Изобретения относятся к области исследования гидрофизических полей и могут быть использованы при проведении экологических исследований, в океанологии и других областях техники, где требуется вести контроль параметров турбулентных пульсаций скорости в морской среде.
Для решения задачи определения статистических характеристик турбулентных пульсаций скорости в морской среде необходимо иметь высокочувствительный преобразователь скорости в электрический сигнал. Одной из причин, препятствующих определению статистических характеристик турбулентных пульсаций скорости в морской среде, является чувствительность преобразователя скорости к паразитным сигналам, возникающим в результате вибраций преобразователя, установленного на подвижном носителе, например, на буксируемой линии, что не позволяет определять, в частности, усредненное значение квадратичных значений турбулентных пульсаций скорости, которое является важнейшей энергетической характеристикой турбулентности.
В результате проведенных патентно-информационных исследований аналогов предлагаемых изобретений не обнаружено.
Задачей, решаемой изобретениями, является обеспечение возможности определения усредненного значения квадратичных значений турбулентных пульсаций скорости в морской среде с низким уровнем энергии турбулентности в условиях аддитивных вибрационных помех.
Сущность первого изобретения заключается в том, что в способе определения усредненного значения квадратичных значений турбулентных пульсаций скорости в морской среде в условиях аддитивных вибрационных помех одновременно осуществляют преобразование скорости в электрический сигнал с помощью первого преобразователя скорости в электрический сигнал, а также второго и третьего преобразователей скорости в электрический сигнал, расположенных на одной прямой линии с первым преобразователем скорости в электрический сигнал по обе стороны от первого преобразователя скорости в электрический сигнал на равных расстояниях от него, при этом перемещают прямолинейно и равномерно в исследуемой морской среде жестко связанные между собой идентичные первый, второй и третий преобразователи скорости в электрический сигнал, а усредненное значение квадратичных значений турбулентных пульсаций скорости в морской среде определяют по формуле
где  усредненное значение квадратичных значений турбулентных пульсаций скорости в морской среде, (м/с)2;
усредненное значение квадратичных значений турбулентных пульсаций скорости в морской среде, (м/с)2;
U1, U2 и U3 - напряжения на выходах первого, второго и третьего преобразователей скорости в электрический сигнал, соответственно, В; усредненное значение сигнала
усредненное значение сигнала  B2;
B2;
KПР - коэффициент преобразования каждого из преобразователей скорости в электрический сигнал, В/(м/с);
λ1 и λ2 - верхняя и нижняя границы диапазона измеряемых пространственных неоднородностей соответственно, м;
R - расстояние от первого преобразователя скорости в электрический сигнал до второго и третьего преобразователей скорости в электрический сигнал, м;
F(λ1,λ2,R) - коэффициент, зависящий от отношений λ1/λ2 и R/λ2.
Сущность второго изобретения заключается в том, что устройство для определения усредненного значения квадратичных значений турбулентных пульсаций скорости в морской среде в условиях аддитивных вибрационных помех содержит жестко связанные между собой идентичные первый, второй и третий преобразователи скорости в электрический сигнал и блок вычисления функции
где U - сигнал на выходе упомянутого блока вычисления функции, В;
К - масштабный коэффициент;
U1, U2 и U3 - напряжения на первом, втором и третьем входах упомянутого блока вычисления функции соответственно, В.
Устройство содержит также последовательно соединенные полосовой фильтр, квадратор, блок усреднения и масштабный блок. При этом второй и третий преобразователи скорости в электрический сигнал расположены на одной прямой линии с первым преобразователем скорости в электрический сигнал по обе стороны от первого преобразователя скорости в электрический сигнал на равных расстояниях от него, входы упомянутого блока вычисления функции с первого по третий соединены с выходами преобразователей скорости в электрический сигнал с первого по третий соответственно, его выход соединен со входом полосового фильтра, а выход масштабного блока является выходом устройства.
