Изобретение относится к области исследования гидрофизических полей и может быть использовано при проведении экологических исследований, в экспериментальной гидродинамике, океанологии и других областях техники, где требуется вести контроль параметров пульсаций скорости течения среды.
Известны различные устройства, предназначенные для измерения пульсаций скорости течения среды (жидкости или газа), содержащие преобразователи скорости в электрический сигнал (датчики) (см., например, [1]-[4]).
Устройство [1] содержит преобразователь скорости в электрический сигнал (датчик скорости электропроводящей среды), выполненный в виде постоянного магнита, в зазоре которого установлены держатель с электродами, соединенными с электронным усилителем. При измерении пульсаций скорости течения преобразователь скорости в электрический сигнал устанавливают в исследуемом потоке и судят о параметрах потока по параметрам электрического сигнала на выходе электронного усилителя.
Недостатком известного устройства [1] является недостаточная точность определения параметров пульсаций скорости течения из-за высокой чувствительности преобразователя скорости в электрический сигнал к паразитным сигналам, возникающим в результате вибраций и неравномерного движения носителя, установленного, например, на буксируемой линии.
Устройство [2] содержит три электрода, один из которых расположен между двумя другими, постоянный магнит, выполненный в форме тела вращения. Три электрода и участки магнитной системы, включающей постоянный магнит, образуют три преобразователя скорости в электрический сигнал. Преобразователи скорости подключены к электронной схеме, включающей два дифференциальных усилителя и сумматор.
Недостатком устройства [2] является низкая точность измерения. Указанный недостаток обусловлен тем, что для компенсации влияния вибраций и неравномерного движения носителя используются те же электроды, что и для формирования полезного сигнала. В результате наряду с компенсацией сигналов помех компенсируются и полезные сигналы.
Устройство [3] содержит первый преобразователь скорости в электрический сигнал, второй и третий преобразователи скорости в электрический сигнал, идентичные первому преобразователю скорости в электрический сигнал, расположенные на одной прямой линии с первым преобразователем скорости в электрический сигнал по обе стороны от него, а также вычислительный блок, входы которого с первого по третий соединены с выходами преобразователей скорости в электрический сигнал с первого по третий, соответственно, а выход является выходом устройства. После обработки в вычислительном блоке сигналов, поступающих с преобразователей скорости, в электрический сигнал, на выходе устройства формируется сигнал, свободный от вибрационных помех.
Недостатком устройства [3] является большой линейный размер устройства. Недостаток обусловлен тем, что для обеспечения компенсации вибрационных помех второй и третий преобразователи пульсаций скорости находятся на одной прямой линии по разные стороны от первого преобразователя скорости в электрический сигнал на расстоянии, исключающем пространственную фильтрацию пульсаций скорости течения.
Устройство [4] , являющееся по технической сущности наиболее близким к предлагаемому, содержит преобразователь скорости в электрический сигнал, выполненный в виде постоянного магнита, в зазоре которого установлены держатель с электродами, соединенными с электронным усилителем. Для компенсации паразитных сигналов, возникающих в результате неравномерного движения преобразователя в исследуемой жидкой среде, устройство дополнительно содержит последовательно соединенные акселерометр, продольная ось которого параллельна продольной оси электромагнитного преобразователя скорости в электрический сигнал, усилитель, интегратор и сумматор, второй вход которого подключен к выходу усилителя, соединенного с электромагнитным преобразователем скорости в электрический сигнал.
Введение акселерометра, усилителя, интегратора и сумматора позволяет несколько снизить влияние на результаты измерений помех, обусловленных неравномерным движением носителя. Однако эффективность снижения влияния помех в устройстве [4] невысока. Кроме этого устройство [4] не позволяет измерять ортогональные составляющие пульсаций скорости течения в условиях вибрационных помех.
Задачей изобретения является повышение точности измерения ортогональных составляющих пульсаций скорости течения в условиях вибрационных помех.
