Изобретение относится к судостроению, а именно к техническим средствам для исследования и освоения морских глубин к подводным аппаратам, преимущественно к автономным необитаемым подводным аппаратам.
Известен подводный аппарат повышенной маневренности, содержащий обтекаемый корпус и движительный комплекс, включающий группу носовых поперечных движителей и группу из трех или четырех кормовых маршевых реверсивных движителей.
Данный подводный аппарат выбран в качестве наиболее близкого аналога изобретения.
Недостатком конструкции известного аппарата является размещение кормовых маршевых движителей вместе с гребными электродвигателями с внешней стороны корпуса аппарата. Такое конструктивное решение аппарата значительно снизило эффективность его перемещения преимущественно на прямом ходу из-за дополнительного сопротивления, создаваемого движительным комплексом, а также эксплуатационную надежность аппарата.
Целью изобретения является повышение эффективности перемещения аппарата как на прямых курсах, так и при маневрировании, выполнении им поперечных перемещений и стабилизации в точке, а также повышение эксплуатационной надежности.
Цель достигается тем, что в подводном аппарате, содержащем обтекаемый корпус и движительный комплекс, включающий группу носовых поперечных движителей и группу из трех или четырех кормовых маршевых реверсивных движителей, в качестве маршевых движителей установлены реверсивные водометные движители, которые размещены в корпусе аппарата в его кормовой оконечности, водометные трубы, входные и выходные патрубки движителей жестко закреплены в корпус аппарата, причем входные патрубки отогнуты от продольной оси аппарата на угол 20-50o, а выходные патрубки установлены под углом 0-25o к продольной оси аппарата.