Сущность изобретений поясняется чертежами, на которых изображены:
на фиг. 1 - функциональная схема устройства,
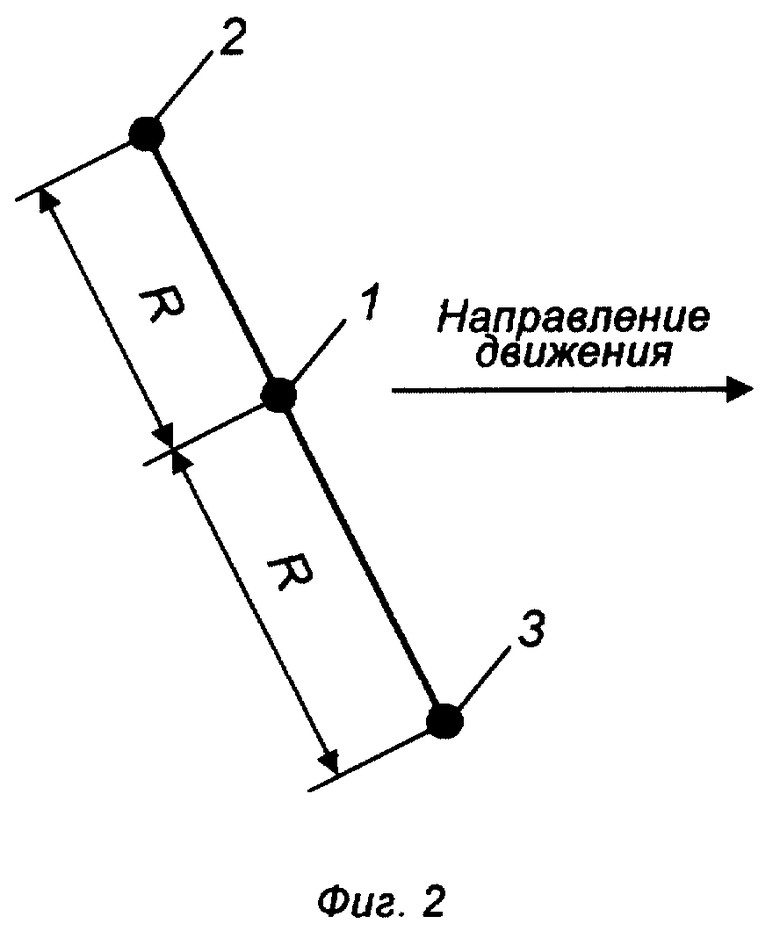
на фиг. 2, 3 - схемы, поясняющие расположение преобразователей скорости в электрический сигнал,
на фиг. 4 - значения F(λ1,λ2,R) для различных отношений λ1/λ2 и R/λ2 для турбулентных пульсаций скорости в направлении движения преобразователей 1-3,
на фиг. 5 - значения F(λ1,λ2,R) для различных отношений λ1/λ2 и R/λ2 для турбулентных пульсаций скорости в направлении, перпендикулярном направлению движения преобразователей 1-3 и перпендикулярном прямой линии, на которой расположены преобразователи 1-3,
на фиг. 6 - значения F(λ1,λ2,R) для различных отношений λ1/λ2 и R/λ2 для турбулентных пульсаций скорости в направлении, перпендикулярном направлению движения преобразователей 1-3 и параллельном прямой линии, на которой расположены преобразователи 1-3.
На фиг. 1 обозначены:
1 - первый преобразователь скорости в электрический сигнал;
2 - второй преобразователь скорости в электрический сигнал;
3 - третий преобразователь скорости в электрический сигнал;
4 - блок вычисления функции (2);
5 - полосовой фильтр;
6 - квадратор;
7 - блок усреднения;
8 - масштабный блок;
На фиг. 2 обозначены:
1 - первый преобразователь скорости в электрический сигнал;
2 - второй преобразователь скорости в электрический сигнал;
3 - третий преобразователь скорости в электрический сигнал;
R - расстояние от первого преобразователя скорости в электрический сигнал до второго и третьего преобразователей скорости в электрический сигнал.
На фиг. 3 обозначены:
1 - первый преобразователь скорости в электрический сигнал;
2 - второй преобразователь скорости в электрический сигнал;
3 - третий преобразователь скорости в электрический сигнал.
В соответствии с фиг. 1 устройство содержит идентичные первый, второй и третий преобразователи 1, 2, 3 скорости в электрический сигнал, выходы которых соединены соответственно с первым, вторым и третьим входами блока 4 вычисления функции (2).
