Изобретение относится к области измерения угловых перемещений и может быть использовано в промысловой геофизике для определения траектории ствола скважины (азимутов, зенитных углов) и углов поворота прибора в скважине.
Известны способы определения азимутов и зенитных углов скважин, основанные на эффекте гироскопа, т.е. способности инертной массы сохранять свою ориентацию при вращении вокруг своей оси (Исаченко В.Х. Инклинометрия скважин. - М.: Недра, 1987). Недостатком инклинометров, реализующих эти способы, является низкая виброустойчивость и соответственно большая погрешность измерений при внешних динамических воздействиях.
Анализ известных конструкций инклинометрических преобразователей позволяет выделить следующие пути повышения виброустойчивости:
увеличение площади чувствительного элемента датчика путем выполнения его сложной конфигурации или выполнение сложной конфигурации полости, в которой размещен чувствительный элемент (а.с. СССР N 648721, М. кл. E 21 В 47/022, 1977).
выполнение корпуса сложной внутренней конфигурации - уступы, отсеки, перегородки (а.с. СССР N 1155732, М. кл. E 21 B 47/022, 1983).
В первом случае решается задача демпфирования чувствительного элемента, но не исключается движение жидкости относительно полости корпуса при воздействии динамических помех. Во втором случае частично ограничивается движение жидкости относительно полости устройства, но остается сложность конструкции.
Известен инклинометр (а.с. СССР N 1446288, М. кл. E 21 B 47/02, 1988), наиболее приближенный по технической сущности к заявляемому решению и взятый за прототип.
Устройство содержит сбалансированное по отношению к оси вращения корпуса прибора инерционное тело, внутренняя полость которого снабжена симметричным относительно оси вращения поплавком. Инерционное тело установлено на опорах вращения соосно с продольной осью корпуса. Устройство снабжено двумя ортогональными маятниками, на осях вращения которых размещены два основных датчика перемещений, а на оси вращения инерционного тела размещен дополнительный датчик перемещений. При этом само инерционное тело помещено в жидкость. Недостатком данного инклинометра является то что, инерционное тело удерживается от вращения вместе с корпусом только за счет разгрузки опор, на которых закрепляется. При этом вращение на инерционную массу будет передаваться через жидкость, в которой она размещена. Кроме этого, требуется высокая точность центрирования ее в опорах, которая может нарушится от внешних воздействий в процессе работы, что повлечет снижение точности измерений.
Задачей настоящего изобретения является повышение точности измерений азимута и угла вращения скважинных приборов за счет демпфирования инерционной массы посредством вещества, движущегося по поверхности последней.
Поставленная задача решается следующим образом.
Устройство измерения азимута ориентации и угла вращения скважинных приборов, содержащее герметичный цилиндрический корпус с инерционной массой, установленной на продольной оси, и два преобразователя углов, дополнительно снабжено полой камерой с полыми стенками, установленной коаксиально внутри корпуса, образуя верхний и нижний торцевые отсеки, в нижнем торцевом отсеке размещен компрессор, в верхнем торцевом отсеке по оси устройства в торце полой камеры установлен полый вал с радиальными отверстиями, с возможностью свободного вращения вокруг своей продольной оси, на котором установлен один из преобразователей углов, внутри полой камеры посредством гибкого соединения на валу подвешен полый конус, на основании которого размещен второй преобразователь углов, а инерционная масса выполнена в виде конуса с ребристой поверхностью, установленного с зазором по образующей внутри полого конуса на штыре с возможностью свободного вращения вокруг своей оси. При этом в нижнем торце полой камеры и в центре нижнего торца полой камеры выполнены отверстия, посредством которых полость вала, полости стенок камеры и ее внутренняя полость сообщаются между собой и с полостью нижнего торцевого отсека.
Основное отличие предложенного технического решения от известных заключается в том, что инерционное тело удерживается от вращения вместе с корпусом прибора стекаемой по его поверхности жидкостью или воздухом, нагнетаемыми компрессором, установленным внутри корпуса устройства.
