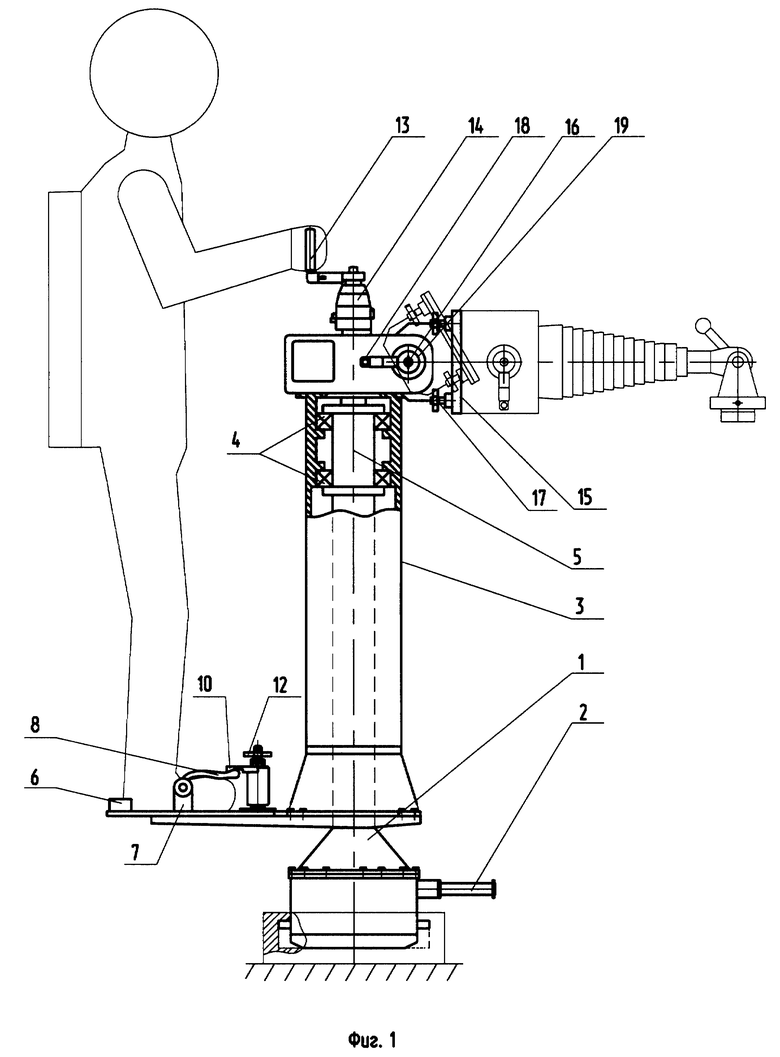
Устройство ручного управления положением грузов, преимущественно за пределами находящегося на орбите космического корабля, содержащее установочный замок, поворотную площадку с осью вращения, перпендикулярной установочной поверхности, узлы крепления оператора, узел крепления груза, закрепленный на поворотной площадке, с осью вращения, перпендикулярной оси вращения поворотной площадки, узлы управления положением груза и оператора, отличающееся тем, что узлы крепления оператора расположены на поворотной площадке, выполнены в виде элементов фиксации ног оператора и размещены по другую сторону от узла крепления груза относительно оси вращения поворотной площадки, узлы управления положением груза выполнены в виде механизмов ручного управления и расположены на поворотной площадке в зоне, доступной рукам оператора, при этом установочный замок выполнен в виде рычажного механизма ручного управления.
| DE 19525359 C1, 05.06.1996 | |||
| US 5335881 A, 09.08.1994 | |||
| US 5501114 A, 03.02.1994 | |||
| СЫРОМЯТНИКОВ В.С | |||
| Стыковочные устройства космических аппаратов | |||
| - М.: Машиностроение, 1984. |

