Изобретение относится к устройствам дозирования по весу и может быть использовано для многокомпонентного микродозирования в фармацевтической промышленности и в сельском хозяйстве для производства кормов.
Известно устройство для дозирования штучных продуктов по авторскому свидетельству N 1500851, кл. G 01 G 13/00, содержащее раму, на которой установлены бункеры, механизмы подачи с приводами, блок управления, датчики веса, консольно закрепленные на раме, на каждом из которых консольно закреплен лоток с заслонкой для разгрузки.
Недостатком является непригодность этого устройства для микродозирования мелкодисперсных порошков из-за конструкции заслонки для разгрузки лотка. В результате чего порошок уже при загрузке начинает высыпаться из лотка, что существенно снижает точность его дозирования.
Известна также система весового микродозирования фирмы ENGINEERED SYSTEMS & EQUIPMENT, INC. США, принятая за прототип и содержащая раму с установленными на ней бункерами, механизмы подачи с приводами, блок управления, общий лоток 1 для всех компонентов, установленный с возможностью вращения вокруг его горизонтальной оси 2, два датчика веса 3, стационарно установленных на концах оси вращения лотка.
Однако производительность системы низкая, так как каждый из шестнадцати компонентов дозируется поочередно в общий лоток, что занимает много времени, кроме того, система имеет невысокую точность дозирования, что особенно отрицательно сказывается при микродозировании, где важна высокая точность измерения. Дозирование в один лоток всех компонентов не позволяет уменьшить номинал датчиков веса, а с увеличением их номинала увеличивается и погрешность измерения датчиков веса, что снижает точность дозирования.
Недостатком системы является также наличие кинематической связи между лотком и датчиками веса, отрицательно влияющей на последние. А именно, на датчики веса влияет механизм вращения лотка, так как они закреплены на оси вращения лотка, совпадающей с его горизонтальной осью. В результате на датчики веса действуют разного рода нагрузки - вибрация, перекосы и другое. Например, нагрузки от соединительных муфт, установленных между осями двигателя и осью вращения лотка, от подшипников, установленных на оси вращения лотка и контактирующих с датчиками веса. Все это снижает точность дозирования, и, наконец, общая ось, на которой установлены датчики веса, является механической связью между ними и обеспечивает взаимное влияние их друг на друга, что также снижает точность дозирования.
Задачей заявляемого изобретения является повышение точности дозирования и производительности модуля.
Предлагаемый модуль содержит раму с установленными на ней бункерами, механизм подачи с приводами, блок управления, датчик веса и лоток.
В отличие от прототипа модуль дополнительно содержит лотки, каждый лоток закреплен на соответствующем ему датчике веса, все датчики веса закреплены на общей горизонтальной оси с возможностью совместного с лотками вращения.
Наличие дополнительных лотков позволяет дозировать в каждый лоток одновременно различные компоненты, что сокращает время дозирования всех компонентов, повышая производительность модуля, а также позволяет уменьшить номинал каждого датчика веса до суммы компонентов, поступающих в один лоток с учетом веса самого лотка. Это снижает погрешность измерения, повышая точность дозирования. Закрепление каждого лотка на соответствующем ему датчике веса, а всех датчиков веса - на общей горизонтальной оси с возможностью совместного с лотками вращения исключает кинематическую связь между лотком и датчиком, а значит исключает и нагрузки на датчик (вибрацию, перекосы и др. ), передаваемые этой связью. Это также повышает точность дозирования. Закрепление всех датчиков веса на общей горизонтальной оси позволяет производить одновременную выгрузку всех лотков, что повышает производительность модуля.
Таким образом, все отличительные признаки являются существенными и решают поставленную задачу.
