Изобретение относится к области машиностроения, в частности к электроприводам.
Известны приводы с противоположно вращающимися роторами, которые чаще всего применяются для вращения сдвоенных гребных судовых винтов. К таким приводам относится контрроторный каскад с синхронным генератором (см. Парфенов Э.Е. и Алексеев С.А. "Исследование бесконтактного контрроторного каскада с синхронным генератором". Известия АН СССР. Энергетика и транспорт, N 2, 1978, с. 107).
Недостатками этого привода являются применение привода только для гребного движителя и отсутствие регулирования частоты вращения выходных валов.
Наиболее близким по устройству и по достигаемому результату является электромеханическая система для привода гребных винтов по а. с. N 403003, 1973, БИ N 42.
В этом приводе установленные на корпусе два соосных ротора соединены с двумя гребными винтами, вращающимися в противоположных направлениях.
Недостатками такого привода являются ограниченное его применение и постоянная частота вращения выходных валов. Увеличение крутящего момента достигается только за счет электромагнитных сил, что требует больших габаритов электропривода в сравнении с равноценной механической передачей.
Задачей изобретения является автоматическое регулирование частоты вращения выходного вала в зависимости от величины вращающего момента на этом валу.
Поставленная задача достигается тем, что электропривод с двумя вращающимися в противоположных направлениях роторами установлен на неподвижной оси, закрепленной в корпусе, лапы которого крепятся к станине или к корпусу машины орудия. Со стороны выходного вала привода, который соединен с наружным ротором, установлены на оси подшипники наружного и внутреннего роторов. На выходном валу установлены токосъемные кольца, которые подводят переменный ток к обмотке внешнего ротора. Внутренний ротор имеет короткозамкнутую обмотку. С другой стороны роторы кинематически соединены автоматически регулируемой фрикционной передачей. Внутренний ротор соединен с ведущим катком, который установлен на подшипнике на оси привода. Ведущий каток имеет упругий в тангенциальном направлении обод, который обеспечивает компенсацию геометрического скольжения в пятнах контакта с конусами, расположенными равномерно по окружности обода, и количество их определяется условиями соседства. Конуса спарены основаниями и могут быть выполнены из стали или керамики (карбид бора μo0,6 0,8).
Спаренные конусы установлены в обойме на подшипниках и осях, наклоненных к оси привода под углом, равным половине угла при вершине конуса. Подшипники установлены внутри конусов или на концах осей в стенках обоймы. Наклонные оси спаренных конусов обеспечивают параллельное расположение крайних внутренних образующих одной группы конусов и крайних наружных образующих другой группы конусов к оси привода, что обеспечивает осевое перемещение обоймы с конусами при работе привода и изменение передаточного отношения. Внутренние образующие конусов контактируют с ободом ведущего катка, а наружные с упругим охватывающим ободом, который компенсирует упругой деформацией геометрическое скольжение в пятнах контакта с конусами, передает крутящий момент и создает силы прижатия во взаимодействии с тупоугольными пазами кольца, закрепленного к наружному ротору.
Перемещение обоймы со спаренными конусами осуществляется винтовой парой и пружиной сжатия, которые автоматически работают под действием реактивного момента касательных сил ведущего катка и охватывающего ободка. Винтовая пара имеет винт, выполненный на оси привода в виде двух диаметрально расположенных прямолинейчатых винтовых поверхностей с большим шагом. Гайка представляет собой ступицу обоймы с цилиндрическим отверстием. На концах ступицы на двух осях с каждой стороны в прорезях установлены на каждой оси по два игольчатых подшипника, которые наружными кольцами опираются на винтовые поверхности.
Для обеспечения одновременного прилегания подшипников к винтовым поверхностям необходимо оси на разных концах ступицы установить под углом αo относительно друг друга:
где l расстояние между осями по длине ступицы;
h шаг винтовых поверхностей.