Для решения поставленной задачи в устройстве для измерения пульсаций скорости течения, содержащем преобразователь скорости в электрический сигнал, последовательно соединенные первый акселерометр, продольная ось которого параллельна продольной оси преобразователя скорости в электрический сигнал, и первый усилитель, а также первый интегратор, преобразователь скорости в электрический сигнал выполнен трехкомпонентным, в устройство введены второй - шестой акселерометры, идентичные первому акселерометру, жестко связанные с ним и с преобразователем скорости в электрический сигнал и расположенные вместе с первым акселерометром в вершинах октаэдра, диагонали которого взаимно перпендикулярны и пересекаются в одной точке, второй - шестой усилители, идентичные первому усилителю, девять идентичных полосовых фильтров, второй - шестой интеграторы, идентичные первому интегратору, три идентичных блока вычитания, а также блок вычисления функций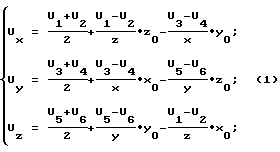
где U1, U2, U3, U4, U5, U6 - напряжения на первом, втором, третьем, четвертом, пятом и шестом входах упомянутого блока вычисления функций соответственно, В;
Ux, Uy, Uz - напряжения на первом, втором и третьем выходах упомянутого блока вычисления функций соответственно, В;
x - расстояние между продольными осями третьего и четвертого акселерометров, м;
y - расстояние между продольными осями пятого и шестого акселерометров, м;
z - расстояния между продольными осями первого и второго акселерометров, м;
x0, y0, z0 - координаты чувствительной зоны преобразователя скорости в электрический сигнал в ортогональной системе координат, образованной соответственно продольной, поперечной и вертикальной диагоналями октаэдра, м;
при этом продольная ось второго акселерометра параллельна продольной оси преобразователя скорости в электрический сигнал, которая параллельна расположенной горизонтально продольной диагонали октаэдра, на которой расположены третий и четвертый акселерометры, продольные оси которых параллельны расположенной горизонтально поперечной диагонали октаэдра, на которой расположены пятый и шестой акселерометры, продольные оси которых параллельны вертикальной диагонали октаэдра, на которой расположены первый и второй акселерометры, входы усилителей со второго по шестой соединены с выходами акселерометров со второго по шестой, соответственно, входы полосовых фильтров с первого по шестой соединены с выходами усилителей с первого по шестой, соответственно, выходы полосовых фильтров с первого по шестой соединены со входами интеграторов с первого по шестой, соответственно, выходы которых соединены со входами упомянутого блока вычисления функций с первого по шестой, соответственно, выходы продольной, поперечной и вертикальной составляющих скорости преобразователя скорости в электрический сигнал соединены со входами полосовых фильтров с седьмого по девятый, соответственно, выходы которых соединены с первыми входами соответственно первого, второго и третьего блоков вычитания, вторые входы которых соединены соответственно с первым, вторым и третьим выходами упомянутого блока вычисления функций, а выходы первого, второго и третьего блоков вычитания являются выходами соответственно продольной, поперечной и вертикальной составляющих пульсаций скорости течения.
