Изобретение относится к промысловой геофизике и может быть использовано в инклинометрах и наклономерах с датчиками ориентации маятникового типа.
Целью изобретения является повышение виброустойчивости устройства путем избыточного давления жидкости в корпусе.
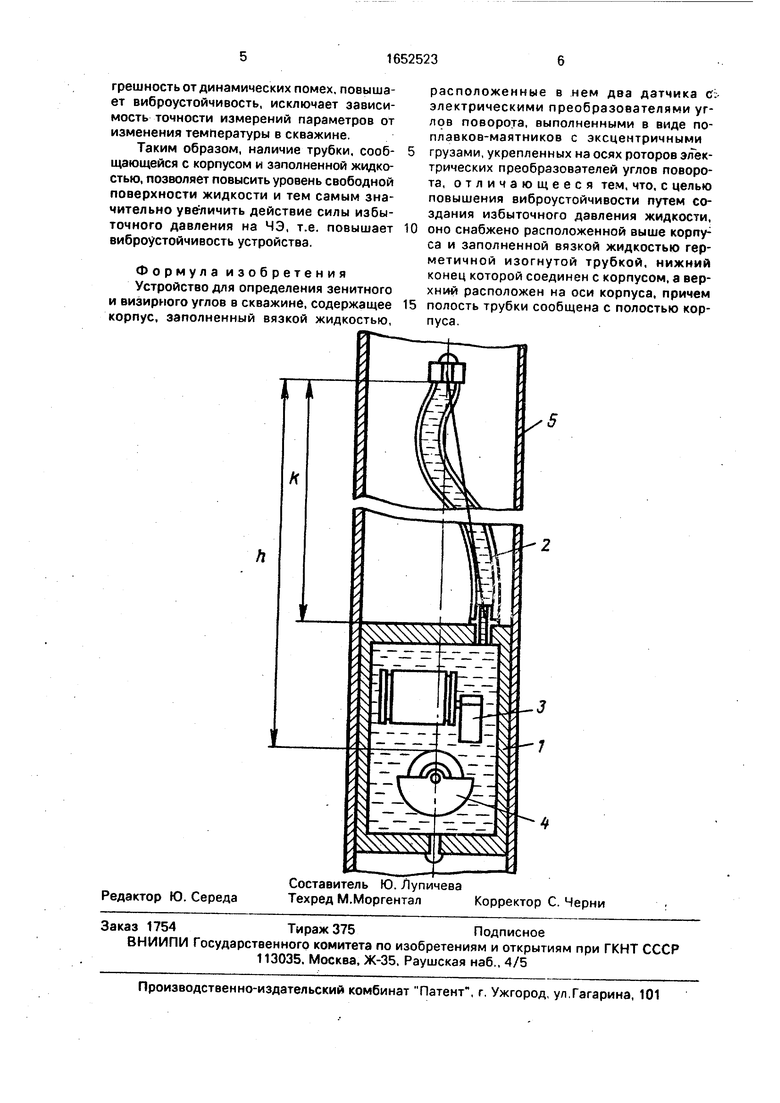
На чертеже схематично изображено предлагаемое устройство для определения зенитного и визирного углов в скважине.
Устройство для определения зенитного и визирного углов в скважине состоит из корпуса 1, заполненного вязкой жидкостью, герметичной изогнутой трубки 2, нижний конец которой соединен с корпусом, а верхний
расположен на оси корпуса. В корпусе 1 расположены два одинаковых чувствительных элемента (43 ) 3 и 4, уравновешенных в жидкости по плавучести и дифференту и закрепленных на роторах электрических преобразователей сигналов. Причем полость корпуса сообщена с полостью трубки. Устройство размещено в охранном кожухе 5 скважинного прибора.
Устройство работает следующим образом.
При отклонении корпуса устройства от вертикали на зенитный угол 0 и повороте его вокруг продольной оси на визирный угол а.4Э 3 и 4. поворачиваясь, занимают
О
ел
N5 СЛ ГО
со
вертикальное положение. При этом ротор одного преобразователя поворачивается относительно статора на некоторый угол fl, а другой ротор - на угол /fc, Co статоров преобразователей снимаются электрические сигналы, пропорциональные углам поворота 0 и р . Углы fl и /3z связаны с искомыми зенитным 0 и визирным р тригонометрическими соотношениями
cos p tg 0; slny tg Э;
(D 15
tg0- Vtg/fl+tg$
Таким образом, могут быть вычислены искомый зенитный и визирный углы. Наличие трубки, сообщающейся с корпусом устройства, обеспечивает в последнем высокую виброустойчивость ЧЭ в процессе работы в условиях вибраций.
Как известно закон распределения давления по глубине выражается формулой
P P0+pgh.(2)
где Ро - давление над свободной поверхно- стью жидкости;
р- плотность жидкости;
g - ускорение силы тяжести:
h - заглубление тела по отношению к свободной поверхности.
Если все члены формулы (2) разделить на величину р g, то она выразится линейной зависимостью
P9+P9+hl
которая показывает, что давлению Р можно поставить в соответствие величине столба жидкости h, создающего в своем основании данное давление. Таким образом, в данном случае формула (1) определяет давление на дно и стенки корпуса, а также на поверхность ЧЭ, вращающегося в жидкости. По теореме Паскаля давление жидкости на тело, заглубленное под свободной поверхно- стью равно
Ри- Ро+ /9gh- Ратм.