При увеличении вращающего момента на обойме происходит увеличение осевой силы на винтовых поверхностях, что приводит к сжатию пружины и перемещению обоймы со спаренными конусами в сторону увеличения передаточного отношения. При уменьшении вращающего момента пружина перемещает обойму в сторону увеличения частоты вращения выходного вала.
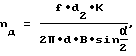
При таком устройстве привода частота вращения выходного вала определяется относительной частотой вращения роторов и выражается формулой:
где ωн- частота вращения выходного вала;
ω - относительная частота вращения роторов;
i передаточное отношение фрикционной передачи
Ведущий каток имеет ступицу с подшипником, установленным на оси привода. На наружной цилиндрической поверхности ступицы имеются мелкие шлицы, на которые установлены тонкие стальные диски.
Каждый диск имеет обод, разрезанный на секции по числу контактирующих конусов. Каждая секция соединена с центральной частью перемычками в виде радиальных консолей равного сопротивления изгибу касательными силами. На первом диске обода разрезы совмещены с канавками глубиной 1 2 мм и шириной 2 4 мм, которые совместно с перемычками обеспечивают компенсацию геометрического скольжения в пятнах контакта с конусами. На остальных дисках число канавок кратно числу конусов и располагается равномерно по окружности.
Пакет дисков сжимается щеками, установленными на ступице.
Пятно контакта в упругофрикционной передаче имеет линейную форму, но отличается от пятна контакта жестких тел качения тем, что оно состоит из отдельных точек контакта каждого диска или кольца с конусами. Это повышает допустимые контактные напряжения.
Геометрическое скольжение в пятнах контакта возникает из-за разности окружных скоростей ведущего катка и конуса. При ведомом конусе скорость его поверхности в пятне контакта меньше окружной скорости катка и полюс качения смещается к основанию конуса.
В упругофрикционной передаче полюс качения в сравнении с передачей с жесткими телами качения имеет теоретическое значение, так как отсутствует геометрическое скольжение. Оно компенсировано упругой деформацией обода. В жесткой передаче с той и другой сторон от полюса качения происходят трения скольжения противоположных направлений. Выход полюса качения за пятно контакта приводит к буксованию. В упругофрикционной передаче, где нет относительного скольжения контактирующих поверхностей, полюс качения в расчетном режиме работы выходит за пятно контакта без буксования.
В предложенной передаче геометрическое скольжение увеличивается от полюса качения по всей длине пятна контакта.
При работе передачи и отсутствии скольжения обод катка отстает от ступицы, что приводит к изгибу перемычек. На расчетных дисках стрела прогиба перемычек пропорциональна геометрическому скольжению на длине дуги между канавками при максимальной касательной силе. При достижении в конце дуги максимальной касательной силы пятно контакта с каждым конусом оказывается над канавкой. Обод диска теряет сцепление с конусами, и секции силами упругости перемычек возвращаются в свободное состояние. В пятне контакта с другим конусом касательная сила возрастает от нуля до максимума, и процесс повторяется.
Геометрическое скольжение и стрела прогиба перемычек выражаются равенством:
где εx относительное геометрическое скольжение в расчетном сечении пятна контакта;
lg длина дуги между канавками;
x расстояние от полюса до расчетного сечения;
d2 диаметр конуса в полюсе качения;
f стрела прогиба перемычек под максимальной расчетной силой;
d1 диаметр диска;
d диаметр вершин перемычек;
K число конусов.
Из технологических требований на всех дисках перемычки и стрелы их прогибов должны быть одинаковы. Для этого, как видно из формулы (3), с увеличением геометрического скольжения надо пропорционально уменьшить длину дуги между канавками. Это достигается увеличением числа канавок на диске. Число канавок должно быть кратно числу конусов. Поэтому диски с расчетной тяговой силой расположены на расстоянии, которое равно расстоянию от полюса качения до первого диска. Это расстояние определяется из формулы (3) при выбранной стреле прогиба перемычек под расчетной нагрузкой:
где X1 расстояние от полюса качения до первого диска и между расчетными дисками.