Сущность изобретения поясняется чертежами, на которых изображены:
на фиг. 1 - схема, поясняющая взаимное расположение в пространстве преобразователя скорости в электрический сигнал и акселерометров,
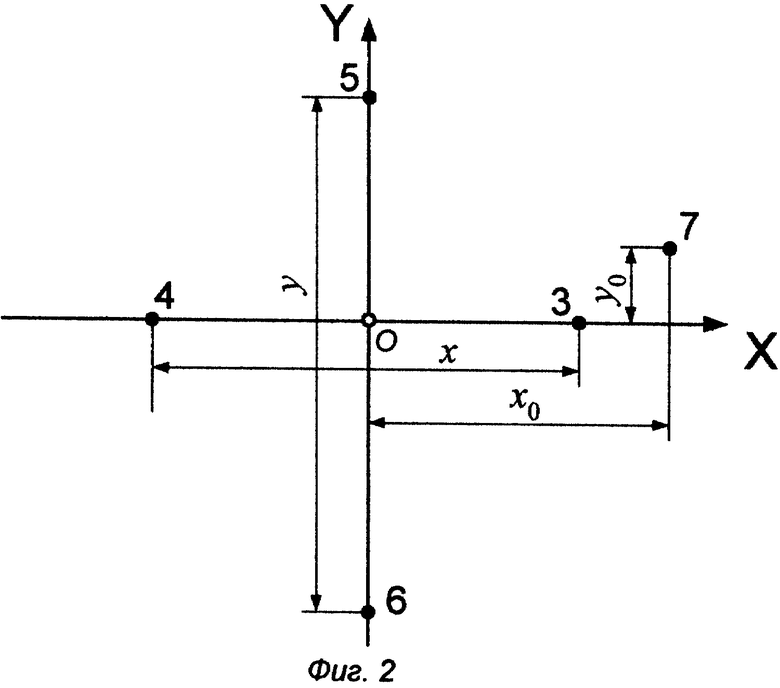
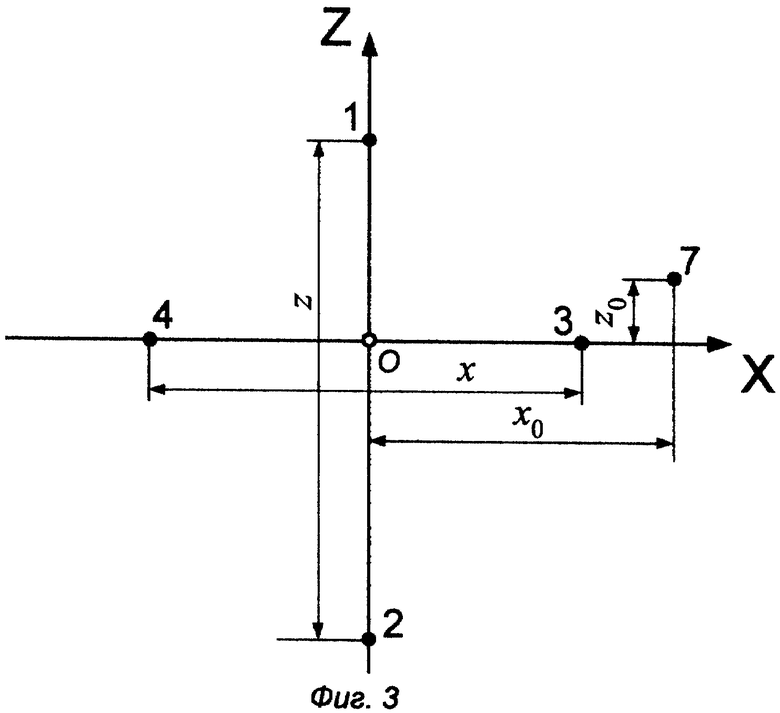
на фиг.2, 3 - проекции координат акселерометров и трехкомпонентного преобразователя скорости в электрический сигнал в, ортогональной системе координат, образованной соответственно продольной, поперечной и вертикальной диагоналями октаэдра,
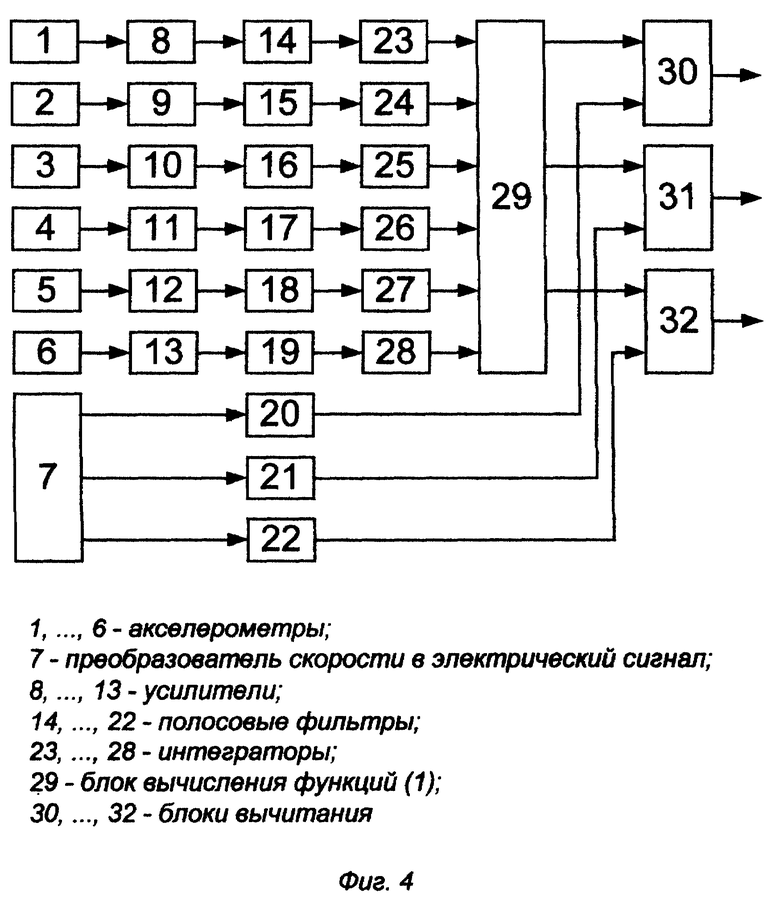
на фиг.4 - функциональная схема устройства.