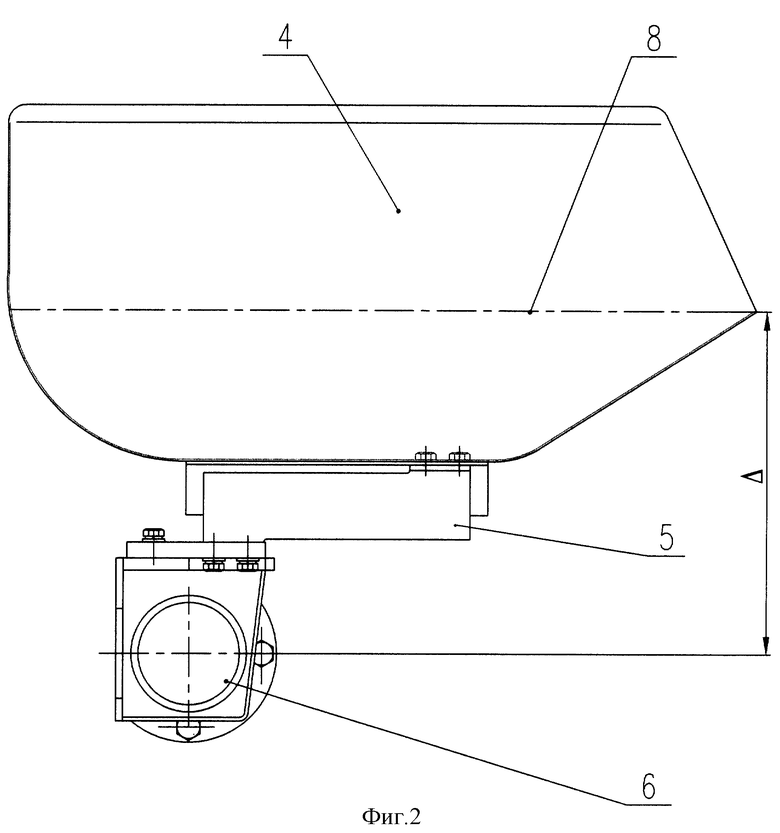
На фиг. 1 изображен модуль дискретного весового микродозирования, общий вид.
На фиг. 2 изображен узел крепления лотка к датчику веса, общий вид.
Модуль дискретного весового микродозирования (фиг. 1) содержит раму 1 с установленными на ней бункерами 2 для компонентов и связанные с ними механизмы подачи, например шнеки 3; лотки 4, закрепленные каждый на датчике веса 5 (фиг. 2), которые в свою очередь закреплены на общей оси вращения 6 лотков 4, установленной на раме 1. С каждым лотком 4 связано, например, по три (или другое количество) шнека: два - с одной стороны, один - с другой.
Управление модулем осуществляют через блок управления 7, связанный со шнеками 3 и датчиками веса 5. Ось вращения 6 смещена на величину Δ от горизонтальной оси лотков 8. Шнеки 3 приводятся во вращение приводом 9, а лотки 4 - приводом 10. Количество бункеров 2 в модуле может быть от 12 до 24 в расчете, что каждый лоток 4 связан с тремя или четырьмя бункерами 2 соответственно.
Модуль работает следующим образом.
Блоком управления 7 задается величина веса каждого дозируемого компонента. С помощью привода 9 приводят во вращение шнеки 3 и из бункеров 1 по ним поступает в каждый лоток 4 поочередно по одному компоненту. Как только вес каждого компонента достигнет заданной величины блок управления 7 снимет с датчиков веса 5 показания и даст команду на остановку шнеков 3. В зависимости от необходимости дозирования общего количества компонентов, например от шести до двадцати четырех, в каждый лоток 4 поступает соответственно от одного до четырех компонентов. Затем автоматически через блок управления 7 включается привод вращения лотков 10, они опрокидываются вместе с датчиками веса 5 и компоненты разгружаются в смеситель (на фиг. 1 не показано) для дальнейшей обработки. Процесс дозирования завершен.
Для увеличения объемов производства можно устанавливать любое количество модулей.
Пример расчета номинала датчика веса.
Например необходимо дозировать 18 компонентов в шесть лотков. Допустим, что максимальный вес каждого компонента равен 0,5 кг, если в каждый лоток дозировать по три компонента, а вес лотка равен 1 кг, то номинал каждого из шести датчиков веса равен P1 = 0,5 + 0,5 + 0,5 + 1 = 25, кг.
Погрешность измерения датчика веса составляет 0,1% от его номинала, поэтому при уменьшении номинала уменьшается погрешность измерения и повышается точность дозирования.