В ободе катка диски установлены последовательно. Первыми от полюса качения расположены диски с числом канавок 1K, затем диски с числом канавок 2K, 3K и т.д. Количество дисков в ободе с одинаковым числом канавок определяется по формуле:
Ширина обода катка определяется по контактным напряжениям с учетом канавок и точечного контакта дисков, образующих обод.
В предложенной конструкции катка реализуют полную касательную силу только расчетные диски.
Диск с числом канавок 2K, расположенный рядом с диском 1K, имеет длину дуги между канавками в два раза меньше, чем у диска 1K, поэтому реализует половину расчетной касательной силы, а последний диск 2K реализует полную расчетную силу.
Следовательно, каждый диск в среднем реализует 0,75 расчетной касательной силы. Диски с числом канавок 3K реализуют 0,83 расчетной силы, а диски 4K 0,87 и т.д. При расчете силовых характеристик привода это учитывается.
Для обеспечения одинаковой тангенциальной упругости обода по окружности диски на шлицы ступицы устанавливают со смещением прорезей и канавок равномерно по окружности. Секции ободов дисков при работе имеют малое относительное перемещение и прижатие боковыми щеками. Поэтому для исключения фреттинг-коррозии боковые поверхности обмедняются или между дисками устанавливаются антифрикционные прокладки.
Во второй ступени передачи от спаренных конусов к наружному ротору создаются силы прижатия, пропорциональные передаваемому моменту, и эти силы прижатия передаются через спаренные конусы в первую ступень передачи. Кроме этого, охватывающий обод обеспечивает компенсацию скольжений в пятнах контакта обода с конусами упругой деформацией охватывающего обода, который состоит из пакета плоских тонких стальных колец с одним разрезом. Разрезы в пакете расположены равномерно по окружности пакета.
Каждое кольцо имеет на наружной стороне консоли равного сопротивления изгибу с закруглением на конце. Этим закруглением консоль опирается на стенку тупоугольного паза большого кольца, закрепленного на наружном роторе. При передаче вращающего момента возникает радиальная сила прижатия, которая изменяется пропорционально передаваемому моменту и зависит от угла паза, определяемого по формуле:
где γ - угол тупоугольного паза;
dk диаметр вершин консолей обода;
μo- коэффициент трения в пятнах контакта обода с конусами;
d4 внутренний диаметр обода.
На внутренней стороне колец обода выполнены канавки глубиной 1 2 мм, шириной 2 4 мм, которые совместно с консолями обеспечивают компенсацию геометрического скольжения в контакте обода с конусами.
При ведущем конусе, что имеет место во второй ступени, окружная скорость конуса в пятне контакта больше скорости обода, поэтому полюс качения смещается к вершине конуса. При отсутствии скольжения каждое кольцо обода увлекается конусом, опережая кольцо с тупоугольными пазами, которое имеет скорость, определяемую полюсом качения. Эта разность скоростей компенсируется постепенным изгибом консолей до расчетной стрелы прогиба и получения расчетной касательной силы для каждого кольца. В этот момент все пятна контакта этого кольца с конусами попадают в канавки, теряется сцепление кольца с конусами и кольцо силами упругости консолей возвращается в свободное состояние. Затем пятно контакта переходит на соседнюю дугу между канавками и касательная сила растет от нуля до максимума. И так процесс повторяется.
Геометрическое скольжение связано со стрелой прогиба консолей равенством:
где εx- относительное геометрическое скольжение на расстоянии x от полюса качения;
l длина дуги между канавками;
x расстояние от полюса качения до расчетного сечения;
α - угол при вершине конуса;
d4 внутренний диаметр кольца;
d3 диаметр конуса у полюса качения;
K число контактирующих конусов;
fk стрела прогиба консоли;
dk диаметр расположения вершин консолей.
