Изобретение относится к области насосостроения, в частности к динамическим насосам, приведение в действие которых осуществляется посредством электрических или механических приводов. Динамические насосы данной конструкции могут найти применение в различных отраслях хозяйственной деятельности для перекачивания жидких сред.
Известен насос, в котором рабочий орган образован по меньшей мере двумя пластинами, установленными с возможностью плоскопараллельного перемещения со скольжением по торцевым крышкам корпуса и образующим с плоскими шарнирно соединенными с ним элементами два параллелепипеда. Параллелепипеды связаны с приводным штоком, расположенным параллельно пластинам между ними и связан с ними элементами, шарнирно закрепленными на нем. Концы пластин снабжены цилиндрическими роликами для контакта с боковыми стенками корпуса с образованием по меньшей мере трех рабочих камер с распределительными органами [1].
Основным недостатком известного насоса является сложность конструкции его привода.
Известен также динамический насос, содержащий выполненный из немагнитного материала корпус с рабочим каналом, рабочий орган в виде пластины в форме плоскости горизонтального сечения рабочего канала, и привод, размещенный в плоскости, перпендикулярной продольной оси корпуса насоса [2]. В известном динамическом насосе рабочий орган выполнен из магнитного материала, привод - в виде двух подковообразных электромагнитов, охватывающих рабочий канал по концам рабочего органа. Кроме того, в стенках рабочего канала насоса, перпендикулярно рабочему органу, в зоне размещения его концов выполнены пазы, а рабочий орган снабжен по концам выступами, размещенными в этих пазах.
Известный динамический насос по функциональному назначению, по своей технической сущности и по достигаемому техническому результату наиболее близок к заявленному динамическому насосу.
Недостатком известного динамического насоса следует считать относительную его сложность из-за использования в нем двух приводов одного рабочего органа, для обеспечения работы которых требуется еще и сложная система управления.
В основу изобретения поставлена задача разработать более простую конструкцию динамического насоса путем упрощения схемы привода его рабочего органа.
Поставленная задача решается тем, что в динамическом насосе, содержащем выполненный из немагнитного материала корпус с рабочим каналом, рабочий орган в виде пластины в форме плоскости горизонтального сечения рабочего канала, и привод, размещенный в плоскости, перпендикулярной продольной оси корпуса насоса, линия пересечения плоскости, в которой размещен привод, с горизонтальной плоскостью рабочего органа делит плоскость рабочего органа на две неравные части, большая из которых размещена от линии пересечения плоскостей в сторону перемещения рабочей жидкости, точка приложения усилия к рабочему органу от привода размещена посередине линии пересечения этих плоскостей, причем в качестве привода установлен электромагнит, а рабочий орган в зоне приложения усилия к нему снабжен вставкой из магнитного материала.
Согласно второму варианту изобретения в качестве привода установлен механический привод, шток которого шарнирно соединен с рабочим органом в точке приложения усилия к последнему.
Объединение двух технических решений в одну заявку связано с тем, что две отдельные конструкции решают одну и ту же задачу - упрощение конструкции динамического насоса. Оба технических решения функционально равнозначны и позволили упростить схему привода насоса, но не могут быть объединены в один пункт формулы изобретения.
В заявленных динамических насосах общими существенными признаками для этих насосов и для их прототипа являются:
корпус из немагнитного материала с выполненным в нем рабочим каналом;
рабочий орган в виде пластины, выполненный по форме плоскости горизонтального сечения рабочего канала;
привод, размещенный в плоскости, перпендикулярной продольной оси корпуса насоса.
Сопоставительный анализ заявленных динамических насосов и прототипа показывает, что первые имеют, в отличие от прототипа, следующие существенные признаки:
линия пересечения плоскости, в которой размещен привод, с горизонтальной плоскостью рабочего органа делит плоскость рабочего органа на две неравные части;
большая часть плоскости рабочего органа размещена от линии пересечения плоскостей в сторону перемещения рабочей жидкости;
точка приложения усилия к рабочему органу от привода размещена посередине линии пересечения указанных выше плоскостей;
в качестве привода установлен электромагнит, а рабочий орган, в зоне приложения усилия к нему снабжен вставкой из магнитного материала (первый вариант);
в качестве привода установлен механический привод, шток которого шарнирно соединен с рабочим органом в точке приложения усилия к последнему (второй вариант).
Именно такая совокупность всех существенных признаков позволила разработать два варианта динамического насоса более простой конструкции.