При этом конструкция инерционной массы в виде конуса с ребристой поверхностью обеспечивает надежное демпфирование относительно окружающей среды.
Так при вертикальном положении устройства и вращении его вокруг продольной оси (вызванным закручиванием или раскручиванием кабеля при спуске/подъеме прибора) на инерционное тело передается крутящий момент Fт, обусловленный трением в упоре: Fт = К • P, где К - коэффициент трения, P - вес инерционной массы.
Воздух, стекаемый по поверхности инерционной массы, обуславливает возникновение силы Кориолиса FК: FК= 2m • v • ω, где m - масса стекаемого вещества, v - скорость его движения, ω - угловая скорость, передаваемая крутящим моментом.
Для исключения вращения инерционного тела относительно окружающей прибор среды необходимо выполнение условия FR>FТ, которое обеспечивается предложенным техническим решением. Элементы конструкции устройства просты в изготовлении, не требуют специальных материалов и оборудования. Таким образом, предложенное техническое решение отличается технической применимостью, низкой стоимостью и высокой степенью достижения поставленной цели.
На чертеже представлено устройство измерения азимута угла вращения скважинных приборов.
Устройство содержит герметичный цилиндрический корпус 1, внутри которого коаксиально установлена полая камера 2 с полыми стенками 3, образуя верхний торцевой отсек 4 и нижний торцевой отсек 5 в корпусе 1. В нижнем торцевом отсеке 5 размещен компрессор 6 для нагнетания воздуха (жидкости). В верхнем торцевом отсеке 5 по оси устройства в торце полой камеры 2 установлен свободно вращающийся полый вал 7 с радиальными отверстиями 8. Внутри полой камеры 2 на гибком соединении 9 к валу 7 подвешен полый конус 10. В центре основания полого конуса 10 имеется штырь 11, на котором установлена инерционная масса 12. Инерционная масса 12 выполнена в виде конуса с ребристой поверхностью и установлена с зазором по образующей внутри полого конуса с возможностью свободного вращения вокруг своей оси. В нижнем торце полой камеры 2 и в основании полого конуса 10 выполнены отверстия 13 и 14 соответственно, посредством которых полость стенок 3 камеры 2, полость вала 7, внутренняя полость камеры 2, полость конуса 10 и полость нижнего торцевого отсека 5 сообщаются между собой. На основании полого конуса 10 установлен преобразователь углов 15, связанный с инерционной массой 12, а на свободном конце вала 7 установлен преобразователь углов 16, связанный с корпусом 1 устройства.
Устройство работает следующим образом.
Прибор на кабеле опускается на забой исследуемой скважины. Перед началом измерений на забое скважины фиксируются показания преобразователей углов 15 и 16, которые принимаются за начало отсчета. Затем включается компрессор 6. И производится подъем прибора на кабеле в точку измерения. Воздух (жидкость), нагнетаемый компрессором 6 из нижнего торцевого отсека 5, по полым стенкам 3 через радиальные отверстия 8 вала 7 поступает в полость конуса 10 и обтекает инерционное тело 12, сжимая его.
При подъеме прибора последний перемещается по стволу скважины, при этом ствол может быть как прямым, так и криволинейным в пространстве. Кроме того, прибор сам в процессе перемещения совершает вращательное движение вследствие закручивания (раскручивания) кабеля. В этом случае при перемещении прибора по криволинейному стволу скважины инерционная масса 12 на штыре 11 удерживается от вращения вместе с прибором потоком воздуха (жидкости), обтекаемым его, и датчик 15 измеряет угол поворота корпуса 1 относительно инерционной массы 12, который соответствует углу поворота ствола скважины в пространстве, а датчик 16 измеряет угол вращения прибора, обусловленный закруткой (раскруткой) кабеля.