К выходу блока 4 вычисления функции (2) подключены последовательно соединенные полосовой фильтр 5, квадратор 6, блок 7 усреднения и масштабный блок 8.
Преобразователи 1-3 скорости в электрический сигнал могут быть электромагнитного, термоанемометрического или иного другого известного типа.
Блок 4 вычисления функции (2) может быть выполнен, например, на операционных усилителях, реализующих функции суммирования и вычитания, или включать в свой состав многоканальный аналого-цифровой преобразователь и микропроцессорный вычислитель функции (2).
Полосу пропускания полосового фильтра 5 выбирают в зависимости от пространственного масштаба анализируемых турбулентных неоднородностей и скорости движения подвижного носителя. Для решения поставленной задачи используют преимущественно диапазон пространственных неоднородностей от λ2= 0,01 м до λ1= 1,0 м. При фиксированной скорости V движения подвижного носителя этому диапазону соответствует диапазон рабочих частот Δf = fmin÷fmax. В частности, для λ2= 0,01 м, λ1= 1,0 м и V = 5 м/с Δf = 5-500 Гц. Если скорость подвижного носителя может изменяться, то верхнюю и нижнюю частоты диапазона рабочих частот выбирают соответственно из условий fmax= Vmax/λ2 и fmin= Vmin/λ1. Например, диапазону рабочих скоростей носителя V = 2,5-10 м/с и упомянутому выше диапазону от λ2= 0,01 м до λ1= 1,0 м соответствует полоса рабочих частот фильтра 5 Δf = 2,5-1000 Гц. Наилучшим вариантом выполнения фильтра 5 является его выполнение с возможностью ручной или автоматической перестройки полосы пропускания в зависимости от скорости движения носителя.
Время усреднения блока 7 выбирают по меньшей мере в 5-10 раз большим минимального периода колебаний на выходе полосового фильтра 5. Если полосовой фильтр 5 выполнен с перестройкой диапазона рабочих частот, то и блок 7 усреднения целесообразно выполнить с переменным временем усреднения, изменяющимся обратно пропорционально скорости движения подвижного носителя.
Масштабный блок 8 предназначен для масштабирования значения сигнала, полученного на выходе блока 7 усреднения. Его значение выбирают, как правило, равным 1/[K2•F(λ1,λ2,R)], где значения F(λ1,λ2,R) определяют на основании обработки экспериментальных данных. В частности, значения  для различных отношений λ1/λ2 и R/λ2 в случае, когда преобразователи расположены на одной прямой линии, перпендикулярной направлению движения преобразователей 1-3 (фиг. 3), приведены на фиг. 4, 5, 6.
для различных отношений λ1/λ2 и R/λ2 в случае, когда преобразователи расположены на одной прямой линии, перпендикулярной направлению движения преобразователей 1-3 (фиг. 3), приведены на фиг. 4, 5, 6.
Блоки 5-8 могут быть аналоговыми или цифровыми, что не влияет на сущность изобретения. Схемы построения блоков 5-8 хорошо известны.
Преобразователи 2 и 3 скорости в электрический сигнал расположены на одной прямой с преобразователем 1 на расстояниях R от преобразователя 1 (фиг. 2). При этом прямая, на которой расположены преобразователи 1-3, может иметь в пространстве любое положение при условии сохранения работоспособности преобразователей 1-3. В частности, преобразователи 1-3 должны быть правильно ориентированы по отношению к направлению набегающего потока и не должны "затенять" друг друга.
Одним из оптимальных вариантов расположения преобразователей 1-3 по отношению к направлению потока является вариант, при котором преобразователи 1-3 расположены на прямой линии, перпендикулярной направлению набегающего потока (фиг. 3).
Минимальные расстояния R выбирают из условия отсутствия влияния преобразователей 1-3 друг на друга и превышения минимального масштаба измеряемых турбулентных пульсаций скорости. Максимальные расстояния R ограничиваются конструктивными возможностями и условиями соблюдения конструктивной жесткости взаимного расположения преобразователей 1-3. Обычно расстояния R составляют 0,1-1,0 м.