На основании изложенного можно заключить, что все существенные признаки, характеризующие заявленные динамические насосы, имеют причинно-следственнную связь с достигнутым техническим результатом, т.е. обеспечивают получение технического результата во всех случаях, на который распространяется испрашиваемый объем правовой охраны двух вариантов динамического насоса. Благодаря данной совокупности существенных признаков стало возможным решить поставленную задачу.
Следовательно, заявленные варианты изобретения являются новыми и обладают изобретательским уровнем, т.е. они явным образом не следуют из уровня техники и пригодны для промышленного применения.
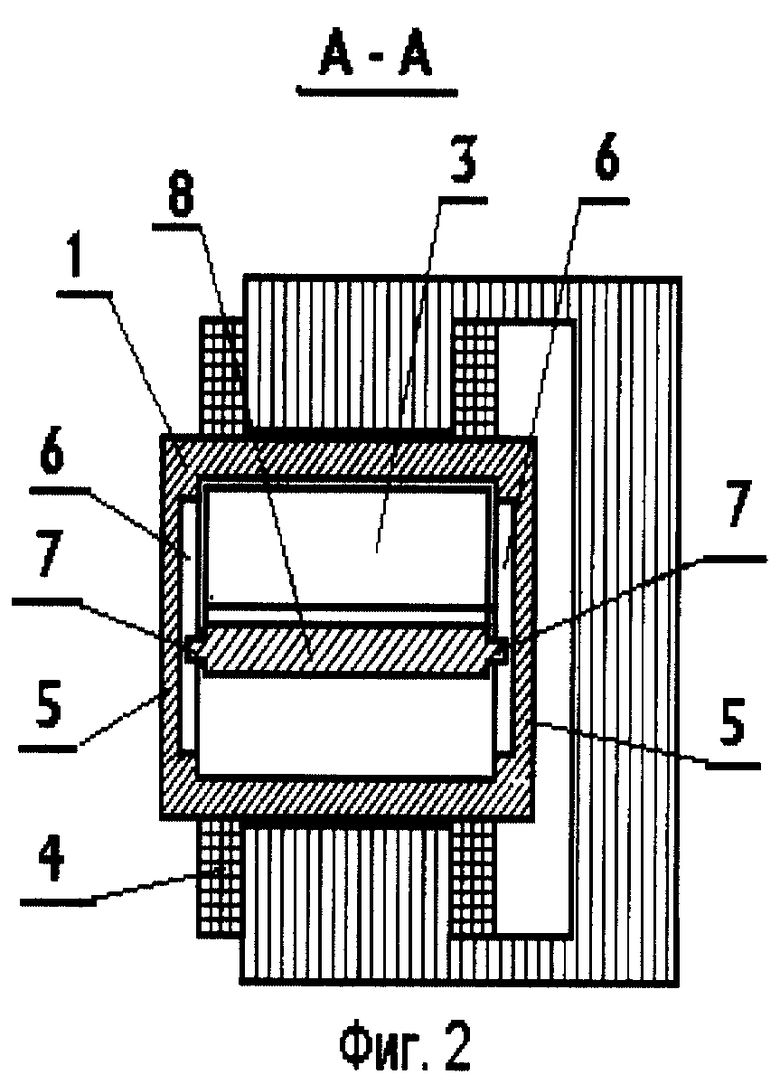
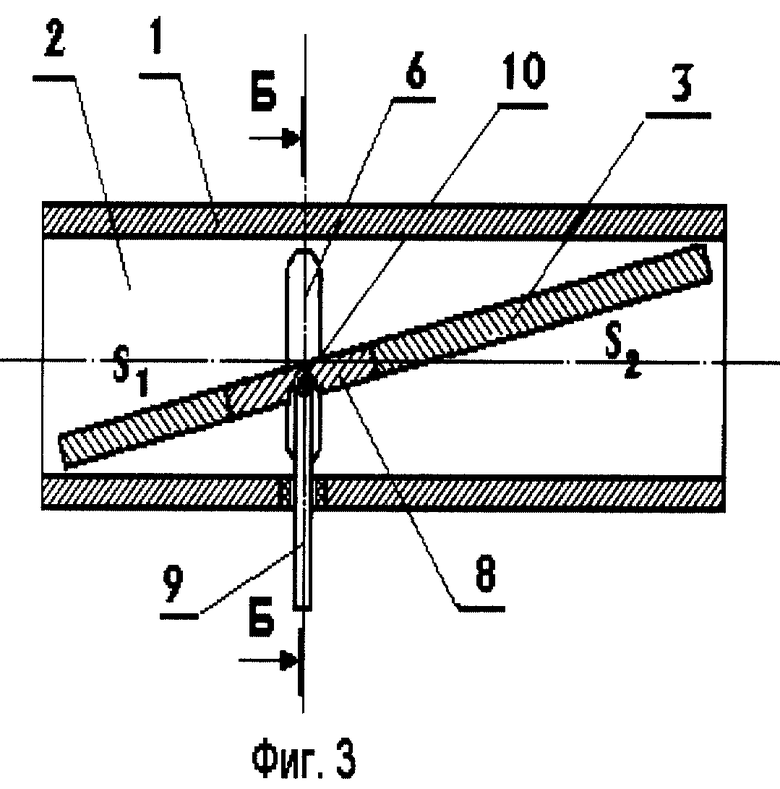
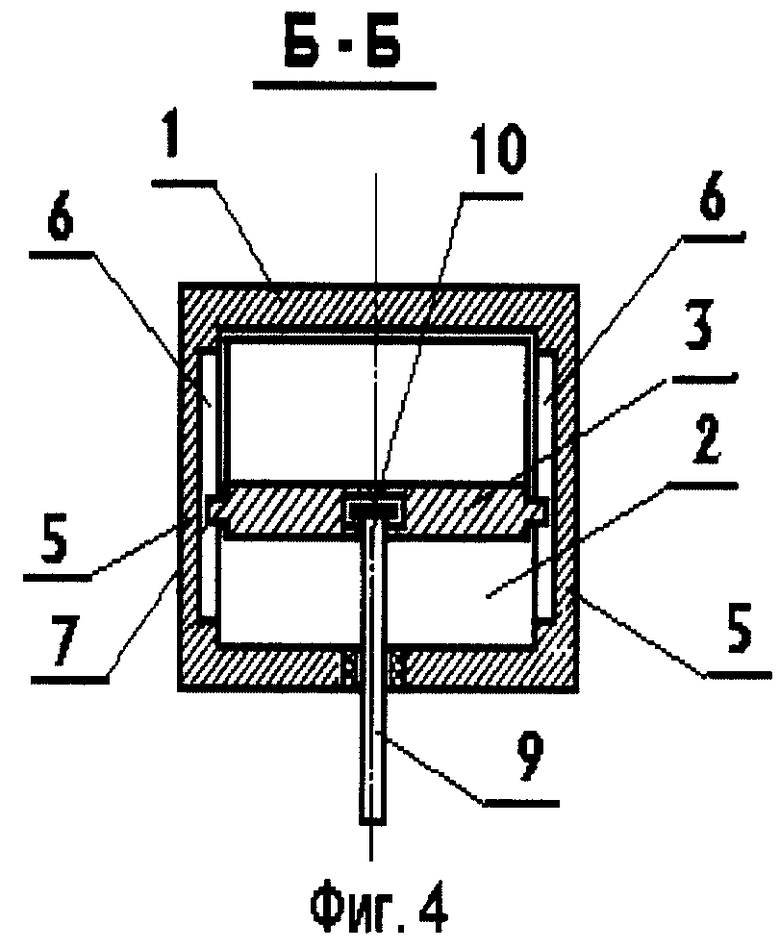
Сущность изобретения поясняется чертежом, где: на фиг.1 изображен продольный разрез динамического насоса, снабженного электромагнитным приводом; на фиг. 2 - разрез А-А на фиг.1; на фиг.3 изображен продольный разрез динамического насоса, снабженного механическим приводом; на фиг.4 - разрез Б-Б на фиг.3.
Динамический насос содержит выполненный из немагнитного материала корпус 1 с рабочим каналом 2, рабочий орган 3 в виде пластины в форме плоскости горизонтального сечения рабочего канала 2 и привод 4, размещенный в