На чертежах обозначены:
1,..., 6 - акселерометры;
7 - преобразователь скорости в электрический сигнал;
8,..., 13 - усилители;
14,..., 22 - полосовые фильтры;
23,..., 28 - интеграторы;
29 - блок вычисления функций (1);
30,..., 32 - блоки вычитания;
выражения в скобках на фиг.1 - координаты акселерометров 1-6 и преобразователя 7 в системе координат OXYZ, образованной продольной, поперечной и вертикальной диагоналями октаэдра.
В соответствии с фиг.1 устройство содержит трехкомпонентный преобразователь 7 скорости в электрический сигнал, шесть идентичных акселерометров 1-6, расположенных в вершинах октаэдра, жестко связанных между собой и с преобразователем скорости 7 в электрический сигнал.
Продольные оси первого и второго акселерометров 1 и 2 параллельны продольной оси преобразователя 7 скорости в электрический сигнал, которая параллельна расположенной горизонтально продольной диагонали октаэдра, которая образует ось Х ортогональной системы координат. На продольной диагонали октаэдра преимущественно по обе стороны от его центра расположены третий и четвертый акселерометры 3 и 4, продольные оси которых параллельны расположенной горизонтально поперечной диагонали октаэдра, которая образует ось Y ортогональной системы координат. На вертикальной оси октаэдра, которая образует ось Z ортогональной системы координат, преимущественно выше и ниже центра октаэдра расположены соответственно первый и второй акселерометры 1 и 2. На поперечной диагонали октаэдра преимущественно по обе стороны от его центра расположены пятый и шестой акселерометры 5 и 6, продольные оси которых параллельны вертикальной диагонали октаэдра.
Взаимно перпендикулярные диагонали октаэдра пересекаются в одной точке и образуют ортогональную систему координат OXYZ.
В этой системе координат акселерометры 1-6 и преобразователь 7 имеют следующие координаты:
1 (0, 0, z1),
2 (0, 0, z2),
3 (x3, 0, 0),
4 (x4, 0, 0),
5 (0, у5, 0),
6 (0, у6, 0),
7 (x0, у0, Z0).
Согласно фиг. 2, 3 расстояния x, у и z между продольными осями акселерометров с учетом их координат можно определить по формулам:
х=x3-x4,
У=У5-У6,
z=z1-z2.
Расположение акселерометров 1-6 в вершинах октаэдра, расстояния между ними и расстояние от преобразователя 7 скорости в электрический сигнал до центра октаэдра определяются по нахождению центров чувствительных зон.
Расстояния x, у и z между продольными осями акселерометров выбирают в основном из условия отсутствия влияния акселерометров 1-6 друг на друга и на преобразователь 7. Обычно расстояния x, у и z между продольными осями акселерометров составляют (5-50) см.
Преобразователь 7 скорости в электрический сигнал может быть электромагнитного, термоанемометрического или иного другого известного типа.