Определение усредненного значения квадратичных значений турбулентных пульсаций скорости в морской среде в условиях аддитивных вибрационных помех предлагаемым способом производят следующим образом.
Идентичные преобразователи 1, 2, 3, конструктивно жестко связанные между собой, перемещают прямолинейно равномерно в исследуемой морской среде (см. фиг. 2 и 3). Осуществляют одновременно преобразование скорости в электрический сигнал с помощью первого преобразователя 1 скорости в электрический сигнал, а также второго и третьего преобразователей 2 и 3 скорости в электрический сигнал. После обработки поступающих от преобразователей 1, 2, 3 сигналов определяют усредненное значение квадратичных значений турбулентных пульсаций скорости в морской среде по формуле (1). Благодаря вычитанию из выходного сигнала первого преобразователя 1 полусуммы сигналов с выходов второго и третьего преобразователей 2 и 3 обеспечивается компенсация аддитивных вибрационных помех. При этом определение истинного усредненного значения квадратичных значений турбулентных пульсаций скорости в морской среде обеспечивается учетом корреляционных связей сигналов с выходов преобразователей 1-3. Учет этих связей достигается применением коэффициента F(λ1,λ2,R).
При необходимости усредненные значения квадратичных значений турбулентных пульсаций скорости в морской среде могут определяться непрерывно в течение заданного периода времени при исследовании заданной акватории. В этом случае полученные значения регистрируются известными средствами, например самописцем и т.п.
Предлагаемое устройство работает следующим образом.
Носитель, например буксируемая линия корабля экологического мониторинга, осуществляет перемещение в исследуемой среде жестко связанных преобразователей 1-3 скорости в электрический сигнал. Из выходного сигнала преобразователя 1 в блоке 4 происходит вычитание сигналов преобразователей 2 и 3 по формуле (2). После обработки в блоке 4 сигнал, свободный от вибрационных помех, фильтруется, возводится в квадрат и усредняется блоками 5, 6, 7. Сигнал, пропорциональный усредненному значению квадратичных значений турбулентных пульсаций скорости в морской среде, поступает на вход масштабного блока 8. В блоке 8 значение выходного сигнала корректируется с учетом значений коэффициентов передачи блоков 5, 6, 7 и коэффициента F(λ1,λ2,R).
Таким образом, предлагаемые изобретения позволяют определять усредненное значение квадратичных значений турбулентных пульсаций скорости в морской среде в условиях аддитивных вибрационных помех.
Представленное описание и чертежи позволяют, используя существующую элементную базу, изготовить предлагаемое устройство в производстве и использовать его и предлагаемый способ в тех областях техники, где требуется определять параметры турбулентности, в том числе вести контроль состояния морской среды с подвижного носителя, что характеризует изобретение как промышленно применимое.