При перемещении скважинного прибора по вертикальному стволу скважины датчик 15 измеряет угол поворота прибора, обусловленный закручиванием (раскручиванием) кабеля. По достижении прибором заданной точки измерения показания датчиков 15 и 16 фиксируются. В это время компрессор 6 выключается, чтобы исключить помехи при проведении замеров. После выполненных измерений компрессор 6 включается и прибор перемещается в следующую точку наблюдения.
При вращении устройства вместе с корпусом скважинного прибора вокруг своей оси на воздух (жидкость), находящийся в камере, от стенок корпуса передается крутящий момент. Учитывая малые скорости вращения прибора в скважине и изменения кривизны проекции ствола скважины на горизонтальную плоскость и слабую связь воздуха со стенками корпуса, а также дискретность измерений, величина крутящего момента, передаваемого воздуху от корпуса прибора, будет несущественной и, следовательно, влияние крутящего момента, им передаваемого на инерционное тело, будет пренебрежимо мало. Задавая соответствующий режим работы компрессора, предлагаемая конструкция обеспечит достаточно высокую точность измерения азимута и угла вращения скважинного прибора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКВАЖИННЫЙ СЕЙСМИЧЕСКИЙ ЗОНД "СПАН-6" | 2005 |
|
RU2305299C2 |
| ЦЕНТРИРУЮЩЕЕ ПРИЖИМНОЕ УСТРОЙСТВО СКВАЖИННЫХ ПРИБОРОВ | 2001 |
|
RU2235201C2 |
| СКВАЖИННЫЙ СЕЙСМИЧЕСКИЙ ПРИБОР С ЦЕНТРИРУЮЩИМ ПРИЖИМОМ СПАН-4 | 2003 |
|
RU2267141C2 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ АЗИМУТА УГЛА УСТАНОВКИ ОТКЛОНИТЕЛЯ В ВЕРТИКАЛЬНЫХ СТВОЛАХ СКВАЖИН | 2009 |
|
RU2434132C2 |
| СКВАЖИННЫЙ СЕЙСМИЧЕСКИЙ ПРИБОР | 2001 |
|
RU2235346C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОГО АЗИМУТА В ПРОЦЕССЕ БУРЕНИЯ | 2009 |
|
RU2387827C1 |
| СКВАЖИННЫЙ СЕЙСМИЧЕСКИЙ ЗОНД "СПАН-9" | 2014 |
|
RU2574319C1 |
| ИНКЛИНОМЕТР ДЛЯ НИСХОДЯЩИХ СКВАЖИН | 2006 |
|
RU2352775C2 |
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНОГО АЗИМУТА В ПРОЦЕССЕ БУРЕНИЯ | 2007 |
|
RU2349938C1 |
| СКВАЖИННЫЙ АКУСТИЧЕСКИЙ СКАНЕР | 2015 |
|
RU2614193C1 |
Изобретение относится к промысловой геофизике для определения траектории ствола скважины и углов поворота прибора для измерения угловых перемещений в скважине. Техническим результатом изобретения является повышение точности измерений азимута и угла вращения скважинных приборов за счет демпфирования инерционной массы посредством вещества, движущегося по поверхности последней. Для этого инерционная масса выполнена в виде конуса с ребристой поверхностью, установленного с зазором по образующей внутри полого