где Ратм - атмосферное давление. При нормальных условиях Ро Ратм, следовательно давление на глубине h (избыточное давление) определится как весовое давление жидкости
Ри- pgh.
(3)
0
5
Рассмотрим механизм действия избыточного давления жидкости на погруженное в нее тело. Представим площадь поверхностей, взаимодействующих с жидкостью (поверхность ЧЭ и поверхность полости корпуса), в виде суммы единичных плоских площадей 2i Si. Главный вектор силы давления
i 1
жидкости на любую плоскую площадку Si, как угодно наклоненную к горизонту, равен по величине весу цилиндрического столба жидкости, создающего в своем основании данное давление. Он определяется интегралом
R -/ nPndSi,
(4)
g 5
Q
5
0
5 0
5
где п - нормаль к поверхности SI, направленная внутрь жидкости (в данном случае ri const);
Ри р gh - избыточное (весовое) давление.
Величина силы давления из (4) определится как
R pgh-S,(5)
где S - общая площадь поверхности.
Таким образом, на единицу объема жидкости действует сила, обусловленная пространственными изменениями давления Ри и не зависящая от ориентации площадок Si (т.е. от конфигурации поверхности S). Величина давления Р определяет степень сжатия жидкости в рассматриваемой области (в корпусе устройства), а нормальные напряжения в жидкости сводятся с напряжениям сжатия, действующим на поверхность ЧЭ и зависящим только от величины заглубления последнего относительно свободной поверхности. Вследствие внутренних напряжений, создаваемых в жидкости избыточным давлением, относительное движение слоев жидкости в корпусе устройства не зависит от относительных перемещений самого корпуса под воздействием динамических помех. Следовательно, ЧЭ своей поверхностью взаимодействует со слоями жидкости, находящимися в относительном покое и движение самого ЧЭ ограничено (в данном случае объем жидкости в корпусе можно рассматривать как разновидность твердого тела в аморфном состоянии). Последнее в значительной степени усиливает демпфирование ЧЭ, при этом система жидкость - ЧЭ, в отличие от известных устройств, при прочих равных условиях имеет только две степени свободы, обусловленные лишь движением самого ЧЭ относительно корпуса, что снижает погрешность от динамических помех, повышает виброустойчивость, исключает зависимость точности измерений параметров от изменения температуры в скважине.
Таким образом, наличие трубки, сообщающейся с корпусом и заполненной жидкостью, позволяет повысить уровень свободной поверхности жидкости и тем самым значительно увеличить действие силы избыточного давления на ЧЭ, т.е. повышает виброустойчивость устройства.
Формула изобретения Устройство для определения зенитного и визирного углов в скважине, содержащее корпус, заполненный вязкой жидкостью,
0
расположенные в нем два датчика с. электрическими преобразователями углов поворота, выполненными в виде поплавков-маятников с эксцентричными грузами, укрепленных на осях роторов трических преобразователей углов поворота, отличающееся тем, что, с целью повышения виброустойчивости путем создания избыточного давления жидкости, оно снабжено расположенной выше корпуса и заполненной вязкой жидкостью герметичной изогнутой трубкой, нижний конец которой соединен с корпусом, а верхний расположен на оси корпуса, причем полость трубки сообщена с полостью корпуса.

| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ЗЕНИТНОГО УГЛА | 2004 |
|
RU2254464C1 |
| Виброустойчивый преобразователь зенитного угла | 1986 |
|
SU1430509A1 |
| Виброустойчивый преобразователь зенитного угла | 1988 |
|
SU1537799A1 |
| Преобразователь зенитного и визирного углов | 1985 |
|
SU1298363A1 |
| ВИБРОУСТОЙЧИВЫЕ ГИДРАВЛИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ ЗЕНИТНОГО И ВИЗИРНОГО УГЛОВ | 1998 |
|
RU2178821C2 |
| Преобразователь зенитного угла | 1982 |
|
SU1027379A1 |
| Устройство для определения зенитного и визирного угла в скважине | 1980 |
|
SU933968A1 |
| Датчик зенитного угла | 1982 |
|
SU1020572A1 |
| Датчик зенитного и визирного углов | 1989 |
|
SU1717806A1 |
| Преобразователь зенитного угла | 1981 |
|
SU992734A1 |
Изобретение относится к промысловой геофизике и м.б. использовано в инклинометрах. Цель - повышение виброустойчивости путем создания избыточного давления. Уст-во содержит корпус, заполненный вязкой жидкостью, расположенные в нем два датчика с электрическими преобразователями углов поворота, Они выполнены в виде поплавков-маятников с эксцентричными грузами, укрепленных на осях роторов электрических преобразователей углов поворота. Выше корпуса размещена заполненная вязкой жидкостью герметичная изогнутая трубка. Нижний конец изогнутой трубки соединен с корпусом, а верхний расположен на оси корпуса. Полость изогнутой трубки сообщена с полостью корпуса. Система жидкость - чувствительный элемент имеет только две степени свободы, обусловленные лишь движением самого чувствительного элемента относительно корпуса. Это снижает погрешность от динамических помех, повышает виброустойчивость, исключает зависимость точности измерений параметров от изменения т-ры в скважине. Наличие гибкой трубки позволяет повысить уровень свободной поверхности жидкости и тем самым значительно увеличить действие силы избыточного давления на чувствительный элемент. 1 ил. Ё
| Устройство для контроля параметров траектории скважины | 1983 |
|
SU1155732A2 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для определения зенитного и визирного угла в скважине | 1980 |
|
SU933968A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