Изобретения относятся к области исследования гидрофизических полей и могут быть использованы при проведении экологических исследований, в океанологии и других областях техники, где требуется вести контроль параметров турбулентных пульсаций скорости в морской среде. Одновременно осуществляют преобразование скорости в электрический сигнал с помощью трех преобразователей скорости в электрический сигнал, которые перемещают прямолинейно равномерно в исследуемой морской среде. Усредненное значение квадратичных значений турбулентных пульсаций скорости в морской среде определяют по расчетной формуле. Устройство содержит первый преобразователь скорости в электрический сигнал, второй и третий преобразователи скорости, идентичные первому преобразователю, расположенные на одной прямой линии с первым преобразователем скорости по обе стороны на равных расстояниях от него. Устройство также содержит блок вычисления функции и последовательно соединенные полосовой фильтр, квадратор, блок усреднения и масштабный блок. Обеспечивается определение усредненного значения квадратичных значений пульсаций скорости с низким уровнем энергии турбулентности. 2 с.п.ф-лы, 6 ил.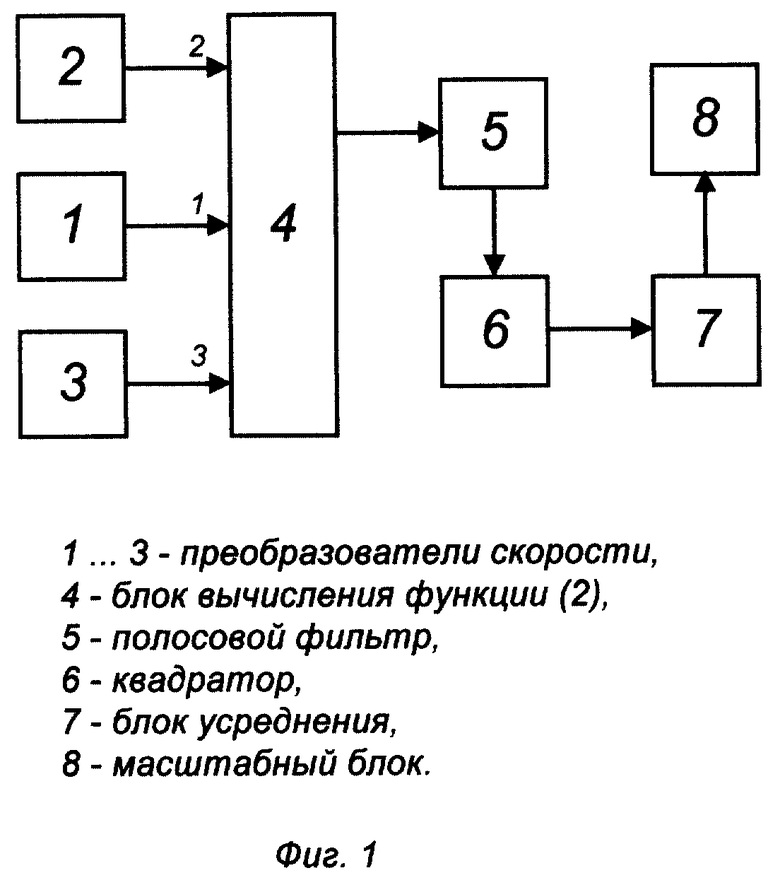
где  усредненное значение квадратичных значений турбулентных пульсаций скорости в морской среде, м/с2;
усредненное значение квадратичных значений турбулентных пульсаций скорости в морской среде, м/с2;
U1, U2 и U3 - напряжения на выходах, первого, второго и третьего преобразователей скорости в электрический сигнал соответственно, В; усредненное значение сигнала
усредненное значение сигнала  В2;
В2;
Кпр - коэффициент преобразования каждого из преобразователей скорости в электрический сигнал, В/(м/с);
λ1 и λ2 - верхняя и нижняя границы диапазона измеряемых пространственных неоднородностей соответственно, м;
R - расстояние от первого преобразователя скорости в электрический сигнал до второго и третьего преобразователей скорости в электрический сигнал, м;
F(λ1,λ2,R) - коэффициент, зависящий от отношений  и R/λ2.
и R/λ2.
2. Устройство для определения усредненного значения квадратичных значений турбулентных пульсаций скорости в морской среде в условиях аддитивных вибрационных помех, характеризующееся тем, что оно содержит жесткосвязанные между собой идентичные первый, второй и третий преобразователи скорости в электрический сигнал, блок вычисления функции
где U - сигнал на выходе упомянутого блока вычисления функции, В;
К - масштабный коэффициент;
U1, U2 и U3 - напряжения на первом, втором и третьем входах упомянутого блока вычисления функции соответственно, В,
а также последовательно соединенные полосовой фильтр, квадратор, блок усреднения и масштабный блок, при этом второй и третий преобразователи скорости в электрический сигнал расположены на одной прямой линии с первым преобразователем скорости в электрический сигнал по обе стороны от первого преобразователя скорости в электрический сигнал на равных расстояниях от него, входы упомянутого блока вычисления функции с первого по третий соединены с выходами преобразователей скорости в электрический сигнал с первого по третий соответственно, его выход соединен со входом полосового фильтра, а выход масштабного блока является выходом устройства.
| SU 7734976, 23.10.1980 | |||
| Датчик скорости | 1980 |
|
SU905864A2 |
| ДВУХРОТОРНЫЙ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2096892C1 |
| ТЕЛЕЖКА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2207275C2 |
| ПРИВОДНОЕ УСТРОЙСТВО РЕГУЛИРУЕМЫХ КЛАПАНОВ ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2010 |
|
RU2500897C2 |