В данном примере погрешность измерения составит 0,0025 кг.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОДУЛЬ МНОГОКОМПОНЕНТНОГО ДОЗИРОВАНИЯ | 2014 |
|
RU2561825C1 |
| МОДУЛЬ МНОГОКОМПОНЕНТНОГО ДОЗИРОВАНИЯ | 2008 |
|
RU2375683C1 |
| МОДУЛЬ ДОЗИРОВАНИЯ МИКРОКОМПОНЕНТОВ | 2013 |
|
RU2534422C1 |
| ШНЕКОВЫЙ ДОЗАТОР | 2004 |
|
RU2259313C1 |
| СПОСОБ НЕПРЕРЫВНОГО ДОЗИРОВАНИЯ СЫПУЧИХ МАТЕРИАЛОВ | 2007 |
|
RU2366904C2 |
| РОТАЦИОННЫЕ ВЕСЫ-ДОЗАТОР ХОЗИНА В.В. | 2005 |
|
RU2382338C2 |
| ЛЕНТОЧНЫЙ ВЕСОВОЙ ДОЗАТОР | 2008 |
|
RU2387957C1 |
| СПОСОБ ДОЗИРОВАНИЯ | 2017 |
|
RU2660035C1 |
| СПОСОБ УПРАВЛЕНИЯ ЗАГРУЗКОЙ ШИХТЫ В СТЕКЛОВАРЕННУЮ ПЕЧЬ | 2007 |
|
RU2365539C1 |
| СПОСОБ УПРАВЛЕНИЯ ЗАГРУЗКОЙ ШИХТЫ В СТЕКЛОВАРЕННУЮ ПЕЧЬ | 2008 |
|
RU2374188C1 |
Изобретение используется для многокомпонентного микродозирования в фармацевтической промышленности и в сельском хозяйстве для производства кормов. Техническим результатом изобретения является повышение точности и производительности дозирования. Это обеспечивается за счет того, что модуль дискретного весового микродозирования содержит раму с установленными на ней бункерами, механизм подачи с приводами, блок управления, датчики веса и несколько лотков, причем каждый лоток закреплен на соответствующем ему датчике веса, все датчики веса закреплены на общей горизонтальной оси с возможностью совместного с лотками вращения. 2 ил.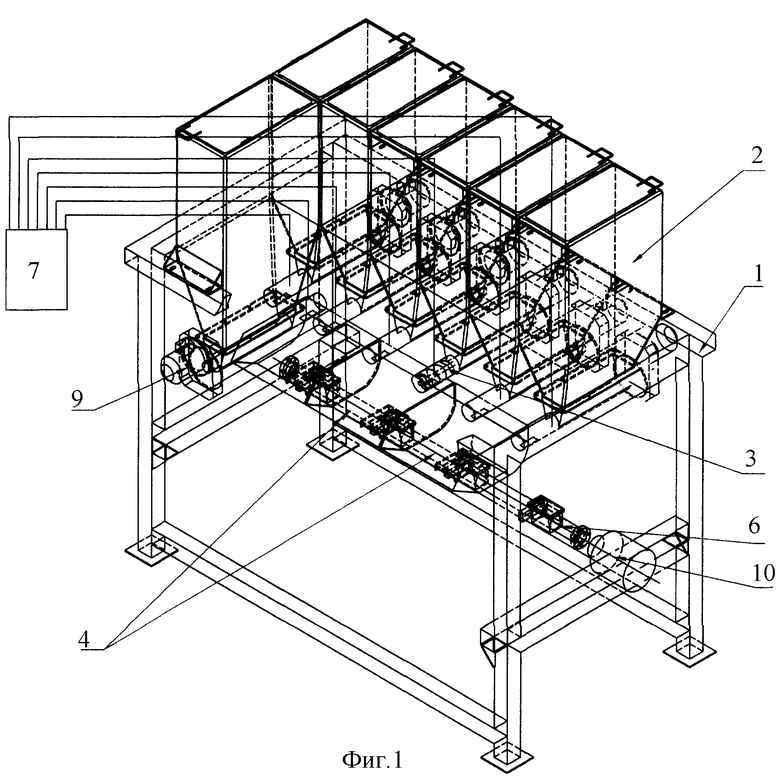
Модуль дискретного весового микродозирования, содержащий раму с установленными на ней бункерами, механизм подачи с приводами, блок управления, датчик веса и лоток, отличающийся тем, что он дополнительно содержит лотки, каждый лоток закреплен на соответствующем ему датчике веса, все датчики веса закреплены на общей горизонтальной оси с возможностью совместного с лотками вращения.
| Проспект фирмы ENGINEERED SYSTEMS and EQUIPMENT, INC | |||
| США | |||
| Способ дозированной подачи многокомпонентной смеси и устройство для его осуществления | 1985 |
|
SU1377593A1 |
| МНОГОСЕКЦИОННЫЙ ДОЗАТОР ДЛЯ ЗАТАРИВАНИЯ БИТУМА | 1997 |
|
RU2120112C1 |
| УСТАНОВКА ДЛЯ КОНТРОЛЯ ДОЗИРОВАНИЯ СЫПУЧИХ МАТЕРИАЛОВ | 1991 |
|
RU2027977C1 |
| GB 1077165 A, 26.07.1967 | |||
| ВОДОГРЕЙНЫЙ КОТЕЛ | 2003 |
|
RU2243454C1 |