Предпочтительным вариантом расположения преобразователя 7 и акселерометров 1-6 является такое их расположение, при котором продольная ось преобразователя 7 совпадает с продольной диагональю октаэдра (осью Х системы координат), а акселерометры 1-6 расположены на одинаковом расстоянии от центра октаэдра (от начала координат). В этом случае конструкция устройства получается наиболее компактной, конструктивно симметричной, а выражение (1) упрощается, т.к. У0=Z0=0, а значения x, у, z равны между собой, т.е. x=у=z, что приводит к упрощению блока 29.
Устройство содержит также (см. фиг.4) шесть идентичных усилителей 8-13, девять идентичных полосовых фильтров 14-22, шесть идентичных интеграторов 23-28, блок 29 вычисления функций (1) и три идентичных блока 30-32 вычитания.
Входы усилителей 8-13 соединены с выходами акселерометров 1- 6, соответственно. Входы полосовых фильтров 14-19 соединены с выходами усилителей 8-13, соответственно. Выходы полосовых фильтров 14-19 соединены со входами интеграторов 23-28, соответственно, выходы которых соединены со входами блока 29 вычисления функций (1) с первого по шестой, соответственно. Выходы продольной, поперечной и вертикальной составляющей скорости преобразователя 7 скорости в электрический сигнал соединены со входами полосовых фильтров 20-22, соответственно, выходы которых соединены с первыми входами соответственно первого, второго и третьего блоков 30-32 вычитания, вторые входы которых соединены соответственно с первым, вторым и третьим выходами блока вычисления 29 функций (1). Выходы первого, второго и третьего блоков 30-32 вычитания являются выходами устройства: соответственно выходом продольной, выходом поперечной и выходом, вертикальной составляющей пульсаций скорости течения.
Идентичные усилители 8-13 должны иметь диапазон рабочих часто, достаточный для неискаженного пропускания всего диапазона частот измеряемых пульсаций скорости. Коэффициент усиления усилителей 8-13 выбирают таким образом, чтобы при отсутствии пульсаций скорости течения и наличии вибраций носителя сигналы на выходах блоков 30-32 вычитания были равны нулю (на практике - уровню шума).
Полосу пропускания идентичных полосовых фильтров 14-22 выбирают в зависимости от пространственного масштаба анализируемых пульсаций скорости течения и скорости движения подвижного носителя. Для решения поставленной задачи используют преимущественно диапазон пространственных неоднородностей λ =(0,01-1,0) м. При фиксированной скорости V движения подвижного носителя этому диапазону соответствует диапазон рабочих частот Δf =fmin÷fmax. В частности, для λ =(0,01-1,0) м и V= 5 м/с Δf =(5-500) Гц. Если скорость подвижного носителя может изменяться, то верхнюю и нижнюю частоты диапазона рабочих частот выбирают, соответственно, из условий fmax = Vmax/λmin и fmin = Vmin/λmax. Например, диапазону рабочих скоростей носителя V= (2,5-10) м/с и упомянутому выше диапазону λ =(0,01-1,0) м соответствует полоса рабочих частот фильтров 14-22 Δf =(2,5-1000) Гц.
Наилучшим вариантом выполнения фильтров 14-22 является их выполнение с возможностью ручной или автоматической перестройки полосы пропускания в зависимости от скорости движения носителя.
Время интегрирования интеграторов 23-28 выбирают, по меньшей мере, в 5-10 раз большим максимального периода колебаний на выходе полосовых фильтров 14-22. Если полосовые фильтры 14-22 выполнены с перестройкой диапазона рабочих частот, то и интеграторы 23-28 усреднения целесообразно выполнить с переменным временем интегрирования, изменяющимся обратно пропорционально скорости движения подвижного носителя.
Блок 29 вычисления функций (1) может быть выполнен, например, на операционных усилителях, реализующих функции весового суммирования и вычитания, или включать в свой состав многоканальный аналого-цифровой преобразователь и микропроцессорный вычислитель функции (1).
