ют между собой тупой угол. Конус 3 установлен соосно с корпусом 1 под К А, Вершина конуса 3 обращена к К 4, а образующая параллельна образующей конуса внутренней конусной поверхности К 4. Нижняя часть пол уоси 9 расположена соосно в корпусе 1, закреплена в подшипнике 10 и несет на себе узел поворота рамки 11, имеющей датчики 12. Узел поворота выполнен в виде вилки 13 и размешенного в нем подшипника 14 подвеса рамки 11. Нижняя часть полуоси 9 жестко связана с вилкой 13. По направляющей конусной поверхности К 4 перемещается подшипник 5, установленный на верхнем конце маятника М 6. Точка подвеса М 6 смещена относительно продольной оси сим1
Изобретение относится к геофизическим приборам для исследования параметров траекторий скважин.
Целью изобретения является повы- шение точности и надежности ориентирования при малых углах наклона в условиях вибраций.
На фиг. 1 приведено устройство, общий вид; на фиг. 2 - взаимное рас- положение плоскостей направления наклона корпуса прибора и угла наклона корпуса прибора.
Устройство состоит из цилиндрического корпуса 1, заполненного жид- костью 2, соосно размещенного Б корпусе направляющего конуса 3 вершина которого обращена к центру направляющей, выполненной в виде концентрич- но закрепленного в корпусе 1 кольца 4 с конусной внутренней поверхностью причем направляющими конус 3 размещен над кольцом 4, а образующая конуса 3 параллельна образующей конуса внутренней конической поверхности кольца 4. Подшипник 5 установлен на верхнем конце маятника 6 с возможностью перемещения по направляющей конусной поверхности кольца 4. Маятник 6 имеет центрирующий винт 7, а верхний конец маятника с подшипником 5 размещен с зазором между боковой поверхностью н
метрии корпуса 1 и расположена на конце верхней части полуоси 9. Верхний конец М 6 с подшипником 5 размещен с зазором между боковой поверхностью конуса 3 и внутренней конусной поверхностью К 4. При изменении угла наклона изменяет свое положение корпус 1, а М 6 занимает положение,соответствующее углу наклона, и устанавливает подшипник 5 в определенной направлением наклона точке окружности внутренней поверхности К 4. При любых наклонах корпуса 1 ось наклона рамки 11 занимает положение, параллельное плоскости наклона. Величина угла наклона фиксируется датчиком 12. Конус 3 служит для ограничения перемещения. подшипника 5. 2 ил.
правляющего конуса 3 и внутренней конусной поверхностью кольца 4. Точка подвеса маятника 6, которая может быть представлена, например, подшипником 8, смещена относительно продольной оси симметрии корпуса 1 и расположена на конце верхней части коленчатой полуоси 9, нижняя часть которой образует с верхней частью тупой угол и закреплена соосно в корпусе в центральном подшипнике 10, который закреплен в корпусе под кольцом 4,
Нижняя часть коленчатой полуоси 9 несет на себе узел поворота рамки 11 с датчиками 12, например, с датчиком азимута. Узел поворота рамки выполнен в виде вилки 13 и подшипника 14 подвеса рамки 11, размещенного в вилке 13, жестко связанной с нижней частью коленчатой полуоси 9. Сигнал от,.датчиков 12 поступает с контактной пары 15 коллектор - токосъемник по кабелю 1 6.
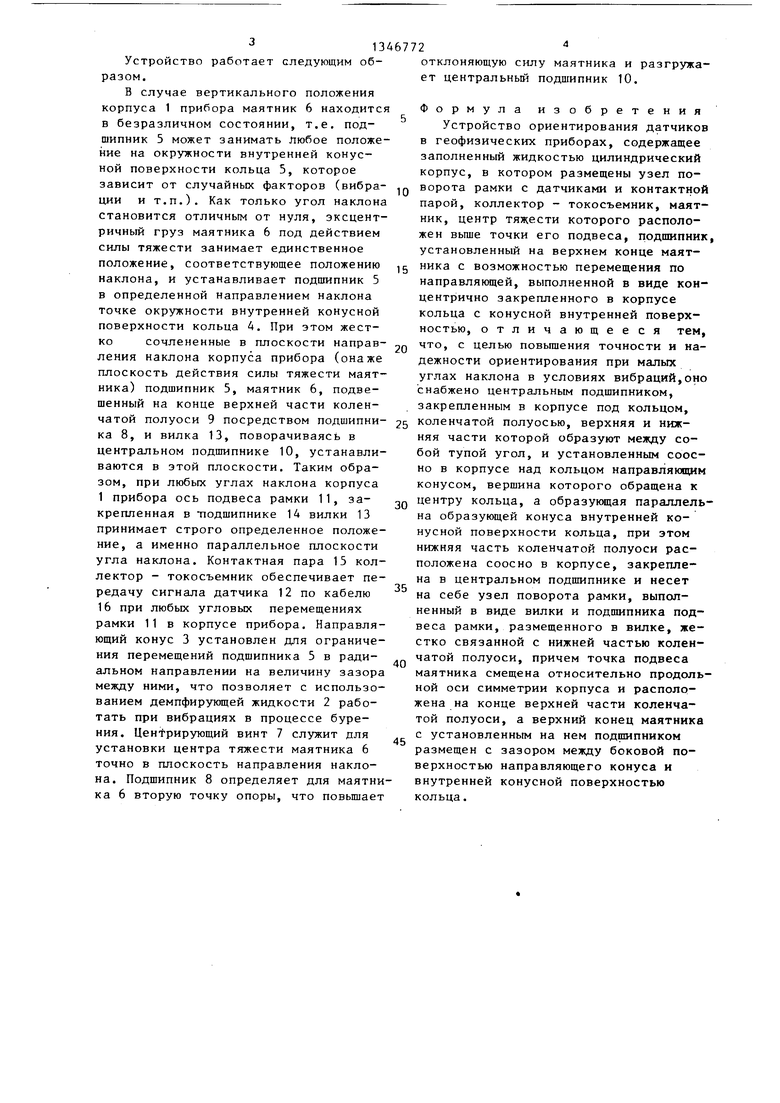
На фиг. 2 обозначены плоскость 17 вертикального положения корпуса прибора, плоскость 18 угла наклона корпуса прибора, плоскость 19 направления наклона, продольная ось 20 симметрии корпуса прибора, имеющего угол 0 наклона.