конуса, подвешенного на полом валу внутри полой камеры. Камера установлена внутри корпуса и образует верхний и нижний торцевые отсеки. В нижнем торцевом отсеке установлен компрессор. В верхнем торцевом отсеке установлен полый вал с радиальными отверстиями с возможностью свободного вращения вокруг своей оси. На валу установлен один преобразователь углов, на основании полого конуса - второй преобразователь углов. Инерционная масса удерживается от вращения вместе с корпусом прибора стекаемой по его поверхности жидкостью или воздухом, нагнетаемыми компрессором. 1 ил.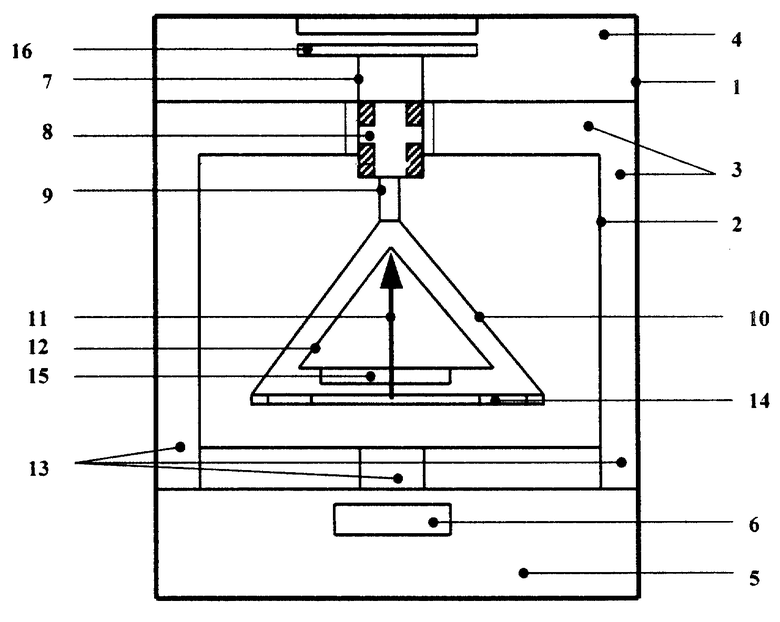
Устройство измерения азимута и угла вращения скважинных приборов, содержащее герметичный цилиндрический корпус с инерционной массой, установленной на продольной оси, и два преобразователя углов, отличающееся тем, что оно дополнительно снабжено полой камерой с полыми стенками, установленной коаксиально внутри корпуса, образуя верхний и нижний торцевые отсеки, причем в нижнем торцевом отсеке размещен компрессор, а в верхнем торцевом отсеке по оси устройства в торце полой камеры установлен полый вал с радиальными отверстиями с возможностью свободного вращения вокруг своей оси, на котором установлен один из преобразователей углов, внутри полой камеры посредством гибкого соединения на валу подвешен полый конус, на основании которого размещен второй преобразователь углов, а инерционная масса выполнена в виде конуса с ребристой поверхностью, установленного с зазором по образующей внутри полого конуса с возможностью свободного вращения вокруг своей оси, при этом в нижнем торце и в центре нижнего торца полой камеры выполнены отверстия, посредством которых полость вала, полости стенок камеры, полость камеры и ее внутренняя полость сообщаются между собой и с полостью нижнего торцевого отсека.
| Инклинометр | 1987 |
|
SU1446288A1 |
| Устройство для определения зенитного и визирного углов в скважине | 1989 |
|
SU1652523A1 |
| Устройство для контроля параметров траектории скважины | 1983 |
|
SU1155732A2 |
| Инклинометр | 1977 |
|
SU648721A1 |
| Устройство ориентирования датчиков в геофизических приборах | 1985 |
|
SU1346772A1 |
| Устройство для определения угла наклона | 1978 |
|
SU792074A1 |
| Датчик угла наклона | 1983 |
|
SU1204706A1 |
| УСТРОЙСТВО ДЛЯ ЗАМЕРА АЗИМУТА СКВАЖИНЫ | 1990 |
|
RU2013535C1 |
| RU 2004789 C1, 15.12.1993 | |||
| US 4385449 A, 31.05.1983 | |||
| Устройство для защиты поверхности, не подлежащей покрытию | 1988 |
|
SU1595571A1 |
| DE 2849633 A1, 15.01.1983 | |||
| ИСАЧЕНКО В.Х | |||
| Инклинометрия скважин | |||
| - М.: Недра, 1987. | |||
