Изобретение относится к геологоразведочной технике и может быть использовано для определения угла про- с.транственного положения буровой скважины в породах, обладающих магнитной восприимчикостью.
Цель изобретения - расширение функциональных но-чможностей за счет обеспечения измерения азимута в магнитных и немагнитных средах и повышение точности измерения путем разгрузки опор вращения,
На чертеже представлена кинематическая схема инклинометра.
Инклинометр содержит корпус 1, в котором установлено сбалансированное по отношению к оси вращения инерционное тело 2, внутренняя полость которого снабжена симметричньм относительно оси вращения поплавком 3, Инерционное тело 2 установлено на опорах 4 вращения, а ось вращения инерционного тела 2 совпадает с продольной осью корпуса 1. На оси враще ния инерционного тела 2 размещен дополнительный датчик 5 угла поворота. Кроме того, в корпусе 1 установлены два ортогональных (одностепенных) маятника 6 и 7, расположенные в перпендикулярных продольной оси корпуса 1 полостях, с двумя основными датчиками 8 и 9 углов поворота на осях вращения маятников. Инерционное тело 2 помещено в жидкость 10 и за счет поплавка 3, симметричного относительно оси вращения, находится во взвешенном состоянии.
Инклинометр работает следующим образом.
Перед началом измерения в устье скважины прибор ориентируют по азимуту по метке на корпусе 1 относительно выбираемого направления и фиксируют значение угла инерционного тела 2 по сигналу дополнительного датчика 5 угла поворота, которые принимают за начало отсчета. Затем на кабеле производится спуск прибора в скважину с непрерывной регистрацией данньк с датчиков 5, 8 и 9 углов поворота. При спуске корпус 1 прибора совершает круговые вращательные движения относительно стенок скважины вследствие трения промывочной жидкости о стенки корпуса, Наличця момента закручивания кабеля и т.д. Благодаря статической разгрузке опор 4 и тщательной балансировке инерци
онное тело 2 сохраняет первоначальное положение относительно устья скважины, а с дополнительного датчика 5 снимается сигнал, пропорциональный углу вращения корпуса 1 относительно инерционного тела 2. С основных датчиков 8 и 9 снимается сигнал, пропорциональный углам поворота |J, и г маятников 6 и 7. При этом азимут (ei) и зенитный угол (9) вычисляют по формулам
5
0
0
5
0
5
5
0
5
d, arete tsMinCj i ts cosV . . ° tgfjjcos( tg/,sin(
0 arctgij if
.
(2)
где
p.. p.
-угол поворота инерционного тела 2 относительно корпуса 1;
-углы поворотов маятников 6 и 7.
Применение в качестве датчиков 5, 8 и 9 углов поворота бесконтактных синусно-косинусных трансформаторов позволяет непосредственно снимать ригналы, пропорциональные тригонометрическим функциям синуса, косинуса, с взятием их отнощения - тангенса. Наличие вычислительного устройства в наземном пульте позволяет легко решить формулы (1) и (2).
Снабжение инклинометра сбаланси- .рованным по отиошению к оси вращения инерционньм телом с дополнительным датчиком угла поворота, размещенным на оси вращения инерционного тела, с одновременным снятием показаний двух основных датчиков углов поворота на осях вращения ортогональных маятников позволяет отказаться от применения традиционных магнлточув- ствительных элементов и обеспечивает измерение азимута как в магнитных, так и немагнитных средах, что расширяет функциональные возможности инклинометра.
Размещение инерционного тела в жидкости и снабжение его симметричным поплавком позволяет практически разгрузить опоры вращения как от сил тяжести, так и инерционных сил, возникающих при движении инклинометра в скважине, что повышлут точность измерений.
Формула изобр тения
1. Инклинометр, содер :.ч1Ч11й корпус, в котором установлены дна ортогональ3U46288 .