плоскости, перпендикулярной продольной оси корпуса 1. Линия пересечения плоскости, в которой размещен привод 4, с плоскостью рабочего органа 3 делит плоскость последнего на две неравные части S1 и S2, большая из которых S2 размещена от линии пересечения плоскостей в сторону перемещения рабочей жидкости. Точка приложения усилия к рабочему органу 3 от привода 4 размещена посередине линии пересечения указанных выше плоскостей. В вертикальных стенках 5 рабочего канала 2 в плоскости размещения привода 4 выполнены вертикальные пазы 6, а рабочий орган 3 снабжен соответствующими выступами 7, входящими в эти пазы 6. Привод насоса может быть выполнен как электромагнитным, так и механическим. В первом варианте привод 4 выполнен в виде одного подковообразного электромагнита постоянного тока, охватывающего рабочий канал 2. При таком конструктивном исполнении привода 4 рабочий орган 3 в зоне приложения усилия к нему снабжен вставкой 8 из магнитного материала (см. фиг.1 и 2). В случае установки на насос механического привода (на чертеже не показан) его шток 9 размещен в плоскости, перпендикулярной продольной оси корпуса насоса, и непосредственно соединен с рабочим органом 3 посредством шарнирного соединения 10. Рабочий орган 3 в этом случае выполнен из немагнитного материала (см. фиг.3 и 4).