В преобразователе 7, например, электромагнитного типа, наряду с чувствительными элементами имеются, как правило, подключенные к ним усилители. Трехкомпонентный преобразователь 7 может выполнен, например, по авторскому свидетельству [5].
Предлагаемое устройство работает следующим образом.
Носитель, например, буксируемая линия корабля экологического мониторинга, осуществляет перемещение жестко связанных между собой преобразователя 7 скорости в электрический сигнал и акселерометров 1-6 в исследуемой среде. При этом на выходах ортогональных составляющих преобразователя 7 формируются сигналы ортогональных составляющих скорости с помехами, обусловленными вибрацией преобразователя 7 относительно исследуемой среды, которые после фильтрации фильтрами 20-22 поступают на входы блоков 30-32 вычитания. Одновременно на выходах акселерометров 1-6 формируются сигналы, пропорциональные соответствующим ортогональным составляющим ускорений. После усиления усилителями 8-13, фильтрации полосовыми фильтрами 14-19 и интеграторами 23-28 на входах блока 29 формируются сигналы, пропорциональные вибрационным составляющим скорости в сигналах на выходах преобразователя 7. После преобразования по формулам (1) сигналов на выходах интеграторов 23-28 блоком 29 и вычитания сигналов блоками 30-32 вырабатываются неискаженные сигналы, свободные от вибрационных помех, которые поступают для последующей обработки и определения параметров пульсаций скорости течения.
Таким образом, использование предлагаемого изобретения позволяет повысить точность измерения ортогональных составляющих пульсаций скорости течения в условиях вибрационных помех.
Представленное описание и чертежи позволяют, используя существующую элементную базу изготовить предлагаемое устройство в производстве и использовать его в тех областях техники, где требуется определять параметры пульсаций скорости течения, в том числе вести контроль состояния морской среды с подвижного носителя, что характеризует изобретение как промышленно применимое.
СПИСОК ЛИТЕРАТУРЫ
1. Авт. св. СССР 356564, МПК G 01 Р 5/08, 1972 г.
2. Авт. св. СССР 773496, МПК G 01 Р 5/08, 1980 г.
3. Патент России 2164691, МПК G 01 Р 5/08, 2001 г.
4. Авт. св. СССР 685984, МПК G 01 Р 5/08, 1979 г. (прототип).
5. Авт. св. СССР 1239604, МПК G 01 Р 5/08, 1986 г.
Устройство предназначено для использования в области исследования гидрофизических полей при проведении экологических исследований, в экспериментальной гидродинамике, океанологии и других областях техники. Технический результат - повышение точности измерения ортогональных составляющих пульсаций скорости течения в условиях вибрационных помех. Устройство содержит трехкомпонентный преобразователь скорости в электрический сигнал, расположенные в вершинах октаэдра шесть акселерометров, а также шесть идентичных усилителей, шесть идентичных интеграторов, девять идентичных полосовых фильтров, три идентичных блока вычитания и вычислительный блок, объединенные между собой соответствующими связями. 4 ил.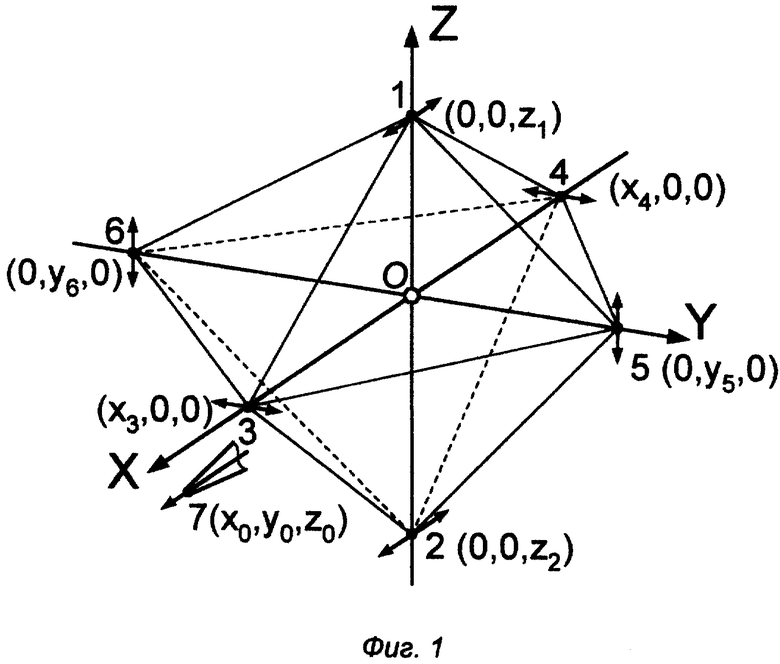