Кроме того, входные отверстия входных патрубков маршевых движителей выполнены в виде единой кольцевой щели по периметру корпуса аппарата в его поперечном сечении.
Кроме того, в выходных отверстиях выходных патрубков кормовых маршевых водометных движителей установлены направляющие пластины так, что их хорды наклонены под углом 5-30o к продольной оси аппарата.
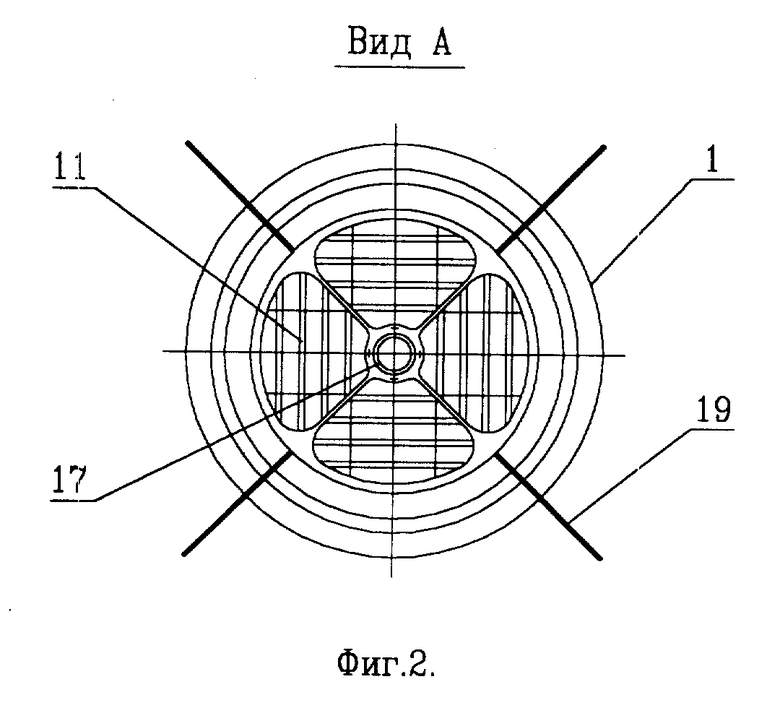
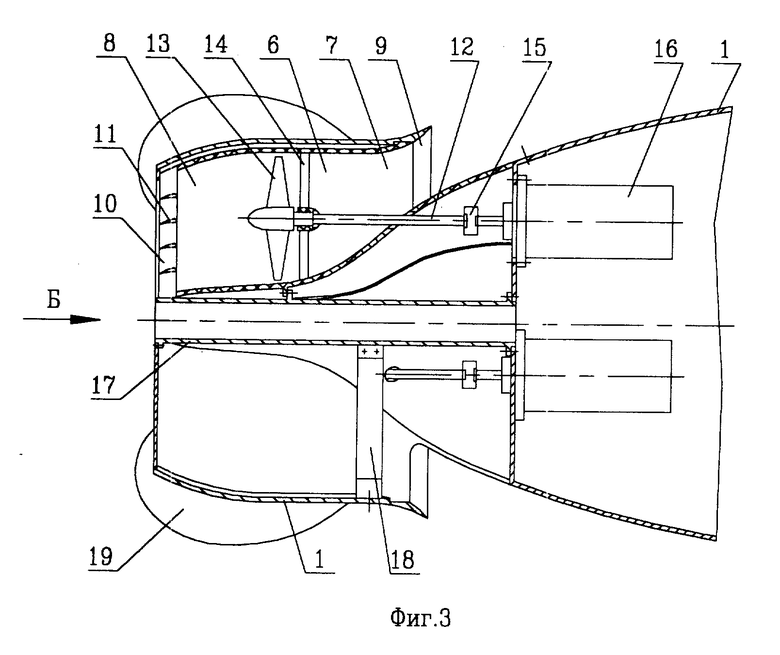
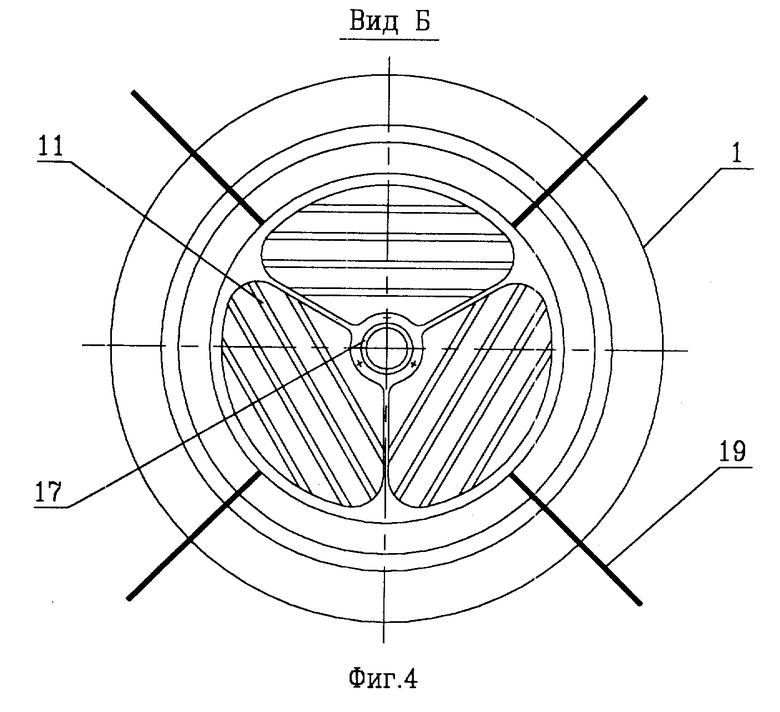
На фиг. 1 изображен аппарат, снабженный четырьмя маршевыми реверсивными водометными движителями, установленными в кормовой оконечности аппарата попарно в двух взаимно перпендикулярных плоскостях вертикальной и горизонтальной на фиг. 2 вид по стрелке А на фиг. 1; на фиг. 3 вариант аппарата, кормовая оконечность которого снабжена тремя маршевыми реверсивными водометными движителями, установленными под углом 120o друг относительно друга; на фиг. 4 вид по стрелке Б на фиг. 3.
Подводный аппарат содержит обтекаемый корпус 1 и движительный комплекс, включающий носовую и кормовую движительные установки.
Носовая движительная установка аппарата включает группу из двух поперечных реверсивных водометных движителей 2 и 3, установленных в тоннелях 4 и 5 аппарата, причем движитель 2 установлен в вертикальной плоскости аппарата, а движитель 3 установлен в горизонтальной плоскости аппарата. Данная группа движителей предназначена для создания только поперечных сил.