Динамический насос (первый вариант) работает следующим образом. При подаче питания на привод 4, выполненный в виде электромагнита, попеременно меняют фазу и на его полюсах происходит поочередная смена полярности. Рабочий орган 3, снабженный вставкой 8, выполненной из магнитного материала и обладающей свойством постоянного магнита, поочередно притягивается и отталкивается от полюсов электромагнита и таким образом перемещается то к верхней, то к нижней стенкам рабочего канала 2. При этом рабочий орган 3 совершает следующие движения. Из-за неравенства площадей S1 и S2 концов рабочего органа 3 относительно точки приложения усилия к нему первым перемещение к верхней горизонтальной стенке рабочего канала 2 начнет и достигнет ее конец рабочего органа 3 с меньшей площадью S1, а затем - второй его конец с большей площадью S2. В этот период под рабочим органом создается разряжение, а над ним - динамический напор, обусловленный осевой составляющей скорости движения перекачиваемой жидкости. В конце упомянутых ходов рабочий орган 3 займет верхнее положение в рабочем канале 2 и будет притянут вставкой 8 к верхнему полюсу электромагнита. После этого меняют полярность на электромагните и в описанной выше последовательности рабочий орган 3 переместится к нижней горизонтальной стенке рабочего канала 2 и притягивается вставкой 8 к нижнему полюсу электромагнита.
В процессе последних движений рабочего органа 3 над ним создается разряжение, а под ним - динамический напор, обусловленный осевой составляющей скорости движения перекачиваемой жидкости. Далее цикл повторяется. При рассмотренных перемещениях рабочего органа 3 создается направленное движение перекачиваемой жидкости в рабочем канале 2 от части рабочего органа 3 с меньшей площадью S1 в сторону части рабочего органа 3 с большей площадью S2. Пазы 6 и выступы 7 предназначены для предотвращения осевого перемещения рабочего органа 3 по рабочему каналу 2 под действием реактивной силы со стороны потока перекачиваемой жидкости.
При использовании в динамическом насосе механического привода (второй вариант) рабочий орган 3 совершает аналогичные перемещения под воздействием штока 9, таким же образом воздействует на жидкость и формирует ее в поток перекачиваемой жидкости.
Такие конструктивные решения динамического насоса, преимущественно его привода, позволилb существенно упростить конструкцию насоса в целом.
Источники информации
1. Авторское свидетельство СССР N 1837121, F 04 В 19/20, 1990 г. (опубл. 30.08.93 г., бюл. 32).