Для упрощения изготовления консолей на кольцах обода (сделать их одинаковыми) при переменном геометрическом скольжении по ширине обода применено уменьшение длин дуг между канавками за счет их кратного увеличения. При расчете охватывающего обода конструкцией консолей выбирается стрела их прогиба. Это позволяет из формулы (7) определить расстояние от полюса качения до первого кольца, равного расстоянию между расчетными кольцами с полной расчетной нагрузкой.
В промежутках между расчетными кольцами с числом канавок 1K и 2K установлены кольца с числом канавок 2K, а между кольцами 2K и 3K установлены кольца с числом канавок 3K и т.д.
Количество колец с одинаковым числом канавок определяется по формуле:
где B толщина кольца.
В связи с переменной величиной геометрического скольжения касательная сила так же, как и у ведущего катка составляет в среднем 0,75 для колец с числом канавок 2K, 0,83 для колец с числом канавок 3K и т.д. от расчетной касательной силы.
Кольца в пакете устанавливаются со смещением канавок так, чтобы обеспечить одинаковую тангенциальную упругость обода по всей окружности. Ширина обода определяется по контактным напряжениям с учетом канавок и точечного контакта каждого кольца. Возможность фреттинг-коррозии колец предупреждается так, как у ведущего катка.
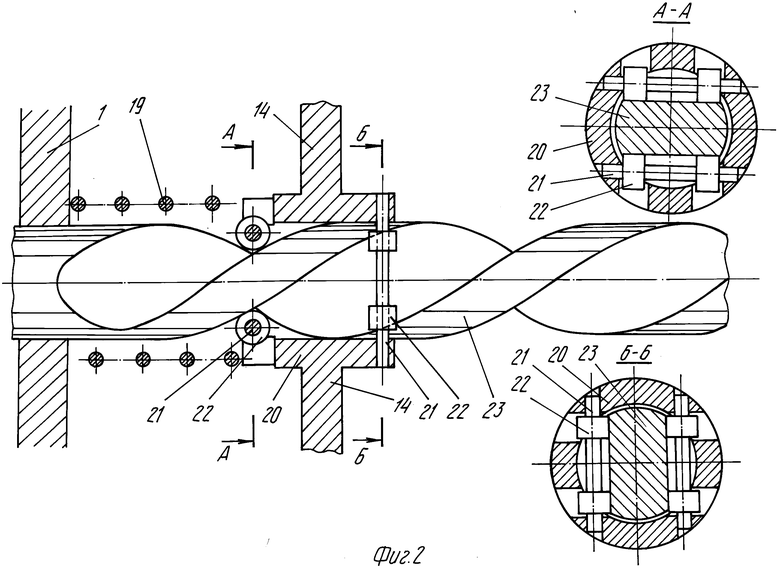
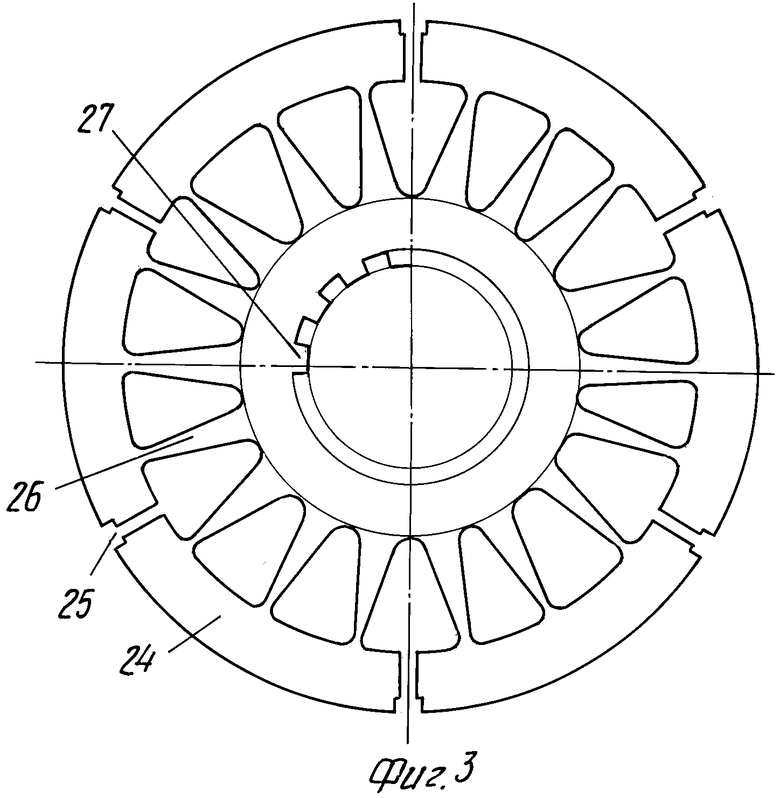
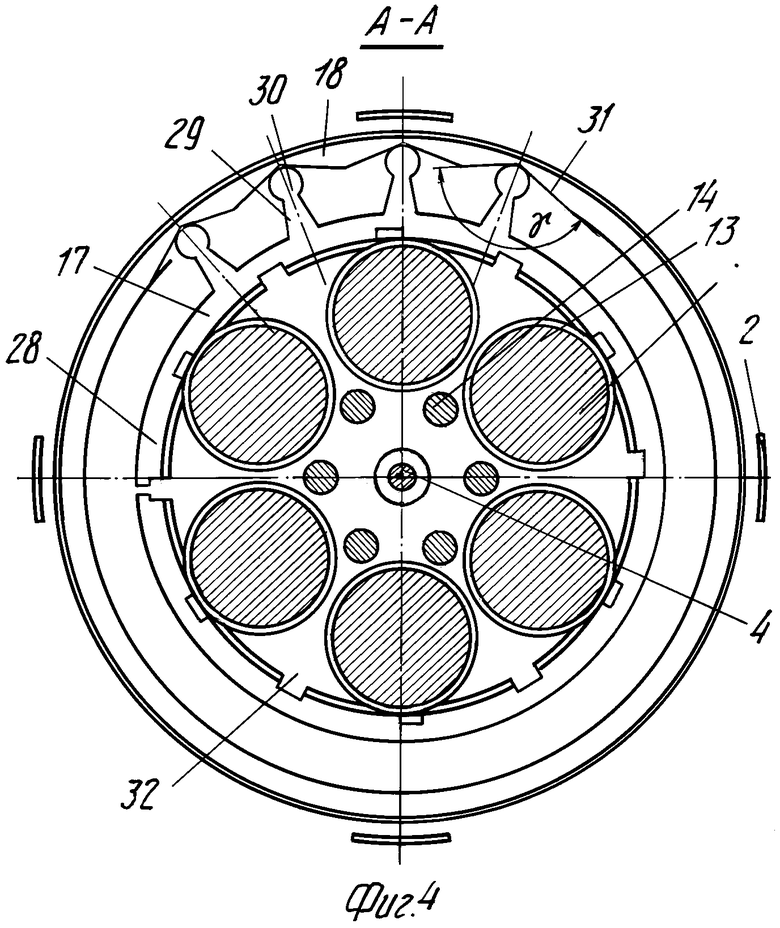
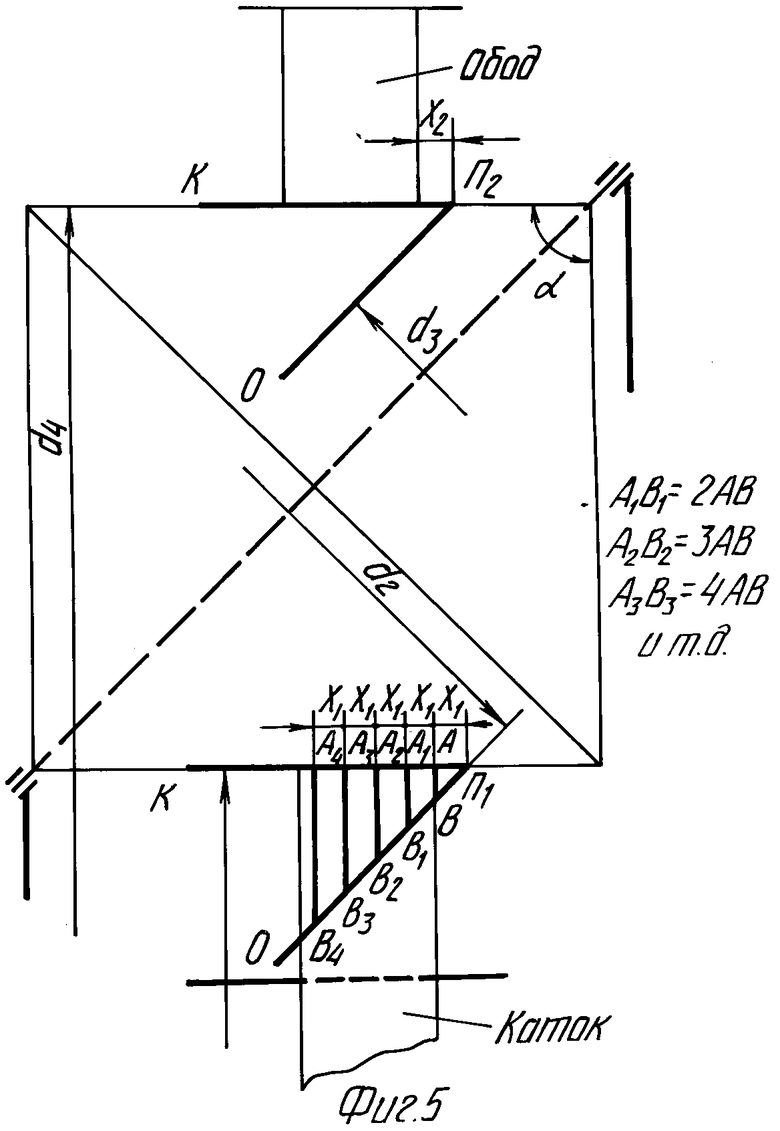
Устройство привода показано на чертежах: на фиг.1 продольный разрез привода; фиг. 2 механизм автоматического регулирования передаточного отношения; на фиг.3 диск ведущего контакта, на фиг.4 сечение А-А по охватывающему ободу; на фиг.5 расчетная схема для определения параметров ободов.
Корпус 1 (фиг. 1) лапами 2 крепится к корпусу 3 машины орудия. В корпусе закреплена ось 4, на которой со стороны выходного вала 5 на подшипнике 6 установлен внутренний ротор, а на подшипнике 7 наружный ротор, соединенный с выходным валом, на котором установлены токосъемные кольца 8, подводящие переменный ток к обмотке наружного ротора 9. Внутренний ротор 10 имеет короткозамкнутую обмотку. С другой стороны внутренний ротор соединен с ведущим катком 11, установленным на подшипнике 12 на оси привода. Ведущий каток контактирует со спаренными конусами 13, которые установлены в обойме 14 на подшипниках 15 и осях 16, наклоненных к оси привода под углом, равным половине угла при вершине конуса. Противоположные конусы контактируют с охватывающим ободом 17, который передает вращающий момент большому кольцу 18, закрепленному на наружном роторе 9.
Механизм автоматического регулирования передаточного отношения состоит из пружины 19, работающей на сжатие, и винтовой пары, состоящей из ступицы 20 обоймы 14 (фиг. 1 и 2). На концах ступицы выполнены пазы, где на осях 21 установлены игольчатые подшипники 22 по четыре с каждой стороны. На оси привода под пружиной и ступицей установлен винт в виде диаметрально расположенных прямолинейных винтовых поверхностей 23 с большим шагом. Для обеспечения контакта игольчатых подшипников к винтовым поверхностям оси их установлены под углом, определяемым по формуле (1). При увеличении вращающего момента на выходном валу увеличивается осевая сила на винтовых поверхностях. Она сжимает пружину и смещает обойму с конусами в сторону увеличения передаточного отношения.