Кормовая движительная установка аппарата включает группу из трех или четырех маршевых реверсивных водометных движителей. Все водометные движители по конструкции идентичны и размещены внутри обтекаемого корпуса 1 в кормовой части аппарата. При движительной установке аппарата состоящей из трех (минимально возможное количество) водометных движителей, последние устанавливаются под углом 120o друг относительно друга (фиг. 3 и 4). Если движительная установка аппарата состоит из четырех водометных движителей, то они устанавливаются попарно в двух взаимно перпендикулярных плоскостях, а именно в вертикальной и горизонтальной (фиг. 1 и 2).
Кормовая движительная установка обеспечивает перемещение аппарата не только вперед или назад и маневрирование по курсу, но используется активно и при выполнении аппаратом операций с применением сложного маневрирования по любой пространственной траектории, в том числе, и при перемещении лагом и стабилизации в точке.
В кормовой движительной установке подводного аппарата водометная труба 6, входной патрубок 7 и выходной патрубок 8 каждого маршевого водометного движителя размещены внутри обтекаемого корпуса 1 и жестко закреплены в нем.
Конструктивные особенности каждого маршевого водометного движителя одинаковы и состоят прежде всего в том, что его входной патрубок 7 отогнут от продольной оси аппарата на угол 20-50o, а выходной патрубок 8 установлен под углом 0-25o к продольной оси аппарата. Кроме того, входные отверстия 9 входных патрубков 7 маршевых водометных движителей выполнены в виде единой кольцевой щели по периметру обтекаемого корпуса 1 аппарата в поперечном сечении. В выходном отверстии 10 выходного патрубка 8 каждого маршевого водометного движителя установлены направляющие пластины 11, причем их хорды наклонены под углом 5-30o к продольной оси аппарата. В водометной трубе 6 каждого движителя на валу 12 установлен гребной винт 13. Вал 12, непосредственно у гребного винта 13, установлен в подшипнике скольжения опоры 14, а с другой стороны посредством муфты 15 вал 12 присоединен к реверсивному электродвигателю 16. В кормовой части аппарата вдоль его продольной оси установлен жесткий элемент 17, например, в виде трубы, жестко связанный посредством стоек 18 с обтекаемым корпусом 1. С внешней стороны обтекаемого корпуса 1 в кормовой оконечности аппарата установлены стабилизаторы 19.
Перемещение подводного аппарата и маневрирование им осуществляется непосредственно его движительным комплексом по командам, поступающим с системы управления аппаратом.
Трехдвижительная маршевая кормовая установка подводного аппарата по техническим характеристикам и возможностям ни в чем не уступает четырехдвижительной установке. Движение подводного аппарата вперед или назад, маневрирование им по курсу, перемещение аппарата в поперечных направлениях или его стабилизация в точке с помощью трехдвижительной кормовой маршевой установки осуществляется так же, как и с помощью четырехдвижительной кормовой маршевой установки. Таким образом, нет необходимости описывать работу подводного аппарата с каждой такой кормовой маршевой установкой, а достаточно описать работу аппарата, например, только с четырехдвижительной установкой.
Подводный аппарат, оснащенный маршевой кормовой водометной четырехдвижительной установкой, работает следующим образом.
Подготовленный к работе подводный аппарат опускают с судна-носителя в воду. Имея минимальную положительную плавучесть, подводный аппарат практически весь погружается в воду, при этом водометные трубы 6 всех кормовых маршевых водометных движителей, а также тоннели 4 и 5 носовой группы поперечных движетелей заполняются водой.
При поступлении в движительный комплекс команды "движение вперед" одновременно включаются электродвигатели 16 всех кормовых маршевых водометных движителей, причем с одинаковым заданным числом оборотов (носовая движительная установка при этом не включается). Вращение электродвигателя 16 каждого маршевого движителя посредством вала 12 передается на его гребной винт 13. Вода, находящаяся в водометной трубе 6 каждого движителя кормовой группы, под воздействием вращения гребного винта 13 с ускорением выбрасывается из выходного патрубка 8, создавая равный по величине упор под одним и тем же углом к продольной оси подводного аппарата. Создаваемый каждым маршевым водометным движителем упор имеет две составляющие, одна (большая) из которых направлена вдоль продольной оси аппарата, а другая направлена перпендикулярно направлению первой составляющей. Составляющие упора, направленные вдоль продольной оси аппарата, всех кормовых маршевых движителей суммируются и обеспечивают движение подводного аппарата вперед по заданному курсу. Составляющие, направленные перпендикулярно первым, у всех маршевых движителей также равны по величине, но противоположны по направлению и вследствие этого компенсируют друг друга, не оказывая влияния на движение подводного аппарата вперед.