Устройство для измерения пульсаций скорости течения, содержащее преобразователь скорости в электрический сигнал, последовательно соединенные первый акселерометр, продольная ось которого параллельна продольной оси преобразователя скорости в электрический сигнал, и первый усилитель, а также первый интегратор, отличающееся тем, что преобразователь скорости в электрический сигнал выполнен трехкомпонентным, в устройство ведены второй - шестой акселерометры, идентичные первому акселерометру, жестко связанные с ним и с преобразователем скорости в электрический сигнала и расположенные вместе с первым аскелерометром в вершинах октаэдра, диагонали которого взаимно перпендикулярны и пересекаются в одной точке, второй - шестой усилители, идентичные первому усилителю, девять идентичных полосовых фильтров, второй - шестой интеграторы, идентичные первому интегратору, три идентичных блока вычитания, а также блок вычисления функций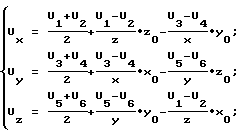
где U1-U6 - напряжения на первом, втором - шестом входах упомянутого блока вычисления функций, соответственно, В;
Uх, Uу, Uz - напряжения на первом, втором и третьем выходах упомянутого блока вычисления функций соответственно, В;
х - расстояние между продольными осями третьего и четвертого акселерометров, м;
у - расстояние между продольными осями пятого и шестого акселерометров, м;
z - расстояние между продольными осями первого и второго акселерометров, м;
х0, у0, z0 - координаты чувствительной зоны преобразователя скорости в электрический сигнал в ортогональной системе координат, образованной соответственно продольной, поперечной и вертикальной диагоналями октаэдра, м,
при этом продольная ось второго акселерометра параллельна продольной оси преобразователя скорости в электрический сигнал, которая параллельна расположенной горизонтально продольной диагонали октаэдра, на которой расположены третий и четвертый акселерометры, продольные оси которых параллельны расположенной горизонтально поперечной диагонали октаэдра, на которой расположены пятый и шестой акселерометры, продольные оси которых параллельны вертикальной диагонали октаэдра, на которой расположены первый и второй акселерометры, входы усилителей со второго по шестой соединены с выходами акселерометров со второго по шестой соответственно, входы полосовых фильтров с первого по шестой соединены с выходами усилителей с первого по шестой соответственно, выходы полосовых фильтров с первого по шестой соединены со входами интеграторов с первого по шестой соответственно, выходы которых соединены со входами упомянутого блока вычисления функций с первого по шестой соответственно, выходы продольной, поперечной и вертикальной составляющих скорости преобразователя скорости в электрический сигнал соединены со входами полосовых фильтров с седьмого по девятый соответственно, выходы которых соединены с первыми входами соответственно первого, второго и третьего блоков вычитания, вторые входы которых соединены соответственно с первым, вторым и третьим выходами упомянутого блока вычисления функций, а выходы первого, второго и третьего блоков вычитания являются выходами соответственно продольной, поперечной и вертикальной составляющих пульсаций скорости течения.
| Датчик скорости потока электропроводной среды | 1978 |
|
SU685984A2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТУРБУЛЕНТНЫХ ПУЛЬСАЦИЙ СКОРОСТИ | 2000 |
|
RU2174687C1 |
| Электромагнитный измеритель гидродинамических характеристик потока жидкости | 1980 |
|
SU898328A1 |
| Анализатор вибраций | 1980 |
|
SU1257411A1 |
| DE 3707138 А1, 04.08.1988 | |||
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 1995 |
|
RU2100779C1 |