Устройство работает следующим образом.
В случае вертикального положения корпуса 1 прибора маятник 6 находится в безразличном состоянии, т.е. подшипник 5 может занимать любое положение на окружности внутренней конусной поверхности кольца 5, которое зависит от случайных факторов (вибрации и т.п.). Как только угол наклона становится отличным от нуля, эксцентричный груз маятника 6 под действием силы тяжести занимает единственное положение, соответствующее положению наклона, и устанавливает подшипник 5 в определенной направлением наклона точке окружности внутренней конусной поверхности кольца 4. При этом жестко сочлененные в плоскости направления наклона корпуса прибора (онаже плоскость действия силы тяжести маятника) подшипник 5, маятник 6, подвешенный на конце верхней части коленчатой полуоси 9 посредством подшипника 8, и вилка 13, поворачиваясь в центральном подшипнике 10, устанавливаются в этой плоскости. Таким образом, при любых углах наклона корпуса 1 прибора ось подвеса рамки 11, закрепленная в подшипнике 14 вилки 13 принимает строго определенное положение, а именно параллельное плоскости угла наклона. Контактная пара 15 коллектор - токосъемник обеспечивает передачу сигнала датчика 12 по кабелю 16 при любых угловых перемещениях рамки 11 в корпусе прибора. Направляющий конус 3 установлен для ограничения перемещений подшипника 5 в радиальном направлении на величину зазора между ними, что позволяет с использованием демпфирующей жидкости 2 работать при вибрациях в процессе бурения. Центрирующий винт 7 служит для установки центра тяжести маятника 6 точно в плоскость направления наклона. Подшипник 8 определяет для маятника 6 вторую точку опоры, что повьтаег
отклоняющую силу маятника и разгружает центральный подшипник 10.
Формула изобретения
Устройство ориентирования датчиков в геофизических приборах, содержащее заполненный жидкостью цилиндрический корпус, в котором размещены узел поворота рамки с датчиками и контактной парой, коллектор - токосъемник, маятник, центр тяжести которого расположен Bbmie точки его подвеса, подшипник, установленный на верхнем конце маятника с возможностью перемещения по направляющей, выполненной в виде кон- центрично закрепленного в корпусе кольца с конусной внутренней поверх0
0
5
0
5
ностью.
отличающее ся
тем,
что, с целью повьш1ения точности и надежности ориентирования при малых углах наклона в условиях вибраций,оно снабжено центральным подшипником, закрепленным в корпусе под кольцом, 5 коленчатой полуосью, верхняя и нижняя части которой образуют между собой тупой угол, и установленным соос- но в корпусе над кольцом направляющим конусом, вершина которого обращена к центру кольца, а образующая параллельна образующей конуса внутренней конусной поверхности кольца, при этом нижняя часть коленчатой полуоси расположена соосно в корпусе, закреплена в центральном подшипнике и несет на себе узел поворота рамки, выполненный в виде вилки и подшипника подвеса рамки, размещенного в вилке, жестко связанной с нижней частью коленчатой полуоси, причем точка подвеса маятника смещена относительно продольной оси симметрии корпуса и расположена на конце верхней части коленчатой полуоси, а верхний конец маятника с установленным на нем подшипником размещен с зазором между боковой поверхностью направляющего конуса и внутренней конусной поверхностью кольца.
20
18
У
Редактор Н. Лазаренко
Составитель А. Цветков
Техред М.Ходанич Корректор С. Черни
Заказ 5103/31Тираж 532Подписное
ВНИНГШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
-- - - .. „. „.-,-.
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРАВИТАЦИОННЫЙ ОРИЕНТАТОР ДАТЧИКОВ | 1972 |
|
SU332204A1 |
| Устройство для ориентирования чувствитель-НыХ элЕМЕНТОВ | 1978 |
|
SU851306A2 |
| Устройство для ориентирования датчиков | 1982 |
|
SU1102916A1 |
| Устройство для ориентирования датчиков | 1979 |
|
SU781329A1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1968 |
|
SU222309A1 |
| Инклинометр | 1984 |
|
SU1469108A1 |
| БЛОК ИНКЛИНОМЕТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 2007 |
|
RU2359121C1 |
| Инклинометр | 1983 |
|
SU1134705A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ ДАТЧИКОВ МАГНИТНОГО ПОЛЯ | 1969 |
|
SU234282A1 |
| УСТРОЙСТВО ДЛЯ ИЗУЧЕНИЯ ЗАКОНОВ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2006 |
|
RU2309462C1 |
Изобретение относится к геофизическим исследованиям. Цель изобретения - повышение точности и надежности ориентирования при малых углах наклона в условиях вибраций. Для этого устр-во снабжено центральным подшипником 10, закрепленным в корпусе 1 под кольцом (К) 4 коленчатой полуоси 9, и направляющим конусом 3. Верхняя и нижняя части полуоси 9 образу(Л
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ ГЕОФИЗИЧЕСКИХ ДАТЧИКОВ В СКВАЖИНАХ | 1971 |
|
SU420763A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