Для выполнения подводным аппаратом маневра по курсу при его движении вперед подается соответствующая команда, например, на один маршевый движитель, установленный в горизонтальной плоскости. Движители, установленные в горизонтальной плоскости аппарата, в этом случае создают разные по величине упоры, а следовательно, и разные по величине их составляющие, направленные перпендикулярно продольной оси подводного аппарата. В таком режиме разность составляющих, направленных перпендикулярно продольной оси подводного аппарата горизонтально установленных маршевых движителей, отлична от нуля и под воздействием этой разности составляющих аппарат изменяет курс в необходимую сторону. Аналогичным образом выполняется маневрирование подводным аппаратом по дифференту кормовыми маршевыми движителями, установленными в вертикальной плоскости подводного аппарата.
Перемещение подводного аппарата задним ходом осуществляется по соответствующей команде на маршевые водометные движители. По команде "задний ход" электродвигатели 16 всех маршевых движителей изменяют вращение гребных винтов 13 на противоположное. В этом случае гребные винты 13 движителей с ускорением выбрасывают воду из водометных труб 6 наружу через входные патрубки 7 под углом 20-50o от продольной оси аппарата в сторону его носовой части. Составляющие упора, направленные вдоль продольной оси аппарата в сторону его носовой части всех маршевых движителей, суммируются и обеспечивают движение подводного аппарата назад по заданному курсу. Составляющие, направленные перпендикулярно первым составляющим, как и на переднем ходу, взаимно компенсируют друг друга, не оказывают влияния на движение аппарата по курсу назад. Маневрирование подводным аппаратом по курсу и дифференту на заднем ходу выполняется аналогично маневрированию аппаратом на переднем ходу.
Перемещение подводного аппарата в поперечном направлении, например, перемещение его лагом при отсутствии хода осуществляется также по соответствующей команде. В этом случае включается горизонтальный движитель 3 носовой движительной установки подводного аппарата и маршевые движители кормовой группы, установленные в горизонтальной плоскости аппарата. При этом движитель, установленный с того борта аппарата, в сторону которого необходимо переместить аппарат лагом, работает на ход вперед, а другой маршевый горизонтальный движитель работает на ход назад. Упор, создаваемый носовым горизонтальным движителем 3 и поперечные составляющие упоров, создаваемых горизонтальными кормовыми маршевыми движителями, суммируются, обеспечивая перемещения аппарата лагом. Продольные составляющие упоров, создаваемых этими кормовыми маршевыми движителями, компенсируют друг друга. Аналогичным образом выполняется перемещение подводного аппарата в вертикальной плоскости. В этом случае в работу включаются вертикально установленный движитель 2 носовой группы и соответствующие маршевые движители кормовой группы, установленные в вертикальной плоскости аппарата.
Для стабилизации подводного аппарата в заданной точке по команде включаются все движители. Направление и скорость вращения гребных винтов движителей задается такой, чтобы описанными выше способами исключить продольные, поперечные и угловые перемещения подводного аппарата, т.е. выполнить стабилизацию в точке.
Использование: судостроение. Сущность: подводный аппарат повышенной маневренности содержит обтекаемый корпус и движительный комплекс, включающий группу носовых поперечных движителей и группу из трех или четырех кормовых маршевых реверсивных движителей. В качестве маршевых движителей установлены реверсивные водометные движители, которые размещены в корпусе аппарата в его кормовой части. Водометные трубы, входные и выходные патрубки движителей жестко закреплены в корпусе аппарата. Входные патрубки отогнуты от продольной оси аппарата на угол 20o-50o, а выходные патрубки установлены под углом 0o-25o к продольной оси аппарата. 2 з.п. ф-лы, 4 ил.
| Сборник статей Института проблем морских технологий ДВО РАН "Подводные работы и их системы" / Под общей ред | |||
| члена-корреспондента РАН М.Д.Агеева, вып.5 -Владивосток, 1992, с | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