Ведущий каток 11 состоит из пакета стальных дисков (фиг.3), обод которых разрезан на секции 24 по числу контактирующих конусов. С местами разрезов совмещены канавки 25. Секции соединены с центральной частью диска перемычками 26. В центральном отверстии диска выполнены шлицы 27 для установки их на шлицы ступицы. На фиг. 3 изображен первый от полюса качения диск с числом канавок 1K. Другие диски имеют число канавок 2K, 3K, 4K и т.д. Количество дисков с одинаковым числом канавок определяется по формуле (5). Диски установлены со смещением канавок по окружности для получения одинаковой тангенциальной упругости всего обода. При такой конструкции ведущего катка увеличение геометрического скольжения компенсируется уменьшением длины дуг между канавками на дисках. Количество дисков в ободе определяется по допустимым контактным напряжениям.
На нижнем графике фиг. 5 показаны окружные скорости П1О обода катка и П1К конуса. Полюс качения П1 смещен к основанию конуса.
Кратность числа канавок на дисках числу конусов выражается пропорциональностью отрезков на линиях скоростей. Из этого получаем: расстояние от полюса качения до первого диска равно длине пятна контакта, занимаемой дисками с одинаковым числом канавок, т.е. П1А АА1 А1А2 А2А3 и т.д. Эти расстояния определяются по формуле (4).
Охватывающий обод (фиг. 4) состоит из плоских стальных разрезанных в одном месте колец 28, имеющих на наружной стороне консоли 29 равного сопротивления изгибу с закруглениями 30 на конце. Эти консоли взаимодействуют с пазами 3 большого кольца 18. Угол паза определяется по формуле (6). Величина угла определяет силу прижатия обода к конусам, и она изменяется пропорционально передаваемому вращающему моменту. На внутренней стороне колец выполнены канавки 32, которые совместно с консолями обеспечивают компенсацию скольжений упругим изгибом консолей. Зависимость геометрического скольжения и стрелы прогиба дана в формуле (7). Количество канавок на каждом кольце определяется геометрическим скольжением в месте ее установки в ободе, но число канавок обязательно должно быть кратным числу контактирующих конусов.
Во второй ступени передачи ведущим является конус, поэтому его окружная скорость в пятне контакта, изображенная линией П2К (фиг.5), больше окружной скорости охватывающего обода, показанной линией П2О. При этом полюс качения П2 смещен к вершине конуса.
Расстояние от полюса качения до первого кольца, равное длине, занимаемой кольцами с одинаковым числом канавок, определяется по формуле:
Эта формула выводится из равенства (7). Расстояние X2 позволяет по формуле (8) определить число колец с одинаковым числом канавок в пакете обода.
Предложенный привод обеспечивает частоту вращения выходного вала, определяемую по формуле (2).
Диапазон регулирования частоты вращения выходного вала определяется отношением:
Преимущества предлагаемого электропривода.
1. Автоматическое регулирование частоты вращения выходного вала в зависимости от вращения момента на нем.
2. Большой диапазон регулирования частоты вращения.