ных маятника с двумя основными дат-совпадает с продольной осью корпуса,
чинами углов поворота на осях враще-а дополнительный датчик угла поворо ния, отличающийся тем,та размещен на оси вращения инерциончто, с целью расширения функциональ-ного тела, ных возможностей за счет обеспечения
измерения азимута в магнитных и не- 2. Инклинометр по п. I, отлимагнитных средах, он снабжен установ-чающийся тем, что, с целью
ленным в корпусе на опорах вращенияповышения точности измерения за счет
сбалансированным по отношению к оси юразгрузки опор вращения, инерционное
вращения инерционным телом и дополни-тело помещено в жидкость, а его внуттельным датчиком угла поворота, при(ренняя полость снабжена симметричным
этом ось вращения инерционного телаотносительно оси вращения поплавком.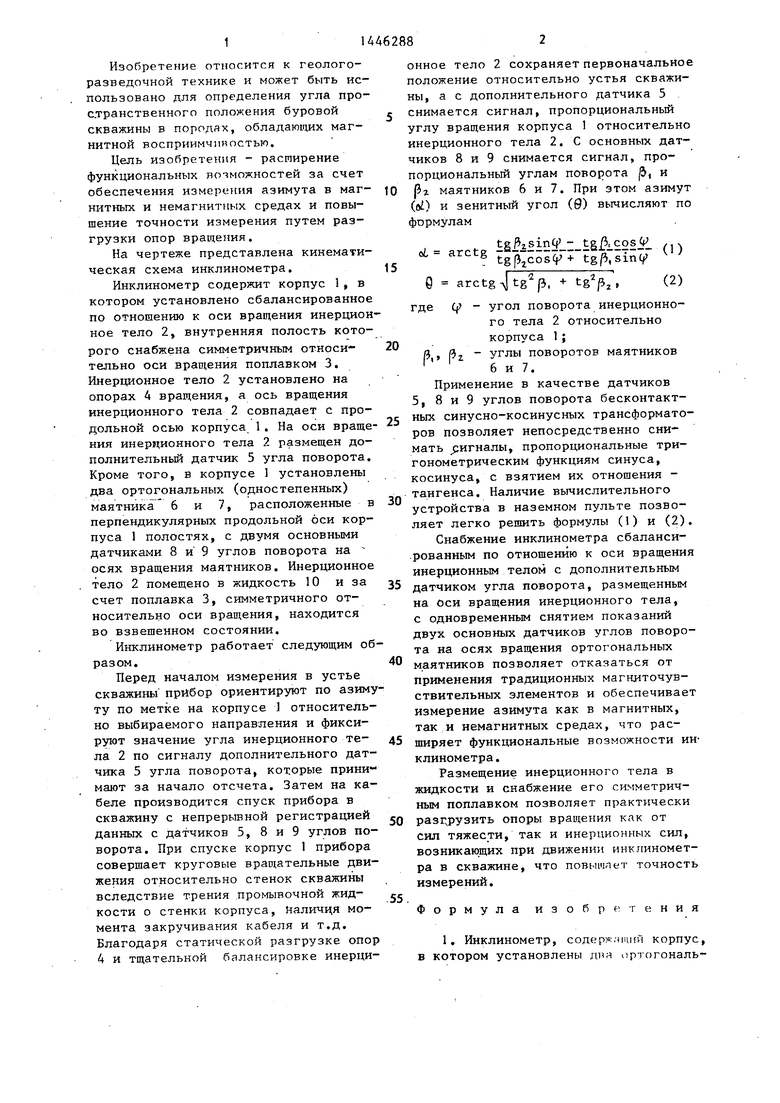
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНКЛИНОМЕТР | 1995 |
|
RU2111454C1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2112876C1 |
| Инклинометр | 1988 |
|
SU1569403A1 |
| Устройство для измерения искривления скважины | 1979 |
|
SU866149A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ АЗИМУТА И УГЛА ВРАЩЕНИЯ СКВАЖИННЫХ ПРИБОРОВ | 1999 |
|
RU2168010C1 |
| Оптоэлектронный инклинометр | 1986 |
|
SU1425310A1 |
| Инклинометр | 1988 |
|
SU1645485A1 |
| Прибор для измерения углов измерения скважины | 1978 |
|
SU746097A1 |
| Инклинометр | 1987 |
|
SU1490264A1 |
| БЛОК ИНКЛИНОМЕТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 2007 |
|
RU2359121C1 |
Изобретение относится к геологоразведочной технике и предназначено ДЛЯ определения пространственного положения скважины в породах, обладающих ма:гнитной восприимчивостью. Цель - расширение функциональных возможностей за счет обеспечения измерения азимута в магнитных и немагнитных средах и повьшение точности изм.ере- ния путем разгрузки опор вращения. В корпусе (К) 1 установлено сбалансированное по отношению к оси вращения инерционное тело (ИТ) 2, внутренняя полость которого снабжена симметрич-. ным относительно оси вращения поплавком 3. При этом ИТ 2 установлено на опорах 4 вращения, а ось вращения ИТ 2 совпадает с продольной осью К 1. Кроме того, в К 1 установлены два ортогональных маятника 6 и 7, на осях вращения которых размещены два основных датчика (Д) 8 и 9 углов поворота. На оси вращения ИТ 2 размещен.дополнительный Д 5 угла поворота, а ИТ 2 помещено в жидкость 10. По величине сигналов с Д 5,8 и 9 определяют азимут и зенитный угол. 1 з.п. ф-лы, 1 ил.$ (Л 4 4ib Oi Ю 00 00
| Способ измерения кривизны и азимута буровых скважин и устройство для его осуществления | 1984 |
|
SU1213181A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Разведочная и промысловая геофизика | |||
| - М.-Л.: Гостоптехиздат, 1953, вып | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Машина для изготовления проволочных гвоздей | 1922 |
|
SU39A1 |