2. Авторское свидетельство СССР N 879013, F 04 В 17/04, 1979 г. (опубл. 07.11.81 г., бюл. 41) - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ И ОТСЛЕЖИВАНИЯ ЭЛЕКТРОПРОВОДНОГО ПРОТЯЖЕННОГО ПОДВОДНОГО ОБЪЕКТА С БОРТА ПОДВОДНОЙ ПОИСКОВОЙ УСТАНОВКИ | 1998 |
|
RU2136020C1 |
| ВЫСОКОМАНЕВРЕННЫЙ АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 1997 |
|
RU2112694C1 |
| ПОГРУЖНОЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД ДЛЯ ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ ПОДВОДНЫХ ТЕХНИЧЕСКИХ СРЕДСТВ | 1998 |
|
RU2140574C1 |
| ПОДВОДНЫЙ АППАРАТ ПОВЫШЕННОЙ МАНЕВРЕННОСТИ | 1996 |
|
RU2101210C1 |
| КАБЕЛЬНЫЙ НАКОНЕЧНИК | 1991 |
|
RU2020680C1 |
| ПРЕОБРАЗОВАТЕЛЬ ФАЗИРОВАННОЙ АНТЕННЫ ДЛЯ ДОПЛЕРОВСКОГО ЛАГА | 1996 |
|
RU2110888C1 |
| ПОГРУЖНОЙ ЭЛЕКТРОХИМИЧЕСКИЙ ГЕНЕРАТОР | 1992 |
|
RU2041533C1 |
| ШИРОКОПОЛОСНЫЙ НИЗКОЧАСТОТНЫЙ ГИДРОАКУСТИЧЕСКИЙ ИЗЛУЧАТЕЛЬ | 1997 |
|
RU2136122C1 |
| ПОДВОДНЫЙ АППАРАТ | 1996 |
|
RU2116930C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ МЕЛКОГО МОРЯ | 1999 |
|
RU2158431C1 |
Изобретение относится к области насосостроения. Динамический насос содержит выполненный из немагнитного материала корпус с рабочим каналом 2, рабочий орган 3 в виде пластины в форме плоскости горизонтального сечения рабочего канала 2 и привод 4, размещенный в плоскости, перпендикулярной оси корпуса 1. Линия пересечения плоскости, в которой размещен привод 4, с плоскостью рабочего органа 3 делит плоскость последнего на две неравные части S1 и S2, большая из которых размещена от линии пересечения плоскостей в сторону перемещения рабочей жидкости. Точка приложения усилия к рабочему органу 3 от привода 4 размещена посередине линии пересечения указанных выше плоскостей. В вертикальных стенках 5 рабочего канала 2 в плоскости размещения привода 4 выполнены вертикальные пазы 6, а рабочий орган 3 снабжен соответствующими выступами, входящими в эти пазы 6. В первом варианте привод 4 выполнен в виде одного подковообразного электромагнита постоянного тока, охватывающего рабочий канал 2, а рабочий орган 3 в зоне приложения усилия к нему снабжен вставкой 8 из магнитного материала. В случае установки на насос механического привода его шток непосредственно соединен с рабочим органом посредством шарнирного соединения. Использование изобретения позволяет упростить конструкцию насоса. 2 с. з.п.ф-лы, 4 ил.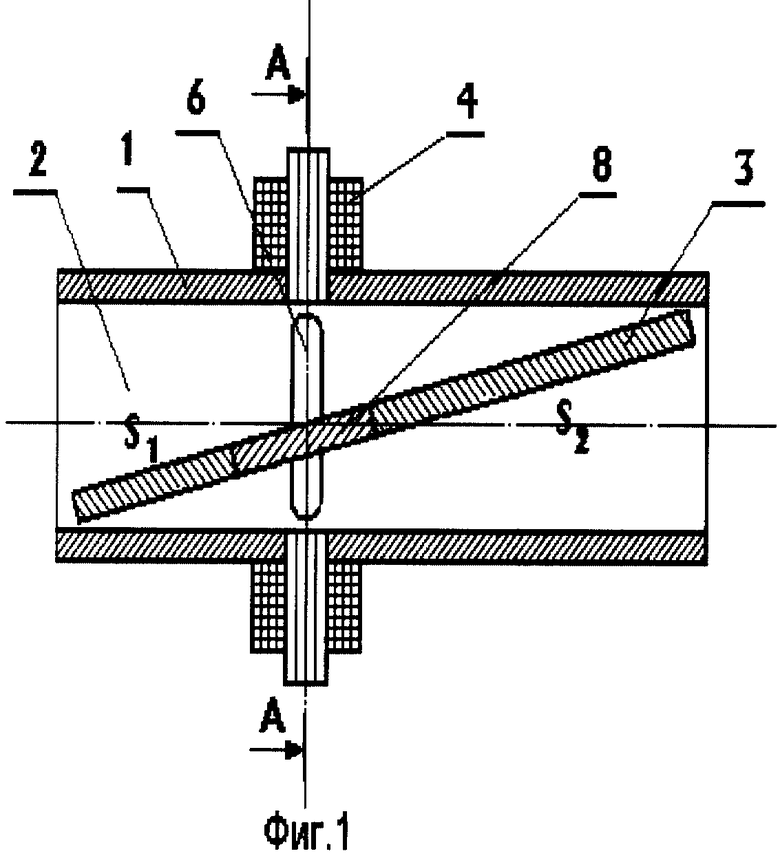
| Динамический насос | 1979 |
|
SU879013A1 |
| Насос | 1991 |
|
SU1822469A3 |
| Пуговица | 0 |
|
SU83A1 |