3. Компенсация скольжений в упругофрикционной передаче позволяет работу без смазки рабочих поверхностей и с высоким КПД.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА | 1995 |
|
RU2115848C1 |
| ЭЛЕКТРОПРИВОД | 1994 |
|
RU2104606C1 |
| ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА | 1999 |
|
RU2188973C2 |
| Каток упругофрикционной передачи | 1991 |
|
SU1816920A1 |
| ВАРИАТОР | 1997 |
|
RU2131545C1 |
| ТРАНСФОРМАТОР МОМЕНТА | 1998 |
|
RU2160400C2 |
| Ведущий каток фрикционного вариатора | 1986 |
|
SU1411541A1 |
| Многопоточный конусный вариатор | 1976 |
|
SU696218A1 |
| Многопоточный конусный вариатор | 1980 |
|
SU887838A2 |
| Многопоточный фрикционный редуктор | 1988 |
|
SU1714257A1 |
Использование: в качестве электропривода в машиностроении. Сущность изобретения: на подшипнике 6 установлен внутренний ротор, а на подшипнике 7 - наружный ротор, соединенный с выходным валом, на котором установлены токосъемные кольца 8, подводящие переменный ток к обмотке наружного ротора 9. Внутренний ротор 10 имеет короткозамкнутую обмотку. С другой стороны внутренний ротор соединен с ведущим катком 11, установленным на подшипнике 12 на оси привода. Ведущий каток контактирует со спаренными конусами 13, которые установлены в обойме 14 на подшипниках 15 и осях 16, наклоненных к оси привода под углом, равным половине угла при вершине конуса. Противоположные конусы контактируют с охватывающим ободом 17, который передает вращающий момент кольцу 18, закрепленному на наружном роторе 9. Механизм автоматического регулирования передаточного отношения состоит из пружины 19, работающей на сжатие, и винтовой пары, состоящей из втулки 20 обоймы 14. На концах втулки выполнены пазы, где на осях 21 установлены игольчатые подшипники 22 по четыре с каждой стороны. 2 з.п. ф-лы, 5 ил.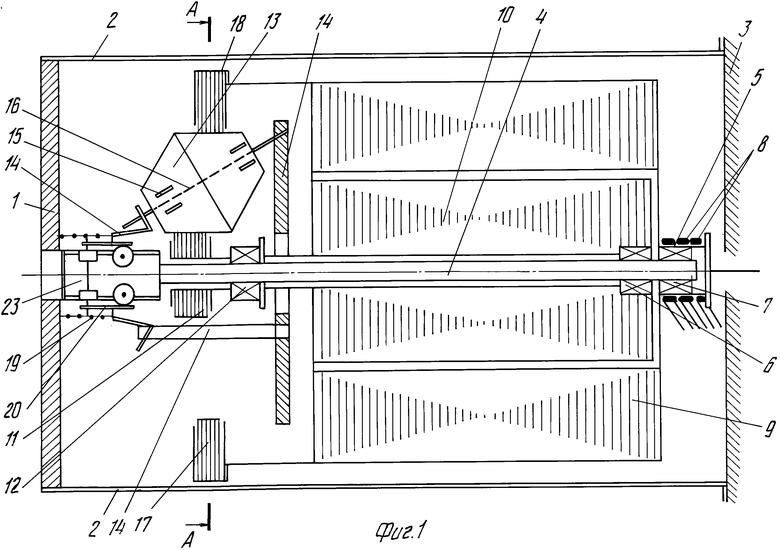
где nд число дисков с одинаковым числом канавок;
f стрела прогиба перемычек под действием расчетной касательной силы;
d2 диаметр на конусах в полюсе качения;
К число контактирующих конусов;
d диаметр расположения вершин перемычек;
В толщина диска;
α _ угол при вершине конуса,
а секции соединены с центральной частью диска радиальными перемычками в форме консолей равного сопротивления изгибу касательными силами, пакет дисков сжат боковыми щеками, закрепленными на концах ступицы.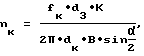
где nк число колец с одинаковым числом канавок;
fк стрела прогиба консолей под расчетной силой;
d3 диаметр на конусах в полюсе качения;
К число контактирующих конусов;
dк диаметр расположения вершин консолей;
В толщина колец;
α - угол при вершине конуса,
пакет колец обода сжат боковыми накладками, прикрепленными к большому кольцу, соединенному с наружным ротором и выходным валом.
| Парфенов Э.Е., Алексеев С.А | |||
| Исследование бесконтактного контрроторного каскада с синхронным генератором | |||
| - Известия АН СССР | |||
| Энергетика и транспорт, 1978, N 2, с.107 | |||
| SU, авторское свидетельство 403003, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
